談整車網絡架構設計對整車電氣系統的影響
2021-03-05 07:12:10靳玉潔
汽車電器 2021年2期
汪 暉, 靳玉潔
(東風商用車技術中心, 湖北 武漢 430056)
隨著電子技術的迅速發展及在汽車上的廣泛應用,汽車電子化程度越來越高,特別是微控制器進入汽車控制領域,提高了汽車控制的人性化和智能化程度。為了提高信號的利用率,要求大批的數據信息能在不同的電子單元中共享,汽車控制系統中大量的控制信號也需要實時交換,保證整車電氣系統的正常工作、整車的安全運行。
CAN總線是一種多主方式的串行通信總線,基本設計規范要求有高的位速率,高抗電子干擾性,并且能夠檢測出產生的任何錯誤。下文就整車網絡架構談談其設計方案及對整車電氣系統的影響。
1 整車網絡架構的設計原則和網絡拓撲形式[1-2]
整車網絡架構在整車電氣系統設計中占有非常重要的地位,它對整車的安全性有很大的影響,因此在設計初期需要對整車控制系統的CAN通道進行統一規劃和設計。其設計原則是:影響整車安全的控制系統建議在一路CAN通道上;承擔網關作用的控制器對于接收和發送的通信信號要有過濾和選擇;終端電阻布置要結合整車控制特性綜合考慮;各路總線負載率建議不超過50%。
終端電阻的解釋是:線性總線的每一個主網絡必須以一個合適的電阻來結束,以提供CAN_H和CAN_L導線的正確結束點。該終端電阻應連接在CAN_H和CAN_L導線之間。該終端電阻應符合以下特性:符號RL,最小值110Ω,額定值120Ω,最大值130Ω。
根據整車總線上終端電阻的設計方式不同,整車網絡拓撲可采用如下3種方式。
1) 在線路前后端各有1個終端電阻,即Rl+Rl,如圖1所示。
2) 控制器內置電阻+線路終端電阻,如圖2所示。
3) A控制器內置電阻+B控制器內置電阻,如圖3所示。
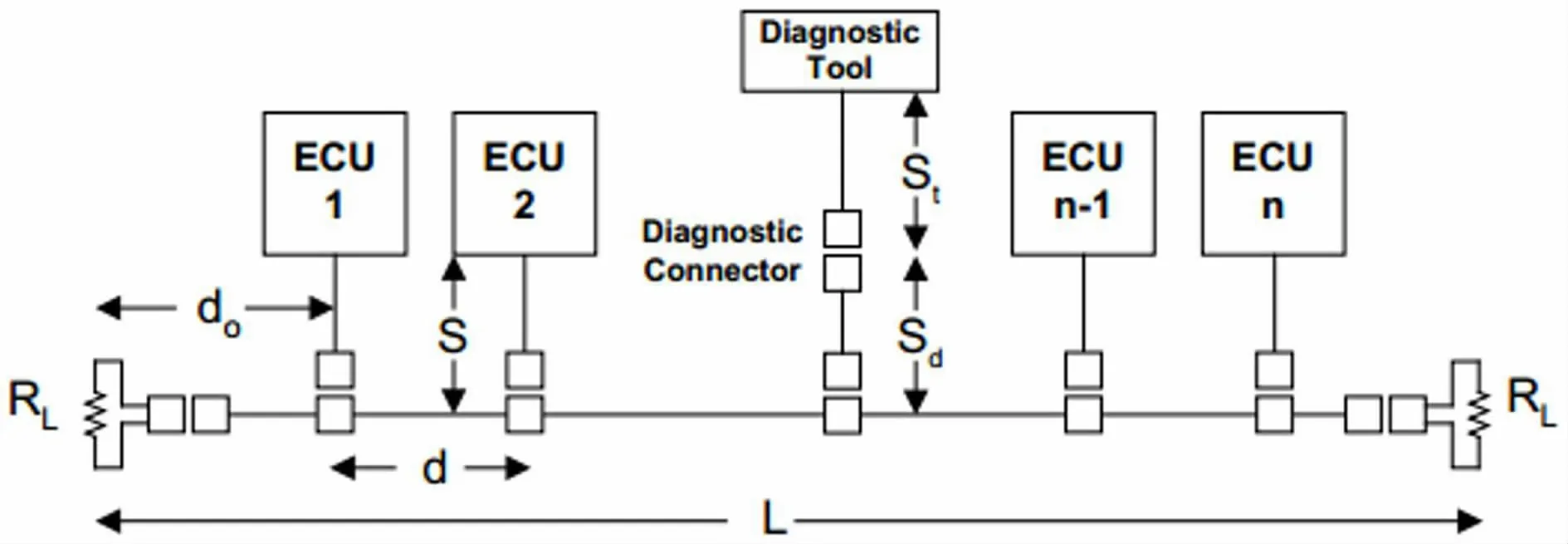
圖1 在線路前后端各有1個終端電阻
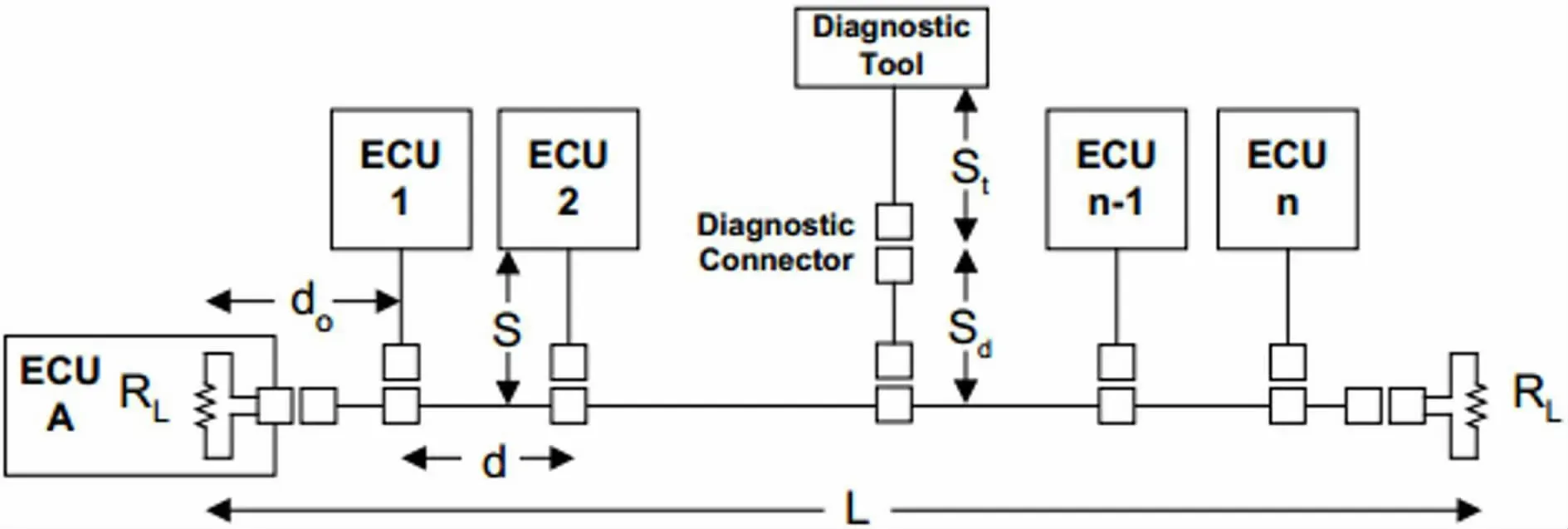
圖2 控制器內置電阻+線路終端電阻

圖3 A控制器內置電阻+B控制器內置電阻
2 整車網絡架構及風險預估
2.1 案例1
圖4是2019年東風雙燃料電池展車的網絡架構。該車電氣系統有:整車控制器HCU、動力電池 (電源管理系統BMS+配電盒)、氫燃料電池 (控制器FCU、配電盒)、高壓配電盒HCCB、水冷機組(動力電池用)、三合一控制器、轉向泵、空壓機、驅動電機MCU、冷卻系統ATS (電機用)、自動變速器TCU、換擋控制器SCU、DC/AC (高壓輸出)、空調、暖風、中控鎖、氣喇叭、電喇叭、轉向語音報警器、電動門窗、多功能蜂鳴器、綜合報警器、監控系統、行駛記錄儀、收放機、日行燈、ABS (4通道)、DC/DC (24V轉12V輸出)。
整車設計3路CAN。
1) CAN1是車身CAN,傳遞駕駛室的相關信息。該路上的系統有ABS控制器、自動變速器TCU、電機冷卻系統ATS、儀表等。
2) CAN2是動力CAN,將布置在車架上的BMS (電源管理)、水冷機組、FCU (燃料電池控制單元)、HTCU (燃料電池車載供氫控制單元)、RDC (燃料電池監控)、三合一控制器、HCCB (高壓配電盒)、DC/AC (灑水上裝用逆變器)、DC/DC (低壓逆變器)、行駛記錄儀等設計在此路CAN通道上。
3) CAN3是TCU的子網。TCU管理手柄控制器和MCU的控制。
整車控制器作為網關,承擔CAN1、CAN2通道上的信息接收和發送。
風險預估:為防止CAN1負載率高,需要梳理該通道上的各系統接收和發送的具體報文(信號值有效范圍、周期、信號關系、報文序列等)。未梳理前的總線負載率在45%左右,梳理后的總線負載率在40%左右。

圖4 2019年東風雙燃料電池展車的網絡架構
2.2 案例2
圖5是2019年東風智能駕駛純電動展車的網絡架構。該車電氣系統有:無人駕駛控制單元ADU、整車控制器HCU、動力電池管理系統BMS、驅動電機PCM、驅動控制單元PDU、左輪模塊、右輪模塊、冷卻系統、充電插座、高壓配電盒、三合一控制器(控制DC/DC、電動轉向油泵、電動空壓機)、電液轉向器(電動轉向油泵用)、DC/DC (高壓/低壓輸出)、EPB (電子手制動)、EBS+ESC、車身中央控制單元BCM、門鎖控制模塊DCM、ECAS、360影像、胎壓監測TPMS、中控主機 (控制2個大屏和儀表)、T-BOX、DC/DC(12V)、中央網關、轉向語音報警器、空調等。
整車共設計12 路CAN。其中網關管理了4 路CAN:CAN1、CAN2、CAN3、CAN4。
1) CAN1:動力CAN,用于發送和接收車輛動力信息。將三合一控制器、整車控制器HCU設計在此CAN通道上。HCU外置120Ω終端電阻。
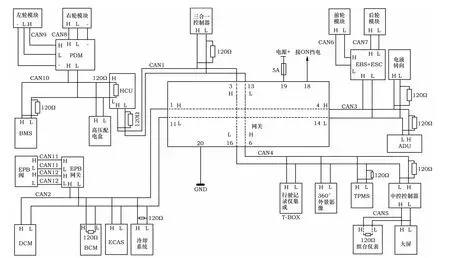
圖5 2019年東風智能駕駛純電動展車的網絡架構
2) CAN2:車身CAN,用于駕駛室內控制系統的信息傳送。此通道上有門鎖控制模塊DCM、車身中央控制模塊BCM、空氣懸架ECAS、冷卻系統。BCM內置120Ω終端電阻。
3) CAN3:用于EBS+ESC系統、電液轉向系統、無人駕駛系統智能控制器ADS等的信息交互。此CAN通道速率設計為500kb/s。
4) CAN4:行駛記錄儀、360°全景影像、胎壓監測系統TPMS、中控的信息交互通道。
5) CAN5是中控控制器的子網,用于中控控制器和組合儀表、大屏的信息交互。
6) CAN6、CAN7是EBS+ESC系統的子網。CAN6用于EBS+ESC管理前橋模塊的動作。CAN7用于EBS+ESC管理后橋模塊的動作。
7) CAN8、CAN9是PDM (電驅橋) 的子網。CAN8用于PDM (電驅橋) 管理右輪模塊的驅動方式。CAN9用于PDM(電驅橋) 管理左輪模塊的驅動方式。
8) CAN10是HCU的子網。CAN10用于整車控制器HCU管理電源管理系統BMS、高壓配電盒、電驅橋PDM等系統的控制。
9) CAN11、CAN12 是 電 子 手 制 動EPB 網 關 的 子 網。CAN11、CAN12用于電子手制動EPB網關管理EPB閥的控制。
風險預估:該車電控系統較多,對網關特性和安全要求高,網關應就服務端安全性(防DOS攻擊、網絡攻擊和虛假信息等)、設備端安全性 (防篡改、CAN接口權限、系統提取、本地證書或數據獲取等)、性能指標安全 (惡意攻擊頻率、響應指標等) 這些方面進行考慮,提高可靠性。再有,自動駕駛與駕駛員優先的交錯控制,對于整車網絡拓撲也是有影響的。

圖6 東風康明斯發動機的網絡架構
3 整車網絡架構對整車電氣系統的影響[2-3]
整車網絡拓撲可以分3步進行:初期規劃,中期通信測試,后期維護架構。
3.1 初期規劃
圖6是東風康明斯發動機的網絡架構,設計有7路CAN,分別是動力CAN1、舒適CAN2、診斷CNA3。
1) 動力CAN1,與汽車動力性相關的控制系統均在此通道上傳送信息。相關系統有發動機EECU、ABS、AMT、SCU換擋控制器、安全氣囊Airbag、EBS、ESC、儀表、行駛記錄儀、T-BOX、上裝控制器BBM。
2) 舒適CAN2,在此通道上接收和發送信息的有儀表、多功能顯示屏、車身中央控制單元BCM、胎壓監測TPMS、暖風空調、門鎖控制模塊DCM、前方道路預警LDWS、270°影像、疲勞駕駛預警、駐車空調、倒車影像等。
3) 診斷CAN3,用于車輛下線EOL標定及車輛數據上傳。目前T-BOX和發動機EECU在這路CAN上傳送數據。
4) CAN4是EECU的子網,用于管理國VI后處理。
5) CAN5是EBS的子網,管理ESC、SAS、RA等控制方式。
6) CAN6是EBS的另一個子網,管理后橋模塊的控制方式。
7) CAN7是AEBS的子網,管理雷達和攝像頭的控制方式。
行駛記錄儀、T-BOX、儀表等控制器,在本網絡架構中對這些控制系統采用2路CAN設計,可以做信息轉發。
3.2 通信測試
3.2.1 案例1
通過對整車網絡測試,排查出康明斯國VI電控系統通信協議文檔有漏項。
1) 測試過程 進行整車CAN網絡測試,在動力CAN總線上采集到發動機EECU 發送報文0x19FFEF00、0x18FC4E00、0x18FC4D00、0x18FC5700,但通信協議文檔和SAE J1939協議均未對上述報文進行定義。
2) 排查分析 0x19FFEF00是私有報文、0x18FC4E00用于廣播后處理1尿素噴射壓力信息、0x18FC4D00用于廣播后處理2尿素噴射壓力信息、0x18FC5700用于廣播尿素液位空的時間和尿素質量低故障的時間。
3) 最終結果 康明斯完善通信協議文檔。
3.2.2 案例2
通過對整車網絡測試,排查出儀表軟件策略缺陷。
1) 測試過程 點火鑰匙先在LOCK擋,然后將點火鎖旋到ACC擋,通過CANoe工具采集整個過程報文信號數據,發現PCAN上存在2條異常報文。
2) 排查分析 這2條異常報文是來自車身CAN上的車身中央控制器BCM發送的,儀表負責轉發。但點火鎖在ACC擋時儀表此時尚未上電, 此時儀表不應該存在轉發報文情況,儀表只有在接收到ON擋信號時才開始工作。
3) 最終結果 更改儀表轉發報文規則,僅在點火鑰匙在ON擋時執行轉發。
3.2.3 案例3
通過對車身中央控制器BCM的功能檢測,排查出其軟件策略缺陷。
1) 測試過程 點火鎖鑰匙打到ON擋/ACC擋時,接通洗滌器開關,洗滌電機開始工作,刮水電機低速擋輸出,刮水器低速工作。
洗滌開關保持接通,將點火鑰匙旋到OFF擋,此時刮水電機停止工作,但洗滌電機仍在工作。再按下洗滌開關使其斷開,洗滌電機仍然工作。只有斷開電源總開關后洗滌電機方停止。但是再次接通電源總開關,洗滌電機仍工作,只有將點火鎖置于ACC擋,洗滌電機才能停止工作。
2) 排查分析 車身中央控制器BCM的軟件策略沒有包含點火鎖開關位置狀態、電源總開關狀態作為退出條件。
3) 最終結果 更改車身中央控制器BCM的軟件策略,將洗滌電機的退出條件包含有點火鎖開關位置狀態、電源總開關狀態。
3.2.4 案例4
通過對車身中央控制器BCM的功能檢測,排查出其軟件策略缺陷。
1) 測試過程 電源總開關接通,點火鑰匙旋到ON擋/ACC擋,按下接通洗滌開關,此時洗滌器和刮水電機均開始工作。點火鎖置于START擋時,刮水電機停止工作,但洗滌電機仍繼續工作。
2) 排查分析 洗滌電機沒有把ST擋作為退出條件。
3) 最終結果 更改車身中央控制器BCM的軟件策略,將點火鑰匙ST擋作為洗滌電機的退出條件。
3.2.5 案例5
通過測試國VI數據上傳的功能,排查出儀表車速參數定義問題。
1) 測試過程 車輛點火鎖ON擋,未啟動發動機,查看上傳平臺的發動機數據信息,發現平臺顯示車輛車速0.25km/h,采集總線車速值為0。
2) 排查分析 程序中車速參數定義未初始化,導致變量未賦值之前存在一個默認值。計算后有一個很小的車速。
3) 最終結果 對儀表車速參數變量進行初始化。
3.3 維護架構
通過整車網絡測試,更改CAN通道上的控制系統的用電及軟件策略后,進入架構維護階段,編制整車通信文檔,明確各控制器的發送和接收信息,對于顯示故障按照嚴重度劃分,重度故障必須有故障信息指示,中度或輕度故障可以由服務人員通過診斷儀來獲取信息,以免造成車輛使用者在使用中的不適感。
4 結束語
整車網絡拓撲設計影響整車電氣系統的正常工作,也影響整車的安全性。反過來,利用整車網絡,也可以反推整車各系統的控制策略、配電設計等是否合理合規,進而提高和改善整車安全性能,這是相輔相成的關系。