多傳感器融合車載電池艙滅火方法研究
2021-03-05 07:11:58劉煜,周銳,趙杰
汽車電器 2021年2期
劉 煜, 周 銳, 趙 杰
(陜西重型汽車有限公司汽車工程研究院, 陜西 西安 710200)
隨著時代發展,電動汽車逐步成為各大主機廠研發的重點,電池作為其中的核心,安全問題也一直備受重視。多傳感器融合車載電池艙滅火方法研究,通過溫度、煙霧濃度傳感器實時監控環境,考慮單一傳感器失效及誤報,將可靠性理論應用至車載電池艙領域,實現對火災的自適應判斷。
針對火災過程,國內學者對火災發生的典型特征進行分析,綜合多傳感器進行相關研究。傅天駒、鄭嫦娥、田野等提出一種深度學習的森林火災識別算法,運用卷積神經網絡進行訓練[1]。孫福志、于軍琪、楊柳提出一種火災識別算法,利用粗糙集理論,設計火災特征的知識系統,實現對火災的良好識別[2]。Tansky D提出一種多分辨率傳感器數據融合的滅火算法,將掃描的信息集成至一個模型中,實現了模型數據的融合[3]。
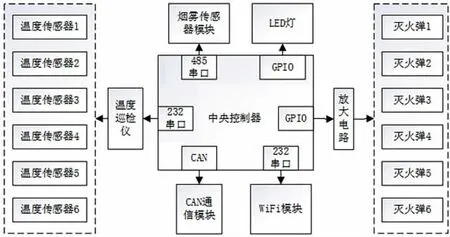
圖1 系統結構圖
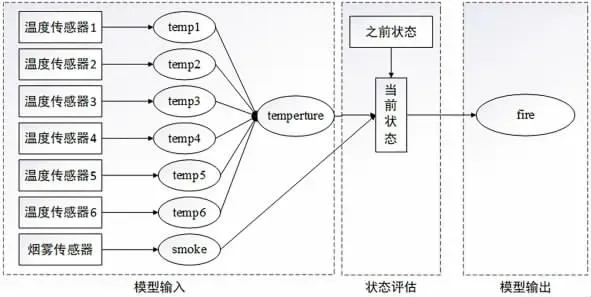
圖2 模型拓撲結構
1 模型拓撲圖設計
自主開發的車載電池艙滅火系統,其系統結構如圖1所示,包括溫度巡檢儀、煙霧傳感器、中央控制器、報警模塊及滅火彈。當系統監測到溫度和煙霧信息后,中央控制器進行數據存儲,并通過液晶顯示模塊實時顯示,當觸發滅火時,中央控制器輸出電信號觸發滅火彈噴射。
火災發生可通過溫度、煙霧濃度等變量參數體現,不同階段的變量參數值相差很大,在實際應用中,當傳感器失效或存在誤報情況時,對系統判斷的整體影響較大。本文引入多傳感器融合車載電池艙滅火方法研究,建立貝葉斯模型拓撲圖,如圖2所示,包括模型輸入溫度傳感器值和濃度傳感器值、上一狀態與當前狀態的評估以及是否最終著火的模型輸出。
1.1 貝葉斯網絡理論介紹
貝葉斯網絡用二元組B=(D,P) 來表示,D表示由元素構成的有向無環圖,P表示元素的條件概率,對于元素來說,其結果表示為條件概率P(Xi/π(Xi)),其中π(Xi)表示該元素的上一元素代表的變量值,綜合元素得出的聯合概率分布函數如式(1) 所示。

1.2 仿真驗證
本文運用Netica軟件進行貝葉斯網絡模型設計,如圖3所示,輸入變量有:temp1~temp6代表溫度傳感器值的先驗概率,smoke、tempterature分別表示煙霧傳感器濃度及溫度傳感器判斷火災發生的極大后驗概率,fire表示最后綜合判斷火災發生的條件概率,temp1~temp6、tempterature的初始發生火災概率設為50%。
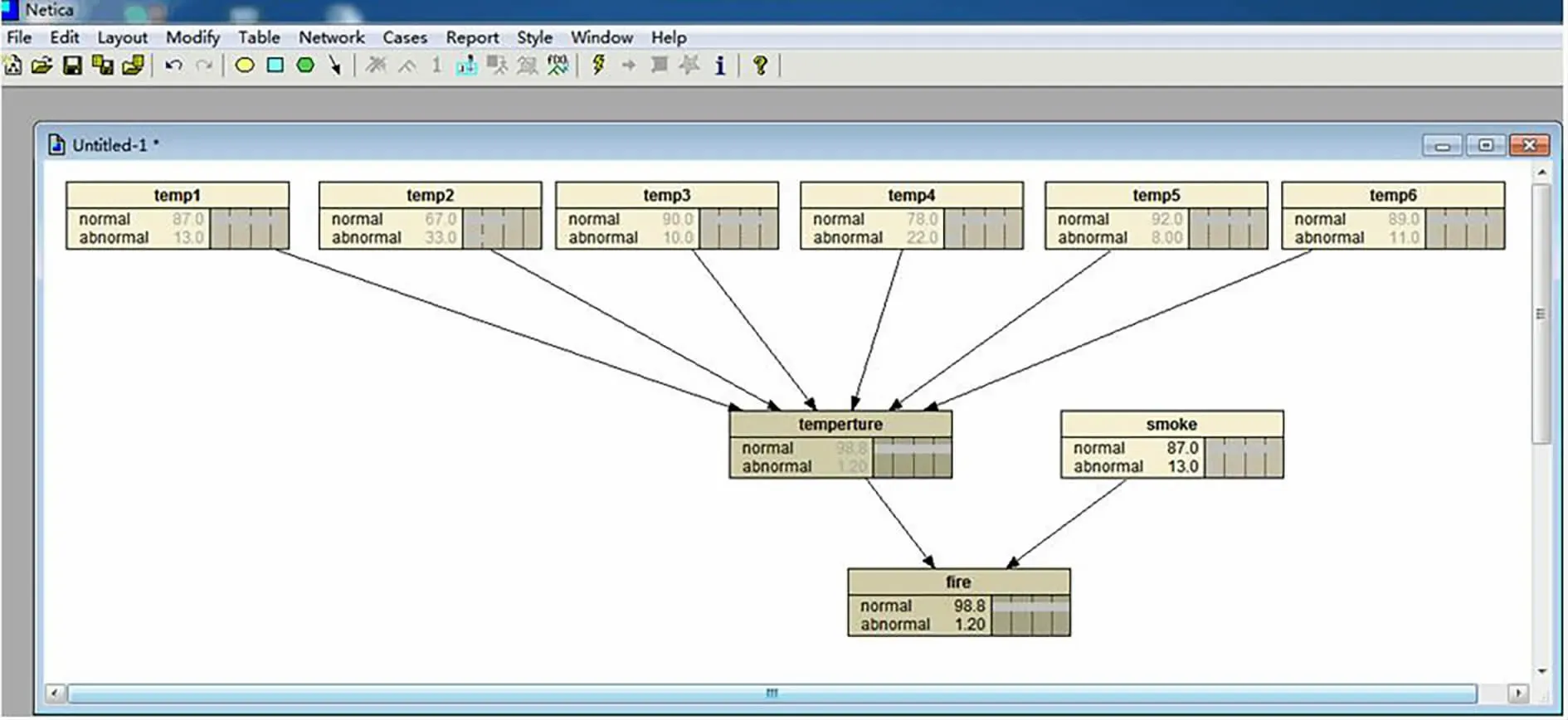
圖3 火災判定貝葉斯網絡模型
火災概率分布如圖4所示,發生火災表示為abnormal,未發生火災表示為normal,初始狀態概率均設為50%,后續概率隨數據變化而變化。
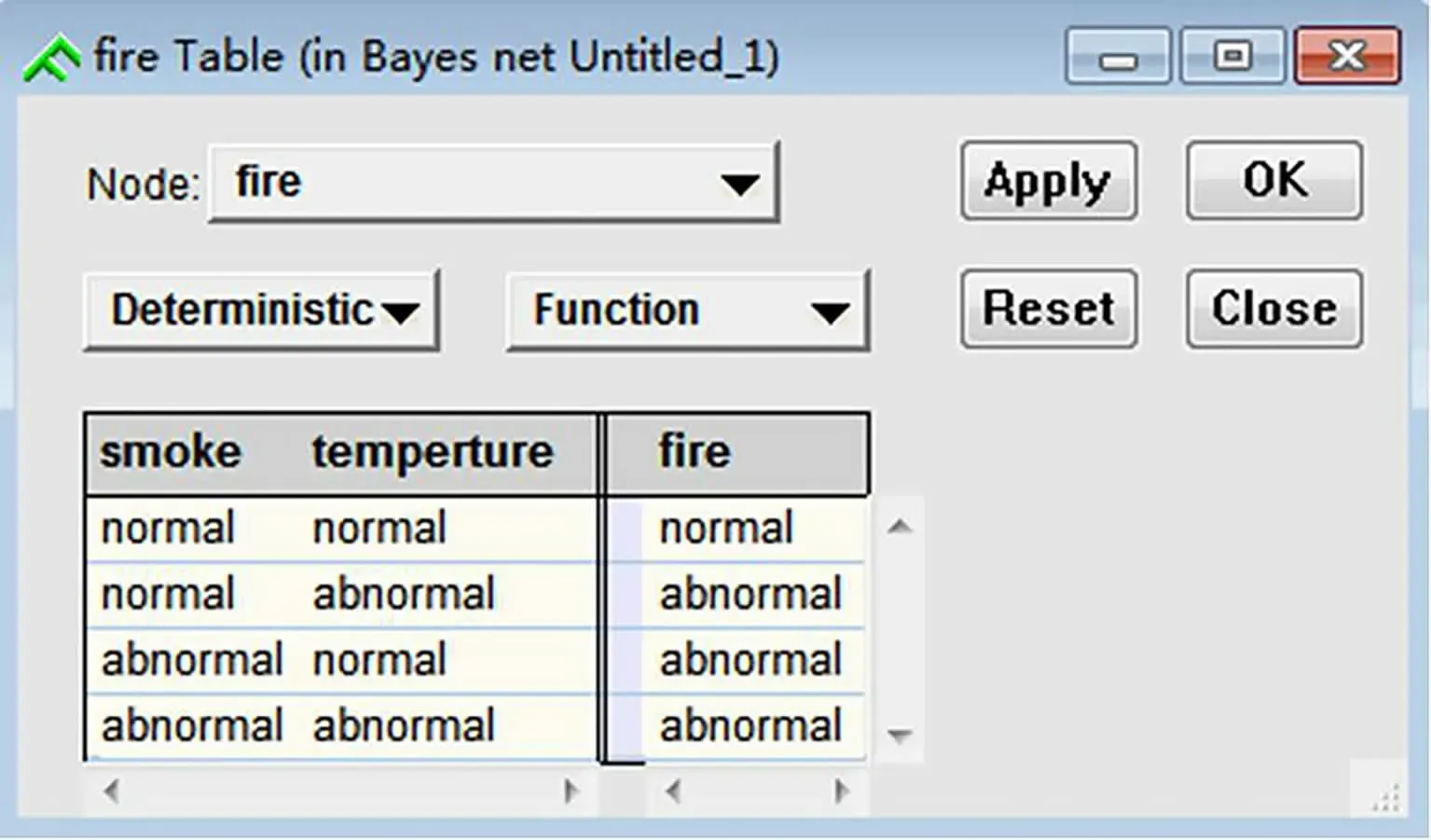
圖4 火災概率分布
將參數T1,T2,T3,T4,T5,T6,Ci和輸出變量P代入式(2):

式中:狀態變量T1,T2,T3,T4,T5,T6——溫度傳感器1~6的溫度值;Ci——煙霧濃度;觀測P——是否發生火災。
依據圖2的模型拓撲結構圖,將變量代入得出有向邊集合,見式(3):

當實際獲得了某一時刻的全部輸入變量 (假設為W),見式(4):

是否著火(假設為M) 的條件概率,見式(5):

由式(6) 得出未著火的后驗概率PA,由式(7) 得出著火的后驗概率PB,歸一化,由式(8) 得出最終P1著火的極大后驗概率P1。
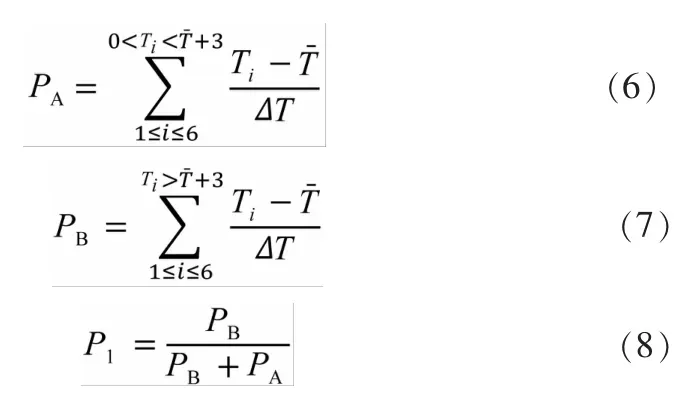
式中:Tu1,Tu2,Tu3,Tu4,Tu5,Tu6——單次測試中的溫度值;ΔT——其溫度中的最大溫度與最小溫度的差值;T——平均溫度;Ti——單次測試中溫度中的某一溫度。
由式 (9) 得出未著火的后驗概率PC,由式 (10) 得出著火的后驗概率PD。

式中:Ci——實驗實時采集的煙霧濃度數據;C——平均值,取測試的當次數據及前9組煙霧濃度數據。
歸一化,由式(11) 得出煙霧判斷著火的極大后驗概率P2。最后由式(12) 得出最終著火的條件概率P。
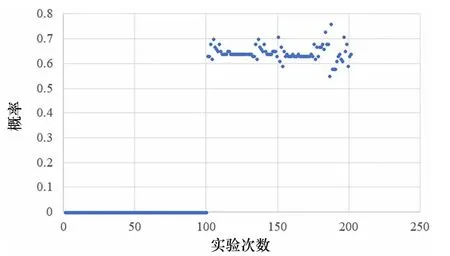
圖5 概率分布散點圖
將當次溫度數據25、34、26、25、29、29,煙霧濃度數據120、100、110、90、150、110、100、300、410、500代入數據計算得:
根據式 (10) ~(13) 計算出PA=0.25,PB=0.75,P1=0.75,P2=0.834。
最后計算得著火概率為P=0.9585。
如圖5所示,運用Netica軟件進行概率識別,0~100組數據表示未著火概率,其值為0;101~200組數據為著火概率,從0.5~0.8不等。根據著火概率統計分布,著火的概率區間處于0.6~0.8的組數最多,所以將概率閾值設為0.6,作為實車驗證測試的閾值。
2 實車實驗
2.1 熱量分布規律驗證實驗
2.1.1 實驗設備與環境
實測布局時,溫度傳感器1~6以中間支架為界,與支架左右各20cm的平行平面,以每隔30cm等距左右各放置3組溫度傳感器,溫度傳感器7布置于電池艙外側,用于室溫采集。為驗證車載電池艙熱量分布規律,實驗所需設備為:火源(電暖器) 1個,溫度傳感器7個,實驗車輛1輛。
為驗證熱量分布規律,實際測試時將火源放置于傳感器3與4下方20cm處,傳感器1、2放置于火源左側20cm處,傳感器5、6放置于火源右側20cm處,傳感器7用于室溫的采集,之后將溫度傳感器1~6 與火源的距離設為30cm、40cm、50cm,分別測試6組傳感器的溫度數據,各記錄62.5s,相關布局圖如圖6所示。
2.1.2 實驗結果與分析
熱量分布規律結果如圖7~圖10所示。
圖7~圖10中,火源正對中間傳感器3和4,正下方20cm,傳感器3和4的溫度上升范圍最大,溫度從25℃上升到60℃,溫度增長率最高,傳感器1、2、5、6溫度上升范圍從25℃到50℃,其溫度增長率低于傳感器3、4。
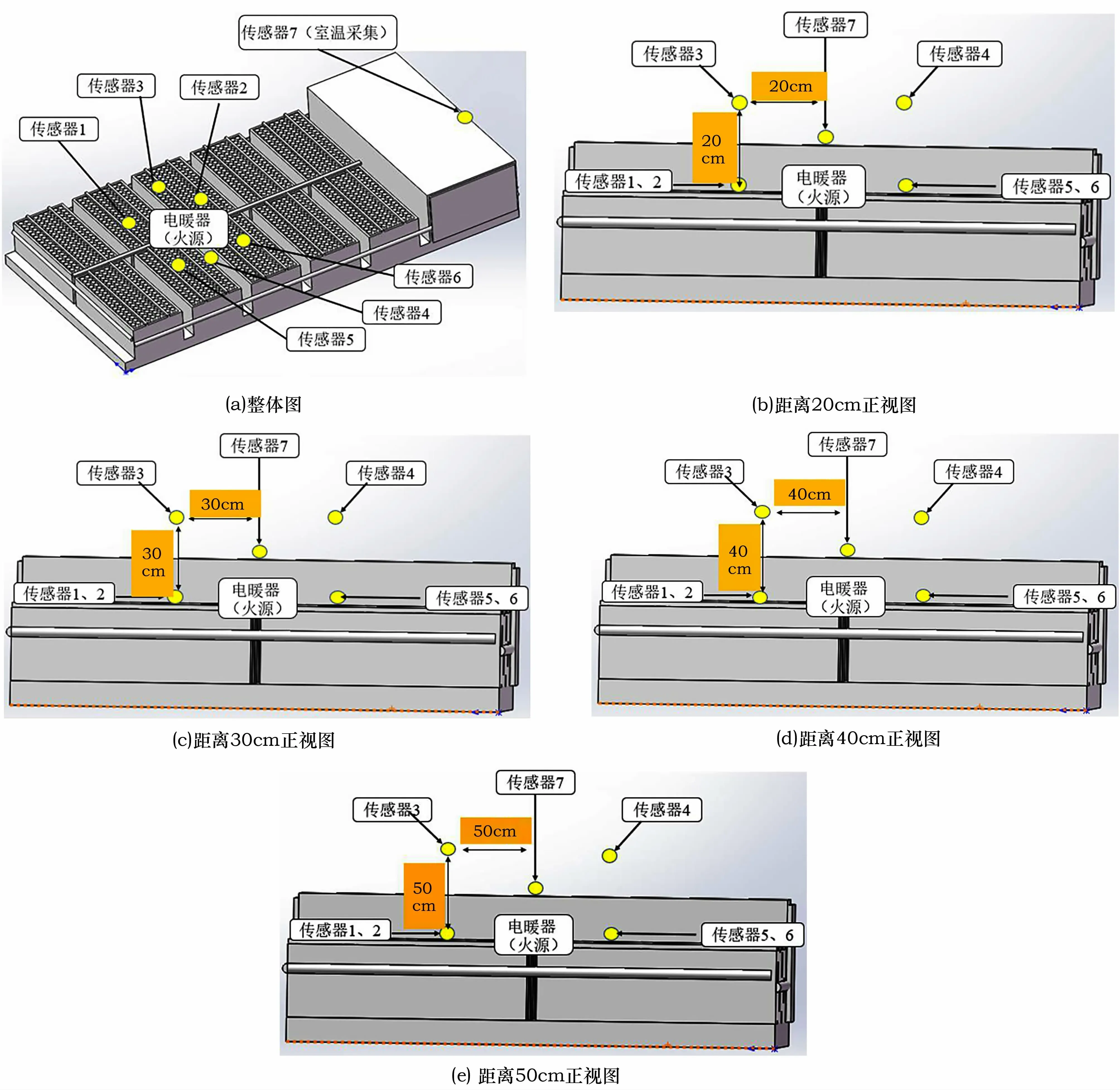
圖6 傳感器布局圖
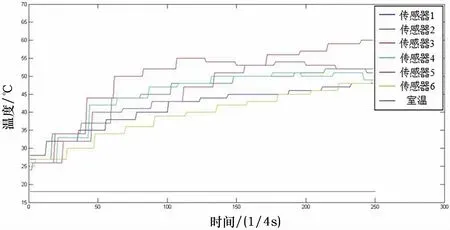
圖7 距離20cm量測溫度
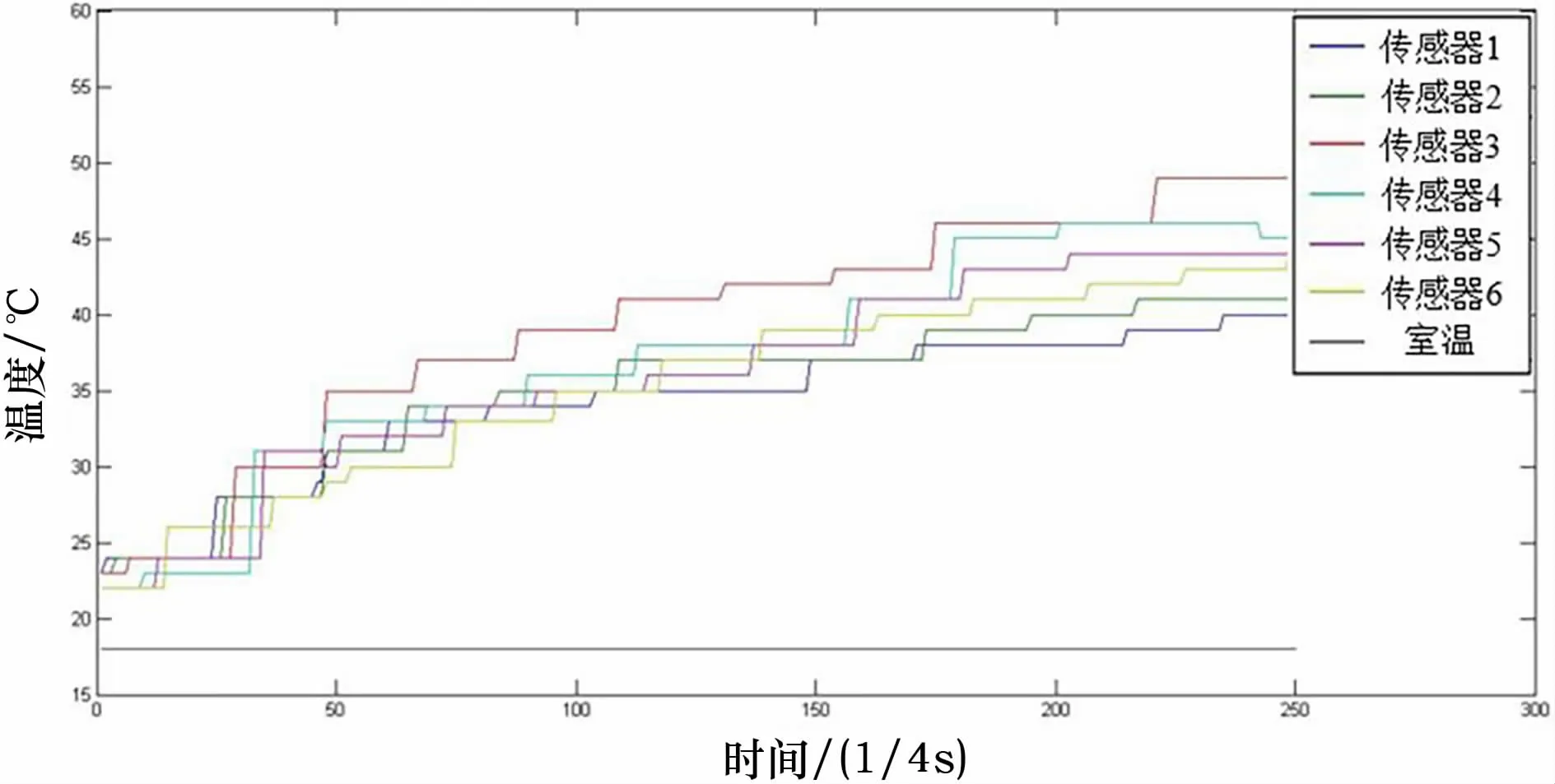
圖8 距離30cm量測溫度
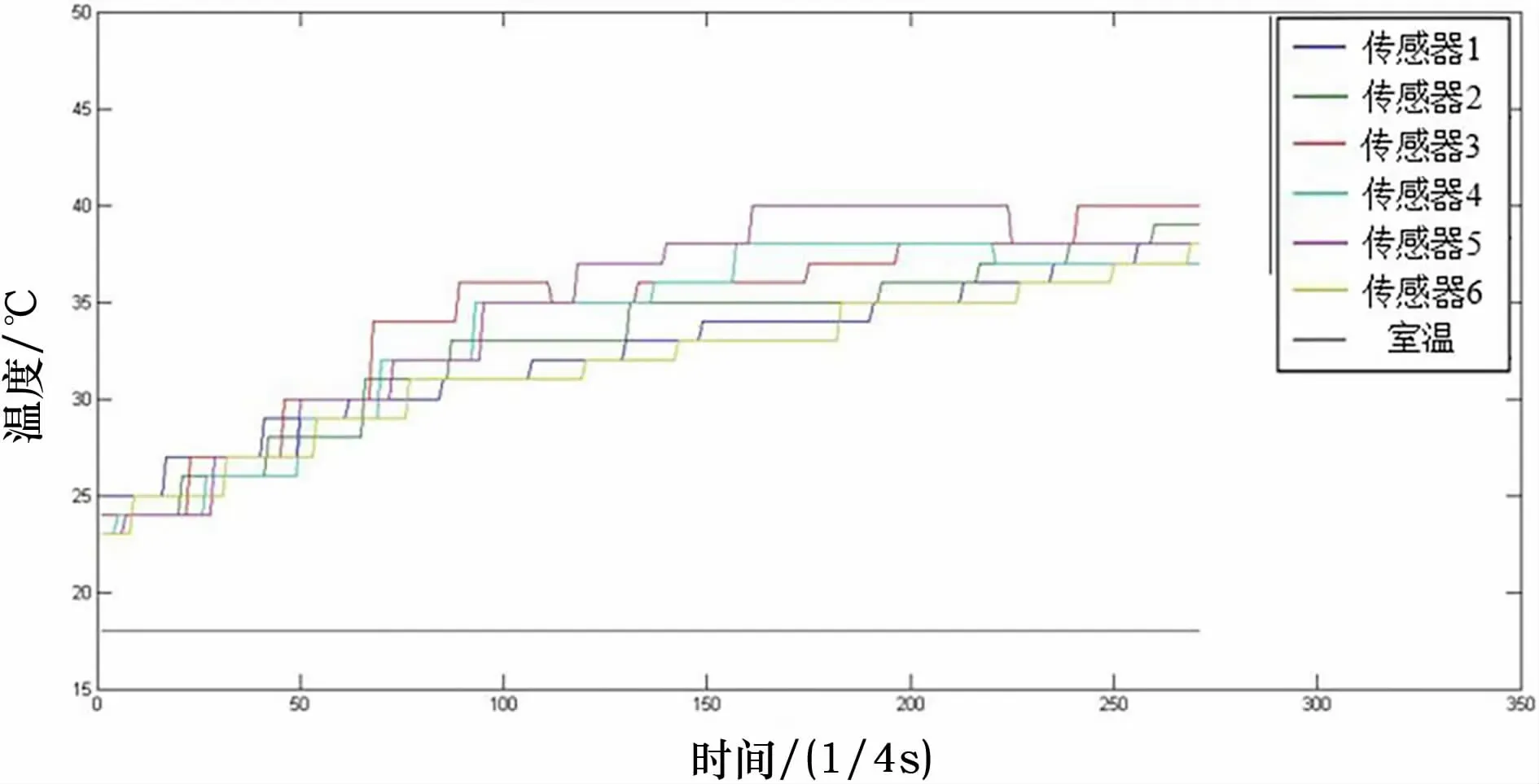
圖9 距離40cm量測溫度
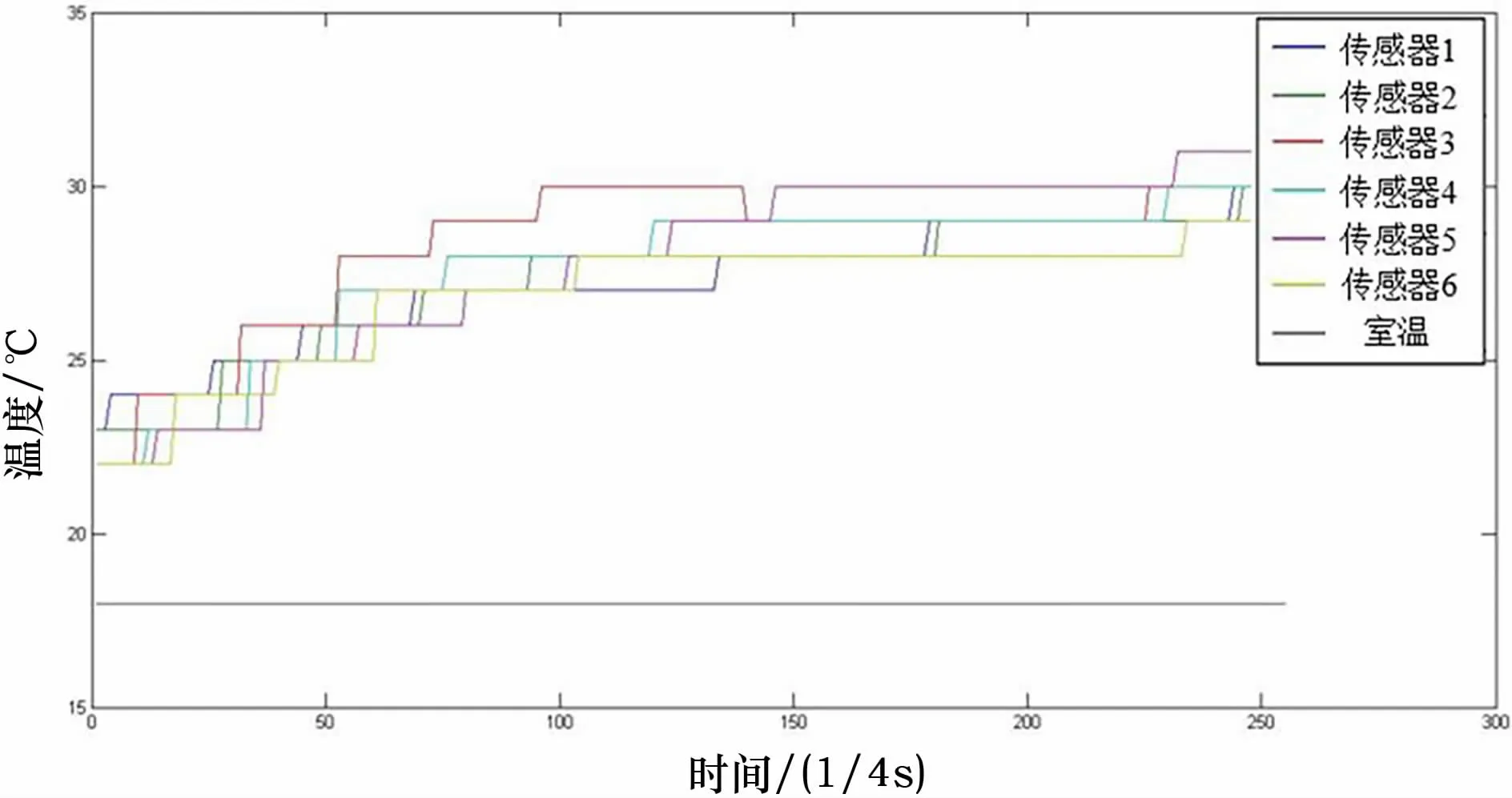
圖10 距離50cm量測溫度
故得出結論,系統工作時,測得火源的熱量先經由上方傳遞給左右兩側,當傳感器距火源30cm以下時,可以獲得較大的溫升速率,故實際測量時將傳感器布置于電池艙的上方30cm處,當電池艙著火時可以獲得較快的溫升速率,提高滅火系統的靈敏性。
2.2 電池艙放火實驗
2.2.1 實驗設備與環境
如圖11所示,其中圖11a表示車載電池艙智能滅火系統本體,圖11b表示放火實驗時使用的滅火彈,圖11c表示設置火源著火后的效果圖。
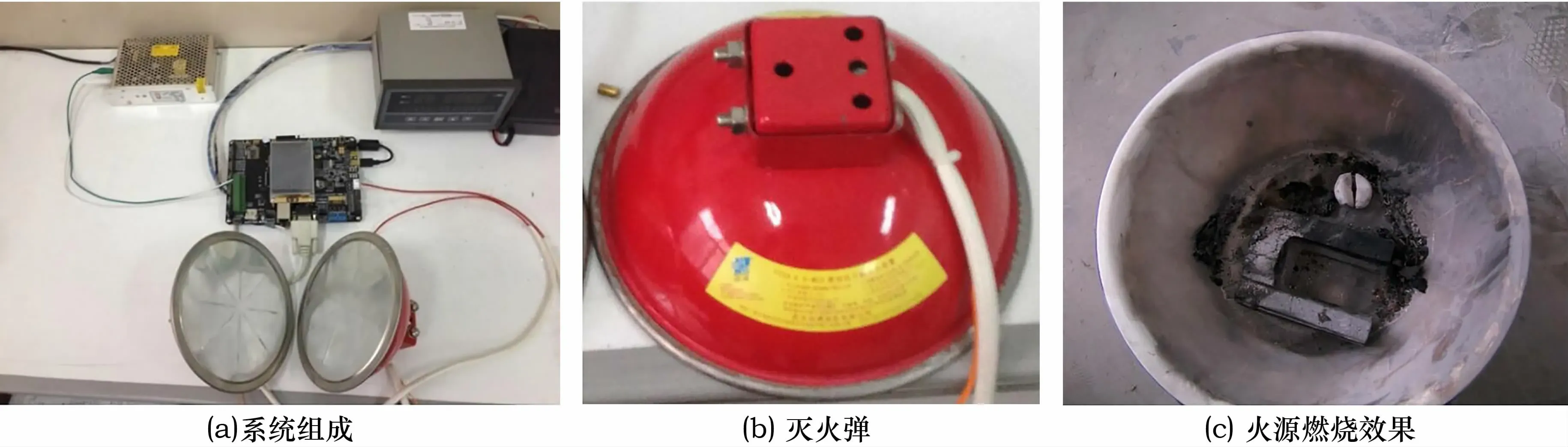
圖11 滅火實驗
滅火系統將傳感器1放置于火源正上方30cm處,傳感器2、3放置于傳感器1左側30cm處,傳感器4、5、6放置于傳感器1右側30cm處,如圖12所示。
2.2.2 實驗結果與分析
放火實驗結果如圖13所示,不難得出,實際發生火災時,火源的熱釋放速率曲線呈現火災初期、發展、最大和衰退4個階段的發展規律。由于車載電池艙環境相對密封、火源增長速度極快,本文模擬火源在7~10s之內就達到了最高溫度值,其后續火勢發展取決于燃料的供給,若燃料供給充足,則火焰會持續下去;若燃料有限,則隨著燃料耗盡,車載電池艙環境溫度會逐漸減低,火源會轉變為中火,甚至小火,正對火源的溫度傳感器溫度上升速率最快。
貝葉斯網絡中,煙霧濃度是其中的觀測變量,通過監測煙霧濃度變化規律,設置煙霧變化閾值,用于最終貝葉斯網絡決策。圖14中,實測火災實驗過程中煙霧濃度變化分為3個階段:火災前期,出現少量煙霧,0~6.5s,煙霧濃度呈上升趨勢,從0上升至800ppm;火災中期,燃料充足,煙霧濃度降低,6.5~20s,煙霧濃度呈下降趨勢,從800ppm下降至100ppm,并在100ppm和200ppm之間波動;火災后期,隨著燃燒物耗盡,出現大量煙霧,煙霧濃度迅速上升,從200ppm上升至1800ppm。
2.3 貝葉斯網絡結果分析
2.3.1 實驗結果分析
采集100組實際著火數據繼續分析,相關結果如圖15所示。
根據圖16分析可得,實際著火時,火災發生的概率位于0.6~0.8的組數為90組,概率大于0.8的組數為6組,在0.5~0.6之間的組數為4組。從而可知正確報出火災的次數為96組,存在4組誤判,識別率達到96%。
2.3.2 傳感器失效
考慮到傳感器存在失效情況,實驗分別將溫度傳感器1~6,以及煙霧傳感器依次放在車載電池艙外后,進行著火分析,其正確識別率結果見表1。

圖12 傳感器布局圖
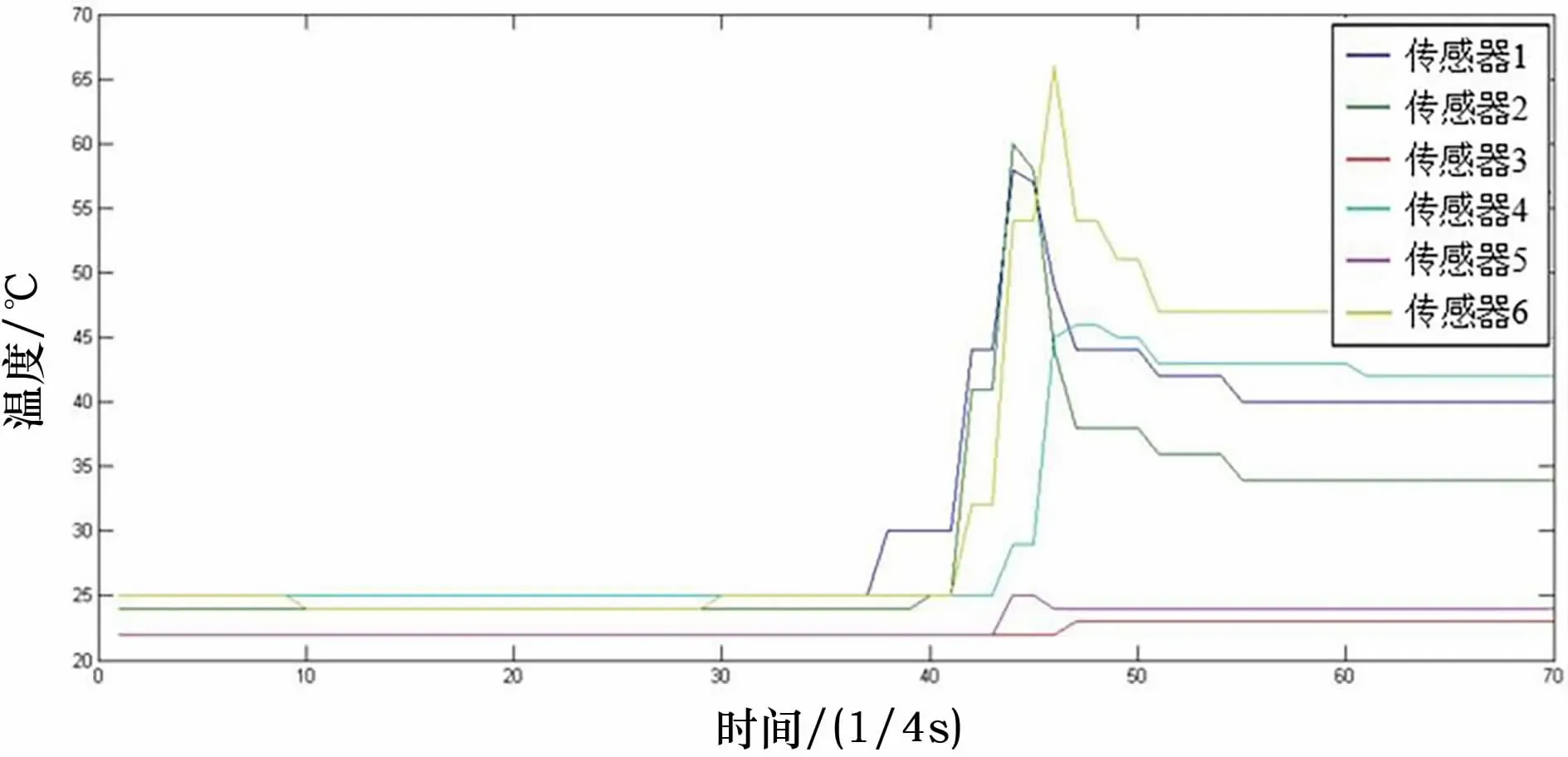
圖13 傳感器溫度變化圖
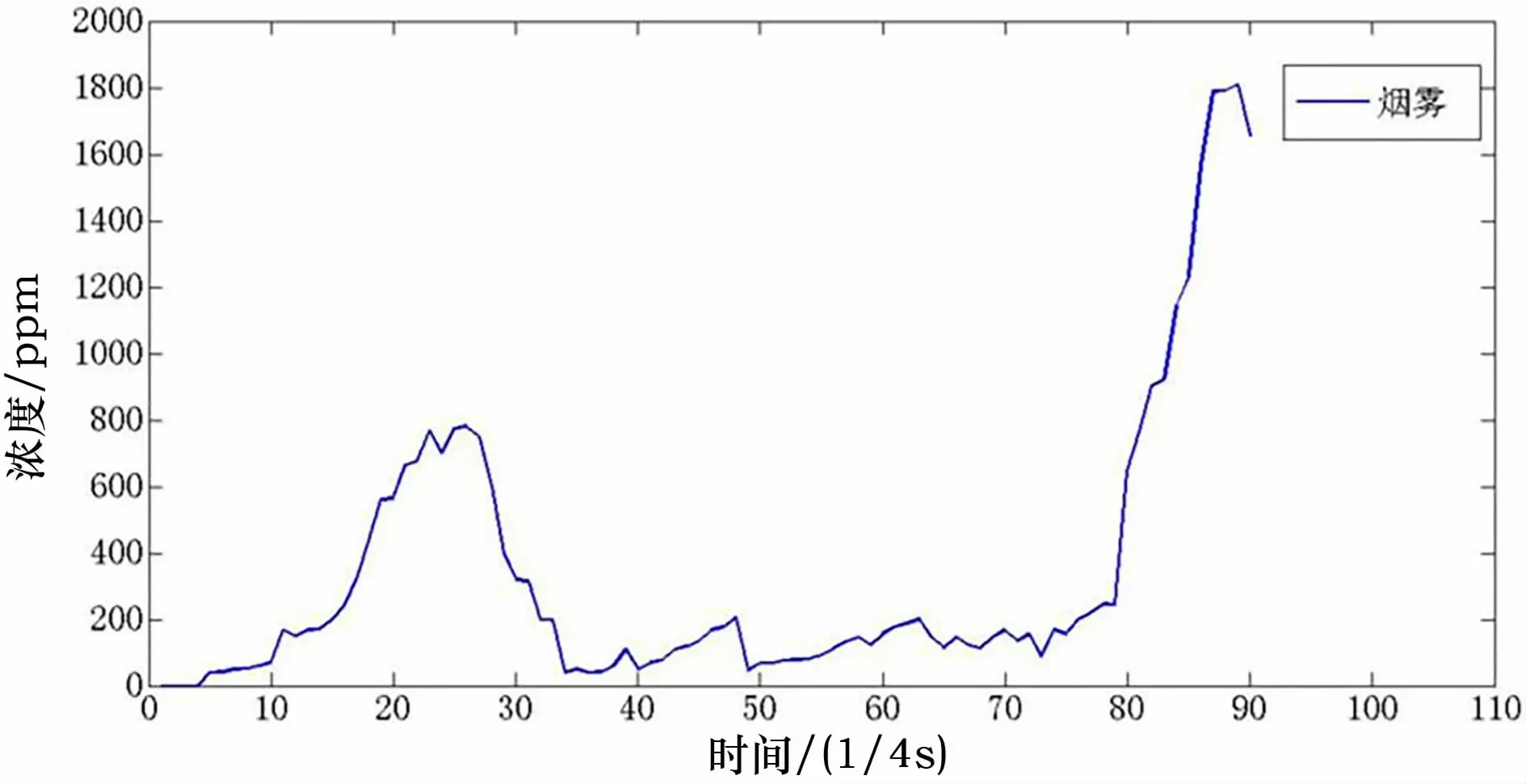
圖14 煙霧濃度變化圖
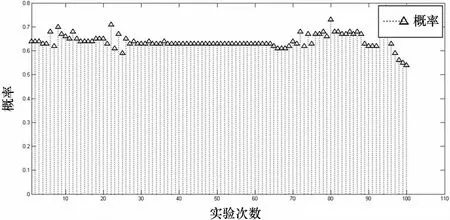
圖15 著火概率圖
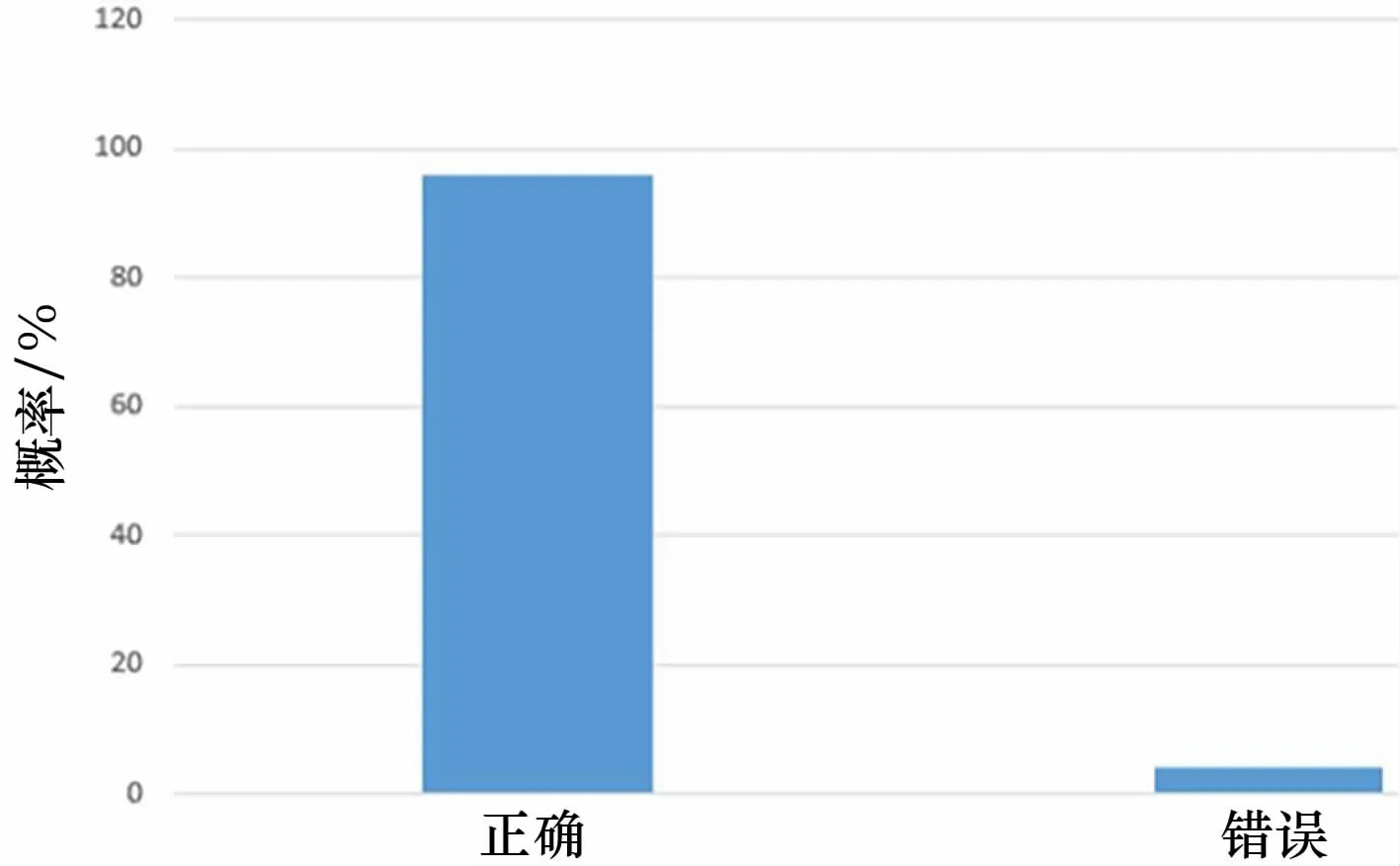
圖16 火災識別結果
3 結論
本文設計了多傳感器融合車載電池艙滅火方法,通過綜合采用溫度傳感器、煙霧傳感器實現對火災的實時監控,本文提出的火災識別模型正確識別率達到96%,在單一傳感器失效時仍可具備良好的火災辨識能力。
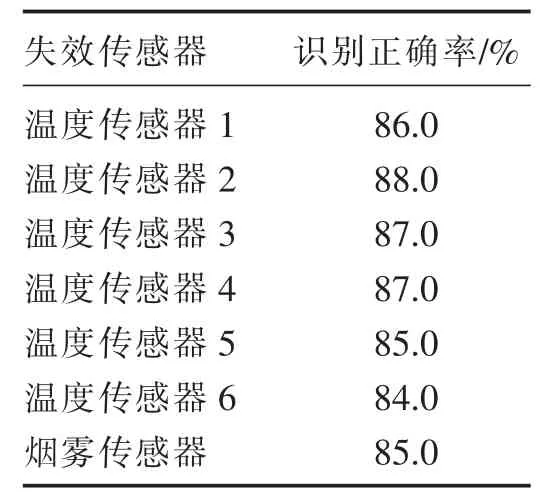
表1 傳感器失效正確識別率