虛擬仿真技術在機器人生產線設計中的應用
2021-03-06 09:46:30郝建豹曹銀華譚華旭林子其
廣東科技 2021年2期
文/郝建豹 曹銀華 譚華旭 林子其
[導語]
虛擬仿真技術(virtual reality,VR)是中國制造業轉型升級不可或缺的支撐技術。本文介紹了國內外虛擬仿真軟件適用情況,闡述了基于RobotStudio在機械加工、小家電加工、陶瓷產品生產、硯臺生產的虛擬仿真生產線案例,以及基于TECNOMATIX構建的智能制造虛擬仿真生產線,同時對廣東交通職業技術學院基于虛擬仿真建設的工業4.0智能制造生產線的架構、工序等情況進行了詳細說明,最后對虛擬仿真技術的發展進行了展望。
隨著工業機器人技術、智能控制技術、網絡技術的發展,以及勞動力短缺、用工成本的提升,建設并應用基于多工業機器人的自動化生產線已成為一種趨勢。但目前企業設計或升級機器人生產線時,通常根據已有工藝流程、設備參數、生產效率等生產要素,采取從底層往頂層反推的方法進行設計,忽略了各生產要素之間生產流程的銜接問題,最終導致設備布局不合理及設計生產線的目標缺乏數據依托。
機器人自動化生產線尤其是目前提出的工業4.0智能化生產線建設普遍存在資金投入大、生產線規劃比較困難、生產工藝復雜、現場調試工作量大以及工藝及制造流程、生產目標評估困難等問題。虛擬仿真技術,就是用一個具有多源信息融合的交互式三維動態實景和實體行為的計算機系統模仿另一個真實系統的技術。利用機器人生產線的虛擬仿真,可在頂層設計時驗證生產線規劃方案的可行性,在仿真環境中進一步完成生產線的規劃,并通過動態模擬生產線的運行過程預測生產線的運行狀態,驗證設備布局的合理性,分析設備利用率、預測生產目標、評估生產效率,并為實體生產線的具體實施、運行、優化等提供依據。
虛擬仿真軟件發展現狀分析
虛擬仿真技術經歷了實物和物理效應仿真階段、模擬仿真階段。數字仿真階段和虛擬仿真階段,國外在虛擬仿真技術研究方面起步于20世紀80年代,并逐步研發出適用于機器人及其生產線的仿真軟件,如德國 KUKA機器人的SimPro、 Siemens的Tecnomatix,瑞典 ABB 機器人 的RobotStudio,日 本YASKAWA機 器 人 的MotoSim EG、FANUC 機器人的 RoboGuide,法國達索的DELMIA,加拿大的Robot Master及RoboDK,意 大利的Robomove等。這些仿真軟件中大多支持多品牌機器人仿真,其中僅支持單個工作站離線編程與仿真的主要有Robot Master、SimPro等,適用于機器人生產線仿真的主要有Tecnomatix、RobotStudio等。
我國機器人仿真軟件起步較晚,目前還在快速發展中。其中,華航唯實的RobotArt可支持四大家族(ABB、KUKA、FANUC、YASKA WA)機器人、KEBA系列機器人以及國內品牌(如廣數機器人)等單工作站離線編程與仿真,暫不適用于多機器人生產線仿真。
基于RobotStudio軟件在機械加工等生產線仿真應用
RobotStudio仿真軟件是工業機器人生產商中開發比較完善的一款,可在Windows系統環境中離線快速生成路徑軌跡、路徑優化,并可進行軌跡跟蹤,生成的機器人RAPID程序可通過網絡或U盤直接下載到實際機器人系統中,可顯著縮短編程、調試時間;另外,該軟件還可以進行碰撞檢測、機器人TCP軌跡跟蹤以及運行情況的報警。但是該軟件三維建模功能有待進一步提升,復雜模型如機床等需要其他CAD 軟件(如SolidWorks、UG等)建成3D模型后再導入。
1.機械加工生產線中的仿真應用
機械加工生產線包含了機床上下料、裝配、檢測等工業機器人最常用的領域。圖1所示的機器人機械加工生產線,是一條集機器人機床上下料、裝配、裝箱于一體的虛擬仿真自動化生產線。機械加工仿真生產線主要有機器人上下料工作站(上下料機器人ABB IRB1410 1臺,加工中心2臺)、裝配工作站(機器人IRB9101臺)、裝箱工作站(IRB140機器人1臺)、供料工作站以及管理工作站等組成。構建生產線時首先利用SolidWorks等三維軟件設計好機器人上下料工作站及其他工作站的三維仿真模型;其次在RobotStudio軟件中創建工作站,導入建好的仿真模型到RobotStudio軟件中完成生產線布局工作,并設定工具坐標系、工件坐標系等關鍵數據,設置I/O信號,設計SMART組件;最后離線編制機器人程序等,可實現機器人生產線的仿真運行。
機械加工仿真生產線可完成復雜軸類零件的加工,和加工質量的檢測、機器人裝配、裝箱等;根據仿真時機器人和機床等設備的動作流程,對機器人和機床等模型進行動作設計及運動規劃,進一步根據設備設計的生產節拍要求調整機器人運動速度,使生產線各站生產節拍滿足設計要求;通過分析機器人運行速度、軌跡等仿真結果,最終得出優化設計方案。

圖1 機器人機械加工虛擬仿真生產線
2.小家電加工生產線中的仿真應用
小型家電加工工藝比較復雜,機器人在其中完成的功能較多。以熱水壺體部分生產為例,本文構建了熱水壺體自動化生產線虛擬仿真系統,主要由管理工作站、供料工作站、成型工作站、壓鑄工作站、焊接工作站、 AGV(aut omated guided vehicle)智能小車等組成,如圖2所示。
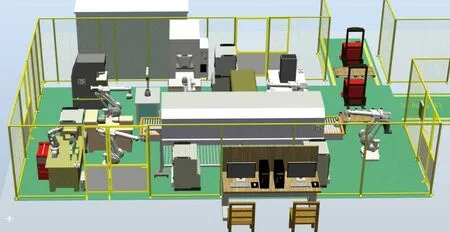
圖2 熱水壺體生產虛擬仿真生產線
壺體生產的數量由人工設定,啟動系統后,無需人工參與,經工業機器人及自動化裝置完成如取料、壺體成型、沖壓等一系列工序,加工好的壺體由AGV智能小車運到立體倉庫。
3.陶瓷產品生產線中的仿真應用
瓷器作為中國的象征與標志,在智能制造趨勢下也被賦予了新的生命與使命,通過“互聯網+”工業機器人和圖形圖像處理技術等,陶瓷制作可以滿足用戶的個性化需求,做到了私人定制,減少了大量人力費用。應用SolidWorks和RobotStudio軟件設計的陶瓷盤類虛擬仿真生產線,其仿真系統主要由真空供料和壓餅工作站、壓膜工作站、干燥工作站、打磨工作站、噴釉工作站、印章工作站、電燒窯等組成,如圖3所示。

圖3 陶瓷盤類虛擬仿真生產線
通過沖壓裝置對陶泥塑形,將以前的自然風干轉換為機器風干模式,使其更加符合現代高速發展的信息時代要求;通過機器人將模具取出,減少勞動力;通過雕刻、打磨、噴釉環節,可以將通過互聯網收集到的客戶的創意雕刻和色彩圖案經過數據化處理之后導入例行程序,生產出具有客戶個性化的現代藝術產品;最后通過印章、碼垛、燒制,生產出符合要求的產品。
4.硯臺制作生產線中的仿真應用
中國具有眾多的手工業,傳承 需要創新,硯臺制作便是其中之一。工業機器人既能把硯臺的傳統手工解放出來,又能傳承和延續硯臺的生命和使命,使硯臺的生產實現自動化,減輕人的勞動強度、減少粉塵等對人體的傷害。廣東交通職業技術學院學生科技創新作品——基于RobotStudio軟件的硯臺生產虛擬仿真生產線,獲得全國工業機器人虛擬仿真大賽一等獎。該仿真生產線由原石成型工作站、設計雕刻工作站、粗精打磨工作站、水洗上蠟工作站、碼盤入庫工作站等組成,具體如圖4所示。
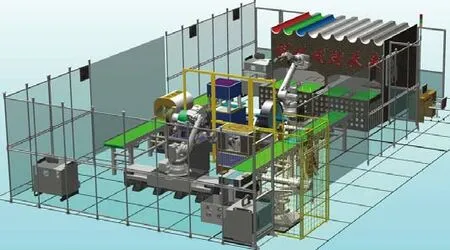
圖4 硯臺生產加工虛擬仿真生產線
其工藝流程為將粗糙的毛坯原石材按照工藝要求切割成符合要求的成型產品,并利用機器人進行雕刻,隨后進行整個硯臺的先粗后精打磨,接著將打磨后的硯臺放入水洗機進行自動噴水和自動搓洗,并將水洗好的硯臺放進打蠟機進行打蠟,最后通過機器人在硯臺表面加一層硬蠟,并將其送至產檢及包裝車間,從而完成整個加工流程。
基于TECNOMATIX在智能制造生產線中的仿真應用
西門子公司的TECNOMATIX是一個集基本工序操作、單個工作站、整條生產線、工廠等進行設計、仿真和優化的集成計算機環境,可實現工業機器人及其外圍設備三維運動的3D可視化,可對仿真單元和機器人及手動任務的設置和編程進行測試、校驗和優化。以廣東交通職業技術學院建立的工 業4.0智能制造生產線為例,在建立實體生產線之前基于西門子NX12.0系統平臺完成所有設備1:1 3D模型,并通過TECNOMATIX中的Plant Simulation進行布局,具體如圖5所示,通過生產流程、工藝流程、物流輸送策略的分析和優化,確保項目順利進行并減少投資浪費。完成生產線仿真設計后,利用Process Simulate進行生產線仿真,確保真實生產線落實前做好一切生產可行性模擬、調試和工藝仿真,并將機器人動作程序、物流程序提前做好,當設備落地安裝后可直接下載程序進行調試生產。
基于TECNOMATIX完成模型構建、仿真調試等工作后,可以搭建智能制造自動化產線,具體如圖6所示。該生產線可實現自動化數據采集、自動化生產、自動化信息交換、自動化物流、自動化倉儲。實踐證明,利用虛擬仿真技術可節約真實生產線調試時間,降低調試設備和操作人員人身安全風險等。
工業4.0智能制造自動化生產線應用的機器人品牌包含FUNAC機器人、ABB機器人、KUKA機器人、YASKAWA機器人,具體可劃分為智能加工工作站、機器人激光切割工作站、機器人上下料工作站、機器人裝配工作站、機器人打磨拋光工作站、SCARA機器人激光打標工作站、MES系統、智能立體倉庫、智能物流(AGV)、RFID系統、手機下單系統、工業交換機和總控系統等,具體組成如圖7所示。
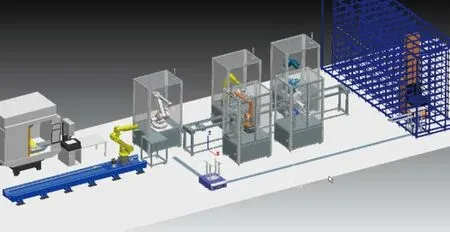
圖5 工業4.0智能制造仿真生產線
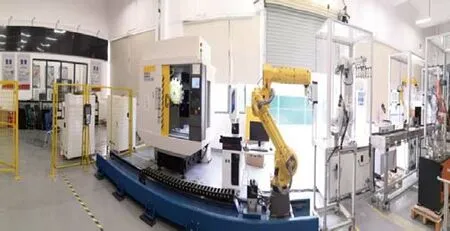
圖6 工業4.0智能制造實體生產線

圖7 智能制造實體生產線結構組成
智能加工工作站為工件底座機床加工、測量、搬運工站,所用到的機器人型號為FANUC M-20iA六軸機器人,主要工作為通過地軌的傳動輔助,將工件底座從中轉臺的托盤搬運至數控機床定位夾具進行二次定位,待機床加工完成后,將工件底座搬運至測量工位進行測量,隨后將工件底座送回托盤,即完成該工站的工作。
托盤搬運工站所用到的機器人型號為ABB IRB 1410六軸機器人,主要工作分為3種情況:第一種情況為AGV智能小車將托盤送至機器人吸取點,機器人將托盤吸取至視覺拍照中轉臺進行二次定位;第二種情況為工件底座加工完成后放回托盤,機器人將托盤吸取至傳送帶進行后續加工;第三種情況為工件整體加工處理完成后托盤回流至傳送帶托盤吸取點,機器人將托盤吸取放置回AGV智能小車處等待入庫。
機器人激光切割工作站所用到的機器人型號為KUKA KR10 R1420,主要工作是從傳送帶流水線抓取工件至氧焰激光口,通過機器人軌跡編程最終切割出預設圖案。
機器人裝配工作站所用到的機器人型號為FUNAC M-10iA六軸機器人,主要工作是從傳送帶流水線抓取工件至打磨設備進行拋光打磨。
SCARA機器人激光打標工作站所用到的機器人型號為ABB IRB 910SC四軸機器人,主要工作是從傳送帶流水線夾取工件底座至激光標刻鏡頭焦點處進行激光標刻,并在標刻處預設內容。
機器人裝配工作站所用到的機器人型號為MOTOMAN-MH12六軸機器人,主要工作是從傳送帶流水線夾取工件裝配至工件底座。
該智能制造生產線的各個機器人工作站均由外部自動控制,即通過主控柜的主控PLC進行信號中轉,實現機器人在制造加工過程中自動啟動、自動暫停、自動報警、自動停止等功能;同時通過SCADA系統與生產制造執行系統(MES)的數據采集與控制指令下達,對設備、生產、加工工程等進行仿真,并實現智能生產線的虛實聯動。
該智能制造生產線能夠實現手機訂單下達、MES訂單分配、按需加工、智能生產、智能出庫等功能,能夠讓客戶真實體驗先進的智能加工技術,具體實施工藝流程如圖8所示。
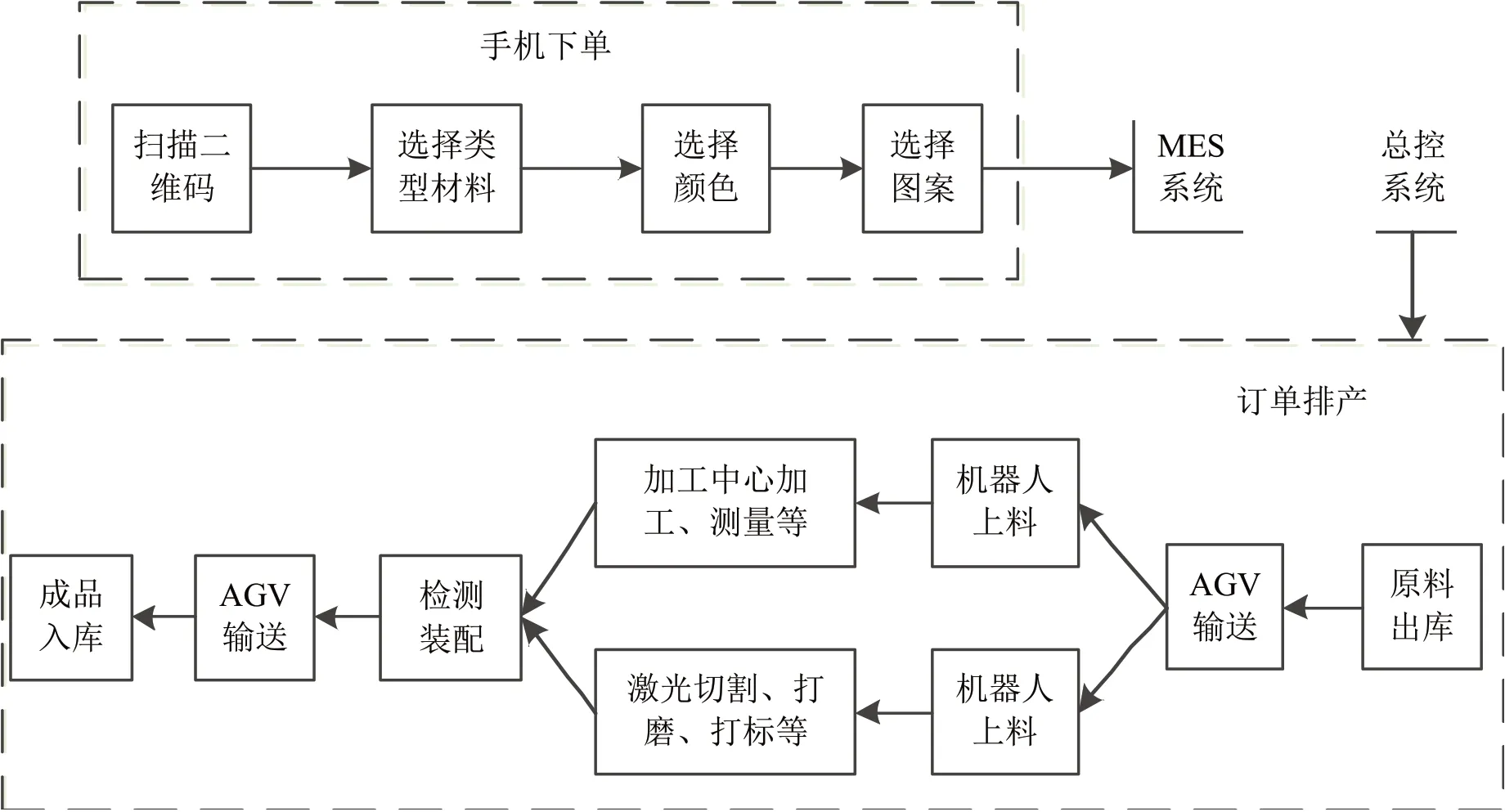
圖8 工業4.0智能產線下單、排產流程
虛擬仿真技術應用展望
虛擬仿真技術是中國制造業轉型升級不可或缺的支撐技術。目前超級計算機技術、人工智能、云機器人已經得到快速發展,但是許多機器人廠商、集成商的仿真系統對其他品牌的兼容性比較差、價格比較昂貴,應盡可能統一標準,完善更多機器人品牌兼容性,提高其開放程度,降低企業使用成本,使企業在設計或升級生產線時從頂層設計成為常態。另外為滿足未來大數據時代下智能生產線、智能工廠的模擬仿真使用需求,虛擬仿真包含的多源、多學科融合技術仍待進一步提升,也需要探索新技術。
未來隨著虛擬仿真技術的提升,有望將設計、測試、優化和驗證等工作效率進一步提升。虛擬仿真技術的運用將以更高的效率、更低的成本為智能生產線、智能工廠的設計賦予無限可能。
猜你喜歡
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國軍轉民(2017年6期)2018-01-31 02:22:28
汽車零部件(2014年11期)2014-09-18 11:57:16
