掃路機自主智能駕駛技術研究與應用
2021-03-04 03:16:02福建龍馬環衛裝備股份有限公司環境產業研究院黃秋芳
專用汽車 2021年2期
福建龍馬環衛裝備股份有限公司環境產業研究院 黃秋芳
隨著經濟社會不斷發展,環衛行業經歷了從人力化向機械化的變革,機械化清掃率逐年提升,但背后也一直伴隨著若干個方面的行業難題和痛點。首先,勞動力短缺、人力老化問題。由于環衛工作環境惡劣,勞動強度較大,行業很難招到專業技術人才,從事人力清掃工作的普遍都是高齡人士,從事機械清掃工作的學歷又普遍偏低。其次,人員設備安全問題十分突出。環衛工人作業環境惡劣,導致無法長期保持身體健康,而且工人在作業過程中交通事故也時有發生。再次,傳統環衛運營模式因缺乏統一的智能管理平臺手段,無法科學高效進行實時作業監管,作業效率低下。最后,從業人員人力成本、管理成本在逐年升高,導致整體環衛運營成本也在持續升高。針對這些行業難題,無人駕駛的自主機械化清掃是目前最有效的解決方案,根據環衛運營項目的運營成本測算得出,采用無人駕駛環衛清掃方案預計可以為環衛項目節省60%以上的人力成本,進而節約40%以上的總成本,同步解決環衛工人招聘難、管理難的問題。
無人駕駛作為當前的商業熱點話題,有很多應用場景正在被開發,但環衛領域將作為最快實施落地的賽道之一。無人駕駛在乘用車和物流貨運領域面臨的是開放式環境,要應對很多極端環境,需要積累大量的經驗和數據。而現階段無人駕駛在環衛領域的應用場景更多是封閉式環境,不需要積累很多的數據和測試,就能夠有效替換繁瑣、辛苦的環衛工作,具有商業和社會雙重價值。
在社會價值方面,無人駕駛可以有效地提升清潔車輛的利用率,全程人工智能控制,可以讓清掃更加規范,也能夠覆蓋不適合人工操作的時間段和環境,提升清掃的效率。在經濟方面,無人駕駛環衛車預計不到兩年即可收回一輛車的軟硬件成本。從趨勢上看,人工成本必然持續提高,而無人駕駛的軟硬件成本則將隨著產業高速發展而大幅下降。在技術成熟度方面,無人駕駛環衛車工作速度很低,運營時間多為晚上、凌晨或者非高峰時段,因此更容易做到安全、可靠。有限且相對固定的路線,能夠進一步降低作業過程意外出現的概率,如果采用集中運行的方式也更加方便集中監控、調度和異常處理。
因此,解決面向環衛行業清潔自動化、智能化的技術難題,研制開發適用于室內外復雜大環境清掃作業的新一代無人駕駛自主智能清潔車,實現智能化環保清掃作業車的示范應用和推廣,是行業技術發展的重點戰略方向。本文將面向交通行業和物流行業的智能化和自動化,研究自主智能駕駛汽車在環衛領域暨純電動掃路機工作場景的應用。
掃路機自主智能駕駛框架
掃路機自主智能駕駛系統的硬件架構主要采用激光雷達作為主要感知傳感器,同時結合攝像頭、GPS/IMU、毫米波雷達、超聲波雷達等[1],以NVIDIA Jetson TX2作為主要計算平臺,在域控制工控機上運行各種算法模塊,通過線控技術控制車輛行駛。軟件架構主要涉及自動駕駛環境感知融合技術、自動導航定位技術以及智能路徑規劃等技術的研發。即通過多種車載傳感器來識別掃路機所處的周邊環境狀態,并根據所獲得的環境信息(包括道路信息、交通信息、車輛位置和障礙物信息等)自主做出分析和判斷,從而自主地控制車輛運動,實現掃路機的自主智能駕駛清潔工作。掃路機自主
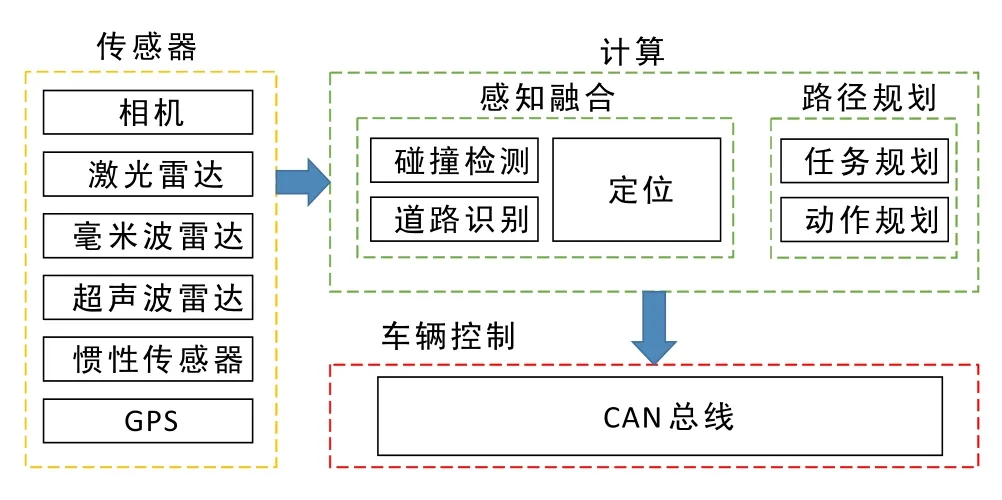
圖1 掃路機自主智能駕駛框架
掃路機自主智能駕駛技術路線
自主智能駕駛掃路機集成激光雷達、GNSS定位系統、慣性導航系統、攝像頭、毫米波雷達、超聲波雷達、工控機等,通過上下位機及云端控制系統實現掃路機的自主智能駕駛,主要技術路線如圖2所示。涉及多傳感器信息融合技術、地圖創建與實時定位技術、不確定環境下的智能路徑規劃技術、智能垃圾識別控制技術等自動駕駛技術[2]。
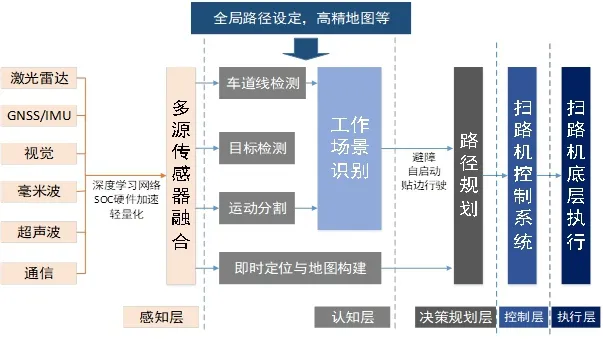
圖2 掃路機自主智能駕駛系統技術路線
1.自動環境感知融合技術
自動駕駛掃路機在非結構化動態環境中,通過多源傳感器,如攝像頭、激光雷達、超聲波雷達、毫米波雷達、GPS等不斷采集海量多模態數據,這些數據在特征分布、拓撲結構、動態特性等方面均存在較大差異。以膠囊式循環深度學習網絡為基礎,整合多模態車輛環境信息,采用集成式模型提升目標檢測和道路分割的實時性和準確性。在利用視覺算法對多模態、多視角、多任務、三維復雜駕駛場景下的車輛、車道線、行人、交通標示的檢測、分割、識別以及道路跟蹤基礎上[2-3],采用SOC硬件加速的輕量化深度學習網絡實現海量視覺影像、點云等多模態異構數據的特征綜合提取;同時,利用幾何對抗生成網絡實現多模態特征的實時融合,設計并實現信息融合的嵌入式智能硬件,實現對未知環境的精確感知。總之,通過自動環境感知融合技術為掃路機工況環境的精確感知及繞避障等功能奠定了技術實現與升級基礎。多模態數據時融合技術結構模型圖3所示。
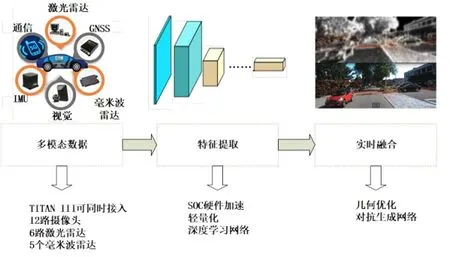
圖3 多模態數據實時融合技術架構模型
2.自動導航定位技術
結合激光點云和視覺點云的優點[4-5],SLAM(simultaneous localization and mapping,即時定位與地圖構建)技術,對未知復雜環境進行精確三維地圖構建,結合動態路徑規劃技術,解決了定位過程中對衛星信號和慣性器件性能的過度依賴問題,提升了自主智能掃路機的定位精度和可靠性,實現對自主智能掃路機的自主定位導航。多傳感器融合自動導航定位示意圖如圖4所示。
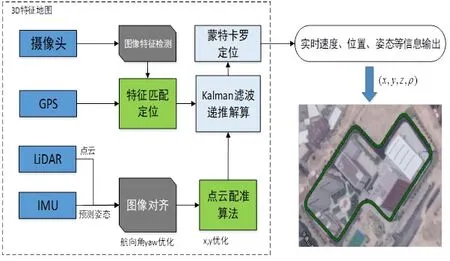
圖4 多傳感器融合自動導航定位技術
面向復雜應用場景下建圖與自主定位導航要求,在GPS定位的基礎上,通過融合多傳感器不同維度的狀態向量,根據卡爾曼濾波算法原理,基于貝葉斯概率,進一步優化更新目標的姿態位置等信息。一方面,基于無跡卡爾曼濾波的激光點云定位技術,通過研究點云配準算法,將地圖分割成塊區域,計算匹配概率,采用局部搜索實現定位,通過研究航向角優化算法,結合光流等信息,進一步矯正自主智能掃路機的位姿,通過研究點云定位中反射值與高度值自適應融合技術根據得到的融合分布計算相應權重,實現反射值與高度值的自適應融合,實現GPS信號波動較大情況下的輔助定位;另一方面,基于視覺的全局定位算法,結合IMU和輪速計信息估計車輛運動,實現GPS、視覺定位和IMU數據整合方法,優化定位結果。提出3D到2D圖像的特征匹配定位方法,結合相關粒子濾波算法,實現三維世界到二維圖像的匹配定位。
3.智能路徑規劃技術
利用4G無線通信技術,將自主智能掃路機的整車狀態(比如GPS坐標信息,掃路機運行狀況,多傳感器融合信息等)上傳到云端,結合大數據和人工智能加強掃路機對交通態勢的理解,實現自主智能駕駛系統的智能路徑規劃。
根據構建的拓撲級地圖,采用啟發式搜索算法——A*算法進行動態路徑規劃,結合實時的交通信息對預先規劃好的最優清掃路線進行適時的調整,做出合理的決策和控制。A*算法通過引入估價函數,加快了搜索速度,提高了局部擇優算法搜索的精度,是當前較為主流的路徑搜索算法。另外,針對特定場景下自主智能掃路機的路徑規劃,除了結合當天的清掃最佳路線和實時位置,自主地做出最合理的決策和控制外,可利用云端控制系統進行任務調度、車輛管理。智能路徑規劃框架如圖5所示。
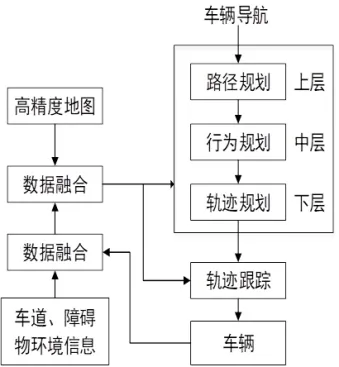
圖5 智能路徑規劃框架
應用前沿AI智能算法及計算機視覺檢測技術,在實時系統與路面潔凈度定義間建立一種映射機制,使實時視頻傳感器等測出的垃圾量直接與所檢測路面的面積形成比值,從而計算出路面垃圾覆蓋率。系統綜合垃圾面積覆蓋率及種類權重計算出對應路面清掃前的實時潔凈度指標,不同的垃圾種類在算法中采用不同權重占比。經過實際的道路測試驗證,模型總數據量約236萬,模型的實際檢測指標如表1所示,掃路機進而可根據實時潔凈度指標及作業車速實時自動匹配其風機轉速、功率等。

表1 潔凈度檢測模型指標
當路面潔凈度指標大于等于設定閾值時,采用較高轉速清掃路面,當路面的垃圾覆蓋率小于設定閾值時,采用較低轉速清掃路面,且當垃圾量大于設定閾值時系統自動抓拍路面圖片上傳至云平臺作為環衛考核依據,實際道路垃圾檢測情況如圖6所示。這樣,系統在保證清掃效果的同時能夠節約能耗,在綜合清掃路況下提升節能效率10%~20%,并會適當降低掃路機作業噪聲,產生較高的社會經濟效

圖6 道路垃圾實際檢測示例圖
掃路機自主智能駕駛技術實現與示范應用
自主智能掃路機通過線控轉向系統、制動系統、油門系統及其執行機構的整體設計,利用車載中控的屏幕顯示路徑規劃結果和當前掃路機的運行情況。同時,為了保障編程的便捷性,采用成熟的消息通信機制LCM,實現OBU內的組播通信機制。具體OBU單元的安裝位置如表2所示。

表2 OBU單元的組成零部件列表
自主智能駕駛掃路機通過持續地融合應用、優化相關自動駕駛技術與算法,帶有自動循跡、 路沿石邊緣檢測并貼邊清掃、遇障礙物停車或繞行、遙控作業、智能語音交互等功能,充分考慮環境感知融合技術的實時性,可實現采樣時間(以30張圖片和30組點云數據為參考)和融合時間<0.1 s,準確性方面數據融合正確率>96.00%。針對復雜應用場景下的自主導航定位,可實現環境定位精度優于±10 cm。
針對特定園區,自主智能掃路機可根據實際需求提供智能輔助駕駛模式、智能跟隨模式、無人駕駛模式、特殊場景遠程駕駛倉接管駕駛控制模式。如某園區可將運營時間設定為晚上、凌晨或者非高峰時段(如下午3~4點),并且可根據設置的清掃垃圾回收點、充電站點、停放點采用自動垃圾傾倒系統、智能充電系統及自動泊車系統等自啟動方式執行閉環完整的道路清掃保潔工作。自主智能駕駛掃路機園區運營主要特點及主要功能如表3所示。

表3 自主智能駕駛掃路機園區運營主要特點及主要功能
結語
自主智能駕駛純電動掃路機集激光雷達、攝像頭、毫米波雷達等多種車載傳感器,可依據路面工況,自動調整清掃保潔模式,高度適應環衛作業環境,實現了自主智能駕駛功能,讓清掃車脫離了人工操作,自主在路面上完成清掃、灑水、垃圾收集等工作,有效解決了環衛行業臟、難、效率低等問題,極大地降低了人工成本,同時讓清潔更智能、規范、高效。無人駕駛技術在環衛領域率先“跑起來”,將極大地惠及社會服務型工作者,改善環衛工人工作環境,能極大地提升資源運用效率、優化社會管理和服務以及改善居民生活質量。深入研發適用于室內外復雜大環境清掃作業的全新一代無人駕駛環衛清潔車,實現智能化環保清掃作業車的示范應用和推廣,其意義不僅在于環衛產品與技術的升級,更有可能帶來環衛產業的全新業態和價值鏈體系的重塑。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年12期)2021-08-24 03:30:40
中老年保健(2021年11期)2021-08-22 03:15:44
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
