一種可上下移動的多噴頭智慧噴藥機設計*
2021-03-10 14:52:24崔雅筠
智慧農業導刊 2021年4期
朱 顏,崔雅筠
(聊城大學 機械與汽車工程學院,山東 聊城 252059)
水果業的發展對促進我國經濟的發展具有重要意義。噴藥能夠有效防止病蟲危害,有利于果樹的正常生長。市面上的噴藥機主要包括背負式噴藥機、車載式噴藥機、牽引式噴藥機等,這些噴藥機噴射范圍小、浪費人力且不利于噴藥人員的健康,不適合果樹的高效噴藥。
目前,美國等發達國家對噴藥機的研究成果已經處于先進水平。例如,Faial B S等人通過計算機系統的研究,改良了無人機噴藥路線,加強了無人噴藥技術的精確性[1];Tona E等人通過經濟技術分析,提出了以自主機器人平臺提高噴藥精度的思路[2];Berenstein R等人研究出了可調整噴嘴角度、根據識別目標改變噴涂直徑的農藥噴灑裝置,減少了農藥的浪費,提高了噴藥精度[3]。
近年來,我國對農業噴藥機的研究取得了一定成果。崔龍飛等人通過建模補償、算法研究,設計了有利于地面顛簸時保持噴藥平穩的雙鐘擺被動懸架式噴霧機噴桿[4];張勇[5]、殷長昊[6]、張巖[7]等課題組分別對噴藥裝置的控制系統進行了研究,為植保機器的智能化做出了貢獻;丁在興等人設計了一種通過紅外測距傳感器定位的適用于林區苗圃的小型自動噴藥機[8]。
綜上所述,國內外學者為加強噴藥機的智能化、自動化,對噴藥機的控制系統、噴藥結構進行了研究。作者在國內外研究成果的啟發下,擬設計一款基于計算機視覺的可上下移動的多噴頭智慧噴藥機,以適應果園作業的需求。
1 可上下移動的多噴頭智慧噴藥機的總體結構與工作原理
1.1 總體結構
可上下移動噴藥的多噴頭智慧噴藥機主要由行走裝置、儲藥裝置、噴藥裝置、電路與控制裝置組成,它的整體結構如圖1所示。
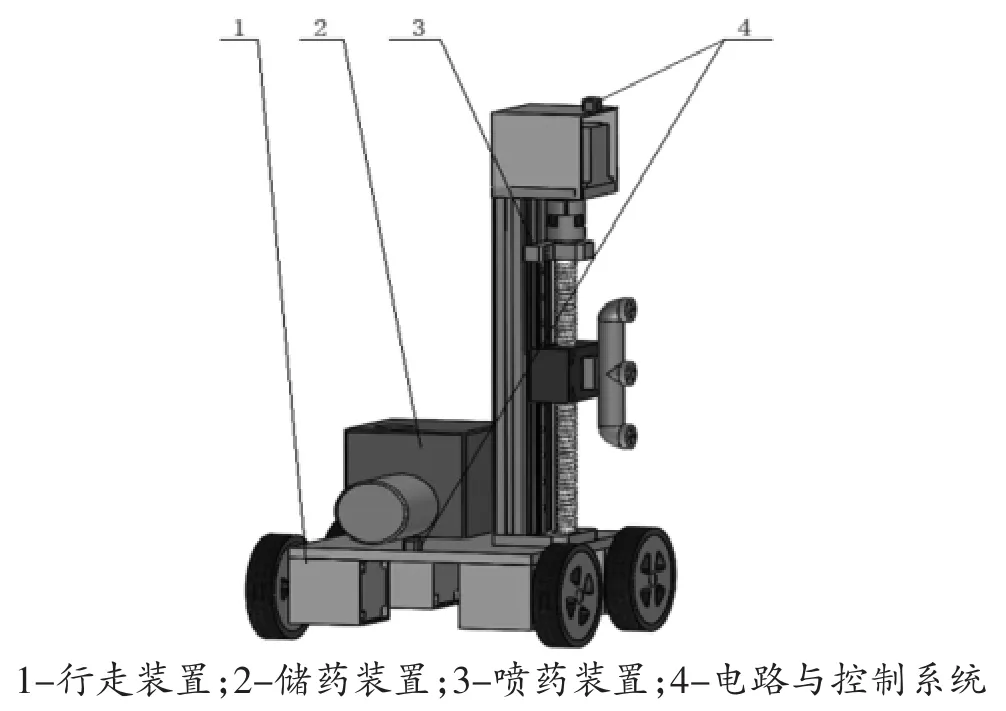
圖1 可上下移動的多噴頭智慧噴藥機的總體結構
1.2 工作原理
可上下移動噴藥的多噴頭智慧噴藥機的工作原理為:(1)啟動電源,發布指令后,步進電機驅動行走輪行走;(2)攝像頭負責識別路況、定位目標點并將信號傳給控制系統,定位到目標樹木后,行走輪停止;(3)移動裝置帶動連接桿勻速上升,以實現多噴頭自下而上霧化噴射藥物;(4)連接桿運動到最高限位點后,多噴頭停止噴射藥物;(5)移動裝置較快地帶動連接桿運動到最低限位點;(6)若繼續噴射下一目標,則重復以上命令;若噴射藥物任務結束,則回到初始點,停止作業。
2 可上下移動的多噴頭智慧噴藥機主要裝置的設計與分析
2.1 行走裝置的設計
可上下移動噴藥的多噴頭智慧噴藥機行走裝置的三維模型如圖2所示,其主要由行走輪、步進電機放置支架、步進電機、承重底板等組成。
行走裝置采用四個步進電機驅動四個行走輪完成行走作業,滿足控制噴藥機在目標點啟停的需求;承重底板作為噴藥機的主要承重單元,選用了抗壓性能好的合金鋼。
2.2 儲藥裝置的設計
可上下移動噴藥的多噴頭智慧噴藥機的儲藥裝置的三維模型如圖3所示,其主要由水泵、儲藥箱、軟水管組成。
塑料包括聚乙烯、聚丙烯等通用塑料,聚酰胺等工程塑料,光敏塑料等功能塑料。聚乙烯材料價格便宜、材料易得、耐腐蝕性強、緊密性好、使用壽命長,因此選用聚乙烯為儲藥箱的制作材料。儲藥箱容積為20L,可容納較多的藥液;箱內放置有濾網,以避免藥渣進入噴藥裝置中。
選用了直徑為16mm具有導水層、防爆層、皮膚層三層結構的軟水管,以增強水管的使用壽命。水管的一端與儲藥裝置的儲藥箱連接,另一端與噴藥裝置連接。
2.3 噴藥裝置的設計
可上下移動噴藥的多噴頭智慧噴藥機噴藥裝置的三維模型如圖4所示,其主要由移動裝置、噴頭連接桿、噴頭組成,移動裝置主要由步進電機和絲杠滑臺組成。
連接桿連接了絲杠滑臺和三個噴頭。在步進電機的驅動下,多噴頭在絲杠滑臺、連接桿的帶動下可實現一定高度范圍內的上下噴藥。
2.4 電路與控制系統的設計
電路與控制系統包括單片機最小系統、檢測系統、穩壓系統、電機驅動系統、藍牙通訊系統等電路系統。噴藥機運用C語言編寫控制程序將程序燒錄入STM51單片機后對整機進行控制,檢測系統將提取的圖像信息轉變為數據信息后傳給單片機最小系統,穩壓系統實現了電壓的穩定,驅動系統驅動步進電機工作,藍牙通訊系統接收通訊信號[9]。
2.4.1 穩壓系統的設計
在降壓電路中,采用LM2596芯片將DC24v電壓降至 DC12v、DC5v、DC3.3v,分別穩定傳輸給水泵、攝像頭、單片機;在升壓電路中,采用MOSFET管半橋驅動電路將DC24v電壓升至DC60v作為步進電機的工作電壓,滿足大功率驅動的要求[10-11]。
2.4.2 檢測系統的設計
為了實現自主檢測道路并規劃行走路線,增強噴藥目標的精確識別能力,可上下移動噴藥的多噴頭智慧噴藥機采用計算機視覺的方法提取圖像。
(1)圖像采集:主要包括兩個高清攝像頭,一個攝像頭負責拍攝前進道路的路況,另一個攝像頭負責拍攝目標樹木、定位噴射目標。
(2)圖像處理:攝像頭采集到的圖片信息采用卷積神經網絡技術(Convolutional Neural Networks,CNN)進行處理。
3 可上下移動噴藥的多噴頭智慧噴藥機關鍵部位的可行性分析
3.1 基于Matlab的振動分析
3.1.1 路面模型的搭建
為保證噴藥機行駛的平順性和噴藥的穩定性,運用濾波白噪聲法對路面進行路面不平度分析。根據路面的粗糙程度可將路面分為不同等級,噴藥機的作業環境為較為平整的土路,因此,按照B級路面的參數進行路面激勵分析[12-13]。
路面不平度數學模型如式(1)所示:

運用Simulink模塊建立路面不平度仿真模型,如圖5所示。
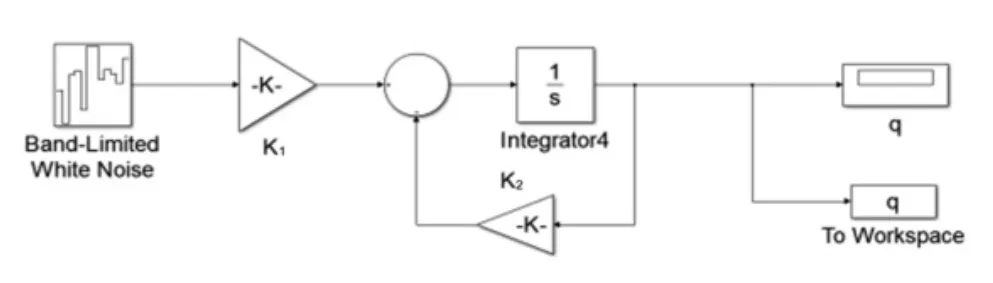
圖5 路面不平度的Simulink模型
路面不平度系數Gq(n0)在B級路面的上限為128×10-6m3,下限為32×10-6m3,幾何平均值為64×10-6m3,在計算Gain(增益)模塊時,Gq(n0)取64×10-6m3。當行駛速度分別為5m/s、15m/s、25m/s時,Gain 模塊 K1、K2的值,如表1 所示。
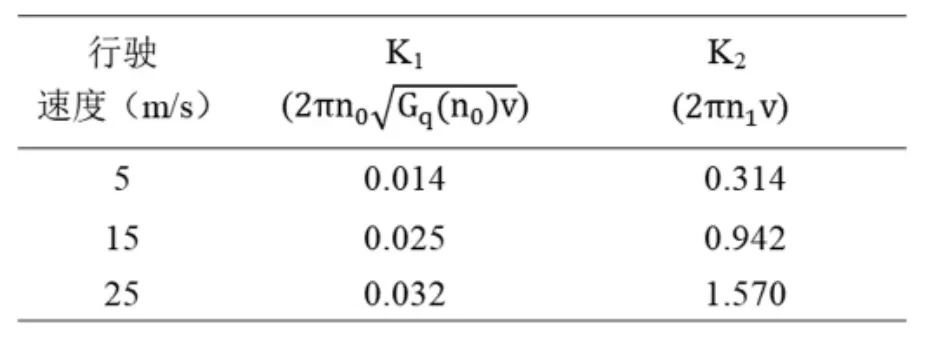
表1 增益K1、K2在不同行駛速度下的取值
將Band-Limited White Noise(限寬白噪聲)模塊的Noise power(噪聲功率)的值設為0.5,從而獲得單邊功率譜;按照表1對增益模塊進行設置。運行Simulink模塊、對圖像進行處理后,不同行駛速度下路面不平度隨時間的變化如圖6所示。
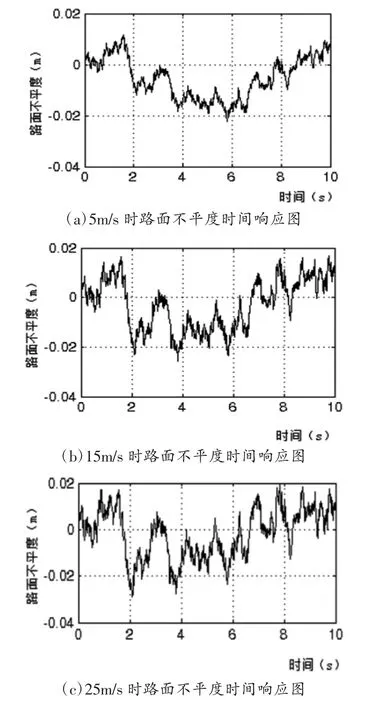
圖6 路面不平度隨時間響應圖
由圖6可知,行駛速度不同時對路面激勵的振動幅度有影響,但路面高度的變化幅度均在±0.04m之間,行駛速度對路面不平度的影響不明顯。因此,在對噴藥機進行振動分析時,不考慮行駛速度對振動的影響,選擇5m/s的速度進行分析,K1、K2的值分別設置為 0.014、0.314。
3.1.2 振動分析
將噴藥機簡化為1/4車身車輪二自由度力學模型進行振動分析,簡化模型圖如圖7所示。
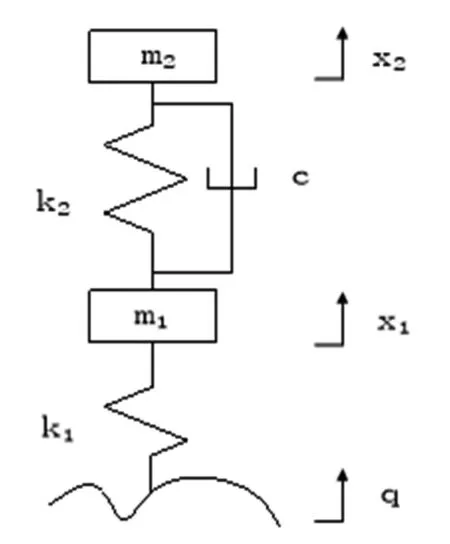
圖7 車身車輪二自由度簡化模型
根據圖 7 建立數學模型,如式(2)、(3)所示:

式中,m1為噴藥機車輪的質量(kg),k1為噴藥機車輪的剛度(N/m-1),m2為噴藥機其余部分質量(kg),k2為噴藥機車身底部懸架的剛度(N/m-1),c為阻尼(N/(m/s)),x1、x2分別為噴藥機車輪、噴藥機其余部分的振動位移(m),q為路面不平度。
噴藥機的性能參數如表2所示。

表2 噴藥機的性能參數
運用Simulink模塊搭建車身車輪二自由度仿真模型并設置合適的參數,如圖8所示。

圖8 車身車輪二自由度Simulink仿真模型
運行Simulink模塊、對圖像進行處理后,振動位移x1、x2,加速度a1、a2隨時間變化如圖 9所示。振動位移、振動加速度為矢量,數值代表大小,正負代表方向。

圖9 振動位移、加速度響應時間圖
通過Simulink模型的To Workspace模塊在Matlab的工作空間查看振動位移、振動機加速度的具體數值可知,噴藥機其余部分的振動位移x2的最大值為0.0221m,振動加速度a2的最大值為0.1973m/s2;噴藥機車輪的振動位移x1的最大值為0.0207m,振動加速度a1的最大值為0.1856m/s2。結合振動位移、振動加速度的最大值和圖9可知,噴藥機的平順性良好,能夠實現在果園中穩定行走的功能。
3.2 承重底板強度校核
行走裝置部分的承重底板是噴藥機的承重支撐單元,選用了抗壓性能較好的合金鋼。承重底板的強度對噴藥機的穩定性具有重要作用,因此,對其進行承重分析,校核其剛度是否滿足需求具有重要意義。
運用Solidwoks的Simulation模塊對承重底板進行了剛度校核。在儲藥箱裝配處施加200N豎直向下的載荷,噴藥裝置裝配處施加100N豎直向下的載荷,其von Mises應力分布云圖結果如圖10所示。

圖10 底板von Mises應力分布云圖
由圖10可知,承重底板受到的最大應力σmax為1.645×103N/m2,合金鋼的屈服力 σ 為 6.204×108N/m2,因為σmax<σ,所以底板滿足強度要求。
4 結束語
可上下移動噴藥的多噴頭智慧噴藥機克服了傳統噴藥機的缺陷,采用基于計算機視覺的方法識別路況、定位目標,采用絲杠滑臺升降的方式完成連接桿帶動多噴頭的上下移動噴藥。它對提升果樹產量、品質,減小噴藥人員負擔,有極大的幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
小天使·一年級語數英綜合(2014年6期)2014-07-22 23:32:38
計算物理(2014年2期)2014-03-11 17:01:44
智慧與創想(2013年7期)2013-11-18 08:06:04
