網(wǎng)絡(luò)攻擊下的Markov跳變系統(tǒng)有限時(shí)間控制
2021-03-04 03:13:20高金鳳王錦霞汪家琪
信息安全研究 2021年2期
譚 天 高金鳳 王錦霞 汪家琪
(浙江理工大學(xué)機(jī)械與自動(dòng)控制學(xué)院 杭州 310018)
(tantian5991@163.com)
隨著信息技術(shù)和工業(yè)水平的飛速發(fā)展,網(wǎng)絡(luò)控制系統(tǒng)的研究與應(yīng)用愈發(fā)廣泛,傳統(tǒng)的“點(diǎn)對(duì)點(diǎn)”式控制系統(tǒng)由于其無(wú)法滿足當(dāng)前控制對(duì)象的遠(yuǎn)距離、多分布、可監(jiān)控、數(shù)據(jù)傳輸共享的高效率以及網(wǎng)絡(luò)安全等需求而逐漸被放棄.網(wǎng)絡(luò)控制系統(tǒng)具有高效的數(shù)據(jù)通信與共享、安裝與維護(hù)靈活、集散遠(yuǎn)程控制等優(yōu)點(diǎn),成為當(dāng)前網(wǎng)絡(luò)控制系統(tǒng)領(lǐng)域的研究熱點(diǎn)[1-2].
網(wǎng)絡(luò)控制系統(tǒng)(networked control systems, NCSs)是由傳感器、控制器、執(zhí)行器、被控對(duì)象以及共享通信網(wǎng)絡(luò)構(gòu)成的閉環(huán)系統(tǒng).當(dāng)前針對(duì)NCSs的研究主要問(wèn)題在于:一方面由于大量的被控對(duì)象使用同一通信網(wǎng)絡(luò),不可避免地存在網(wǎng)絡(luò)時(shí)延、數(shù)據(jù)丟包等影響系統(tǒng)性能的問(wèn)題;另一方面,大量的工業(yè)系統(tǒng)追求控制性能和生產(chǎn)效率而忽略了網(wǎng)絡(luò)系統(tǒng)的安全問(wèn)題,NCSs一旦遭受網(wǎng)絡(luò)黑客攻擊,極大程度上將造成重大經(jīng)濟(jì)損失[3-6].此外,目前大多數(shù)工業(yè)系統(tǒng)僅在無(wú)限時(shí)域內(nèi)維持系統(tǒng)的穩(wěn)定性,但是關(guān)于系統(tǒng)在短時(shí)間內(nèi)穩(wěn)定的暫態(tài)性能的研究,如電力網(wǎng)絡(luò)、機(jī)器人精微控制等仍然較少,有待發(fā)展.
Markov跳變系統(tǒng)是一種特殊的隨機(jī)系統(tǒng),相應(yīng)的系統(tǒng)模態(tài)由Markov過(guò)程進(jìn)行描述.不同模態(tài)之間的切換即是Markov跳變過(guò)程,也稱作Markov鏈.系統(tǒng)的參數(shù)由于會(huì)受到外界因素的干擾而發(fā)生隨機(jī)跳變,因此,實(shí)際生產(chǎn)生活中的許多對(duì)象都可以抽象為Markov跳變系統(tǒng).對(duì)于Markov跳變系統(tǒng)的研究也因此具有理論意義與實(shí)際意義[7-11].
基于上述關(guān)于Markov跳變系統(tǒng)和網(wǎng)絡(luò)攻擊的問(wèn)題,有許多學(xué)者發(fā)表了極具價(jià)值的研究文章.干珊珊等人[7]基于雙邊時(shí)延和丟包的Markov跳變系統(tǒng),研究了其有限時(shí)間控制;Liu等人[12]對(duì)遭遇隨機(jī)網(wǎng)絡(luò)攻擊的T-S模糊NCSs,研究了其量化穩(wěn)定性質(zhì);Tan等人[8]對(duì)不確定Markov跳變系統(tǒng)在無(wú)限時(shí)間域內(nèi)的混雜驅(qū)動(dòng)機(jī)制進(jìn)行了研究;Gao等人[9]在離散時(shí)間非齊次Markov跳變系統(tǒng)的基礎(chǔ)上,設(shè)計(jì)了相關(guān)的有限時(shí)間觀測(cè)器,并將推導(dǎo)的結(jié)論應(yīng)用到在直流電動(dòng)機(jī)中進(jìn)行仿真,證明了推導(dǎo)定理的有效性;Zha等人[10]在Markov跳變系統(tǒng)的基礎(chǔ)上,研究了事件觸發(fā)機(jī)制和量化對(duì)公共信號(hào)傳輸網(wǎng)絡(luò)的優(yōu)化問(wèn)題,通過(guò)減少無(wú)效信號(hào)的傳輸以降低通信負(fù)擔(dān);Ren等人[11]對(duì)正定Markov跳變神經(jīng)網(wǎng)絡(luò)在有限時(shí)間內(nèi)的穩(wěn)定性進(jìn)行了研究;Wu等人[13]在NCSs遭受欺騙攻擊的情況下,設(shè)計(jì)了相關(guān)的有限時(shí)間事件觸發(fā)濾波器,并通過(guò)仿真驗(yàn)證了其定理的合理性和有效性;Shen等人[14]對(duì)于T-S模糊Markov跳變系統(tǒng),研究了其有限時(shí)間事件觸發(fā)的H∞控制,并通過(guò)實(shí)際應(yīng)用例子仿真說(shuō)明了系統(tǒng)在有限時(shí)間內(nèi)穩(wěn)定.
綜上所述,本文研究了在遭受網(wǎng)絡(luò)攻擊情況下,Markov跳變系統(tǒng)的輸出反饋有限時(shí)間H∞控制,其中為了降低無(wú)效數(shù)據(jù)的傳輸量,降低網(wǎng)絡(luò)通信帶寬負(fù)擔(dān),提升系統(tǒng)性能,采用了混雜驅(qū)動(dòng)機(jī)制和雙通道量化.本文的主要工作包含以下幾個(gè)方面:1)建立輸出反饋Markov跳變系統(tǒng)的數(shù)學(xué)模型,引入混雜驅(qū)動(dòng)機(jī)制和雙通道量化,減少數(shù)據(jù)傳輸率,提高系統(tǒng)性能;2)引入網(wǎng)絡(luò)攻擊模型模擬系統(tǒng)遭受外部攻擊,在此情況下系統(tǒng)依然保持穩(wěn)定的狀態(tài);3)根據(jù)有限時(shí)間定義和H∞范數(shù)有界定義,證明了系統(tǒng)在漸近穩(wěn)定的情況下能夠保持有限時(shí)間穩(wěn)定且滿足H∞性能指標(biāo).
1 問(wèn)題描述與系統(tǒng)建模
1.1 系統(tǒng)描述
考慮如下所示的Markov跳變系統(tǒng):
(1)
其中,?(t),y(t),z(t)分別表示狀態(tài)向量、測(cè)量輸出與控制輸入;u(t)表示控制輸出;N(t)表示注入系統(tǒng)的外部擾動(dòng)信號(hào).它們均滿足:?(t)∈m,y(t)∈n,z(t)∈p,N(t)∈q,其中且滿足

其中,λij表示從模態(tài)i跳變到模態(tài)j的轉(zhuǎn)移概率.
為方便表示,令rt=i,則Art,Brt,Crt,Drt,Ert,Frt分別由Ai,Bi,Ci,Di,Ei,Fi替代.
為研究本文所涉及的系統(tǒng)的穩(wěn)定性,我們定義如下輸出反饋控制器:
u(t)=Kiy(tkh),
(2)
其中,t∈[tkh+τtk,tk+1h+τtk+1),i∈S,Ki表示系統(tǒng)處于不同模態(tài)時(shí)控制器的增益,τtk表示傳感器到控制器、控制器到執(zhí)行器的時(shí)延,也即系統(tǒng)時(shí)延.
1.2 混雜驅(qū)動(dòng)機(jī)制
對(duì)于網(wǎng)絡(luò)控制系統(tǒng),在保證系統(tǒng)通信質(zhì)量良好、維護(hù)系統(tǒng)穩(wěn)定性的前提下,盡可能地減少“無(wú)效信號(hào)”的傳輸與發(fā)送,以節(jié)省網(wǎng)絡(luò)帶寬資源和降低網(wǎng)絡(luò)通信負(fù)擔(dān).基于文獻(xiàn)[15],我們利用混雜驅(qū)動(dòng)機(jī)制以處理信號(hào)傳輸問(wèn)題.
1.2.1 時(shí)間觸發(fā)機(jī)制
傳感器在固定時(shí)間進(jìn)行數(shù)據(jù)采集的模式,稱為時(shí)間觸發(fā)機(jī)制.定義系統(tǒng)時(shí)延?(t)=t-tkh,其中t∈[tkh+τtk,tk+1h+τtk+1),此時(shí),相應(yīng)的控制器為
u1(t)=Kiy(t-?(t))=KiDi?(t-?(t)),
(3)
其中0≤?(t)≤?m,?m表示系統(tǒng)時(shí)延的上界.
1.2.2 事件觸發(fā)機(jī)制
為解決時(shí)間觸發(fā)機(jī)制數(shù)據(jù)冗余的弊端,文獻(xiàn)[16]提出了一種新的數(shù)據(jù)采集方式,即事件觸發(fā)機(jī)制.混雜驅(qū)動(dòng)機(jī)制是由伯努利分布將時(shí)間觸發(fā)與事件觸發(fā)進(jìn)行統(tǒng)一.與時(shí)間觸發(fā)的固定周期數(shù)據(jù)采樣方式不同,傳感器采集的信號(hào)要進(jìn)行傳輸,其需要滿足以下條件[17]:

(4)
其中,ek(t)=?(tkh)-?(tkh+sh),且s為非負(fù)整數(shù),數(shù)據(jù)傳輸時(shí)間的區(qū)間為[tkh,tk+1h),Ω為正定對(duì)稱加權(quán)矩陣,且δ∈[0,1].
根據(jù)文獻(xiàn)[18],將Markov跳變系統(tǒng)建模為等價(jià)的時(shí)滯系統(tǒng),其相應(yīng)的輸出反饋事件觸發(fā)條件變?yōu)?/p>
(5)

?(tkh)=?(t-τ(t))+ek(t),
(6)
根據(jù)式(2)和式(6),相應(yīng)的系統(tǒng)控制器為
u2(t)=Kiy(tkh)=KiDi?(tkh)=
KiDi[?(t-τ(t))+ek(t)],
(7)
根據(jù)系統(tǒng)模型式(1)與事件觸發(fā)條件式(5),在本文研究的系統(tǒng)中,當(dāng)違背以下事件觸發(fā)條件時(shí),采樣信號(hào)才得以傳輸:

(8)
綜上,基于文獻(xiàn)[15]可以得到基于混雜驅(qū)動(dòng)機(jī)制的控制器:
u?(t)=α(t)u1(t)+(1-α(t))u2(t)=
α(t)KiDi?(t-?(t))+(1-α(t))×
KiDi[?(t-τ(t))+ek(t)],
(9)

1.3 量 化
在當(dāng)前網(wǎng)絡(luò)控制系統(tǒng)中,面對(duì)大量的分散數(shù)據(jù)采集點(diǎn)發(fā)送數(shù)據(jù)的情況,傳輸所有的數(shù)據(jù)顯得不現(xiàn)實(shí).有學(xué)者提出了量化技術(shù)[19],將連續(xù)信號(hào)離散化,從而在通信時(shí)僅傳輸少量量化后的數(shù)據(jù),降低了網(wǎng)絡(luò)通道負(fù)擔(dān).根據(jù)文獻(xiàn)[20],定義量化器h(y)=[h1(y1)h2(y2)h3(y3)…h(huán)n(yn)]T,設(shè)置于傳感器端,其中,hi(yi)為
h(x)=(I+Δh)x.
(10)
同理,類似于h(y),另一側(cè)通道的量化器可表示為
g(x)=(I+Δg)x.
(11)
綜上所述, 在混雜驅(qū)動(dòng)機(jī)制的基礎(chǔ)上,考慮雙通道的量化器,有如下控制器:
uqs(t)=α(t)Ki(I+Δh)(I+Δg)Di?(t-?(t))+
(1-α(t))Ki(I+Δh)(I+Δg)Di[?(t-τ(t))+
ek(t)]=α(t)(Ki+ΔKi)Di?(t-?(t))+
(1-α(t))(Ki+ΔKi)Di[?(t-τ(t))+ek(t)],
(12)
其中ΔKi=ΔgKi+KiΔh+ΔgKiΔh.
1.4 欺騙攻擊
在通信網(wǎng)絡(luò)中,由于網(wǎng)絡(luò)安全的缺失,使得網(wǎng)絡(luò)系統(tǒng)在傳輸數(shù)據(jù)的過(guò)程中極易遭遇來(lái)自外界的攻擊,欺騙攻擊屬于其中的一種攻擊方式.攻擊者通過(guò)向公共網(wǎng)絡(luò)通道中注入欺騙信號(hào),達(dá)到干擾正常信號(hào)傳輸?shù)哪康?造成系統(tǒng)的失穩(wěn)甚至崩潰.為了處理這樣的問(wèn)題,文獻(xiàn)[22]提出了一種方式,將欺騙攻擊建模為如下形式:
(13)

其中H為常系數(shù)矩陣,表示攻擊上限.
忽略欺騙攻擊的時(shí)延,在控制器側(cè)有
(14)
在該Markov跳變系統(tǒng)中,若欺騙攻擊事件發(fā)生在傳感器采樣輸出之前,根據(jù)式(13)(14),有
u(t)=uqs(t)+β(t)[KiDiξ(t)-uqs(t)].
(15)

根據(jù)式(12)~(14),系統(tǒng)的輸出反饋控制器可以改寫為
u(t)=(1-β(t))α(t)(Ki+ΔKi)Di?(t-?(t))+
(1-β(t))(1-α(t))(Ki+ΔKi)Di[?(t-τ(t))+
ek(t)]+β(t)KiDiξ(t).
(16)
綜上所述,本文中基于混雜驅(qū)動(dòng)機(jī)制的Markov跳變連續(xù)系統(tǒng)可定義為
(17)
為方便穩(wěn)定性定理的證明,下面給出相關(guān)的定義與引理.
定義1[23].給定正標(biāo)量參數(shù)和正定矩陣(ε1,ε2,R,d)及時(shí)間區(qū)間t∈[0,T],其中T>0,0<ε1<ε2.Markov跳變系統(tǒng)式(17)是有限時(shí)間有界的,如果以下條件成立:

定義2[24].在定義1的基礎(chǔ)上,當(dāng)系統(tǒng)處于零初始條件,Markov跳變系統(tǒng)式(17)滿足參數(shù)γ>0的有限時(shí)間H∞性能水平,即
引理1[25].若存在τ(t)>0且屬于[τlest,τhest]和適維矩陣Mi(i=1,2,3),如下不等式成立:
(τ(t)-τlest)M1+(τhest-τ(t))M2+M3<0,
且等價(jià)于
(τhest-τlest)M1+M3<0,(τhest-τlest)M2+M3<0.
2 主要結(jié)果
在本節(jié)中,針對(duì)基于混雜驅(qū)動(dòng)機(jī)制和量化的Markov跳變系統(tǒng),在遭遇欺騙攻擊的情況下,推導(dǎo)了該系統(tǒng)在有限時(shí)間內(nèi)的H∞穩(wěn)定性定理.

(18)
(19)
其中

證明. 針對(duì)閉環(huán)Markov跳變系統(tǒng)式(17),考慮構(gòu)建如下Lyapunov-Krasovskii泛函:
V(t)=V1(t)+V2(t)+V3(t),
(20)
其中
V1(t)=?(t)TPi?(t),
求取泛函式(20)的導(dǎo)數(shù)及期望:

令

根據(jù)自由權(quán)矩陣方法及引理1:

以上是在無(wú)限時(shí)間內(nèi)系統(tǒng)的穩(wěn)定性證明,下面考慮在有限時(shí)間內(nèi)系統(tǒng)的穩(wěn)定性.
由式(18)可知:
(21)
對(duì)式(21)左右同乘以?e-?t,并根據(jù)Newton-Leibniz公式從0到T進(jìn)行積分,可以得到:


E{V(0)}≤λ?ε1,
其中

另外
E{?(t)TPi?(t)}≥λmin[Pi]E{?(t)TRi?(t)}.
由此,式(19)成立,即Markov跳變系統(tǒng)式(17)是有限時(shí)間有界的.針對(duì)系統(tǒng)式(17)的H∞性能,有

對(duì)等式左右同乘e-?t,并在零初始條件下對(duì)其在0到T進(jìn)行積分,可以得到


證畢.
3 數(shù)值仿真
為說(shuō)明本文所提出的定理的有效性,本節(jié)將給出2個(gè)仿真實(shí)例進(jìn)行驗(yàn)證說(shuō)明.
例1.考慮如下系統(tǒng)參數(shù).
模態(tài)1:
模態(tài)2:
混雜驅(qū)動(dòng)桿狀圖如圖1所示,狀態(tài)響應(yīng)曲線如圖2所示.
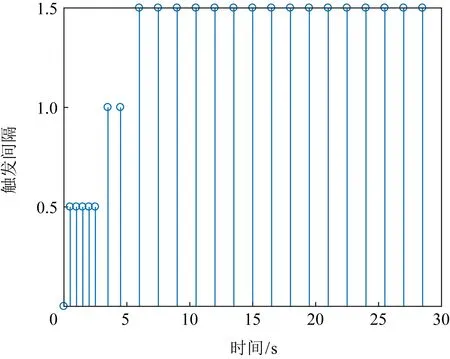
圖1 觸發(fā)桿狀圖(例1)
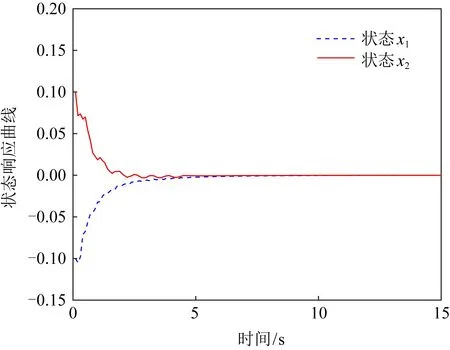
圖2 狀態(tài)響應(yīng)曲線(例1)
由圖1可知,在混雜驅(qū)動(dòng)狀態(tài)下,數(shù)據(jù)的傳輸量為24,即在采樣周期為0.1的情況下,30 s內(nèi)的數(shù)據(jù)傳輸率為8%,且系統(tǒng)在有限的時(shí)間內(nèi)能夠趨于漸進(jìn)穩(wěn)定.此外,在系統(tǒng)中設(shè)計(jì)的攻擊信號(hào)函數(shù),模擬了控制系統(tǒng)在遭遇網(wǎng)絡(luò)攻擊的情況,系統(tǒng)依然能夠在有限時(shí)間內(nèi)恢復(fù)穩(wěn)定,表明了本文提出并推導(dǎo)的定理的有效性.
例2.考慮風(fēng)光微電網(wǎng)直流發(fā)電系統(tǒng)如圖3所示:
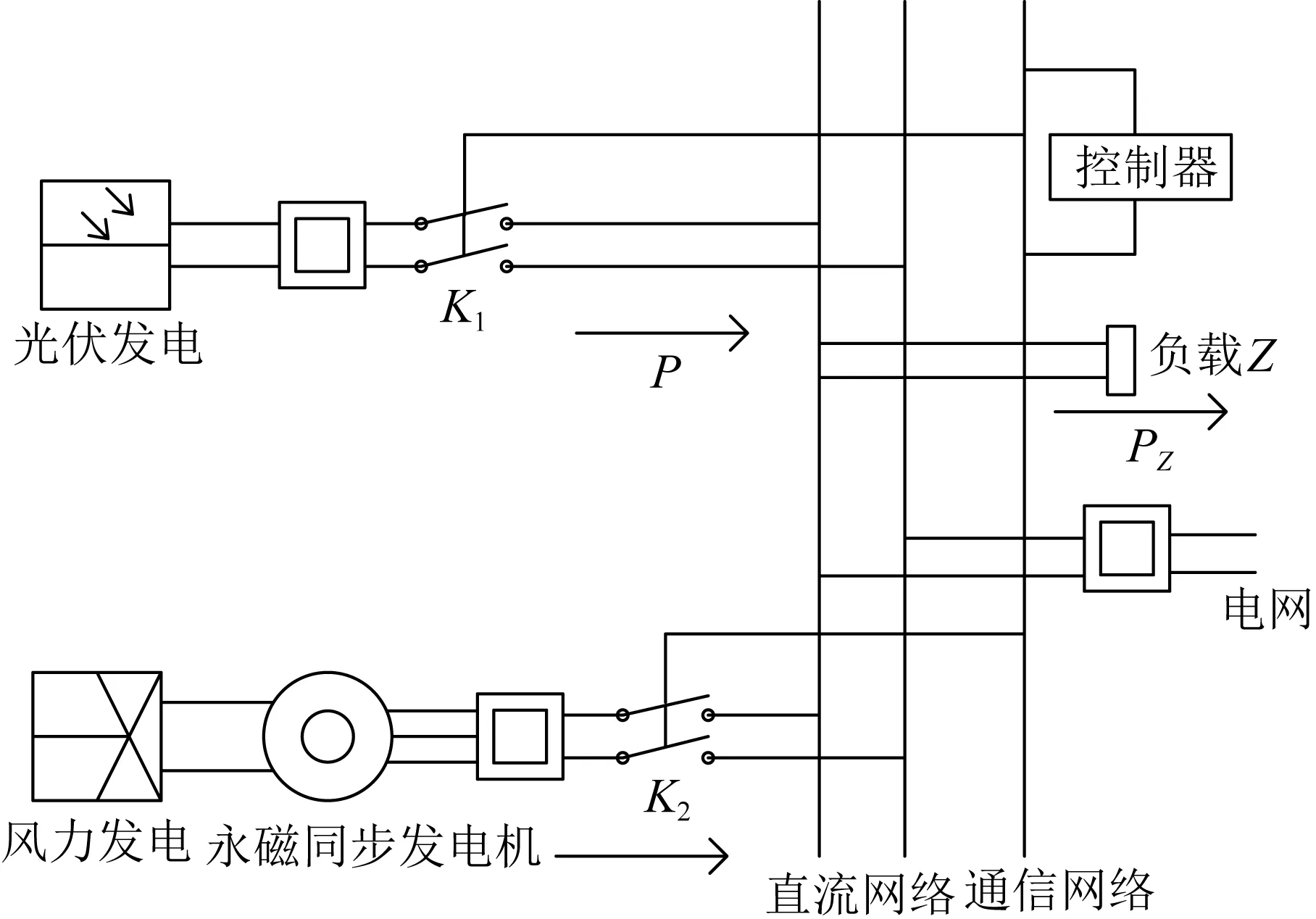
圖3 風(fēng)光微電網(wǎng)直流發(fā)電系統(tǒng)結(jié)構(gòu)示意圖
風(fēng)能與太陽(yáng)能作為清潔能源,其取之不盡可再生的特點(diǎn)使得應(yīng)用風(fēng)能與光能發(fā)電的理念越來(lái)越普及.由于風(fēng)能與光能作為自然能源是不可控的,因此采用Markov跳變系統(tǒng)對(duì)光伏發(fā)電與風(fēng)力發(fā)電系統(tǒng)進(jìn)行建模,使2種發(fā)電模式在實(shí)際中可以互補(bǔ),最大程度保障發(fā)電系統(tǒng)的穩(wěn)定性.
根據(jù)該微電網(wǎng)系統(tǒng)結(jié)構(gòu)圖,令rt=i={1,2}表示2種跳變模式,系統(tǒng)發(fā)電在光伏與風(fēng)能之間進(jìn)行切換.令x1(t)表示發(fā)電端輸出功率,x2(t)表示負(fù)載功率.相關(guān)控制系統(tǒng)的參數(shù)矩陣為:
Markov跳變系統(tǒng)的轉(zhuǎn)移概率和外部攻擊參數(shù)與例1相同.利用LMI工具箱,可以求得控制器的反饋增益為:
混雜驅(qū)動(dòng)桿狀圖如圖4所示,狀態(tài)響應(yīng)曲線如圖5所示.
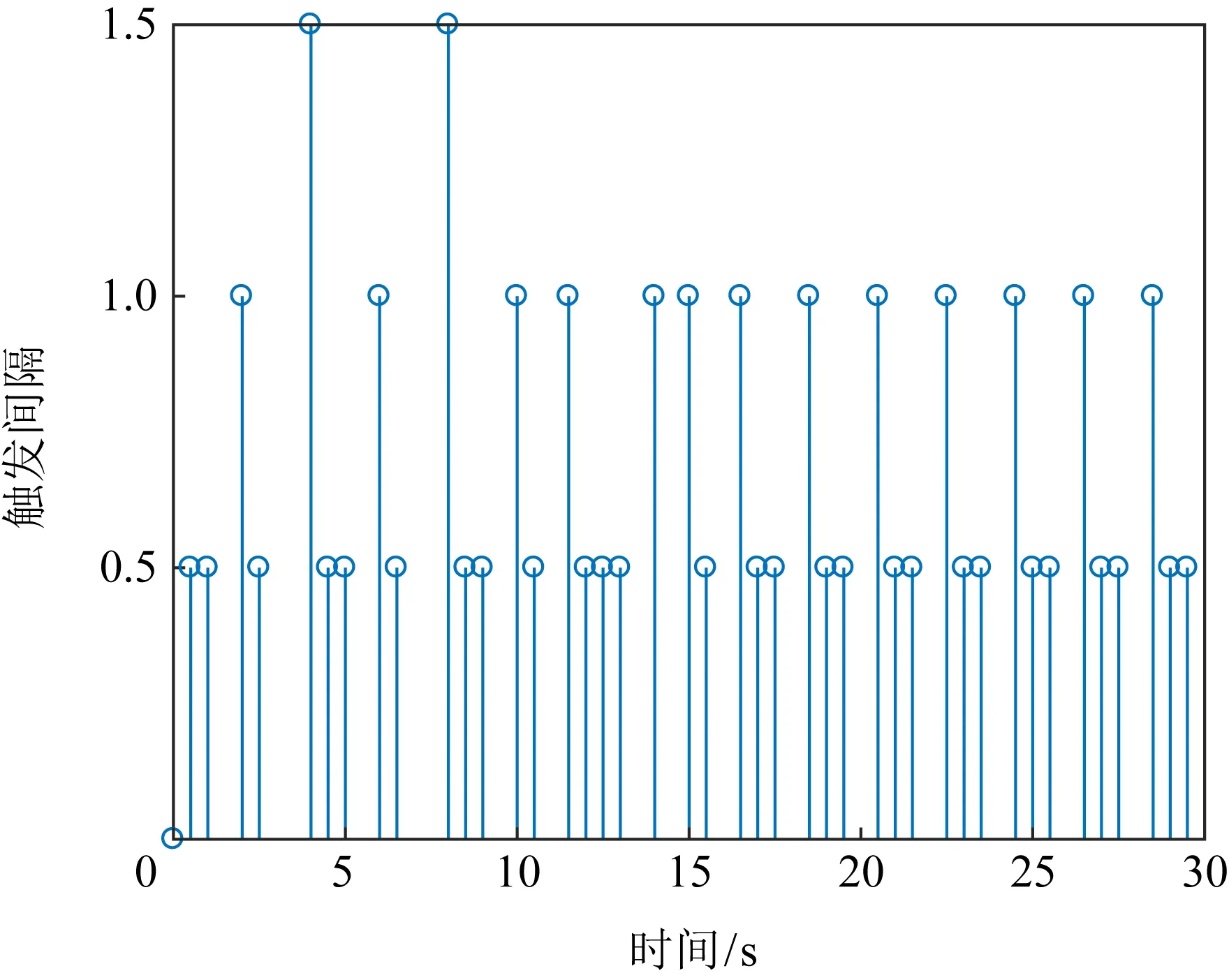
圖4 觸發(fā)桿狀圖(例2)
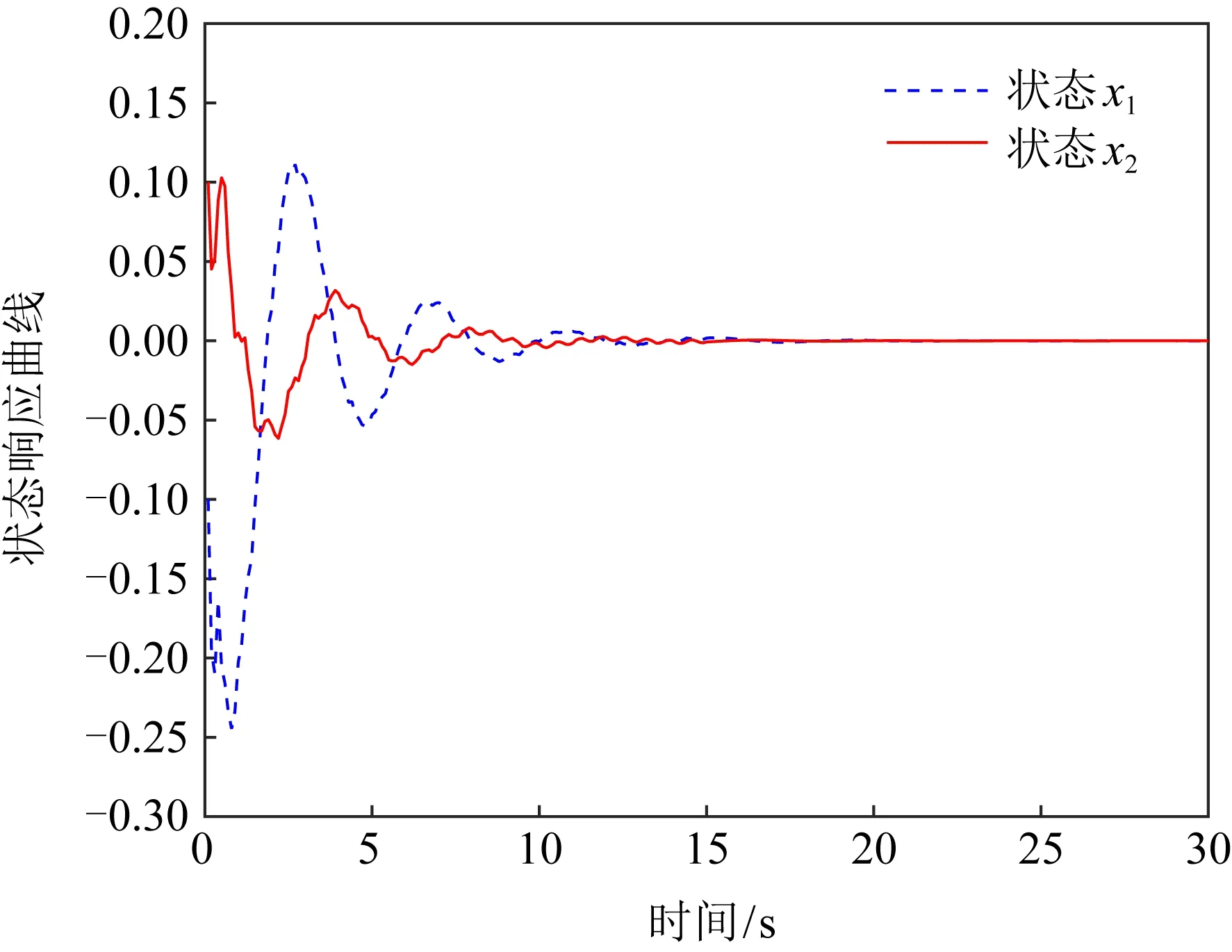
圖5 狀態(tài)響應(yīng)曲線(例2)
從圖4與圖5可以看出,當(dāng)微電網(wǎng)系統(tǒng)在遭遇外部攻擊時(shí),系統(tǒng)依然可以在有限時(shí)間內(nèi)保持穩(wěn)定狀態(tài),表明了本文推導(dǎo)的定理在實(shí)際應(yīng)用中依然具備有效性.
4 結(jié) 論
本文針對(duì)基于混雜驅(qū)動(dòng)機(jī)制和量化的Markov跳變系統(tǒng)有限時(shí)間輸出反饋控制進(jìn)行了研究,利用伯努利分布統(tǒng)一了時(shí)間觸發(fā)機(jī)制和事件觸發(fā)機(jī)制,在數(shù)據(jù)傳輸與系統(tǒng)性能之間確定了新的平衡關(guān)系.在傳感器-控制器和控制器-執(zhí)行器2個(gè)通道設(shè)置了對(duì)數(shù)量化器,降低通信網(wǎng)絡(luò)的帶寬占用率.此外,考慮當(dāng)前工業(yè)網(wǎng)絡(luò)安全問(wèn)題,將相關(guān)的網(wǎng)絡(luò)攻擊模型引入系統(tǒng).利用線性矩陣不等式,給出了系統(tǒng)在有限時(shí)間穩(wěn)定的充分條件,并利用仿真驗(yàn)證了提出的定理的有效性,表明當(dāng)系統(tǒng)遭受外部的網(wǎng)絡(luò)攻擊時(shí)依然能夠在有限時(shí)間內(nèi)維持穩(wěn)定.在未來(lái)的研究計(jì)劃中,我們將在現(xiàn)有的研究基礎(chǔ)上,在Markov跳變系統(tǒng)中引入模糊控制與神經(jīng)網(wǎng)絡(luò),以研究在不同的控制作用下系統(tǒng)的各項(xiàng)性能差異.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年21期)2018-11-09 01:23:06
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
中國(guó)衛(wèi)生(2015年9期)2015-11-10 03:11:12
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
中國(guó)衛(wèi)生(2014年3期)2014-11-12 13:18:12
中國(guó)火炬(2014年4期)2014-07-24 14:22:19