中低速磁浮列車懸浮系統預充電及起浮過程研究
2021-03-09 09:42:10周源
新型工業化 2021年1期
關鍵詞:指令
周源
(中車株洲電力機車有限公司,湖南 株洲 412001)
0 引言
磁浮列車初始為落浮狀態,通過司機操作或無人駕駛列車自動控制中心對列車激活上電,懸浮系統啟動,為磁浮車輛的懸浮運行做好準備。但懸浮系統需要做哪些準備,什么條件下列車可以下達起浮指令,以及車輛下達起浮指令后需要多久可以懸浮穩定達到可運行狀態,都是磁浮列車特別是無人駕駛情況下總體設計需要關注的問題。
1 總體過程
磁浮列車充電及起浮的總體過程包括:①磁浮列車激活上電后,懸浮系統懸浮控制器控制電路及主電路得電;②控制電路板通過程序控制接觸器動作,接入充電回路對支撐電容進行預充電,同時利用電壓傳感器實時監測充電電壓;③當支撐電容充電完成后,懸浮控制器進入起浮指令等待狀態;④同時車輛對車門、照明、蓄電池、制動、網絡、乘客信息系統等子系統進行狀態確認;⑤準備就緒后,車輛通過硬線向車輛懸浮控制器下達起浮指令;⑥各懸浮控制器利用分時起浮控制程序,結合懸浮點位所在的懸浮架和位置,逐步有序地執行起浮,直至所有懸浮點位實現穩定懸浮。上述過程中,各懸浮點位通過網絡實時反饋各自的落浮/起浮狀態。當所有懸浮點位的懸浮狀態完成后,列車方可啟動運行。
2 懸浮控制器預充電過程
在懸浮控制器正常工作前,需主電路支撐電容CE提前完成充電,為主電路提供支撐。若電源直接加載到支撐電容上,將會在瞬間產生較大的沖擊電流,可能對器件造成損傷。因此,在初始階段需要接入預充電電路進行限流充電[1]。
某型懸浮控制器預充電電路原理圖如圖1所示。主電路電壓為DC330V,支撐電解電容初始電壓為0,接觸器初始狀態均為斷開。懸浮控制器控制電路及主電路得電后,控制電路板通過程序將接觸器KM2閉合、KM1斷開,預充電回路導通工作。
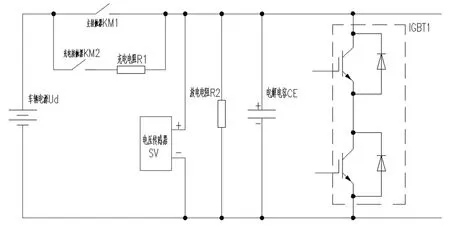
圖1 懸浮控制器預充電電路原理圖
根據電路原理,當電源U通過串接充電電阻R給初始電壓為0的電解電容C充電時,t時刻電解電容兩端電壓的表達式為:

一般情況下,為減小電流沖擊,預充電電壓宜達到電源電壓的80%~95%以上后切換至電源直接供電[2-3]。考慮上述電路中放電電阻的影響,若充電電壓百分比取80%,則其充電電壓應滿足:

則充電時間應滿足:

某型懸浮控制器在設計使用不同的元器件配置(表1)時,使用Multisim軟件仿真得到相應的充電電壓特性曲線如圖2所示。
上述序號靠前的元器件配置充電較快,但充電初始的電流沖擊較大。放電電阻應與充電電阻保持一定的比例,且放電電阻太大會使得電路放電過慢,放電電阻太小則在穩態狀態與電源存在一定的壓差。此外,充放電電阻的功率需滿足實際工作狀態,支撐電容需與系統電路匹配,太小則起不到支撐的作用。基于此,元器件配置應綜合進行考量。

圖2 不同元器件配置時的充電電壓變化特性曲線

表1 元器件配置表
若采用第③種元器件配置方案,則充電達到80%電源電壓的時間為t充=6.6s。實際過程中,由于電阻散熱功率和器件誤差可能出現一定范圍的波動。
實際中考慮電源電壓與支撐電容上電壓的壓差,減小瞬時電流沖擊,通常在懸浮控制程序檢測電壓達到預設值后延遲一定時間,如tdelay1=20s,再判定充電完成,同時由程序控制主接觸器KM1閉合、充電接觸器KM2斷開,完成電路切換。這樣,懸浮系統預充電的總時間為:T充=t充+tdelay1=26.6s。
3 分時起浮過程
磁浮車輛的起浮過程是從落浮狀態車輛起浮指令的發出到所有懸浮點位響應指令并達到穩定懸浮的過程。為避免所有懸浮點位同時執行起浮動作時對懸浮電源造成沖擊,可采用按懸浮點位逐個懸浮架延時分別起浮的方式進行起浮控制。實現上述分時起浮可通過車輛邏輯控制單元(VLCU)實現,也可通過終端懸浮控制器結合位置碼利用軟件方式進行控制實現[4]。其中后者可有效減少設備數量、減少車輛布線,有助于降低成本,也即是本文研究的對象。
如圖3,一列車按5個懸浮架來分析,并按懸浮架逐個分時起浮進行程序設定。車輛控制信號傳輸時間可以忽略不計,所有懸浮控制器在同時接受到起浮指令。每個懸浮控制器檢查到自己所在的懸浮架及位置編碼,通過程序預設的延時規則執行起浮程序(以下按延時間隔tdelay2=5s進行分析)。具體地,1號懸浮架上的懸浮控制器在接收到起浮指令后立即執行起浮程序;2號懸浮架上的懸浮控制器在接收到起浮指令后延時5s執行起浮程序;3號懸浮架上的懸浮控制器在接收到起浮指令后延時10s執行起浮程序;4號懸浮架上的懸浮控制器在接收到起浮指令后延時15s執行起浮程序;5號懸浮架上的懸浮控制器在接收到起浮指令后延時20s執行起浮程序[5]。

圖3 懸浮架的懸浮點位分布示意圖
通過上述分時起浮的設定,原來60個懸浮點位由同時起浮改為每次單個懸浮架4個懸浮點位同時起浮。起浮瞬間懸浮電源的負載約減少為原來的1/15,造成的電流沖擊大大減小,有助于延長設備的使用壽命。
圖4為一節車5個懸浮架代表點起浮過程中的懸浮間隙變化曲線,懸浮間隙按照分時起浮邏輯進行起浮(由于各懸浮點位存在初始起浮間隙等差異,曲線特征略有不同)。

圖4 懸浮點位分時起浮的懸浮間隙變化曲線
通過懸浮數據分析和實際運用經驗,懸浮點位按照程序執行起浮動作t起浮=7s后,懸浮間隙、懸浮電流已經趨于平穩,可認為懸浮已達到穩定狀態,并可認為每節車每個懸浮點位起浮時間相同。這樣,整個分時起浮過程耗時為:T分時起浮=5×tdelay2+t起浮=32s。
4 總結
將上述過程進行整理,中低速磁浮列車懸浮系統預充電及起浮過程如圖5所示。車輛懸浮系統供電后,約經26.6s懸浮控制器經將支撐電容的電壓充到接近電源電壓的可起浮狀態,與此同時車輛啟動各子系統進入就緒狀態,在懸浮起浮指令下達后,在約32s內全車各懸浮點位按照分時起浮時序設定依次從落浮狀態逐漸懸浮至穩定狀態,之后車輛方可牽引行駛。

圖5 懸浮系統預充電及起浮過程總圖
上述懸浮系統預充電及分時起浮過程為針對某型磁浮列車的分析研究,必要時可根據實際需要,結合懸浮控制器電路原理選擇合適的元器件配置來調整充電過程,通過調整分時起浮邏輯、懸浮控制程序及懸浮電磁鐵等來優化起浮過程。
5 結語
本文對中低速磁浮列車懸浮系統預充電及起浮過程進行了分析研究,有助于掌握車輛運行前懸浮系統相關的準備工作,為中低速磁浮列車的運行特別是無人駕駛情況下的系統設計提供了依據。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27