基于視覺(jué)/慣導(dǎo)的無(wú)人機(jī)組合導(dǎo)航算法研究
2021-03-04 13:39:58黃劍雄劉小雄章衛(wèi)國(guó)高鵬程
計(jì)算機(jī)測(cè)量與控制 2021年2期
關(guān)鍵詞:信息
黃劍雄,劉小雄,章衛(wèi)國(guó),高鵬程
(西北工業(yè)大學(xué) 自動(dòng)化學(xué)院, 西安 710072)
0 引言
傳統(tǒng)的無(wú)人機(jī)通常采用全球定位系統(tǒng)(GPS,global position system)與慣性測(cè)量單元(IMU,inertial measurement unit)進(jìn)行融合[1],為無(wú)人機(jī)提供所需的姿態(tài)、速度以及位置等導(dǎo)航信息。
當(dāng)GPS受遮擋或完全無(wú)信號(hào)時(shí),這將直接影響到使用GPS與IMU的傳統(tǒng)組合導(dǎo)航算法,嚴(yán)重的情況下,甚至?xí)蛊渫耆В瑥亩l(fā)無(wú)人機(jī)墜機(jī)的事故。
針對(duì)上述問(wèn)題,許多學(xué)者將研究重點(diǎn)轉(zhuǎn)向了同時(shí)定位與地圖構(gòu)建(SLAM,simultaneous localization and mapping)的研究,并提出了許多優(yōu)秀的開源算法。其中利用視覺(jué)傳感器的SLAM算法,主要分為基于特征點(diǎn)法的SLAM算法,如PTAM[2]、ORB_SLAM[3],與基于直接法或半直接法的SLAM算法,如DSO[4]、SVO[5]等算法。其中,ORB_SLAM是基于特征點(diǎn)法的SLAM算法中性能非常優(yōu)越的算法,并且于2017年推出了同時(shí)支持單目、雙目、RGBD的ORB_SLAM2[6]。
但由于無(wú)人機(jī)的機(jī)載處理器性能較弱,如在NVIDIA JETSON TX2平臺(tái)上,ORB_SLAM2經(jīng)過(guò)GPU加速等優(yōu)化后,通常也只能輸出10~20 Hz的位姿信息。這對(duì)于無(wú)人機(jī)的導(dǎo)航而言,確實(shí)有些捉襟見肘。因此,利用誤差狀態(tài)卡爾曼濾波(ErKF,error-state kalmanfilter)松耦合方法[7]對(duì)視覺(jué)位姿與慣導(dǎo)信息進(jìn)行融合從而提升導(dǎo)航信息的輸出頻率是非常有效的手段之一。
在傳統(tǒng)的使用擴(kuò)展卡爾曼濾波(EKF,extended kalmanfilter)對(duì)GPS信息與慣性信息進(jìn)行融合的流程中,建模的準(zhǔn)確與否直接影響到EKF的精確性。為了解決系統(tǒng)建模不準(zhǔn)確的問(wèn)題,自適應(yīng)漸消卡爾曼濾波(AFKF,adaptive fading kalman filter)應(yīng)運(yùn)而生。AFKF主要通過(guò)實(shí)時(shí)的計(jì)算遺忘因子,不斷調(diào)整系統(tǒng)的協(xié)方差矩陣,從而削弱歷史數(shù)據(jù)的權(quán)重,即限制了模型誤差累積。國(guó)內(nèi)外學(xué)者在傳統(tǒng)AFKF方面做了許多研究工作,其中,AFKF直接對(duì)協(xié)方差陣進(jìn)行加權(quán)漸消處理的合理性已得到了完備的證明[8];學(xué)者也提出了非常合理的最佳遺忘因子的求取算法[9]。
基于上述文獻(xiàn)的研究成果,本文提出了使用AFKF作為視覺(jué)位姿與慣導(dǎo)信息的融合算法,進(jìn)一步提升濾波結(jié)果的精度。在此基礎(chǔ)上,本文還討論了一種由于視覺(jué)SLAM解算過(guò)程而引入的視覺(jué)位姿信息相對(duì)慣性信息滯后的問(wèn)題,并提出了一種延時(shí)補(bǔ)償方法以解決這類滯后問(wèn)題,進(jìn)一步改善導(dǎo)航解算精度。
1 ORB_SLAM2簡(jiǎn)介及其簡(jiǎn)化工作
ORB_SLAM2是當(dāng)前基于特征點(diǎn)法的主流SLAM算法之一,前端是一個(gè)輕量級(jí)的定位模型,后端主要采用BA優(yōu)化方法,可以實(shí)現(xiàn)未知環(huán)境中的定位。ORB_SLAM2在原ORB_SLAM的基礎(chǔ)上,新增了對(duì)雙目以及RGB-D攝像頭的支持,并可以實(shí)現(xiàn)地圖重用、回環(huán)檢測(cè)以及重定位等功能。
ORB_SLAM2一共包含3個(gè)主要線程以及一個(gè)次要線程,分別是Tracking線程、Local Mapping線程、Loop Closure線程及全局BA線程,其中全局BA線程僅發(fā)生在回環(huán)檢測(cè)成功后才執(zhí)行。
本文為了保證實(shí)時(shí)性要求,對(duì)ORB_SLAM2框架進(jìn)行了一定程度的簡(jiǎn)化,簡(jiǎn)化包括去除閉環(huán)檢測(cè)以及回環(huán)修正的線程;同時(shí),為了與慣導(dǎo)進(jìn)行融合,增加了Scheduler線程,Scheduler中主要完成IMU數(shù)據(jù)的采集以及基于EKF框架的視覺(jué)慣導(dǎo)融合。如圖1所示。

圖1 簡(jiǎn)化ORB_SLAM2流程框圖
本文暫且把修改后的框架稱為簡(jiǎn)化ORB_SLAM2,簡(jiǎn)化ORB_SLAM2共包含3個(gè)線程,分別是Tracking線程、Local Mapping線程、Scheduler線程。
在Scheduler線程中,本文將ORB_SLAM2與IMU視為相互獨(dú)立的傳感器,按設(shè)定頻率進(jìn)行數(shù)據(jù)采集與處理,并基于EKF框架進(jìn)行融合,得到融合后的無(wú)人機(jī)位置、速度以及姿態(tài)信息,作為無(wú)人機(jī)的導(dǎo)航信息。
2 基于EKF的視覺(jué)慣導(dǎo)組合導(dǎo)航算法
2.1 EKF預(yù)測(cè)更新
假設(shè)系統(tǒng)狀態(tài)為[q,v,p,εr,▽r]T,其中q表示無(wú)人機(jī)姿態(tài),v表示無(wú)人機(jī)速度,p表示無(wú)人機(jī)位置,εr表示角速度bias,▽r表示加速度bias。
將陀螺儀誤差與加速度計(jì)誤差建模為一階馬爾科夫隨機(jī)過(guò)程,可以將陀螺儀誤差模型建模如下:

(1)
加計(jì)誤差模型建模如下:

(2)
根據(jù)運(yùn)動(dòng)學(xué)關(guān)系,式(1)以及式(2),可得如下運(yùn)動(dòng)學(xué)狀態(tài)方程:

(3)
其中:

(4)
其中:ωm表示陀螺儀量測(cè)值,am表示加速度計(jì)量測(cè)值。
上述運(yùn)動(dòng)狀態(tài)方程中,含有噪聲項(xiàng),這是我們無(wú)法在實(shí)際測(cè)量中直接去除的,因此我們需要將這些噪聲項(xiàng)通過(guò)EKF估計(jì)出來(lái)之后再進(jìn)行消除。我們首先將上述運(yùn)動(dòng)方程中的噪聲項(xiàng)去除,然后對(duì)噪聲項(xiàng)進(jìn)行建模,得到我們最終的誤差狀態(tài)方程:
(5)
由式(1)和式(2)描述的IMU誤差模型可知,如果我們將噪聲項(xiàng)消除,則IMU誤差應(yīng)該恒為0,則其倒數(shù)也為0,因此可以得到如上消除噪聲項(xiàng)后的運(yùn)動(dòng)方程,我們對(duì)每一個(gè)狀態(tài)量求取上述兩組運(yùn)動(dòng)方程的誤差,則可以得到我們最終的狀態(tài)量為[δθ,δv,δp,εr,▽r]T的誤差狀態(tài)方程如下:

(6)
對(duì)各狀態(tài)量求偏導(dǎo),可得如下預(yù)測(cè)模型的狀態(tài)空間方程:

(7)
其具體表達(dá)形式為:
(8)
因?yàn)闄C(jī)載處理器只能以離散化的計(jì)算形式對(duì)導(dǎo)航數(shù)據(jù)進(jìn)行處理,因此需要將式(7)進(jìn)行離散化處理。具體離散化流程可參考文獻(xiàn)[10],本文采用泰勒展開的方式,并且僅取二階項(xiàng),如式(9)所示:
(9)
其中:Φk+1,k=Φ(tk+1,tk),F(xiàn)k=F(tk),T=tk+1-tk。根據(jù)系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣Φ以及噪聲矩陣G,可以求得系統(tǒng)的噪聲協(xié)方差矩陣Qk的離散化形式,如式(10):

(10)
其中:Qc為系統(tǒng)噪聲的協(xié)方差矩陣,利用式(9),式(10)求得的狀態(tài)轉(zhuǎn)移矩陣與離散過(guò)程噪聲協(xié)方差矩陣,則可計(jì)算k+1時(shí)刻的狀態(tài)協(xié)方差矩陣:
(11)
以及完成狀態(tài)量的預(yù)測(cè)過(guò)程:
(12)
2.2 EKF量測(cè)更新
量測(cè)更新采用視覺(jué)SLAM解算的位姿信息,由于視覺(jué)輸出位姿信息是離散形式的,因此本文的量測(cè)方程可以直接離散化形式表示為:
Zk+1=Hk+1Xk+1+Vk+1
(13)
其中:
(14)
其中:[Xn,Yn,Zn]T為轉(zhuǎn)換到本文所定義的導(dǎo)航坐標(biāo)系下的軌跡對(duì)應(yīng)的三維坐標(biāo)值。
根據(jù)視覺(jué)SLAM的特性,量測(cè)噪聲Vk+1可以表示為:
(15)
其中:np∈R3×1為位置量測(cè)值所含白噪聲,nθ∈R3×1為姿態(tài)量測(cè)值所含白噪聲。
不難知道:
(16)
則有:
(17)

(18)
同理可得:
(19)
根據(jù)上述量測(cè)更新模型,可以計(jì)算k+1時(shí)刻的增益矩陣:
(20)
進(jìn)一步可以更新k+1時(shí)刻的狀態(tài)協(xié)方差矩陣:
Pk+1=(I-Kk+1Hk+1)Pk+1,k(I-Kk+1Hk+1)T+Kk+1RKk+1
(21)
并完成對(duì)系統(tǒng)狀態(tài)量的更新:
(22)
3 自適應(yīng)漸消卡爾曼濾波
由于在建立EKF的系統(tǒng)模型的過(guò)程中,通常會(huì)對(duì)其在合理的范圍內(nèi)進(jìn)行近似或簡(jiǎn)化,以提高解算效率,但這些簡(jiǎn)化把不可避免的會(huì)使EKF的估計(jì)誤差不斷增大,甚至嚴(yán)重影響濾波效果。因此,本文采用了自適應(yīng)卡爾曼濾波的方式來(lái)進(jìn)一步提高視覺(jué)慣導(dǎo)融合的精度。
3.1 基本原理
為了減小在建模時(shí)由于模型近似或簡(jiǎn)化帶來(lái)的估計(jì)誤差,可以在時(shí)間更新中求取當(dāng)前時(shí)刻狀態(tài)預(yù)測(cè)協(xié)方差矩陣時(shí),乘上相應(yīng)的遺忘因子[12],即:
(23)
其余更新流程與式(12),式(20)~(22)一致,通過(guò)分析可知,當(dāng)估計(jì)誤差增大時(shí),會(huì)導(dǎo)致遺忘因子λk+1增大,從而狀態(tài)預(yù)測(cè)協(xié)方差矩陣Pk+1,k也會(huì)相應(yīng)增大,Pk+1,k增大會(huì)使增益Kk+1增大,因此在計(jì)算經(jīng)過(guò)量測(cè)更新得到的當(dāng)前狀態(tài)預(yù)測(cè)值時(shí),會(huì)更多的信任量測(cè)信息,從而抑制歷史狀態(tài)信息帶來(lái)的影響,即可減小由于建模時(shí)模型近似或簡(jiǎn)化帶來(lái)的估計(jì)誤差。從λk+1的物理意義可知,通常有:
λk+1≥1
(24)
3.2 遺忘因子的求取方式
由于通過(guò)求取最優(yōu)的遺忘因子,應(yīng)當(dāng)使自適應(yīng)漸消卡爾曼濾波成為最優(yōu)濾波器,因此遺忘因子在求取過(guò)程中,首先應(yīng)該滿足最優(yōu)濾波器的性質(zhì)。由文獻(xiàn)[9]可知,最終可將最優(yōu)濾波器的性質(zhì)轉(zhuǎn)化為如下等價(jià)條件:
(25)
其中:C0k為殘差的協(xié)方差,如下:
(26)
其中:zk為殘差,是一個(gè)白噪聲序列:
zk=Zk-HkXk
(27)
通過(guò)聯(lián)立式(25)與式(20),可以將式(25)展開得到:
(28)
假設(shè)Qk,Rk,P0均正定,且Hk滿秩,則將式(28)化簡(jiǎn)并將式(23)代入,可展開得到:
λkMk=Nk
(29)
其中:
(30)
(31)
其中:C0k由實(shí)際數(shù)據(jù)計(jì)算得到,而并非式(26)所示的理想化表達(dá)式得到,則最佳遺忘因子計(jì)算方法如下:
λk=max{1,tr(Nk)/tr(Mk)}
(32)
4 視覺(jué)信息滯后的補(bǔ)償方法
4.1 問(wèn)題描述
通過(guò)AFKF的方法,能夠得到精確的無(wú)人機(jī)姿態(tài)、速度以及位置信息。但由于實(shí)時(shí)的視覺(jué)SLAM求解位姿的過(guò)程根據(jù)具體運(yùn)算平臺(tái)以及算法的不同,往往需要30~200 ms甚至更長(zhǎng)的運(yùn)算時(shí)間,這將會(huì)導(dǎo)致視覺(jué)位姿信息滯后于慣導(dǎo)信息。

圖2 延時(shí)示意圖
如圖2所示,由于視覺(jué)SLAM求解位姿需要一定的處理時(shí)間,通常,在t1時(shí)刻獲得的圖像信息,要在t2時(shí)刻才能求解出相應(yīng)的SLAM位姿結(jié)果,并傳遞到組合導(dǎo)航流程與慣性信息融合,t2時(shí)刻獲得的圖像信息同理,要在t3時(shí)刻才能夠解算出相應(yīng)的位姿結(jié)果,這不可避免的導(dǎo)致了視覺(jué)位姿滯后于慣導(dǎo)信息,即在t3時(shí)刻對(duì)視覺(jué)位姿以及慣性信息進(jìn)行融合時(shí),視覺(jué)位姿缺失了t2時(shí)刻至t3時(shí)刻的運(yùn)動(dòng)信息。因此,我們需要對(duì)視覺(jué)位姿進(jìn)行補(bǔ)償,以減緩甚至消除這類延時(shí)對(duì)系統(tǒng)帶來(lái)的影響。
通常在簡(jiǎn)化ORB_SLAM2實(shí)時(shí)運(yùn)行時(shí):
t2-t1≠t3-t2
(33)
也可以理解為,通常連續(xù)兩組位姿之間的慣導(dǎo)數(shù)據(jù)的數(shù)量并不相同,即:
m≠n
(34)
如圖2所示,假設(shè)IMU采樣周期為T,則有:
(35)
本文著重針對(duì)圖2中,t2至t3時(shí)刻的延時(shí)處理做詳細(xì)說(shuō)明,其余時(shí)刻同理。
4.2 補(bǔ)償姿態(tài)延時(shí)
由于視覺(jué)位姿的姿態(tài)信息包含了從初始參考幀一直到t2時(shí)刻的姿態(tài)信息,因此,只需要補(bǔ)償t3時(shí)刻相對(duì)于t2時(shí)刻的旋轉(zhuǎn)量即可。可令t2時(shí)刻為參考時(shí)刻,即t2時(shí)刻對(duì)應(yīng)的旋轉(zhuǎn)四元數(shù)為單位四元數(shù)[1,0,0,0]T。

Φt2 + T=ωt2 + TbT= [Δθx,Δθy,Δθz]T|t2 + T
(36)
t2+T時(shí)刻的四元數(shù)增量為:
qt2 + T(t) =
(37)
進(jìn)而可得到,t2+T時(shí)刻對(duì)應(yīng)的旋轉(zhuǎn)四元數(shù)為:
Q(t2+T)=Q(t2)?qt2+T(t)
(38)
經(jīng)過(guò)k次迭代后,可以得到表示由t2時(shí)刻到t3時(shí)刻,機(jī)體坐標(biāo)系旋轉(zhuǎn)量的四元數(shù)Q(t3)。

(39)
進(jìn)而通過(guò)旋轉(zhuǎn)矩陣與歐拉角間的轉(zhuǎn)換關(guān)系[11],可求出t3時(shí)刻對(duì)應(yīng)的真實(shí)姿態(tài)角,從而完成姿態(tài)延時(shí)的補(bǔ)償。
4.3 補(bǔ)償位置延時(shí)
由于視覺(jué)位姿的姿態(tài)信息包含了從初始參考幀一直到t2時(shí)刻的位置信息,因此,只需要補(bǔ)償t3時(shí)刻相對(duì)于t2時(shí)刻的平移量即可,也即是,認(rèn)為t2時(shí)刻為參考時(shí)刻,即t2時(shí)刻對(duì)應(yīng)的相對(duì)位置為:
pt2=[0,0,0]T
(40)
其對(duì)應(yīng)的初始速度可以由組合導(dǎo)航算法在t2時(shí)刻輸出的速度量得到,則t2時(shí)刻對(duì)應(yīng)的速度為:
vt2= [vx,vy,vz]T|t2
(41)
假設(shè)t2+T時(shí)刻IMU采集到的機(jī)體坐標(biāo)系下的原始加速度值為:
at2 + T= [ax,ay,az]T|t2 + T
(42)
則通過(guò)運(yùn)動(dòng)學(xué)公式,可以得到t2+T時(shí)刻對(duì)應(yīng)的速度為:
vt2+T=vt2+at2+TT
(43)
同理,通過(guò)運(yùn)動(dòng)學(xué)公式,可以得到t2+T對(duì)應(yīng)的相對(duì)位置為:
(44)
經(jīng)過(guò)k次迭代,最終可以得到B_坐標(biāo)系相對(duì)于B坐標(biāo)系在導(dǎo)航坐標(biāo)系下的相對(duì)位移:
pt3= [px,py,pz]T|t3
(45)
由于在時(shí)刻t3傳入組合導(dǎo)航系統(tǒng)的視覺(jué)位置量測(cè)信息,表示的是B坐標(biāo)系在導(dǎo)航坐標(biāo)系下的位置信息Pt2,則t3時(shí)刻對(duì)應(yīng)的真實(shí)位置信息應(yīng)該為:
Pt3=Pt2+pt3
(46)
5 實(shí)驗(yàn)結(jié)果分析
本文將采用EuRoC數(shù)據(jù)集中的V2_02_medium序列來(lái)對(duì)本文算法進(jìn)行驗(yàn)證,首先是基于該序列驗(yàn)證本文的AFKF算法,由此分析AFKF的相對(duì)于傳統(tǒng)EKF在視覺(jué)慣導(dǎo)組合導(dǎo)航中的優(yōu)越性;其次,本文將基于簡(jiǎn)化ORB_SLAM2從V2_02_medium序列解算得到的視覺(jué)位姿信息,人工模擬200 ms的延時(shí),并采用本文的延時(shí)補(bǔ)償方法對(duì)延時(shí)進(jìn)行處理,并分析本文算法的有效性。
5.1 AFKF仿真結(jié)果
本文首先基于簡(jiǎn)化ORB_SLAM2對(duì)V2_02_medium圖像序列進(jìn)行視覺(jué)位姿解算,得到相應(yīng)的視覺(jué)位姿,并在數(shù)學(xué)仿真平臺(tái)上完成視覺(jué)位姿與V2_02_medium序列中相應(yīng)的慣導(dǎo)數(shù)據(jù)進(jìn)行坐標(biāo)系統(tǒng)一,最終對(duì)得到的數(shù)據(jù)分別通過(guò)傳統(tǒng)EKF算法與AFKF算法進(jìn)行導(dǎo)航解算,并作相應(yīng)比較,初始化數(shù)據(jù)如下所示:
P=diag([(0.5*pi/180)2,(0.5*pi/180)2,
(0.5*pi/180)2,(0.5)2,(0.5)2,(0.5)2,
(0.4)2,(0.4)2,(0.4)2,(0.5*pi/180/3600)2,
(0.5*pi/180/3600)2,(0.5*pi/180/3600)2,
(5E-4)2,(5E-4)2,(5E-4)2])
(47)
q=diag([(2*pi/180)2,(2*pi/180)2,
(2*pi/180)2,(5E-3)2,(5E-3)2,
(5E-3)2,(5E-2)2,(5E-2)2,
(5E-2)2,(0.5*pi/180)2,
(0.5*pi/180)2,(0.5*pi/180)2,
(5E-3)2,(5E-3)2,(5E-3)2])
(48)
R=diag([(0.5*pi/180)2,(0.5*pi/180)2,
(0.5*pi/180)2,(0.5)2,(0.5)2,(0.5)2])
(49)
通過(guò)仿真可以得到姿態(tài)曲線,以及與姿態(tài)真值之間姿態(tài)誤差曲線,如圖3和圖4所示。

圖3 EKF、AFKF姿態(tài)曲線

圖4 EKF、AFKF與真值的姿態(tài)誤差曲線
如圖3和圖4所示,傳統(tǒng)EKF方法與AFKF方法,均能較好地跟蹤姿態(tài)真值,其誤差在5°以內(nèi),并且,AFKF相對(duì)于傳統(tǒng)EKF而言,在一定程度上可以降低姿態(tài)誤差,以獲得更高精度的姿態(tài)解算值。
速度曲線,以及與速度真值之間的速度誤差曲線分別如圖5和圖6所示。相對(duì)于傳統(tǒng)EKF而言,通過(guò)AFKF可以有效降低與真值之間的速度誤差,并誤差在0.2 m/s以內(nèi),相對(duì)于傳統(tǒng)EKF算法,性能提升了約30%左右。

圖5 EKF、AFKF速度曲線

圖6 EKF、AFKF與真值的速度誤差曲線
位置曲線,以及與位置真值之間的位置誤差曲線分別如圖7~圖8所示。通過(guò)AFKF方法,可以使通過(guò)組合導(dǎo)航解算得到的位置、速度以及姿態(tài)信息的精度進(jìn)一步提高,從而提高濾波器性能。
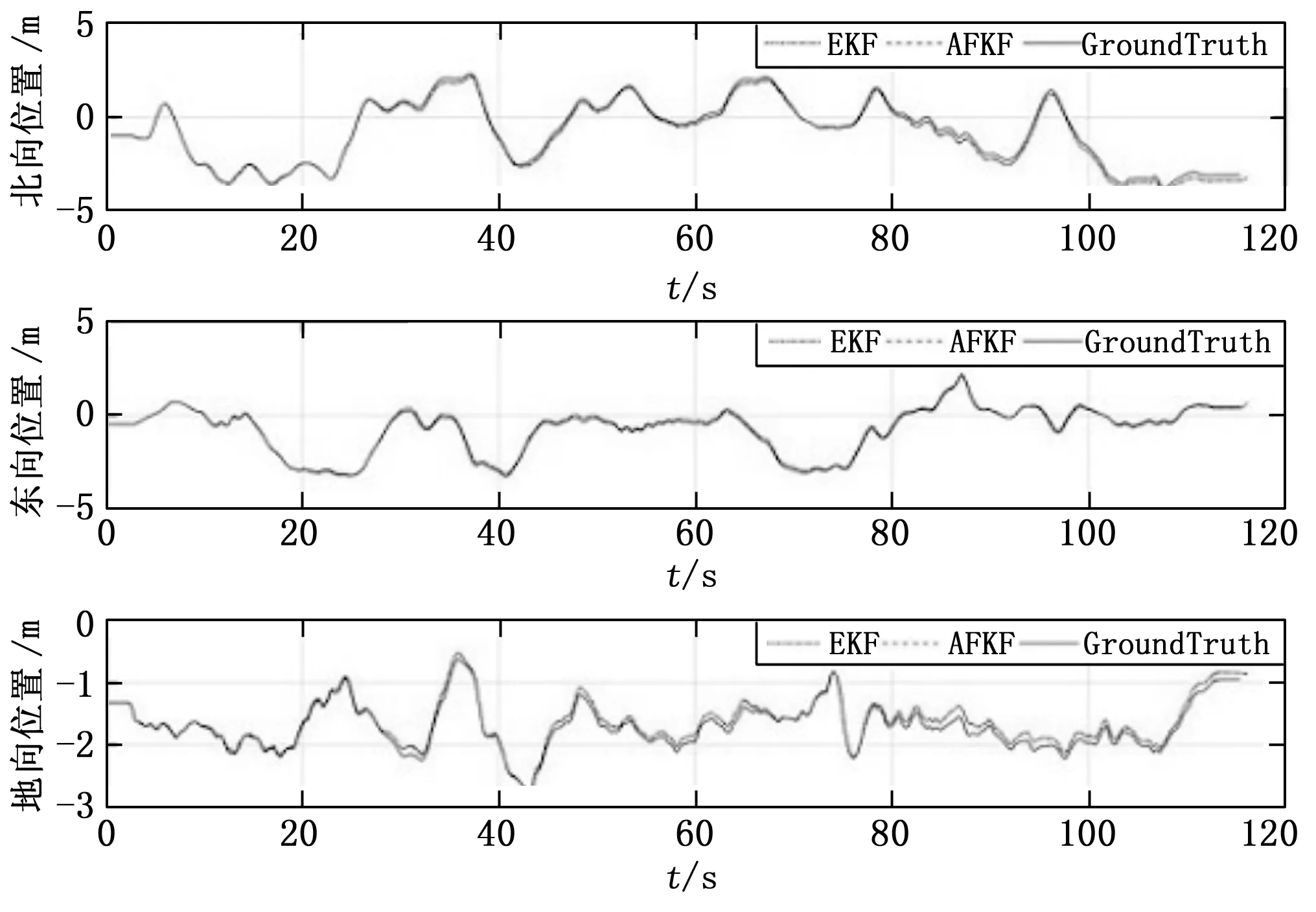
圖7 EKF、AFKF位置曲線

圖8 EKF、AFKF與真值的位置誤差曲線
5.2 延時(shí)補(bǔ)償仿真結(jié)果
本小節(jié)在前一小節(jié)的基礎(chǔ)上,對(duì)得到的視覺(jué)位姿人工添加了相對(duì)于V2_02_medium序列中慣導(dǎo)信息的200 ms的滯后,并在數(shù)學(xué)仿真平臺(tái)上分別采用了未加延時(shí)補(bǔ)償?shù)腁FKF算法與添加了延時(shí)補(bǔ)償?shù)腁FKF進(jìn)行了數(shù)據(jù)融合,本小節(jié)的仿真初始化數(shù)據(jù)與式(47)~(49)一致。
圖9,10分別為姿態(tài)曲線,以及未采用延時(shí)補(bǔ)償方法和采用延時(shí)補(bǔ)償方法時(shí),通過(guò)AFKF得到的姿態(tài)與真值之間的姿態(tài)誤差曲線。
如圖9和圖10所示,采用本文的延時(shí)補(bǔ)償方法后,不僅顯著地降低了姿態(tài)誤差,使跟蹤性能得到了非常大的提升,并且始終將姿態(tài)誤差維持在5°以內(nèi),基本與未加入200 ms人工延時(shí)的估計(jì)精度一致。
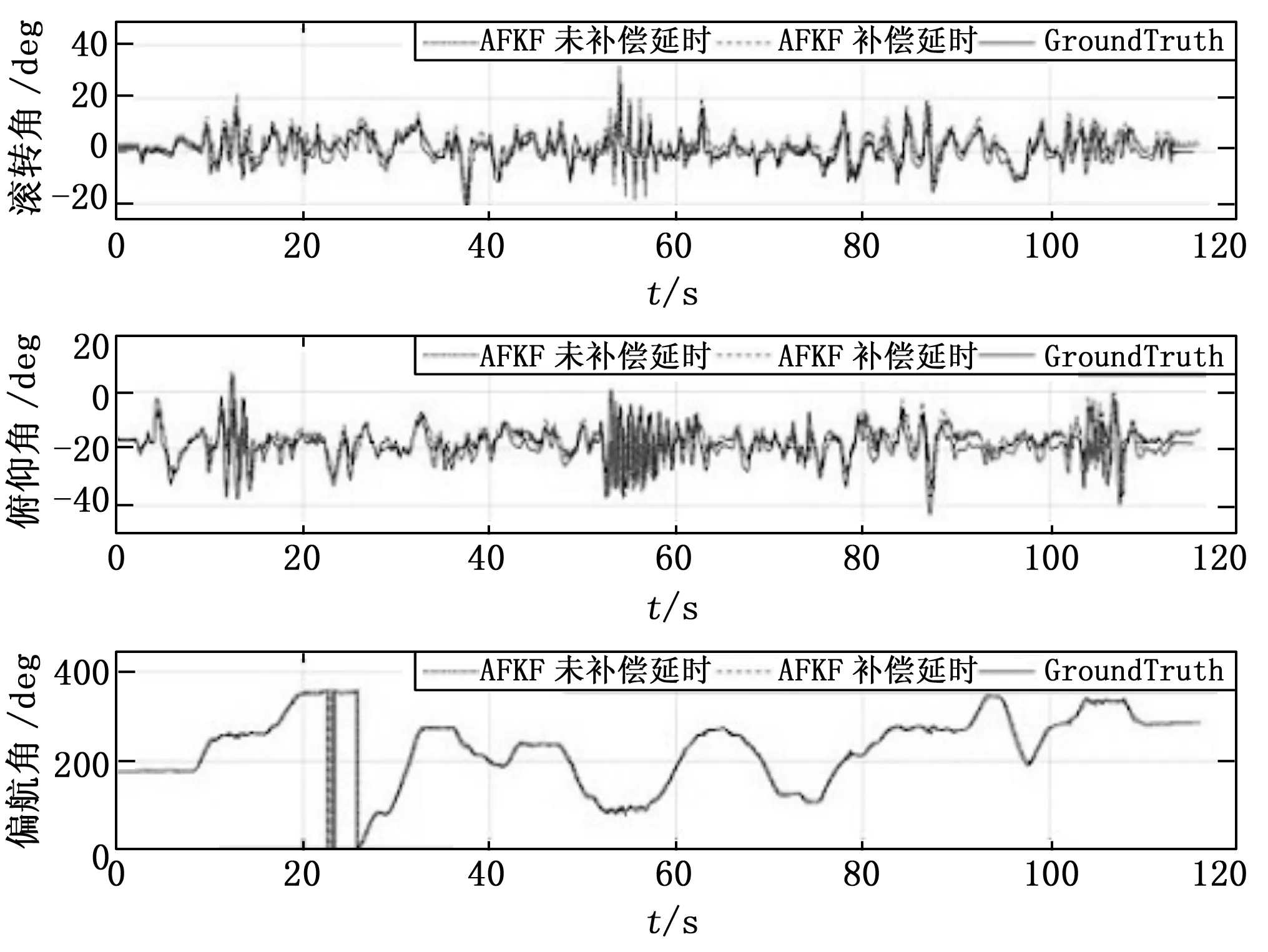
圖9 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF姿態(tài)曲線

圖10 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF姿態(tài)與真值的姿態(tài)誤差曲線
圖11~12分別為速度曲線,以及未采用延時(shí)補(bǔ)償方法和采用延時(shí)補(bǔ)償方法時(shí),通過(guò)AFKF得到的姿態(tài)與真值之間的速度誤差曲線。
如圖11和圖12所示,通過(guò)本文的延時(shí)補(bǔ)償方法,速度誤差顯著降低,有效緩解了人工延時(shí)帶來(lái)的誤差,相對(duì)于未采用延時(shí)補(bǔ)償?shù)那闆r,對(duì)真值的跟蹤更加精確。

圖11 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF速度曲線

圖12 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF速度與真值的速度誤差曲線
圖13和圖14分別為位置曲線,以及未采用延時(shí)補(bǔ)償方法和采用延時(shí)補(bǔ)償方法時(shí),通過(guò)AFKF得到的姿態(tài)與真值之間的位置誤差曲線。
如圖13和圖14所示,采用本文的延時(shí)補(bǔ)償方法后,有效地降低了由人工延時(shí)帶來(lái)的位置誤差,并且基本維持了未加入人工延時(shí)時(shí)的位置解算精度,誤差維持在0.4 m內(nèi)。

圖13 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF位置曲線

圖14 采用與未采用延時(shí)補(bǔ)償?shù)腁FKF位置與真值的位置誤差曲線
6 結(jié)束語(yǔ)
通過(guò)實(shí)驗(yàn)證明,本文的算法通過(guò)引入自適應(yīng)算法與延時(shí)補(bǔ)償算法,有效提高組合導(dǎo)航系統(tǒng)的解算精度,提高濾波器性能,能夠在保證視覺(jué)位姿解算精度的前提下,得到200 Hz的導(dǎo)航解算結(jié)果,非常適合無(wú)人機(jī)等需要高頻率導(dǎo)航信息,且硬件算力有限的平臺(tái)[13-14]。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32