一種基于二維碼識別的無人機搬運設計
2021-03-04 22:22:36楊一帆雷晶晶潘曉云董德武
科學與財富 2021年26期
楊一帆 雷晶晶 潘曉云 董德武

摘 要:伴隨著近年來物流倉儲行業逐漸的發展,智能科技技術的進步,搬運無人機在應用科技上有了很大提升,也逐漸得到物流行業的認可。搬運無人機的創新優勢在于可以利用在線編程以及識別二維碼來完成各種預期的運輸任務。在自身結構和性能上具有機器的獨特優勢,尤其體現了機器的智能性和適應性。搬運作業是指用設備握持物品,從一個初始位置移動到另一個指定位置,無人機可以安裝不同的末端執行器和傳感器,以完成各種環境下的物品搬運工作,大大減輕了繁重的體力勞動。
關鍵詞:物流倉儲;二維碼;貨物搬運
引言
當前,城市化不斷推進,居民對于互聯網需求逐漸提高,網購以及外賣需求量暴增,然而,貨物分類以及運輸作業有著極大需求量。本文設計的搬運無人機具有以下幾大創新點:搬運機器人可以有條不紊的運輸物品;利用中央遠程控制平臺進行遠程控制以及航線規劃。運輸總系統可以高效地進行任意站點的運輸航線設計,減少人力勞動浪費;同時搬運無人機可以在作業人員身體不適應或者在有安全隱患的環境下工作;使用搬運無人機可以合理的利用有限的空間面積,獲取更多投資商的目光,確保作業環境的整潔,實現無人化流水線。
1 ?搬運無人機總體結構設計
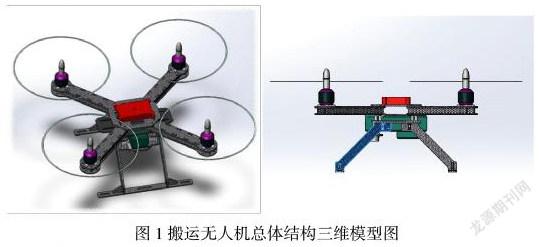
無人機的結構主要部分有;低噪槳葉,無刷電機,云臺相機,航模電池,激光定高,人工智能核心,飛控核心,電調,光流,碳纖機架,減震泡沫。利用無人機的快捷將貨物綁定在無人機支架上,通過無人機的上升動力將貨物帶入空中,然后再通過提前是設定好的地點,讓無人機到達指定位置。
2 搬運無人機的機械結構設計
搬運無人機由碳纖機架、航模電池、激光定高以及云臺相機和減震泡棉等基本結構構成其基本框架,碳纖機架、云臺相機與激光定高之間均采用高強度螺栓連接起來,無人機底盤與機翼也通過特殊材質的螺栓與地基穩固的連接。無人機在其首端可增加一個夾具裝置,既最大化利用了空間,又保證了無人機搬運貨物高效性。在無人機重要承載部位采用鋼碳纖混合材料,形成承重骨架,包括碳纖機架、無刷電機固定端,以及夾具裝置的自身重量,其在搬運無人機在安全方面具有重要研究意義。無人機采用的是無刷電機,其內轉子一般極數少,轉速高,轉矩小,外轉子一般極數多,轉速低,轉矩大,結構緊湊通過給線圈繞組高速的換向供電讓磁鋼持續的轉動,換向采用電子器件,一般常用的MOS 管。一般的三相無刷電機[1]具有三相定子,為了防止轉子被定子鎖住,同一時刻必須以特定的方式按順序為其中的兩相通電,以產生旋轉磁場。依照特定的通電順序一般按照轉子所處的空間位置不同,分為六步。
3 無人機控制系統介紹、數據交換以及避障原理
3.1編程控制系統設計
無人機采用的是語法簡單的Python,其中List[2]是 Python 中使用最頻繁的數據類型。列表可以完成大多數集合類的數據結構實現。它支持字符,數字,字符串甚至可以包含列表。
3.2無人機數據交換原理
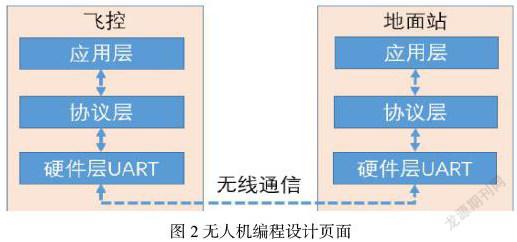
在多旋翼飛行器飛行過程中,為了便于對飛控狀態的監測和控制,需要建立一個遠程的多旋翼飛行器地面站,通信鏈路如圖3。在飛控和工作站的通信鏈路中,硬件層采用 2.4G 無線透傳模塊。通過協議可以保證飛控和工作站的通信速率和高可靠性,將數據按幀傳輸,每一幀數據都表示特殊的含義。利用激光測距[3]的原理是利用光速的傳播遇到物體后返回的時間來測量,當距離比較近,則從發射激光到接收到激光這段時間非常的短,測量設備的數據處理不及時,就出現了設備測量的最小距離極限,一般稱之為測量盲區,高度數據在低于某一個高度之后,高度數據不再變化采用類似原理的超聲傳感器也有同樣的問題,只是超聲傳感器的盲區會相對較小。
3.3無人機自主避障功能原理
無人機飛控姿態的解算需要用到3個傳感器,陀螺儀[4],加速度計,磁力計[5]。一般情況下,通過陀螺儀數據積分就可以得到多旋翼飛行器的姿態,也可以通 過加速度傳感器正交分解得到多旋翼飛行器的姿態,而兩者結合互補則數據更加穩定多旋翼本身傳感器具有一個坐標系,而多旋翼是處于地理坐標系中,所以需要將多旋翼的坐標系同地理坐標系聯系統一起來。雖然我們肉眼能立即發現多旋翼的運動方位,但多旋翼自己并不知道自己相對于地理坐標系的運動關系陀螺儀和加速度計各有優缺點,而且恰好優缺點互補,所以當單一傳感器不滿足要求時,我們將多種傳感器的數據融合,從而保證數據盡可能的更加準確。
4 無人機基本原理及流程
4.1無人機工作原理及流程圖
使用者通過網絡預定,在網上平臺進行下單,在接受所需運輸物品的大小及物品運輸地點后,通過后臺處理調配相應大小的無人機進行物品的運輸。使用者只需要下訂單,在預定位置接受貨物即可。無人機通過對地形的掃描,與后臺記錄的地圖數據相比較,這樣,使得無人機能夠精準的將貨物送至客戶手中。無人機后臺通過對用戶與商家的溝通以及對無人機的地圖存儲的擴展來達到物品的運輸。無人機的動力大小影響著無人機可運輸物品的大小,動力充足的無人機有著更高的效率。對于天氣因素影響無人機的運輸,在惡劣天氣的情況下無人機服務會暫停,從而保證客戶物品的安全。
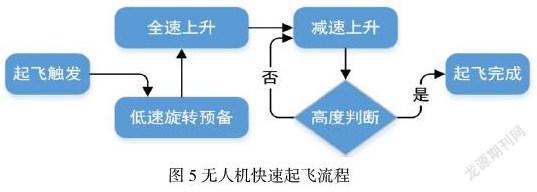
4.2無人機一鍵起飛、降落原理
一鍵起飛分為全速上升,減速上升,高度保持三個階段。在起飛的第一階段,必須要快速上升的否則可能導致飛機起飛失敗嚴重可能會炸機,第二階段當起飛后接近目標高低需要減速上升,第三階段是在目標高度附近維持懸停。一鍵起飛需要在定點模式下使用,如果沒有在定點模式則需要飛手有較高的實踐飛行經驗,否則可能會導致起飛后飛機四處飄飛,從而使飛機炸雞,嚴重可能導致事故。
5 降落原理
針對搬運物件重復工作量大、繁瑣的問題,本文研究了一款可掃描二維碼的無人機搬運,其主要由氣壓、激光傳感器進行環境感知,配備有專門APP進行實時信息反饋,實現了人機互動的目的,確保貨物準確達到目的地。無人機通過對地形的掃描,與后臺記錄的地圖數據相比較,這樣,使得無人機能夠精準的將貨物送至客戶手中。無人機后臺通過對用戶與商家的溝通以及對無人機的地圖存儲的擴展來達到物品的運輸。高效有序,本設計可以進行多無人機配合作業,減少了人工重復勞動力。
參考文獻:
[1]梁偉健.一種高效三相直流無刷電機驅動方法探討[J].2020年中國家用電器技術大會論文集《電器》雜志社會議論文集;2020(10)
[2]李俊銘.基于機器學習的數控自動編程技術研究與系統開發[J].廣州大學 廣東省
[3]樊里略,阮清,強陳佳.卷積神經網絡的脈沖激光測距回波估計方法.激光雜志. 2021,42(07)
[4]呂騫,丁徐鍇,陳鶴,賈佳,李宏生. 微半球諧振陀螺儀的模態主軸方位角測算方法[D].傳感器與微系統. 2021,40(09)
[5] 陳海峰,馮春霖,應國德,高群,曹杰,崔粲. 基于無線輸電的小型無人機位置控制研究[J]. 環境科學, 控制工程. 2021,28(07)
作者簡介:
楊一帆,男,武漢商學院機器人工程專業學生,研究方向:智能機器人設計。
潘曉云,女,武漢商學院機器人工程專業學生,研究方向:工業機器人系統集成;
董德武,男,武漢商學院機器人工程專業學生,研究方向:機器人控制,智能機器人設計。
通訊作者: 雷晶晶(1990-),女,湖北武漢人,碩士,武漢商學院教師,工程師;主要研究方向:大學生創新創業教育。
基金項目: 大學生創新創業項目,項目號202111654003, 名稱:病菌滅霸—新型智能消毒機器人。