低軌遙感衛(wèi)星姿態(tài)解耦控制設(shè)計(jì)與仿真
2021-03-03 08:28:22潘立鑫王勝剛袁軍王琳琳
航天器工程 2021年1期
潘立鑫 王勝剛 袁軍 王琳琳
(1 北京控制工程研究所, 北京 100094)(2 內(nèi)蒙古工業(yè)大學(xué), 呼和浩特 010080)
隨著航天技術(shù)的發(fā)展,用戶對低軌遙感衛(wèi)星姿態(tài)控制精度及機(jī)動能力的要求越來越高。對于衛(wèi)星姿態(tài)控制系統(tǒng)而言,滾動、俯仰和偏航通道之間的交叉耦合,使姿態(tài)控制系統(tǒng)成為一個(gè)非線性強(qiáng)耦合的復(fù)雜多變量系統(tǒng)。針對低軌遙感衛(wèi)星運(yùn)動的非線性強(qiáng)耦合特性,人們應(yīng)用如動態(tài)逆[1-2]、神經(jīng)網(wǎng)絡(luò)[3-4]、滑模變結(jié)構(gòu)[5-6]、魯棒控制[7-8]等解耦方法設(shè)計(jì)了衛(wèi)星姿態(tài)控制系統(tǒng),并取得了一定的成果,但由于未考慮執(zhí)行機(jī)構(gòu)特性,物理意義不明確,應(yīng)用仍相對較少。
解耦控制方法是解決非線性強(qiáng)耦合多變量系統(tǒng)控制設(shè)計(jì)的一種有效方法。針對低軌遙感衛(wèi)星動力學(xué)模型中存在滾動、俯仰和偏航通道之間的耦合關(guān)系,利用解耦控制方法,通過選取解耦控制向量能夠?qū)⑾到y(tǒng)動力學(xué)模型轉(zhuǎn)換為3個(gè)通道彼此獨(dú)立的子系統(tǒng)模型。以等效的子系統(tǒng)模型作為研究對象,針對3個(gè)通道分別設(shè)計(jì)姿態(tài)控制律,可有效解決耦合影響引起的衛(wèi)星姿態(tài)難于控制的問題,能進(jìn)一步提升優(yōu)化控制性能指標(biāo)。
本文采用經(jīng)典的狀態(tài)反饋解耦設(shè)計(jì)[9-10],依據(jù)低軌遙感衛(wèi)星姿態(tài)解耦控制設(shè)計(jì)原理,通過動量輪轉(zhuǎn)速調(diào)節(jié)產(chǎn)生控制力矩,實(shí)現(xiàn)衛(wèi)星3軸姿態(tài)穩(wěn)定對地飛行或偏置飛行。在衛(wèi)星正常對地飛行時(shí),動量輪均運(yùn)行在偏置標(biāo)稱轉(zhuǎn)速,構(gòu)成整星零動量。在衛(wèi)星進(jìn)行滾動側(cè)擺(或偏航定標(biāo))時(shí),動量輪轉(zhuǎn)速偏離標(biāo)稱轉(zhuǎn)速,進(jìn)而通過動量輪角動量變化產(chǎn)生衛(wèi)星機(jī)動控制力矩。由于該設(shè)計(jì)在系統(tǒng)結(jié)構(gòu)上將衛(wèi)星運(yùn)動耦合模型分解為滾動、俯仰和偏航3個(gè)子系統(tǒng)分別進(jìn)行分析,因此能降低控制器設(shè)計(jì)的難度,解耦后可獨(dú)立設(shè)計(jì)比例積分微分(PID)控制器;另外,在進(jìn)行解耦控制參數(shù)設(shè)計(jì)時(shí),可以充分借鑒和引用成熟的PID參數(shù)整定方法,從而實(shí)現(xiàn)衛(wèi)星姿態(tài)控制的快速穩(wěn)定調(diào)節(jié)。
1 低軌遙感衛(wèi)星姿態(tài)解耦控制設(shè)計(jì)
本文姿態(tài)解耦設(shè)計(jì)的總體思路為:首先,在衛(wèi)星動力學(xué)耦合模型的基礎(chǔ)上,依據(jù)狀態(tài)反饋解耦控制原理,通過設(shè)計(jì)解耦控制律,將動力學(xué)耦合模型等效轉(zhuǎn)換為滾動、俯仰、偏航3個(gè)獨(dú)立的子系統(tǒng)模型;然后,針對子系統(tǒng)模型,分別設(shè)計(jì)各通道回路的PID控制器,并從頻域指標(biāo)的角度提出控制參數(shù)的選取方法。
1.1 衛(wèi)星動力學(xué)模型
對于低軌遙感衛(wèi)星,若姿態(tài)控制系統(tǒng)的帶寬設(shè)計(jì)合理,則太陽翼撓性振動將在自身阻尼作用下被動抑制。因此,忽略撓性因素,考慮如下簡化的動力學(xué)模型[11]。
(1)
式中:X,Y,Z為衛(wèi)星本體坐標(biāo)系的坐標(biāo)軸;IX,IY,IZ為衛(wèi)星3軸的轉(zhuǎn)動慣量;ωX,ωY,ωZ為衛(wèi)星3軸的慣性角速度;hX,hY,hZ為飛輪在衛(wèi)星本體坐標(biāo)系下的角動量;ud,X,ud,Y,ud,Z為外干擾力矩ud在衛(wèi)星本體坐標(biāo)系下的分量。
1.2 衛(wèi)星姿態(tài)解耦控制律設(shè)計(jì)

對式(2)線性化,并做拉氏變換,經(jīng)化簡得式(3)。式(3)中:s為拉氏變換的復(fù)頻率變量;φ(0),θ(0),ψ(0)分別為滾動、俯仰和偏航的初始姿態(tài)角;等號左端第3項(xiàng)反映了初始姿態(tài)角對姿態(tài)輸出的影響。
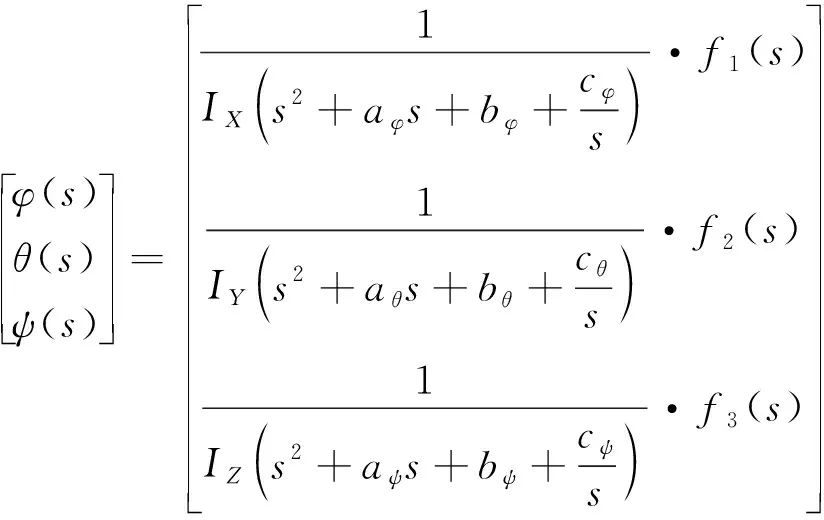
根據(jù)式(3)的耦合結(jié)構(gòu),取解耦控制向量,得到式(4)。式(4)中:aφ,bφ,cφ,aθ,bθ,cθ,aψ,bψ,cψ分別為根據(jù)響應(yīng)性能指標(biāo)選定的參數(shù)。
將式(4)代入式(3),整理得式(5)。式(5)給出了衛(wèi)星姿態(tài)動力學(xué)模型在解耦后各單回路的誤差傳遞函數(shù)。通過誤差傳遞函數(shù)表達(dá)式,可以等效設(shè)計(jì)各單回路的PID控制器,進(jìn)而滿足各項(xiàng)姿態(tài)控制指標(biāo)的要求。
(2)
(3)
(4)
(5)
1.3 基于頻域分析的控制參數(shù)選取方法
式(4)等號右端第2個(gè)矩陣主對角線上的元素構(gòu)成體現(xiàn)了PID控制設(shè)計(jì)的思想。要確定式(4)中未知的控制參數(shù),本質(zhì)上就是對解耦后的單回路PID控制參數(shù)進(jìn)行整定。通常,可首先設(shè)計(jì)比例微分(PD)控制參數(shù),然后考慮加入積分控制提高系統(tǒng)的穩(wěn)態(tài)精度。下面以滾動回路為例,從系統(tǒng)帶寬設(shè)計(jì)進(jìn)行分析,從而總結(jié)出控制參數(shù)定量選取時(shí)需滿足的約束關(guān)系。
1.3.1 PD控制參數(shù)的選取
在系統(tǒng)穩(wěn)定的前提下,將衛(wèi)星外部干擾力矩作為系統(tǒng)的輸入,通過合理設(shè)計(jì)系統(tǒng)的帶寬實(shí)現(xiàn)對太陽翼撓性等外部干擾的抑制。解耦后,滾動回路干擾力矩到姿態(tài)輸出的簡化PD控制框圖如圖1所示。圖1中:ωX為滾動角速度;φr為期望滾動角;Kp,φ為滾動回路比例控制參數(shù);Kd,φ為滾動回路微分控制參數(shù);G(s)為滾動回路前向通路上的開環(huán)傳遞函數(shù)。

圖1 滾動回路控制框圖Fig.1 Control block of roll loop
當(dāng)控制參數(shù)Kp,φ=bφ,Kd,φ=aφ時(shí),圖1中系統(tǒng)的閉環(huán)傳遞函數(shù)為
(6)
閉環(huán)系統(tǒng)的幅頻特性為
(7)
式中:M(ω)為幅頻值,ω為復(fù)頻率。
根據(jù)系統(tǒng)帶寬ωb的定義,有
(8)
即
(9)
將式(9)代入式(7),整理得到系統(tǒng)帶寬與控制參數(shù)關(guān)系為
(10)
當(dāng)給定期望控制系統(tǒng)帶寬ωb后,可根據(jù)式(10)確定控制參數(shù)Kp,φ與Kd,φ的約束關(guān)系,根據(jù)系統(tǒng)的設(shè)計(jì)需求得到各回路PD控制參數(shù)的可選域。
1.3.2 積分控制參數(shù)的選取
PD控制參數(shù)選定后,穩(wěn)態(tài)控制中可引入積分器消除穩(wěn)態(tài)誤差,進(jìn)而提高控制精度,給定積分控制參數(shù)Ki,φ的選取規(guī)則如下。①在姿態(tài)偏差較大(如姿態(tài)機(jī)動)時(shí)不使用積分項(xiàng),以保證快速性;②在穩(wěn)態(tài)控制時(shí)引入積分,以補(bǔ)償常值干擾力矩,提高穩(wěn)態(tài)精度;③積分項(xiàng)輸出進(jìn)行限幅;④姿態(tài)角偏差符號改變時(shí)對積分器復(fù)位。
2 仿真分析
以資源一號02D衛(wèi)星為研究對象,進(jìn)行姿態(tài)解耦控制的仿真與分析。資源一號02D衛(wèi)星采用降交點(diǎn)地方時(shí)10:30am的太陽同步回歸軌道,軌道傾角98.505 5°,軌道平均高度778.099 km,衛(wèi)星在軌壽命5年。相比于同類近地遙感衛(wèi)星[12],資源一號02D衛(wèi)星在姿態(tài)指向精度和姿態(tài)控制穩(wěn)定度指標(biāo)方面都具有更高的要求。其控制分系統(tǒng)主要性能指標(biāo)分別為:3軸姿態(tài)指向精度優(yōu)于0.03°(3σ);3軸姿態(tài)控制穩(wěn)定度優(yōu)于5×10-4(°)/s(3σ)。衛(wèi)星轉(zhuǎn)動慣量為diag(2080,2045,3007)(kg·m2),飛輪最大力矩為0.13 N·m。
考慮對衛(wèi)星外部干擾的抑制,取滾動回路的系統(tǒng)帶寬為0.01 Hz。根據(jù)式(10),選取Kp,φ=bφ=15,Kd,φ=aφ=1500,同時(shí)給定積分參數(shù)Ki,φ=cφ=1。采取同樣的方法,選取俯仰回路參數(shù)bθ=13.5,aθ=1350,cθ=0.5,選取偏航回路參數(shù)bψ=20.2,aψ=2020,cψ=0.4,設(shè)定積分器的限幅為0.02。
圖2和圖3分別為資源一號02D衛(wèi)星在正常模式星敏感器定姿下的姿態(tài)角和姿態(tài)角速度仿真曲線(衛(wèi)星引入了偏流角計(jì)算),左側(cè)主坐標(biāo)縱軸表示滾動、俯仰姿態(tài),右側(cè)次坐標(biāo)縱軸表示偏航姿態(tài)。
從圖2和圖3可知:資源一號02D衛(wèi)星姿態(tài)指向精度優(yōu)于0.002°(3σ),姿態(tài)控制穩(wěn)定度優(yōu)于1×10-4(°)/s(3σ),外部干擾對衛(wèi)星姿態(tài)的影響得到了有效抑制。從以上仿真數(shù)據(jù)分析可以看出:控制分系統(tǒng)性能指標(biāo)優(yōu)于設(shè)計(jì)指標(biāo),本文提出的衛(wèi)星姿態(tài)解耦控制設(shè)計(jì)有效。
圖4和圖5分別為資源一號02D衛(wèi)星在正常模式星敏感器定姿下的姿態(tài)角和姿態(tài)角速度在軌數(shù)據(jù)曲線(衛(wèi)星引入了偏流角計(jì)算),左側(cè)主坐標(biāo)縱軸表示滾動、俯仰姿態(tài),右側(cè)次坐標(biāo)縱軸表示偏航姿態(tài)。

圖2 正常飛行姿態(tài)角仿真曲線Fig.2 Simulation curves of attitude angles in normal flight

圖3 正常飛行姿態(tài)角速度仿真曲線Fig.3 Simulation curves of attitude angular velocities in normal flight

圖4 正常飛行姿態(tài)角在軌曲線Fig.4 On-orbit curves of attitude angles in normal flight
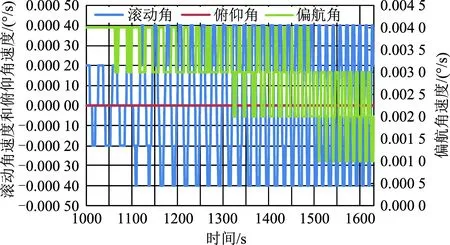
圖5 正常飛行姿態(tài)角速度在軌曲線Fig.5 On-orbit curves of attitude angular velocities in normal flight
從圖4和圖5可知,資源一號02D衛(wèi)星在軌實(shí)現(xiàn)的姿態(tài)控制性能指標(biāo)分別為:姿態(tài)指向精度優(yōu)于0.005°(3σ),姿態(tài)控制穩(wěn)定度優(yōu)于4×10-4(°)/s(3σ)。將圖4和圖2,圖5和圖3進(jìn)行比較,可以看出:本文提出的姿態(tài)解耦控制設(shè)計(jì)在姿態(tài)指向精度和姿態(tài)控制穩(wěn)定度方面,均優(yōu)于衛(wèi)星在軌使用的姿態(tài)解耦控制設(shè)計(jì)。如果能夠通過合理設(shè)計(jì)系統(tǒng)帶寬、有效抑制太陽翼撓性振動對衛(wèi)星姿態(tài)的影響,那么應(yīng)用本文設(shè)計(jì)可以使衛(wèi)星姿態(tài)控制性能指標(biāo)得到進(jìn)一步提升和優(yōu)化。
3 結(jié)束語
本文在低軌遙感衛(wèi)星姿態(tài)動力學(xué)模型的基礎(chǔ)上,運(yùn)用解耦控制設(shè)計(jì)了姿態(tài)控制律,并從頻域分析的角度研究了姿態(tài)控制規(guī)律中控制參數(shù)的選取。由于設(shè)計(jì)合理的系統(tǒng)帶寬既可以隔離衛(wèi)星姿態(tài)外部干擾,又能加快系統(tǒng)的響應(yīng)速度,因此本文給出了確定期望系統(tǒng)帶寬后控制參數(shù)的選取依據(jù),從而可以非常直觀地設(shè)計(jì)控制器來處理不同姿態(tài)控制任務(wù)。本文以資源一號02D衛(wèi)星為研究對象,通過對提出的姿態(tài)解耦控制設(shè)計(jì)進(jìn)行仿真,驗(yàn)證了其可行性和有效性。另外,對仿真數(shù)據(jù)和資源一號02D衛(wèi)星在軌數(shù)據(jù)進(jìn)行比較,結(jié)果表明本文設(shè)計(jì)能夠進(jìn)一步提升、優(yōu)化衛(wèi)星姿態(tài)控制性能指標(biāo),對于低軌遙感衛(wèi)星姿態(tài)控制系統(tǒng)設(shè)計(jì)具有一定的參考價(jià)值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16