基于ARM的嵌入式老人異常行為監測系統
2021-03-09 09:41:46劉佳琳
新型工業化 2021年1期
劉佳琳
(西安石油大學電子工程學院,陜西 西安 710065)
0 引言
當今社會不斷朝著智能化的方向發展,嵌入式設備也以智能化的方式逐漸提高大眾的生活質量。隨著消費電子的智能化,嵌入式更顯其重要性,例如日常生活中的手機、智能家居、無人機、汽車電子、家電控制系統、醫療儀器和航空設備等都是典型的嵌入式系統[1-3]。針對當今社會人口老齡化、老人因突發性疾病死亡等問題,本文提出基于嵌入式的老人行為異常監控系統。可有效解決獨居老人突發異常后意識喪失情況下不能得到及時救治的問題,對于保障獨居老人的生命健康。提升養老地產項目的智能化、舒適化,具有運行平穩,準確性高。運行速度快等諸多優勢[4-5]。
1 系統設計
1.1 系統總體框圖

圖1 系統框圖
1.2 整體思路
本系統主要運行于三星4412開發板上。共分為4個模塊:圖像采集模塊、圖像識別及跌倒檢測模塊、報警模塊、遠程網絡監控模塊。圖像采集模塊主要外接ov5640攝像頭進行圖像采集,通過壓縮后將視頻輸送給ARM;跌倒檢測模塊中圖像處理算法基于Open CV視覺庫和c++實現判斷老人跌倒行為的功能;報警模塊將跌倒檢測模塊提供的圖像利用GPRS傳送給老人子女,實現實時通知功能;遠程監控模塊利用sock網絡編程搭建web服務器模型,用戶可遠程通過網頁進行當前環境的監控。
2 系統關鍵模塊實現
2.1 視頻采集模塊
遠程圖像監控終端總體上可以分為五個部分:S3C4412控制器、存儲系統、電源模塊、圖像采集模塊和GPRS通信模塊。圖像采集采用USB攝像頭。視頻采集模塊利用高速A/D轉換芯片將模擬信號采集為數字信號,得到最后給用戶顯示的圖像。視頻采集模塊如圖2所示。

圖2 視頻采集模塊
2.2 圖像識別及跌倒檢測模塊
選用背景差分法和形態學算法提取目標骨架,骨架提取分為以下幾步:圖像灰度化,背景減除法提取人體輪廓,對圖像進行預處理,中值濾波,圖像二值化,canny算子進行邊緣檢測,形態學運算。然后用基于人體比例的方法初步判斷跌倒情況,進而采用基于人體外接矩形寬高比的精準判斷跌倒情況。圖像識別及跌到檢測模塊總體框圖如圖3所示。
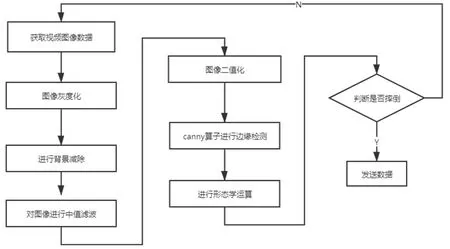
圖3 圖像識別及跌到檢測模塊總體框圖
2.2.1 圖像灰度化
在數字圖像處理中一般將各種格式的圖像轉化為灰度圖像以使后續的圖像的計算量少一些。灰度圖像的描述與彩色圖像一樣仍然反映了整副圖像的整體和局部的色度和高亮等級的分布和特征。采用加權平均法,即按照一定權值,對R,G,B的值加權平均,由于人眼對綠色最為敏感,紅色次之,對藍色的敏感性最低,因此使用該方法將得到最好效果的較易識別的灰度圖像。
2.2.2 圖像預處理
(1)圖像濾波。采用中值濾波對圖像進行處理。中值濾波是一種典型的非線性濾波技術,對濾除脈沖干擾及圖像掃描噪聲非常有效,也常用于保護邊緣信息。
(2)圖像二值化。灰度圖像大津法是按圖像的灰度特性,將圖像分成背景和目標兩部分。背景和目標之間的類間方差越大,說明構成圖像的兩部分的差別越大,當部分目標錯分為背景或部分背景錯分為目標都會導致兩部分差別變小。因此,使類間方差最大的分割意味著錯分概率最小。
(3)邊緣檢測。Canny的目標是找到一個最優的邊緣檢測算法,分為四步:消除噪聲、計算梯度幅值和方向、非極大值抑制、滯后閾值。其不容易受噪聲干擾,能夠檢測到真正的弱邊緣。優點在于使用兩種不同的閾值分別檢測強邊緣和弱邊緣,并且當弱邊緣和強邊緣相連時,才將弱邊緣包含在輸出圖像中[6]。
2.3 形態學處理
主要用于從圖像中提取對表達和描繪區域形狀有意義的圖像分量,使后續的識別工作能夠抓住目標對象最為本質的形狀特征,如邊界和連通區域等。分為腐蝕和膨脹兩種。
2.4 基于人體比例的初步跌倒檢測判斷
通過以上步驟可得到連通的人物區域,進而對目標區域按照從上到下、從左到右的方式進行行列掃描,設圖像中像素值為1的像素點坐標為(Χ,Y),對其進行數目計算,從而獲得x坐標的最大值Χmax和最小值Χmin,y坐標的最大值Ymax和最小值Ymin。由此可以得到運動目標人物區域的最小外接矩形框的左下角頂點的坐標為(X1,Y1),右上角頂點坐標為(Xr,Yr)。其中:

通過外接矩形的兩個頂點坐標,就可以得到寬高比值用作人體的輪廓特征。

由于人體具有一定的比例關系,例如,手臂在身體的上半部分,腳在身體的下半部分。可以想象,如果在某個區域內白點數(白色像素達標目標)比較多,則說明有肢體出現在該區域。如果事先能夠定義好所有可能的姿態集合,并根據每一個姿態確定其區域組合,即可實現先對姿態的判斷。該算法首先需要確定人體的標準位置,用紅色矩形框標出,計算出矩形框的高H和寬L,根據高寬的比例來判斷人體的姿態。
2.5 報警模塊
系統通過圖像的檢測及判斷,當老人發生異常狀況時,監控攝像機提取當前視頻的多幀圖像,通過GPRS將老人突發異常信息及當前視頻圖像傳輸給監護人,方便監護人員做出判斷。
2.6 遠程網絡監控模塊
利用socket網絡編程建立套接字,搭建b/s模型,使得監護人在網絡遠程實時觀測到室內情況,保證了老人生命財產安全。
3 實驗結果與分析
對上文所提到的算法在linux平臺進行實驗,得到處理后的圖像如下。

圖4 圖像處理結果
圖4(a)是攝像頭拍攝得到的原圖,圖4(b)是對圖像進行灰度化得結果,對圖4(b)進行中值濾波之后可以看出圖像變得平滑,如圖4(c),在對濾波過后的圖像進行二值化得到人物輪廓,效果如圖4(d)所示,再使用canny算子進行邊緣檢測,最后通過形態學運算采用膨脹的方式,得到圖4(g),再對圖4(g)中人體取得最小外接矩形,即可通過人體最小外接矩形寬高比判斷人體行為。

圖5 三種行為的高寬比變化過程折線圖
由圖5可知,從寬高比變化的幅度來分析,跌倒過程中的寬高比變化幅度是最大的,行走過程中的寬高比變化幅度是最小的,寬高比始終保持在0.7以上。而下蹲過程中的最大寬高比近似為最小寬高比的 3倍左右。從人體輪廓最小外接矩形的寬高比變化的速度來看,跌倒過程中寬高比變化持續的時間是相對比較長的,而且寬高比最后會下降至0.2以下。下蹲過程變化時間持續較短,后來又趨于平穩,最后寬高比平穩在0.25上下。通過分析不同行為過程序列的寬高比變化特征,可以得出寬高比變化的程度可以作為區分跌倒行為與其他行為的特征的結論。而判斷跌倒行為只需判斷其寬高比是否在0.2以下,若寬高比在0.2以下即可判斷為跌倒行為[7-8]。
4 結論
本文提出了一種基于嵌入式ARM開發平臺、Ope n CV視覺庫和C++,針對獨居老人無人照顧,跌倒無人幫助得問題,設計了一個可以實現遠程視頻監控、對視頻中老人進行形態分析,能在老人摔倒時及時給在外工作的家人通過GPRS模塊發送警報信息。而且該系統平臺價格低廉,用戶操作難度較低,具有良好的普適性。同時,本文提出的人體跌倒檢測算法在某些情況下還是存在一定的誤差,還需對該算法做出進一步優化,進一步完善跌倒檢測功能,使誤差概率降到最低。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
海峽科技與產業(2016年3期)2016-05-17 04:32:12