基于慧魚模型的室內物流機器人系統設計
2021-03-08 08:48:44李云鵬魏羽欣藺子恒劉一燔黃曦元
內蒙古科技與經濟 2021年2期
李云鵬,劉 楠,魏羽欣,藺子恒,馮 源,劉一燔,黃曦元
(天津理工大學 機電工程國家級實驗教學示范中心,天津 300384)
筆者擬設計一種新型物流機器人補全物流運輸最后一步——送貨上門。機器人將批量運送快遞包裹進入單元樓等建筑物內部各樓層并將包裹運送至各住戶門口,大大提高快遞派送效率。
1 物流機器人發展趨勢
目前,社會零售總額的13%是被網絡零售所占據的,這就導致電商物流日漸趨向于自動化。然而未來電商物流的發展方向,很大程度上由自動化程度來決定,并且電子商務整個行業一直在飛快發展。
物流路徑隨著大數據應用對供應鏈的改變也會發生改變,這也在快速改變著全國的產業布局。未來直接從工廠發貨的這些貨物將更受青睞,這做到了“只動數據不動貨物”,得到了物流路徑最佳方案。
電商物流趨勢一定是走共享物流之路,這必將告別現代物流的“農業化時代”,進而走向社會化物流。社會化物流趨勢百分之百會減少社會交易成本的浪費。而隨著平臺經濟的發展,“平臺+個人”商業模式不斷演化,依賴專職的物流從業人員并不能克服這種困難,最主要的原因是“平臺+個人”商業模式一直在發展變化,而平臺經濟的發展也在很大程度上促進這種情況的蔓延。
學生居住的密集度和特殊性決定了大學生是這種消費力量的核心成分。所以,在快遞行業,如何解決校園等工作學習場合的快遞“末端二百米”問題,如何提高效率和服務水平,是本文研究的中心。
2 機械結構
筆者設計的機械結構主要分為兩部分,運送機械及搬運機械臂。
2.1 運送機械
運送機械采用履帶式移動平臺,底盤有轉向靈活、不易打滑、可以穩定的通過樓梯,實現在宿舍樓各樓層之間移動的功能。
由于需要履帶式移動平臺翻越障,平臺的上輪系與下輪系的距離決定了其翻越能力,這就導致平臺必須在翻越物之上。履帶移動平臺制造履帶的傾角以便爬上樓梯,由于前角角度關系到平臺的翻越能力,所以本文將支撐輪和主動輪進行縱向不同軸設計,如圖1所示。

圖1 履帶受力分析
經模擬仿真分析,40°~45°為最佳前傾角,越障能力最強,經調查樓梯傾角多在40°~50°,故設計為45°傾角,平臺高度為模擬臺階兩倍(150mm)。
由于慧魚模型組合包中缺少部分組件,故使用SolidWorks軟件自行設計,如圖2所示,并由3D打印制造。

圖2 履帶式移動平臺設計模型
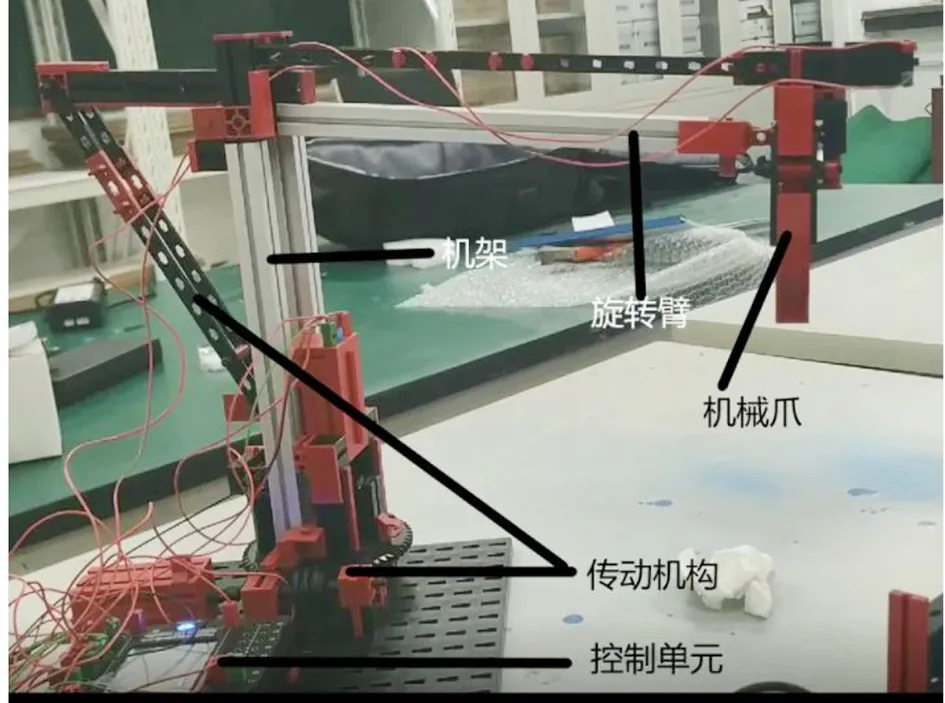
圖3 物流機器人機械臂的慧魚模型
2.2 搬運機械臂
經研究,對于機械臂控制難度增加與自由度的數量是正比例關系,即增加自由度會提高控制難度。不僅如此,自由度的增加還會導致成本的激增,因此在設計機械臂時除考慮本身的強度、剛度等要求外,還考慮了在準確抓取貨物搬運至送貨地點的同時,盡量減少機械臂的自由度的方案。
筆者設計的機械臂包含主機架、傳動機構、旋轉臂以及機械爪等核心機構,并設有獨立的控制單元,如圖3所示。
經研究,機械臂平面旋轉傳動機構選用蝸輪蝸桿機構。
蝸桿傳動具有緊湊的結構、穩定平滑的傳動、較高的傳動比而噪聲和嚙合沖擊都不大。蝸桿具有自鎖性(當嚙合輪齒間的當量摩擦角大于導程角時),十分適合物流機器人從貨廂取出貨物時的功能需求,使貨物平穩快速取出精準投放到指定位置。
經研究,機械臂升降傳動機構選用絲杠螺母機構與平行四邊形平面連桿機構,這是根據物流機器人的工作要求,選擇的一種可以將電機、減速裝置與螺旋傳導一體化集成的機械臂Z軸升降結構。螺旋傳動是將旋轉運動轉化為直線運動,不但可以保證結構自鎖,與其他類似的傳動形式相比,還具有更簡單的結構、更連續平穩的工作能力、更強的承受能力、更高的傳動精度、更良好的穩定性,以此獲得穩定的升降。結合以上優點,還可以發現絲杠螺母升降結構能夠有效降低制造加工難度、節約成本,并且能夠同時進行能量和力傳遞。
平行四邊形機構保證機械爪始終保持與平臺垂直的狀態,使貨物始終平穩保持水平狀態,便于投放貨物,提高精準度。選擇平行四邊形機構就可以輕松滿足需要, 在實現執行器的水平工作的同時節省了一個轉動副。經計算平行四邊形機構自由度為1(W=3×3-2×4=1), 只需一個主動件,因此選用此機構既減少了能耗又降低了程序復雜度,抓取動作,如圖4所示。

(a)旋轉 (b)校準
3 控制系統
3.1 控制器(ROBO TXT控制器)
筆者采設計的控制系統采用的是ROBO TXT控制器(見圖5)。
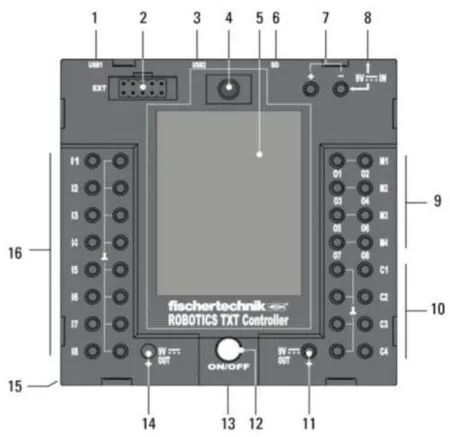
圖5 ROBO TXT控制器說明
1.USB-A接口(USB-1);2.擴展板接口;3.Mini USB接口(USB-2);4.紅外接收管;5.觸摸屏;6.Micro SD 卡插槽;7.9V供電端,充電電池接口;8.9V供電端,直流開關電源接口;9.輸出端 M1-M4,或01-08;10.輸入端C1—C4;11.9V輸出端(正板端子);12.ON/OFF開關;13.揚聲器;14.9V輸出端(正極端子);15.紐扣電池倉;16.通用輸入端11-18
ROBO TXT控制器適用于控制各種慧魚模型,是“慧魚創意模型”的重要控制模塊,通過USB端口或者通過內置的藍牙與 Wi-Fi 模塊傳輸軟件指令,從而實現慧魚模型的控制運動過程。
3.2 傳感器
筆者設計的物流機器人為了提升物流機器人的行進靈活性,在樓道行進時主要采用光學導引的方式(見圖6)前進,在機器人行駛路徑上制造明顯色差帶,通過對光學傳感器收集的色差帶信號轉化為電子信號進行識別,檢測是先鋪設在地面的色帶與物流機器人的相對位置,實現導引前進,而光學導的方式在地面路線設置方便十分簡單便捷。

圖6 光學引導系統原理
3.3 電機選用
項目組設計的物流機器人重4kg,要求最快運行速度為1m/s,兩臺電機驅動其行走,最大爬坡角度為5°,電機供電電壓為24V。
電機轉速要求:
電機轉矩要求:
由于整體系統重量為4kg,預估摩擦系數為0.03。
轉矩計算:
T=Ff×R
=(0.03+sin5)×4kg×9.8kgm/s2×32.5×10-3m
=100mN·m
但由于需要其分擔到兩個電機上,此時每個電機轉矩為50mNm。
綜上初步減速電機參數為:
轉矩:50mNm,轉速:290rpm。
根據此需求數據本文設計選擇了幾款符合要求的電機型號(見表1)。
4 控制程序
4.1 ROBO PRO的程序設計(見圖7)
在程序控制方面,筆者使用的是慧魚 ROBO PRO 軟件,通過流程圖和數字流程圖的結合,在使用符合需求的一些程序模板使其控制程序以及流程圖和數字流程圖可以生成可視化的用戶界面,最后將其后臺運算的數據轉換為控制信號即可實現物流機器人識別和抓取運送等功能的運行。
該控制程序只有一個主程序但是搭配了多個子程序模塊。主程序即實現整個存取過程,其包含多個模塊,而每個子程序可重復調用,即子程序是完成存取過程中各個子動作的實現。為實現特定功能,在存取的過程中,由主程序可以調取運行子程序模塊,每個子程序都有設有固定的參數限制。
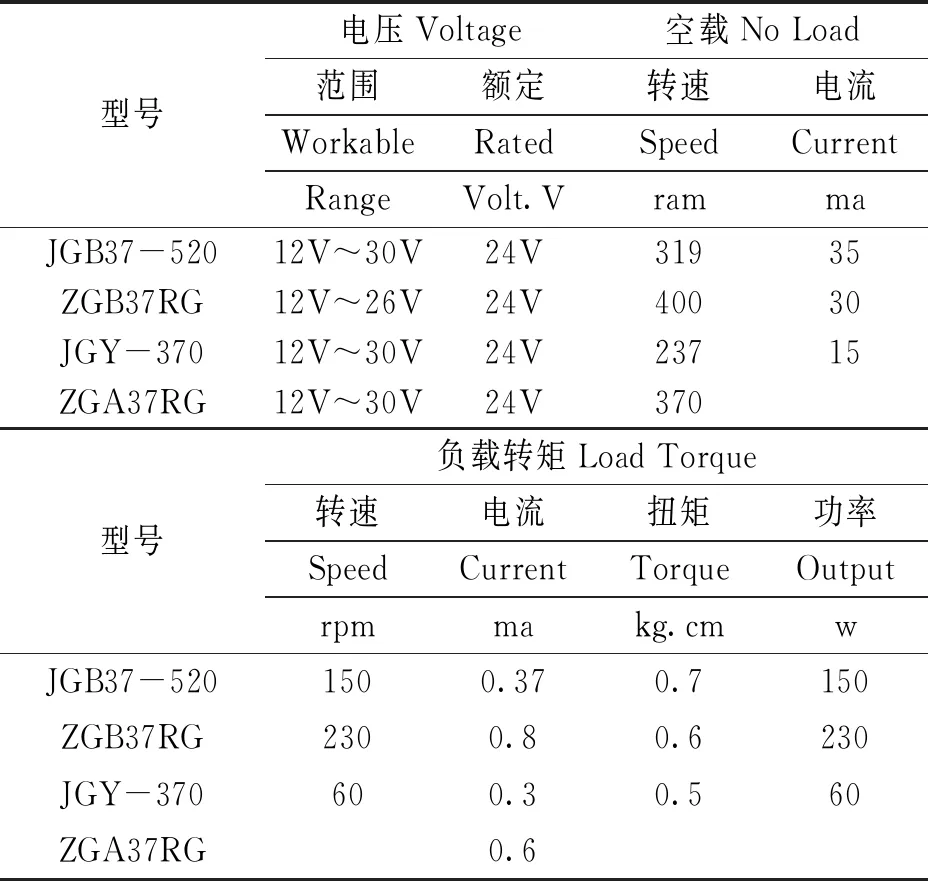
表1 電機選用型號
4.2 程序流程圖

圖7 程序流程
5 結束語
筆者在研究過程初始階段就對當今物流體系及環境需求等方面開展研究,確定了針對物流環境的末端配送問題的研究中心,在研究設計前總結了本文研究所需的大量物流行業相關專業知識。研究中期查閱研究討論了大量機械結構、電氣系統及編程思維的相關資料,設計出移動及搬運裝置的機械結構、電氣元件的選擇應用和整體系統的程序流程方案。在研究后期的實驗階段,我們經研究決定使用SolidWorks軟件進行模擬仿真以及設計制造模擬環境實驗所需的各種部件,并使用3D打印技術制造出實驗模型,在研究后期的系統調試階段經研究使用ROBO PRO軟件對物流機器人的控制系統編寫程序,并進行實驗和調試。
綜上所述,所設計出的物流機器人滿足設計要求,采用慧魚模型、三維建模以及3D打印技術和傳感器檢測技術等技術實現物流機器人的研究制造,要想進一步實現物流機器人的工作需求,需要進行模擬環境測試以及調試來達到預期的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49