紅外穩定平臺裝調誤差對視線角速度的影響分析
2021-03-06 02:47:36付奎生丁海山
紅外技術 2021年2期
陳 爭,付奎生,2,丁海山
系統與設計〉
紅外穩定平臺裝調誤差對視線角速度的影響分析
陳 爭1,付奎生1,2,丁海山1
(1. 中國空空導彈研究院,河南 洛陽 471009;2. 航空制導武器航空科技重點實驗室,河南 洛陽 471009)
框架式穩定平臺中的裝調誤差影響視線角速度的測量精度。給出了框架軸系偏差的數學描述,在此基礎上研究了軸系偏差和陀螺敏感軸交叉耦合情況下三自由度框架式紅外穩定平臺對視線角速度的計算方法。并比較了這兩類裝調誤差對視線角速度測量精度影響的大小。仿真結果表明,通過對裝調誤差補償,視線角速度的測量精度可顯著改善。所得結果對新型框架式穩定平臺系統的誤差指標分配具有重要的參考價值。
穩定平臺;裝調誤差;框架軸系;視線角速度
0 引言
框架式穩定平臺系統近年來發展迅速,廣泛應用于飛行器上的目標探測系統、精確制導武器的導引系統等。三自由度框架式紅外穩定平臺實現慣性空間穩定和對目標跟蹤的同時,還可以直接測量制導系統所需的視線角速度信息[1]。三自由度穩定平臺在結構上由3個單軸運動框架復合而成,機械裝配中產生的裝調誤差造成框架軸系偏差[2-3]、紅外探測器位姿偏差以及陀螺敏感軸的交叉耦合[4-5],使得基座角運動的耦合更加復雜[6],對測量視線角速度帶來不利的影響。
文獻[7]研究了僅陀螺敏感軸交叉耦合情況下視線角速度的計算。所得結果是在框架軸系正交的假設下得到的。而實際系統中框架的裝配必然會存在一定裝調誤差。本文系統研究了框架、陀螺和紅外探測器均存在裝調誤差時,三自由度框架式紅外視線角速度的計算方法,建立基于三軸穩定平臺的軸系偏差的數學模型,分析了裝調誤差對視線角速度計算的影響,并進行仿真驗證。
1 穩定平臺系統
三自由度框架式紅外穩定平臺系統的示意圖如圖1。圖中,-bbb表示載體坐標系。載體坐標系的原點取為穩定平臺回轉中心且坐標系和載體固連。
框架式紅外穩定平臺系統一般將探測成像系統和速率陀螺安裝在穩定平臺上,穩定平臺固定在內環框架上,成為內環框架的負載。內環框架和穩定平臺組成內環本體組合,通過內環框架轉軸固定在中環框架上,成為中環框架的負載。中環框架和內環本體組合通過中環框架轉軸固定在外環框架上,成為外環框架的負載。外環框架轉軸架固定在紅外穩定平臺的載體上。外環框架相對載體可以做滾轉運動;外環框架處于零位時,中環框架相對載體可以做偏航運動;外環框架和中環框架處于零位時,內環框架相對載體可以做俯仰運動。通過內環、中環、外環3個框架的運動合成,可以實現穩定平臺在慣性空間中繞回轉中心轉動。
2 軸系偏差建模
針對三自由度紅外穩定平臺的結構特點,除了前面定義的載體坐標系-bbb,再建立外環坐標系-ooo、中環坐標系-mmm、平臺坐標系-ppp和探測坐標系-ddd。這4個坐標系原點均為穩定平臺回轉中心,其中,外環坐標系軸和外環框架轉軸固連;中環坐標系軸與中環框架轉軸固連;平臺坐標系軸和內環框架轉軸固連;探測坐標系和探測器光敏面固連,其軸對應光敏面的中垂線(即探測成像系統光軸),軸和軸分別對應探測器光敏面的行和列。
在設計的理想狀態下,探測成像系統光軸與內環框架轉軸、內環框架轉軸與中環框架轉軸、中環框架轉軸與外環框架轉軸應分別正交,而外環框架轉軸和載體縱軸完全重合。探測坐標系和平臺坐標系重合且各框架處于零位時,4個坐標系和載體坐標系重合。記外環框架角為w,中環框架角為z,內環框架角為n,角度正負按右手規則確定,那么各坐標系相互間的變換關系如圖2所示。
實際裝配時,框架軸系不可能做到零誤差。本文描述軸系裝調誤差的參數為1、1、2、2、3、3、4、4和4。其中,1為外環框架轉軸在載體坐標系面的投影與載體系軸的夾角;1為外環框架轉軸與載體系面的夾角;2為中環框架轉軸在外環坐標系面的投影與外環系軸的夾角;2為中環框架轉軸與載體系面的夾角;3為內環框架轉軸在中環坐標系面的投影與中環系軸的夾角;3為內環框架轉軸與中環系3面的夾角;4為探測器光敏面中垂線在平臺系面的投影與平臺系軸的夾角;4為光敏面中垂線與平臺系面的夾角;4和4、4一起構成一組平臺系到探測系的歐拉角。角度正負號按右手規則確定。當這些裝調誤差存在時,各坐標系相互間的變換關系如圖3所示。

圖3 框架軸系偏差時各坐標系之間的變換關系
3 視線角速度的計算






對于三自由度框架式紅外穩定平臺系統,穩定平臺上正交安裝了偏航/俯仰陀螺分別測量平臺相對慣性空間的偏航/俯仰角速度;外環框架上安裝有外環陀螺,可以測量外框架相對慣性空間的滾轉角速度。理想情況下,穩定平臺偏航/俯仰陀螺的敏感軸分別平行于平臺坐標系的軸和軸,外環陀螺敏感軸與外環坐標系軸平行。這里仍用第2章軸系偏差建模的方法描述陀螺的裝配誤差,記誤差參數為5、5、6、6、7、7。其中,5為外環陀螺敏感軸在外環系面的投影與外環系軸的夾角;5為外環陀螺敏感軸與外環系面的夾角;6為中環陀螺敏感軸在平臺系面的投影與平臺系軸的夾角;6為中環陀螺敏感軸與平臺系面的夾角;7為內環陀螺敏感軸在平臺系面的投影與平臺系軸的夾角;7為內環陀螺敏感軸與平臺系面的夾角。角度正負號按右手規則確定。那么在考慮軸系偏差情形下,陀螺的輸出和外、中、內環框架的角速度滿足下式:

將式(3)代入式(2),得到視線角速度在探測坐標系中的測量計算公式為:

最后將其按圖3的坐標變換關系可得視線角速度在載體系中的測量計算公式為:

當各誤差參數都取零時,式(4)即蛻化成:

將其坐標變換到載體系可得:

也即理想情況下,三自由度框架式紅外穩定平臺系統穩定跟蹤目標時,穩定平臺上正交安裝的偏航/俯仰陀螺可以直接測量出視線角速度。特別當框架軸系誤差參數取零時,式(4)即蛻化成文獻[7]中的結果。因此,式(4)也可以認為是對裝調誤差進行補償,而且較文獻[7]中的結果更具有一般性。
4 仿真分析

圖4 陀螺的輸出
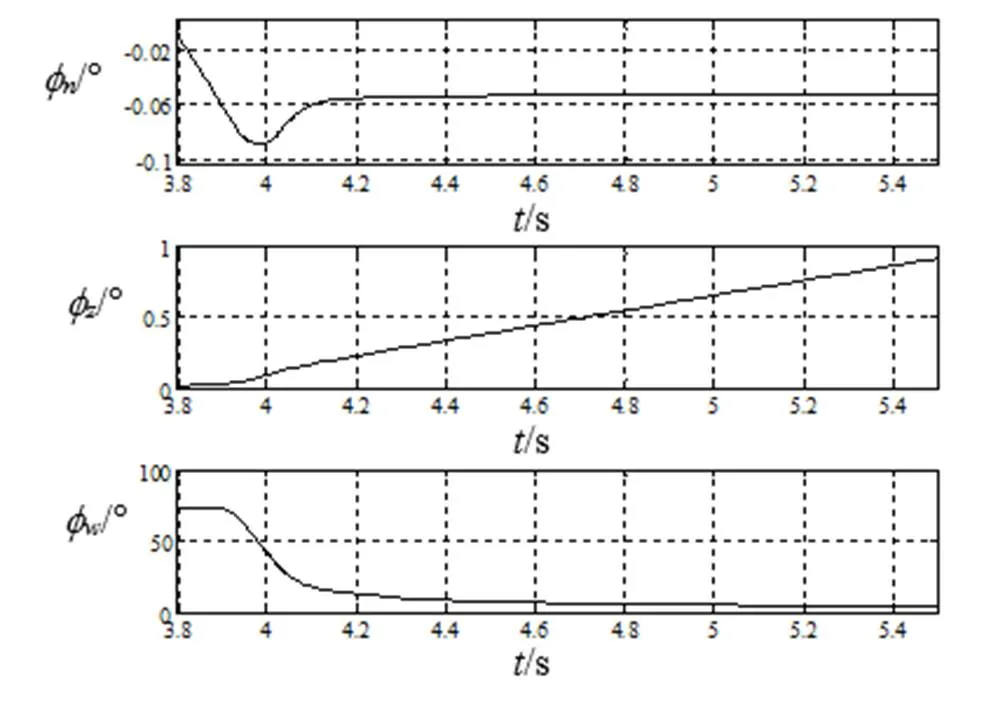
圖5 框架角曲線

表1 裝調誤差參數設置
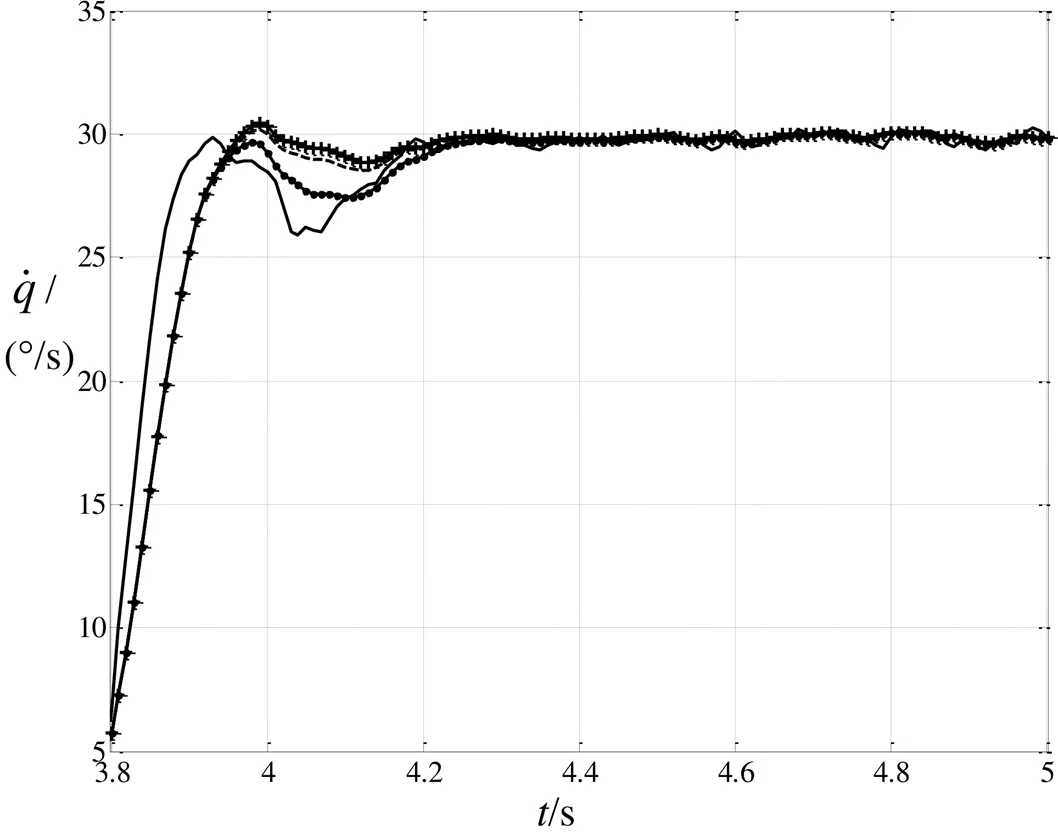
圖6 仿真結果比較圖

圖7 仿真結果比較(局部放大)
仿真試驗結果表明,對裝調誤差進行補償,可以提高視線角速度測量的精度。忽略裝調誤差時,測量計算的視線角速度較理論值最大偏差為4.08°/s;僅對框架軸系誤差補償時,視線角速度最大偏差減小到2.53°/s;僅對陀螺安裝誤差時,視線角速度最大偏差減小到1.49°/s;綜合考慮各裝調誤差進行補償,視線角速度最大偏差進一步減小到1.18°/s。總體來看,陀螺敏感軸交叉耦合對視線角速度精度的影響較框架軸系誤差更顯著。
5 結論
本文系統研究了框架和陀螺均存在裝調誤差時,三自由度框架式紅外視線角速度的計算方法,并進行仿真分析。結果表明,在計算視線角速度時如果對誤差進行補償,可以提高視線角速度的測量精度。在提高線角速度測量精度方面,補償陀螺敏感軸交叉耦合的效果比補償框架軸系偏差更顯著。所以陀螺敏感軸交叉耦合對視線角速度的影響在各裝調誤差中最大。此結果對新型框架式穩定平臺系統總體設計時的誤差指標分配有重要的參考價值。
[1] 張平, 董小萌, 付奎生, 等. 機載/彈載視覺導引穩定平臺的建模與控制[M]. 北京: 國防工業出版社, 2011.
ZHANG Ping, DONG Xiaomeng, FU Kuisheng, et al.[M]. Beijing: National defense industry press, 2011.
[2] 王濤, 朱明超, 訚勝利, 等. 穩定平臺軸系精度對視軸指向誤差的影響分析[J]. 紅外與激光工程, 2011, 40(11): 2265-2269.
WANG Tao, ZHU Mingchao, YIN Shengli, et al. Analysis of LOS pointing error derived from precision of shafting in stabilization mechanism[J]., 2011, 40(11): 2265-2269.
[3] 李巖, 范大鵬. 視軸穩定平臺的裝配誤差機理分析與仿真[J]. 中國慣性技術學報, 2007, 15(1): 35-38.
LI Yan, FAN Dapeng. Analysis and simulation on assembling-error mechanism for gyro-stabilization platform[J]., 2007, 15(1): 35-38.
[4] 李巖, 張智永, 范大鵬. 陀螺安裝誤差影響視軸穩定平臺精度的機理研究[J]. 光電工程, 2007, 34(9): 10-15, 29.
LI Yan, ZHANG Zhiyong, FAN Dapeng. Principle of the effect of gyro misalignment on the stabilization platforms accuracy[J]., 2007, 34(9): 10-15, 29.
[5] 付奎生, 孟衛華. 三軸穩定跟蹤平臺旋轉耦合問題的分析與改進[J]. 航空兵器, 2010(4): 7-9.
FU Kuisheng, MENG Weihua. Analysis and improvement of channels coupling problem of three-axis stabilized and tracking platform[J]., 2010(4): 7-9.
[6] 張延順, 朱如意, 房建成. 航空遙感用慣性穩定平臺動力學耦合分析[J].中國慣性技術學報, 2011, 19(5): 505-509.
ZHANG Yanshun, ZHU Ruyi, FANG Jiancheng. Analysis on dynamics coupling of inertial stabilized platform for aerial remote sensing[J]., 2011, 19(5): 505-509.
[7] 熊偉, 丁海山, 付奎生. 陀螺敏感軸交叉耦合對視線角速度的影響分析[J]. 計測技術, 2012, 35(5): 8-12.
XIONG Wei, DING Haishan, FU Kuisheng. Analysis of influence of the cross sensitive axes on the angular rate of stabilized platform[J]., 2012, 35(5): 8-12.
Analysis of the Influence of Installation Errors of an Infrared Stabilized Platform on Line-of-sight Angular Velocity
CHEN Zheng1,FU Kuisheng1,2,DING Haishan1
(1.,471009,;2.,471009,)
Installation errors of a stabilized platform with a frame structure affect the calculation accuracy of the line-of-sight (LOS) angular velocity. Mathematical descriptions for the axis system deviation of frames are given. Based on these, calculation methods for a three degree- of-freedom infrared stabilized platform are studied under the conditions of axis system deviation and cross coupling of sensitive axes of gyros. The influences on the measuring accuracy of LOS angular velocity caused by these two kinds of installation errors are compared. It is shown by simulation results that compensating for installation errors can effectively improve the measuring accuracy of LOS angular velocity. The results are important for error index decomposition for the design of a late-model-stabilized platform with a frame structure.
stabilized platform, installation error, axis system, LOS angular velocity
TJ765.3
A
1001-8891(2021)02-0110-06
2020-06-11;
2021-01-25.
陳爭(1985-),男,工程師,碩士,主要研究方向為穩定平臺式紅外目標位標器總體設計。E-mail:water5218@qq.com。
中國空空導彈研究院創新基金(CKJ0000)。
