多無人艇集群協同控制研究進展與未來趨勢
2021-03-08 02:58:54彭周華吳文濤王丹劉陸
中國艦船研究 2021年1期
彭周華,吳文濤,王丹,劉陸
大連海事大學 船舶電氣工程學院,遼寧 大連 116026
0 引 言
21 世紀是海洋的世紀,海洋蘊藏著豐富的生物資源、油氣資源和礦物資源,是人類生存和可持續發展的戰略空間和資源要地。世界各國高度重視自由進入海洋空間、維護海洋空間權益、增強海洋空間控制等技術,尤其是大力發展無人航行器,包括無人艇(unmanned surface vehicle, USV)和自主式水下機器人(autonomous underwater vehicle,AUV),可用于海洋資源的開發和海洋權益的爭奪[1-2]。
無人艇作為一種以遙控或自主方式航行的小型化、智能化、多用途無人海洋運載平臺,是現代多種高技術集成的產物,是一個國家海洋科技實力的重要體現。無人艇具有全天候執行任務的能力,尤其是可以在惡劣的海洋環境中代替人類執行危險、耗時且費力的作業任務,在軍事和民事領域都具有廣泛的應用前景[3-4]。近年來,美、英、以、法、日等海洋強國都大力推進無人艇研制工作,在單無人艇方面取得了豐碩的研究成果。然而,由于海洋環境日益復雜、作業任務日益多樣、單艇作業能力極其受限,無人艇集群化作業成為未來海洋作業的重要發展趨勢之一,也是網絡化、信息化、智能化發展的必然要求[5]。多無人艇協同作業不僅可以顯著地減輕操作人員的負擔,而且使得海洋作業變得更加持續、更具規模和更加智能,完成單一無人艇不能高效完成或無法完成的復雜任務。在軍事領域,無人艇集群具有重要的應用價值,能夠完成協同態勢感知、編隊護航、“蜂群”跟蹤、集群對抗等多種作戰任務。在民用領域,無人艇集群能夠極大地延伸海洋作業范圍,相關應用包括海洋環境監測、海洋移動傳感網監測、協同資源探測、協同災難搜救等[6-7]。無人艇集群控制研究涉及艦船科學、制導與控制、人工智能、通信科學、計算機科學、仿生學等眾多學科和技術領域,綜合多學科理論和技術對無人艇集群協同控制問題進行研究,為無人艇海洋作業提供新理論、新方法和新技術,既體現智能船舶的發展趨勢,又滿足國家海洋戰略的發展需求,具有重要的科學意義和應用價值[5,8]。
目前,國內外在無人艇集群研究方面已經取得了顯著的研究進展。在國外,美國海軍于2014 年在弗吉尼亞州詹姆斯河開展了無人艇“蜂群”作戰演示,13 艘無人艇以集群模式對可疑船只進行攔截和包圍,完成了半自主協同護航任務。2016 年,美國海軍再次開展無人艇集群試驗,實現了4 艘無人艇的自主監測、識別、跟蹤和巡邏等任務。同年,英國海軍在蘇格蘭西海岸開展“無人戰士”大規模無人系統部署計劃演習,完成了空中、水面和水下三維立體協同作戰測試,實現了區域探測和情報搜集等任務。在國內,云洲智能公司實現了81 艘海上無人艇協同表演。哈爾濱工程大學研制了“XL”號和“海豚”系列等無人艇樣機,在海上完成了7 艘無人艇的協同編隊試驗。華中科技大學研發了HUSTER 全自主無人艇,完成了5 艘無人艇的十字和環形編隊隊形湖上試驗。大連海事大學研制了一套多無人艇集群協同控制系統,開展了協同路徑跟蹤、協同目標跟蹤、協同目標包圍等協同控制試驗,實現了7 艘無人艇的“一字”、“人字”、“環形”等多種動態編隊隊形[9-12]。2019 年,上海大學《復雜海況無人艇集群控制理論與應用》項目獲得基金委人工智能重大研究專項資助,將無人艇集群控制研究推向了新的高度。由此可見,國內外對無人艇集群控制技術的研究方興未艾,迫切需要進一步開展前瞻性理論和技術探索。
本文將首先從無人艇運動數學模型出發,分析多無人艇集群協同控制所面臨的挑戰。接著,根據多無人艇的典型運動控制場景,綜述多無人艇集群協同控制的研究成果,包括基于軌跡導引的協同控制(trajectory-guided coordinated control,TRCC)、基于路徑導引的協同控制(path-guided coordinated control, PACC)、基于目標導引的協同控制(target-guided coordinated control, TACC)。最后,對多無人艇集群協同控制的未來趨勢和研究方向進行總結與展望。
1 問題描述
1.1 無人艇運動數學模型
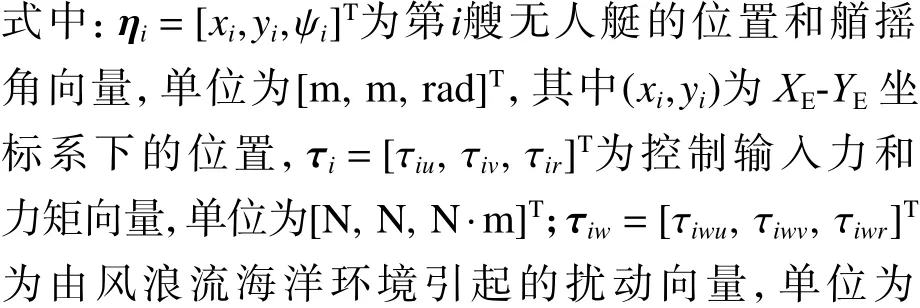
船舶涉及縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖6 個自由度的運動。對于無人艇而言,通常忽略垂蕩、橫搖和縱搖3 個自由度上的運動。如圖1所示,一般在2 個坐標系下對無人艇的運動進行描述,即XE-YE地球坐標系和XB-YB船體坐標系。圖中, ψi為 艏搖角; νi=[ui,vi,ri]T為第i艘無人艇的線速度和角速度向量,單位為 [m/s, m/s, rad/s]T,其中ui和vi分別為XB-YB坐標系下的縱蕩速度和橫蕩速度,ri為艏搖角速度;βi為側滑角。
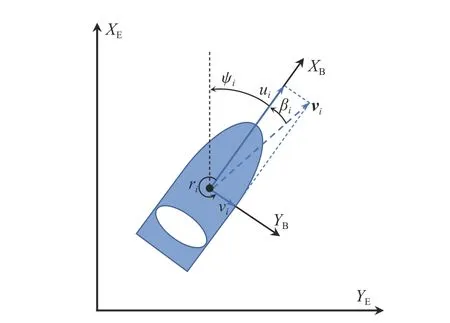
圖1 地球坐標系和艇體坐標系Fig. 1 Reference frames: earth-fixed reference frame and bodyfixed reference frame
考慮N艘無人艇組成的集群系統,第i艘無人艇的運動學和動力學方程可由三自由度非線性模型描述[13]:

無人艇在航行時由于橫漂速度會產生側滑,其側滑角定義為 βi=atan2(vi,ui)∈(?π,π]。根據驅動器類型、數量以及分布的不同,無人艇運動數學模型分為全驅動和欠驅動2 種類型。對于全驅動模型,無人艇在縱蕩、橫蕩和艏搖3 個自由度上的運動可由獨立的驅動器控制。對于欠驅動模型,無人艇動力學控制輸入信號的個數小于其自由度。當橫蕩方向缺乏獨立的驅動器,其控制輸入表示為 τi=[τiu,0,τir]T。
1.2 多無人艇集群協同控制面臨的挑戰
由無人艇運動數學模型式(1)可知,無人艇個體動態具有非線性、強耦合、多輸入多輸出、不確定、強擾動、欠驅動和多約束等特點。多無人艇集群系統通過局部感知或網絡通信關聯成大規模復雜動態系統,具有“復雜船體動態+關聯拓撲+交互規則”的結構特點。多無人艇集群系統的群體行為由無人艇的個體動態、關聯拓撲和交互規則共同決定,其系統規模大、狀態維數高、關聯拓撲復雜,使得多無人艇集群控制面臨著極大挑戰,具體描述如下:
1) 非線性。設計和分析集群控制器的首要問題是建立無人艇運動數學模型。運動建模是船舶運動控制研究的基礎問題之一[2]。無人艇運動的特點決定了其建模難度大、代價高、費時長[2,14]。運動建模包括機理建模和辨識建模。機理建模一般需要大量的專家知識,即使通過機理建模能夠得到精確的模型參數,在實際海洋環境下航行時其參數可能發生變化,因此辨識建模被廣泛研究。辨識建模可分為頻域法和時域法[15]。典型的時域建模方法有最大似然估計、卡爾曼濾波、最小二乘回歸、粒子群優化、神經網絡[16]、模糊系統[17]等。近年來,人工智能技術特別是機器學習取得了長足的進步,可以預見,機器學習將在無人艇運動建模與運動預測方面發揮重要作用[18-19]。
2) 不確定性。無人艇運動模型存在著大量的不確定性,包括模型參數不確定性、未建模動態、以及海洋環境風浪流擾動[13]。為了降低和消除不確定性對運動控制性能的影響,提高無人艇在不確定性條件下的穩定性和魯棒性,研究者提出了滑模控制[20-21]、參數自適應控制[22-24]、魯棒控制[25]、神經網絡控制[26-30]、模糊控制[31-33]、擾動觀測器[34-35]、擴張狀態觀測器[36-39]等控制和估計方法。在運動控制器一體化設計方面,反步法[22-24,27,40]、動態面[41-44]、微分跟蹤器[28,45-48]、指令調節器[17,37,49-50]被廣泛應用于無人艇運動控制器設計。一般而言,不同控制方法的組合能夠帶來控制性能的提升,然而控制器的復雜性也會相應增加,不利于實際工程實現。總之,進一步探索無人艇自適應抗干擾運動控制方法,克服內部和外部不確定性帶來的影響,提高運動控制系統的穩定性、魯棒性、抗擾性,不僅是單無人艇運動控制關注的焦點,也是多無人艇協同需要解決的問題。
3) 欠驅動。無人艇推進系統主要采用雙槳推進、槳舵分離、噴水推進、舷外掛機等推進方式。無人艇系統的控制輸入一般小于其自由度,屬于典型的欠驅動系統。與全驅動不同,欠驅動無人艇運動數學模型存在不可積的二階非完整約束,不能被反饋線性化,Brockett 定理應用結果表明不存在時不變、光滑、狀態反饋控制器來實現欠驅動無人艇的定點調節[23,25]。為解決欠驅動控制問題,典型的控制方法有Transverse 函數法[51]和輔助變量法[52-54]。在控制器設計過程中可采用不同的坐標變換,包括極坐標系變換[55-56]、船體坐標系變換[23]、Serret-Frenet 坐標系變換[25,36,57-58]等。近30 年來,欠驅動船舶運動控制已取得了豐富的研究成果。值得指出的是,現有欠驅動單船舶運動控制方法并不能直接適用于多無人艇集群系統。
4) 多約束。由于驅動器能力的限制,無人艇運動數學模型不可避免地存在線速度約束、角速度約束、推力約束、舵偏約束等物理約束。不考慮實際物理約束的控制器可能導致控制性能下降,甚至引起系統失穩。根據約束變量的不同,可分為輸出約束[59-61]、狀態約束[17,37,62]和輸入約束[62-64]。為解決約束條件下船舶運動控制問題,研究者提出了模型預測控制[63,65]、障礙函數法[61]、輔助系統法[59-60,64]和指令調節器[17,28,37]等控制方法。現有研究結果大多只關注模型本身的約束,未考慮實際海洋環境約束。鑒于海上交通環境的復雜性,解決環境約束和物理約束同時存在條件下的多無人艇集群控制具有一定挑戰性。
5) 狀態不可測。在應用中,無人艇的位置信息可以通過廉價的全球導航定位系統如GPS 和北斗定位系統獲得,但其速度信息無法直接通過導航定位系統測量得到。加速度計只能測量加速度信息,不能測量速度信息。多普勒計程儀雖然可以對無人艇速度信息進行直接測量,但其價格昂貴,不適合大規模無人艇集群應用,尤其是小型低成本無人艇。因此,研究速度觀測器及其輸出反饋集群控制問題具有實際意義,能夠顯著降低控制算法的實現成本。為了對速度信息進行觀測和估計,研究人員提出了波浪濾波觀測器[66]、高增益觀測器[16,40]、擴張狀態觀測器[46,67-70]、神經網絡觀測器[28,71-72]等估計方法。波浪濾波觀測器依賴船舶動力學的無源特性,但需要模型參數已知;高增益觀測器能夠估計速度信息,但不能估計動力學模型的不確定性;神經網絡觀測器能夠對模型不確定性和速度信息進行同時觀測,但參數收斂依賴持續激勵條件;擴張狀態觀測器能夠對無人艇總擾動和速度進行同時觀測,觀測器中參數降為一,參數整定容易。隨著無人艇應用數量的增加,研究輸出反饋多無人艇集群控制具有實際意義,能夠顯著降低實現成本。
6) 通信受限。信息交互是實現無人艇集群控制的基礎,網絡通信是實現信息交互的重要手段。目前,常見的海上網絡通信方式包括海上無線通信、海洋衛星通信和岸基移動通信。海上無線通信受氣候條件和海洋環境影響較大, 通信可靠性不高, 通信帶寬窄;海洋衛星通信系統的運營和維護成本高,且通信帶寬受限;岸基移動通信是海洋通信網絡的一種有力補充,具有高速率、低成本的優點,但是只能適用于小范圍的近海海域。總體而言,目前海上通信存在速率低、帶寬窄、成本高等缺陷。因此,如何實現通信約束條件下多無人艇集群控制是值得研究的重要課題,尤其是要發展分布式的協同控制方法[73]。
7) 避碰。多無人艇協同不僅要避免與復雜海洋環境中動、靜態障礙物發生碰撞,而且要避免多無人艇成員之間發生碰撞。自主避碰是保證無人艇集群安全航行的前提,特別是隨著海上交通密度的不斷增加,對避碰決策與控制的時間提出了更高要求,避碰是集群控制需要克服的難點。為了有效避免編隊無人艇發生碰撞,現有方法包括指定性能法[74-75]和人工勢能函數法[34,51]。目前關于無人艇集群編隊避碰的研究還十分有限。因此,針對復雜海洋環境和潛在威脅信息,如何在通信、感知、計算資源受限的條件下,設計協同控制器避免無人艇與環境障礙物以及無人艇個體之間發生碰撞,保證無人艇集群運動決策的安全性,是多無人艇集群協同控制面臨的挑戰之一。
1.3 控制結構
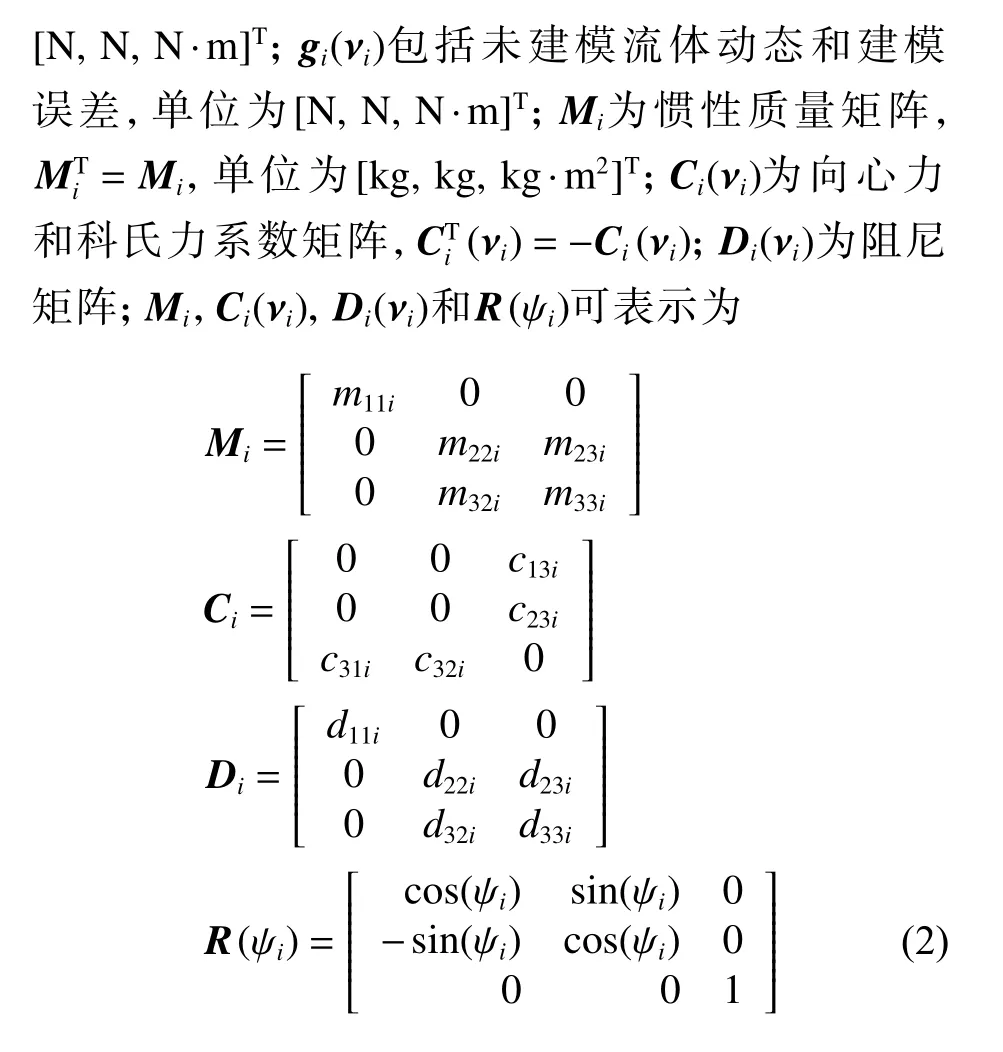
如圖2 所示,多無人艇集群控制結構包括集中式控制、分散式控制和分布式控制[16]。
圖2 多無人艇協同控制器結構Fig. 2 Coordinated control architectures of multiple unmanned surface vehicles
1) 集中式控制。如圖2(a)所示,集中式控制通過一個中央控制器C 對集群進行統一控制, 需要n艘無人艇的狀態信息。中央控制器可以在遠程地面站、母船或云端實現。集中式控制根據所有無人艇信息進行統一決策與控制,因此能夠獲得全局最優的性能。然而,集中式控制通信帶寬要求高、計算資源要求高,信號傳送可能產生延時,導致編隊規模不能任意擴展[76-78]。
2) 分散式控制。如圖2(b)所示,分散式控制無中央控制器,n艘無人艇對應n個相互獨立的控制器Ci,各控制器是平等的。由于感知能力的限制,控制器Ci只掌握無人艇集群中的部分狀態信息。與集中式控制相比,分散式控制盡管很難保證全局的最優, 但由于它具有模塊化、可擴展等優點,受到控制人員的廣泛關注[41,56,75,79]。
3) 分布式控制。如圖2(c)所示,與分散式控制類似,n艘無人艇對應n個相互獨立的控制器Ci,控制器Ci通過局部感知和通信實施對個體的控制,不需要掌握群體的全部狀態信息。與分散式控制不同,分布式控制器C1~Cn之間存在信息交換。由于信息的感知、通信、控制是分散進行的,極大程度地降低了信息通信的代價,控制更為靈活,操作更為方便,并且具有高容錯性和擴展性。由于分布式控制不需要全局通信,降低了對通信帶寬的要求,因而更適合于通信受限的海洋環境[17,45-46,80-81]。
2 協同控制方法
集群協同現象在自然界無處不在,如鳥群、魚群、蟻群等。生物通過簡單個體協作展現出令人驚嘆的復雜行為模式,這種行為模式對于生物適應環境、躲避天敵、共同捕食、群體決策起到關鍵作用。受生物群體協調行為的啟發,國內外研究人員在集群控制方面開展了深入研究,文獻 [1]介紹了多無人艇集群協同控制的研究成果。典型的集群控制方法包括領航-跟隨法[20,29,82-84]、基于行為法[76]、虛擬結構法[77]、人工勢能法[34,51]、圖論法[17,28,45]。根據無人艇運動導引方式的不同,現有研究結果可歸納為基于軌跡導引的協同控制、基于路徑導引的協同控制和基于目標導引的協同控制。表1 從集中式控制、分散式控制、分布式控制3 種控制結構總結了現有多無人艇集群協同控制研究結果的優缺點。表2 從反步法、動態面、跟蹤微分器、指令調節器4 類控制器設計方法對現有多無人艇集群協同控制研究結果進行了分類總結。表3 從滑模控制、參數自適應、神經網絡、模糊邏輯、抗擾控制、約束控制、輸出反饋、避障避碰、連通保持共9 類控制方法對現有多無人艇集群協同控制研究結果進行了分類總結。
2.1 基于軌跡導引的協同控制
在基于軌跡導引的集群控制方面,控制目標是多艘無人艇跟蹤一條或多條時間相關的參考軌跡 η(t),同時保持期望的編隊隊形。其時間要求和空間要求是耦合的,即要求在指定的時間到達指定的位置,適用于時間要求和空間要求較高的運動場景。根據軌跡個數的不同,現有研究結果可分為全軌跡導引的軌跡跟蹤[34,51]、單軌跡導引的分布式軌跡跟蹤[21,38,42,44,99-101]、多軌跡導引的分布式包含跟蹤[71,74,102]。如圖3 所示,在全軌跡導引方面,通常由軌跡生成器產生每艘船舶的參考軌跡,從而將編隊控制問題轉化為每艘無人艇的軌跡跟蹤問題,軌跡生成器可采用集中式或分布式結構。在單軌跡導引方面,集群中只有一部分無人艇訪問參考軌跡信息,另一部分無人艇僅和相鄰無人艇進行信息交互,不能訪問參考軌跡信息。控制的目標是多無人艇協同跟蹤該參考軌跡,保持期望的編隊隊形。在多軌跡導引方面,控制的目標是跟蹤多參考軌跡生成的凸集空間。在控制結構上,單軌跡導引和多軌跡導引屬于分布式控制。
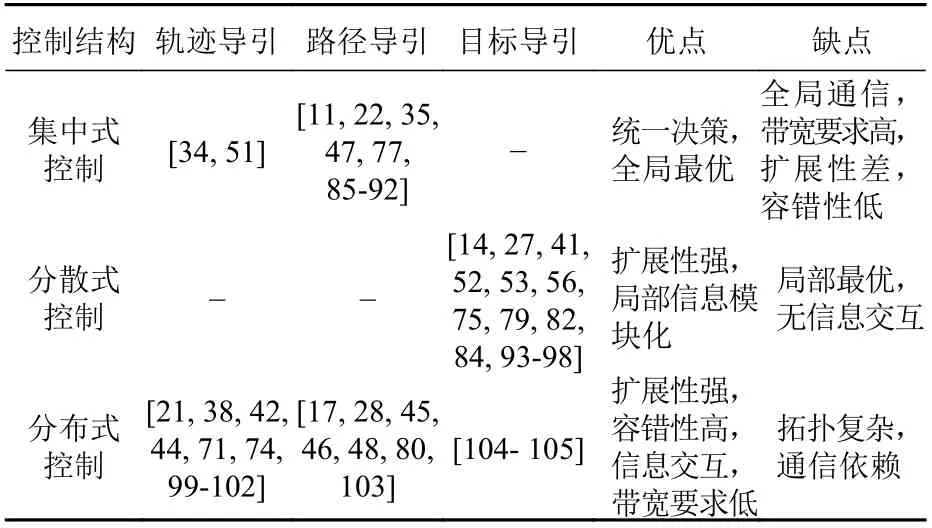
表1 軌跡導引、路徑導引和目標導引的集群協同控制結構與優缺點Table 1 Coordinated control architectures, their advantages and disadvantages of TRCC, PACC and TACC
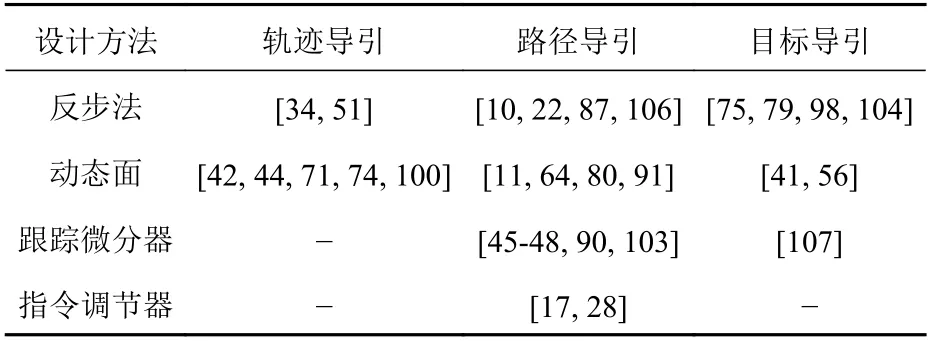
表2 軌跡導引、路徑導引和目標導引的集群協同控制器設計方法Table 2 Design methods of coordinated controller for TRCC,PACC, TACC
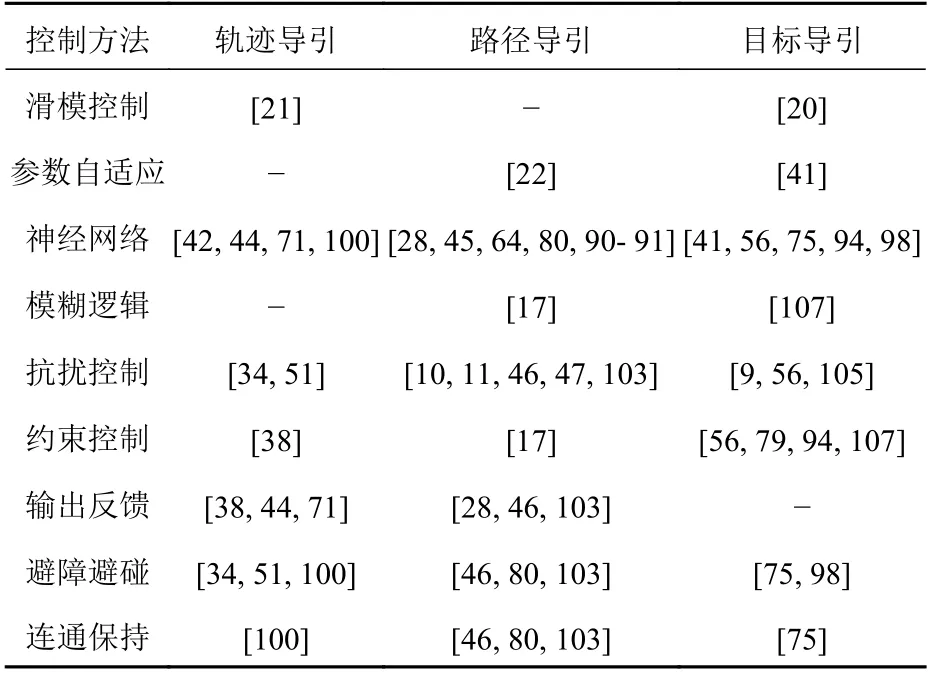
表3 軌跡導引、路徑導引和目標導引的控制方法Table 3 Control methods of TRCC, PACC, TACC
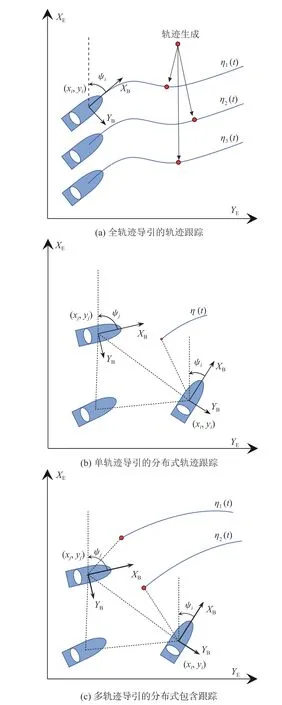
圖3 基于軌跡導引的集群控制Fig. 3 Trajectory-guided coordinated control
在全軌跡導引方面,Do[51]針對感知距離受限的欠驅動船舶,采用非線性變換、反步法、Transverse 函數法和p次可微階躍函數,提出了無風險編隊控制器,在保持隊形穩定的同時能夠避免船舶之間發生碰撞。Transverse 函數法可能導致控制信號和跟蹤誤差高頻振蕩,Do[34]采用一個二階動態系統產生跟蹤參考軌跡,提出了一種改進的無碰撞同步軌跡跟蹤控制器。該方法避免了Transverse 函數法中復雜的坐標變換。Do[34,51]采用軌跡生成器產生全局參考軌跡,屬于集中式控制。與Liu 等[38,56]需要全軌跡信息不同,Li等[21, 38, 42, 44, 71, 74, 99- 100, 102]研究了多無人艇分布式軌跡跟蹤控制問題。
在單軌跡導引方面,Peng 等[42]提出了基于預估器的神經網絡動態面控制方法,設計了無人艇分布式編隊控制器,提高了神經網絡學習和控制輸入信號的暫態性能。考慮風浪流海洋環境擾動,Peng 等[44]提出了基于擾動觀測器的分布式編隊控制器,實現了動力定位船舶觀測器和控制器的解耦設計。為了保證控制信號的低頻特性,Peng 等[101]提出了基于低頻學習機制的分布式神經網絡控制器。為了減小神經網絡的學習參數,Lu 等[99]提出了最少參數學習的神經網絡編隊控制器。為了改進編隊控制系統的收斂性,Fu 等[38]針對受約束水面船舶提出了基于有限時間擴張狀態觀測器的編隊控制器。上述文獻[38,42,44,99,101]主要針對全驅動船舶而設計。在欠驅動船舶方面,Park等[100]提出了基于誤差變換的編隊控制器,具有避障、避碰和連通保持功能。為了實現編隊誤差的有限時間收斂,Li 等[21]提出了分布式非線性滑模編隊控制器。
在多軌跡導引方面,目前已經取得了一些研究成果[71,74,102]。Peng 等[71]針對單向網絡連通含模型不確定性和海洋環境擾動的無人海洋航行器,提出了基于迭代學習神經網絡的分布式狀態反饋和輸出反饋包含控制器。為了避免在控制器設計中使用函數逼近器,Yoo 等[74]提出了指定性能的分布式包含控制器,使得包含跟蹤誤差在暫態和穩態過程中收斂于預設的范圍內。為了改進跟蹤誤差的收斂性,Qin 等[102]提出了自適應有限時間收斂包含控制器,減小了控制信號的抖顫。
2.2 基于路徑導引的協同控制
在基于路徑導引的集群控制方面,控制目標是多艘無人艇跟蹤一條或多條預設的參數化路徑η(θ),同時保持期望的編隊隊形。與軌跡導引方式相比,除了控制器設計外,基于路徑導引的集群控制需要進行參數化路徑更新律的設計,因此提供了額外的控制自由度。對于群體而言,其空間要求和時間要求是解耦的,可以分別獨立進行控制,如獨立控制無人艇集群的航行速度。如圖4所示,根據參數化路徑個數的不同,現有研究結果可分為全路徑導引的協同路徑跟蹤[11,22,35,47,77,85-92]、單路徑導引的分布式路徑跟蹤[17,46,80]和多路徑導引的分布式路徑跟蹤[28,45,48,103]。對于全路徑導引的協同路徑跟蹤,每艘船舶跟蹤一條參數化路徑,集群行為通過參數化路徑變量的協同實現。在單路徑導引的分布式路徑跟蹤方面,集群中只存在一條參數化路徑,多無人艇通過局部信息交換實現對參數化路徑的協同跟蹤。與基于多軌跡導引的包含控制類似,多路徑導引的分布式路徑跟蹤跟隨的是參數化路徑上虛擬領航者生成的凸集空間。
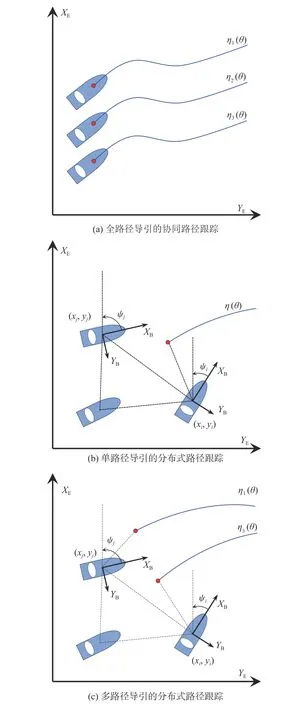
圖4 基于路徑導引的集群控制Fig. 4 Path-guided coordinated control
在全路徑導引方面,Skjetne 等[77]將協同路徑跟蹤分解為幾何任務和動態任務,設計船舶協同路徑跟蹤控制器,其路徑參數更新需要所有船舶的參數信息。Do[35]提出了另一種路徑參數更新律,每艘跟隨船需訪問領航者路徑信息。Ihle 等[85]采用無源性理論設計了分布式同步路徑參數更新律,路徑參數通過離散采樣更新,去除了文獻[35, 77]要求全局通信的假設條件。隨后,研究人員分析了不同網絡環境下協同路徑跟蹤控制器的穩定性,包括通信丟包與通信時延[88], 時變通信時延[86],離散周期通信[87], 事件觸發通信[92], 時變狀態相關網絡攻擊[47]等。Do 等[35,77,85-88]假設船舶模型是精確已知的,因此不能保證參數不確定和海洋環境擾動下的穩定性。為了改進模型不確定和海流影響下的穩定性,Almeida 等[22]采用反步法設計了自適應協同路徑跟蹤器。為了解決海洋環境下的非結構不確定性和風浪流海洋環境擾動,Wang 等[89]提出了基于神經網絡的狀態反饋和輸出反饋協同路徑跟蹤控制器。另外,Gu 等[11]提出了基于擴張狀態觀測器的抗干擾協同路徑跟蹤控制方法,試驗驗證了該方法的有效性。
值得指出的是,Almeida 等[22,85-91]需要為每艘無人艇單獨規劃路徑,只能實現多路徑上的并排編隊隊形。Liu 等[108]提出一種基于路徑參數包含的協同路徑跟蹤方法,實現了單一路徑上的隊列編隊隊形。Liu 等[90]將該結果進一步拓展到動力學層次,采用模塊化方法設計了協同路徑跟蹤控制器。Liu 等[90,108]局限于開曲線路徑上的協同編隊,不能實現閉曲線的協同路徑跟蹤。Liu 等[91]提出了參數環形跟蹤的協同路徑跟蹤控制方法,實現了閉曲線上的對稱編隊隊形。隨后,在參考速度非全局已知的情形下,提出了參數循環跟蹤的協同路徑跟蹤控制器,試驗驗證了所提方法的有效性[10]。文獻[11, 35, 47, 77, 86-90, 92]中,每艘無人艇都需獲得路徑信息,屬于集中式控制。
在單路徑導引的分布式路徑跟蹤方面,Peng等[17]提出了基于神經動態優化和模糊逼近的分布式協同路徑跟蹤控制器,實現了單參數化路徑導引的多無人艇分布式編隊控制,在狀態約束條件下優化了集群控制性能。Peng 等[46]采用三階擴張狀態觀測器估計線速度和艏搖角速度,提出了帶避障避碰和連通保持功能的分布式輸出反饋路徑跟蹤控制器,這些控制方法均局限于全驅動無人艇。針對通信距離受限下欠驅動多無人艇集群系統,Peng 等[80]設計了分布式時變隊形控制器,所提控制器兼具避障、避碰與連通保持功能。
在多路徑導引的分布式路徑跟蹤方面,Peng等[45]采用模塊化方法設計了分布式協同路徑跟蹤控制器,使得多無人艇收斂到多領導者所形成的凸包內。Peng 等[28]將其文獻[45]的結果擴展到輸出反饋情形,提出了基于神經動力學觀測器的分布式協同路徑跟蹤控制器,該研究結果局限于全驅動船舶。Gu 等[48]提出了多參數化路徑導引的欠驅動多無人艇分布式包含操縱方法。隨后,在分布式路徑跟蹤控制器設計中引入避碰和連通保持機制,采用有限時間收斂擴張狀態觀測器,提出了基于位置和艏搖角信息反饋的分布式協同路徑跟蹤控制器,實現了包含編隊誤差的有限時間收斂[103]。
在路徑參數協同方面,典型的方法包括連續路徑參數更新[17,22,28,45,48,80,86,88-91,103]、數據采樣更新[85]、離散周期更新[87]等。在運動學層次,Peng 等[17,45,46,48,80,103]提出的分布式路徑跟蹤制導率均采用連續控制方式,從網絡控制的角度出發,如何進一步減輕分布式協同制導的通信負擔是值得研究的課題。
2.3 基于目標導引的協同控制
基于目標導引的集群控制即無人艇跟蹤單個或多個動態目標,同時保持期望的編隊隊形。與軌跡導引和路徑導引不同,由于無人艇感知或通信能力的限制,跟隨船只能獲取目標船的瞬時信息,無法獲得目標船的未來位置、速度和加速度等信息。如圖5 所示,根據目標個數不同,現有結果可分為單目標導引的單無人艇目標跟蹤[9,14,20,27,41,56,75,79,82,94,96,105,107,109]、單目標導引的多無人艇協同跟蹤[104,110]和多目標導引的多無人艇包含跟蹤[105]。在單目標導引的單無人艇目標跟蹤中,控制目標是跟隨船與領航船保持相對距離或相對角。在單目標導引的多無人艇協同跟蹤方面,集群中只存在1 艘目標船,多無人艇通過局部信息交換實現對該目標船的協同跟蹤。在多目標導引方面,多無人艇通過局部信息交換實現對多目標船的協同包含。
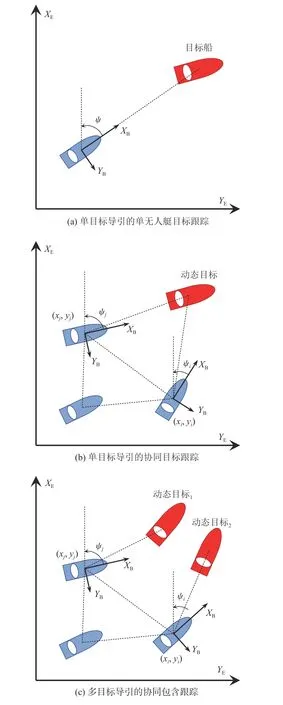
圖5 基于目標導引的集群控制Fig. 5 Target-guided coordinated control
在單無人艇目標跟蹤方面,研究人員已經取得了豐富的研究成果[14,20,27,41,52,53,56,75,79,82,84,93-98]。具體而言:Fahimi[20]采用滑模控制方法設計了領航–跟隨編隊控制器。該控制器僅需無人艇與鄰船的相對量測信息。Peng 等[41]提出了基于多層前饋神經網絡的自適應編隊控制器,解決了運動學和動力學同時存在不確定的編隊控制問題。Cui 等[27]提出了一種基于虛擬目標導引的自適應領航–跟隨編隊控制方法,動力學不確定與海洋環境擾動采用徑向基神經網絡進行補償。考慮船舶輸入受限問題,Shojaei[94]結合飽和函數提出了神經網絡領航-跟隨編隊控制器。考慮船舶速度不可測,Shojaei[109]提出了基于神經網絡觀測器的飽和編隊控制器。考慮船舶不確定性和執行機構故障,Jin[79]提出了故障容錯自適應領航–跟隨編隊控制器。采用時變正切函數保證了相對距離和相對角度在期望的界內。考慮編隊誤差的暫態性能,Dai 等[75]提出了基于指定性能的領航–跟隨編隊控制器,該控制器具有避碰和連通保持功能。類似的方法可見Sun 等[82]的研究。考慮目標船動態未知,Liu 等[56]設計了基于ESO 的神經網絡控制器。為了減少控制抖顫,Sun 等[82]提出了自適應連續滑模編隊控制器。Fahimi 等[20,41,56,75,79,94,109]在目標跟蹤時未引入制導策略,Breivik 等[14]則將平行接近制導引入目標跟蹤設計,通過跟蹤位于領航船附近的虛擬目標,實現了領航–跟隨編隊結構。Hinostroza 等[96]提出了向量場制導的目標跟蹤方法。
值得指出的是,Breivik 等[14,20,41,56,75,79,94,96,109]研究的是一對一的目標跟蹤問題,控制的目的是目標船與跟隨船保持相對位置和角度。在某些應用場景期望對目標船實施包圍,保持與目標船環繞的編隊隊形。Jiang 等[9]針對未知海流擾動下目標跟蹤問題,提出基于視距制導和海流估計器的目標包圍控制方法,實現了無人艇對速度未知目標船的動態包圍。Peng 等[107]提出了事件觸發的動態面設計方法,設計了基于模糊邏輯系統的目標包圍控制器,降低了無人艇執行器的動作頻率。上述研究結果[9,14,20,27,41,56,75,79,82,94,96,105,107,109]只能實現單無人艇對單目標的跟蹤或包圍。
在單目標導引的協同目標跟蹤方面,Glotzbach等[110]采用視距制導方法,提出了通用的協同目標跟蹤控制結構,實現了對水下動態目標的多無人艇協同跟蹤。Liu 等[104]針對模型已知欠驅動無人艇,提出了基于群集動態和軌跡跟蹤的分層控制方法,實現了對目標艇的跟蹤和包圍。該文提出的分布式協同控制器實現了多無人艇協同目標包圍隊形。
在多目標導引方面,Soares 等[111]和REGO等[112]通過調節跟隨者與2 個領航者的相對位置,實現了3 艘海洋航行器的三角編隊隊形。Yu等[105]則是針對動態未知欠驅動無人艇,提出了基于多目標艇導引的分布式協同目標跟蹤方法,實現了編隊-包含隊形。
3 總結與展望
隨著艦船科學、控制科學、網絡科學、通信科學、電氣工程、人工智能的飛速發展, 艦船科學與各學科交叉融合, 無人艇集群控制技術不斷取得新的研究進展。為建立以高可靠、高精度、強適應、抗干擾、自主協同為特征, 具備快速集群任務響應、集群隊形重構與變換能力,滿足未來復雜海洋環境下集群化海洋作業任務的多無人艇自主協同控制系統,本文最后提出一些尚待解決的問題及未來值得深入探索的研究方向:
1) 多無人艇網絡化協同控制。將無人艇通過網絡連接實現信息交互與共享,進而實現網絡環境下的集群協同,是未來多無人艇集群控制研究的重要趨勢之一。現有多無人艇集群控制理論通常假設通信與信息傳輸是理想的,重點關注的是如何利用分布式反饋信息實現期望的集群控制目標,未考慮通信環境如通信時延、數據丟包、拓撲時變、間歇通信、異步通信、距離受限等因素對集群控制的影響。這些網絡因素可能降低集群控制性能,甚至導致閉環系統失去穩定性。因此,如何進一步考慮網絡因素,系統地建立網絡環境下多無人艇分布式協同控制方法值得深入研究。
2) 多無人艇安全協同控制。避障和避碰不僅是實現單無人艇自主航行的基礎,也是保障多無人艇集群安全航行的基礎。由于海上交通環境的復雜性,無人艇在水面航行時不僅會遇到多種靜態或者動態障礙物,還可能存在觸碰暗礁或擱淺等風險。與此同時,多無人艇之間也可能發生碰撞,多無人艇安全協同控制極為重要。特別是編隊個體和海上交通密度的增加,給無人艇集群控制器設計帶來了更大的挑戰。因此針對復雜海洋環境和潛在的威脅信息,如何設計集群分布式協同控制器,避免無人艇與環境障礙物以及無人艇個體之間發生碰撞,保證多無人艇編隊航行或編隊重構的安全性值得深入探索。
3) 多無人艇最優協同控制。現有多無人艇集群控制僅研究如何在不確定及海洋環境擾動下保持編隊隊形穩定的問題,閉環控制系統的穩定性、收斂性、魯棒性是關注的重點,而沒有考慮集群控制的最優性。隨著海洋科技的發展,必然對集群控制性能提出更高的要求,尤其是如何在能量受限、資源受限、通信受限以及環境受限的條件下,針對模型未知的多無人艇集群系統,研究具有自主學習和自主優化能力的集群協同控制器,實現多無人艇集群最優協同控制。
4) 多無人艇免模型協同控制。現有多無人艇集群控制器設計和分析大多基于現代控制理論,依賴由微分方程或差分方程描述的數學模型,如魯棒控制、自適應控制、神經網絡控制、模糊控制、滑模控制等都是基于無人艇模型構造集群控制器,系統的穩定性、收斂性、魯棒性成為控制器設計關注的重點。控制過程完全依賴或部分依賴模型參數信息,控制算法較為復雜,待估參數多,不利于實際工程應用。免模型控制如PID控制僅利用輸入、輸出數據進行反饋控制,在工程實現方面更具吸引力,控制器可調參數少,降低了控制器實現的復雜性。因此,如何建立多無人艇免模型協同控制方法,降低集群控制器的復雜性,對于多無人艇集群控制方法走向工程應用具有重要意義。
5) 多無人艇與多水下航行器立體協同控制。由于GPS 不適用于水下環境,水下導航定位成為AUV 水下作業時所面臨的重要挑戰之一。除此之外,AUV 海洋作業面臨的另一個挑戰是缺乏高效的通信鏈路。AUV 水下作業一般采用水聲信道進行通信。然而,水聲信道是迄今為止最為復雜的無線通信信道之一,因其固有的時空頻變以及窄帶、高噪、長時延傳輸等特征,使得水聲通信在性能上難以滿足AUV 對實時控制的需求。與AUV 相比,無人艇具有精確的導航定位能力,能夠與水上、水下、空中等空間平臺進行通信。無人艇與AUV 立體協同不僅可以為其提供垂直通信信道,克服水聲通信的頻帶限制,同時也能提供精確的GPS 導航信息。因此,開展多無人艇與多AUV 立體協同控制研究,有助于實現AUV 大范圍、長時間、高效率的海洋作業。
6) 多傳感信息融合的多無人艇協同控制。無人艇通過搭載航海雷達、激光雷達、視覺傳感器、熱像儀和聲吶等感知設備,可以增強對目標識別和障礙檢測的能力。航海雷達探測廣,但感知精度低,存在探測盲區。可見光攝像頭、紅外攝像頭等視覺傳感器的感知精度低,且基于圖像的目標識別技術對數據的實時處理能力要求高,在大霧天氣下難以正常工作。與視覺傳感器相比,激光雷達的識別精度高,但也存在惡劣天氣可靠性差的問題。聲吶分為主動聲吶和被動聲吶,主動聲吶可以探測靜止目標,但探測波短,容易暴露位置。被動聲吶探測波長,隱蔽性強,但不能探測靜止目標。總而言之,無人艇在對目標識別和障礙檢測方面仍處于感知精度低、實時性差的落后階段。因此,研究一套探測范圍廣、感知精度高、實時性好的智能感知設備,對于多無人艇集群協同的可靠性和安全性至關重要。
7) 多無人艇集群協同控制試驗研究。美國海軍、里斯本理工大學、云洲智能、哈爾濱工程大學、上海交通大學、華中科技大學、西北工業大學、大連海事大學等單位開展了集群控制試驗研究。然而目前關于無人艇集群控制試驗方面的研究報道還十分有限,大量的理論控制算法有待進一步檢驗。因此,將集群控制理論和實踐相結合,大力開展多無人艇集群控制試驗驗證研究,對新型集群控制基礎理論的有效性進行試驗驗證,將進一步推動和加快多無人艇集群系統的工程應用。
