基于VGLESO和滑模理論的直流配電網(wǎng)母線電壓控制策略
2021-03-11 03:10:56韓永強徐明忻孫碣孫永輝趙立軍吳博寧
南方電網(wǎng)技術(shù) 2021年1期
韓永強,徐明忻,孫碣,孫永輝,趙立軍,吳博寧
(1. 國網(wǎng)內(nèi)蒙古東部電力有限公司經(jīng)濟技術(shù)研究院,呼和浩特010020;2. 天津理工大學(xué)電氣電子工程學(xué)院,天津 300384)
0 引言
國內(nèi)外研究表明,相比于交流配電網(wǎng),直流配電網(wǎng)在輸送容量、系統(tǒng)可控性、經(jīng)濟性以及供電質(zhì)量方面都具有更加優(yōu)越的性能[1 - 6]。
當(dāng)直流配電網(wǎng)與交流電網(wǎng)相連時,往往通過優(yōu)化三相AC-DC雙向變流器的控制電路來實現(xiàn)母線電壓的控制[7]。文獻[8 - 9]采用傳統(tǒng)比例積分雙環(huán)控制策略來抑制母線電壓的波動。PI控制器雖然在工業(yè)上得到了大范圍的應(yīng)用,并取得了良好的控制效果。但基于偏差控制原理的PI控制器,很難克服電容元件導(dǎo)致的控制時滯,從而無法滿足電力系統(tǒng)的動態(tài)性能要求。文獻[10 - 11]將模糊PI控制器應(yīng)用到了電壓外環(huán),提高了系統(tǒng)的控制精度和自適應(yīng)性。但仍未克服因電容兩端電壓不能突變導(dǎo)致的控制時滯。文獻[12 - 13]在雙閉環(huán)控制的基礎(chǔ)上引入了電流前饋控制,明顯提高了系統(tǒng)的動態(tài)響應(yīng),縮短了過渡過程時間。但電流前饋控制的實現(xiàn)需要增設(shè)額外的電流傳感器,增加了配電網(wǎng)的建設(shè)與維護成本。當(dāng)系統(tǒng)存在多個變流器時,電流傳感器的位置選取也變得十分困難。
滑模變結(jié)構(gòu)控制(sliding mode control, SMC)由于對系統(tǒng)數(shù)學(xué)模型要求不高,且對參數(shù)攝動、外部擾動具有較強的魯棒性,常被應(yīng)用于難以建立精確數(shù)學(xué)模型的非線性系統(tǒng)當(dāng)中[14]。但在傳統(tǒng)的滑模控制方法中, 需要較高的控制增益來提高系統(tǒng)的動態(tài)性能,過大的增益和控制的不連續(xù)性使得系統(tǒng)存在一定程度的抖振,嚴重影響了滑模控制在實際工程中的應(yīng)用。
LESO不僅能對系統(tǒng)中的各狀態(tài)變量進行準確的估計,還能對系統(tǒng)的總擾動進行實時跟蹤。為保證LESO具有較高的估計精度,往往采用較高的增益系數(shù),這導(dǎo)致了LESO在初始時刻的觀測值普遍存在峰化問題,影響了系統(tǒng)的啟動特性。針對高增益LESO存在的峰化問題,本文設(shè)計了一種VGLESO,其增益是一個時變函數(shù),在初始時刻增益系數(shù)為一個很小的值,隨著時間的推移,增益系數(shù)逐步變?yōu)楹愣ǔ?shù)。
在此基礎(chǔ)上,本文將滑模理論與VGLESO結(jié)合,提出了變增益滑模自抗擾控制策略。該控制策略不僅保留了滑模控制的強魯棒性,同時還減弱了系統(tǒng)的抖振,提高了系統(tǒng)的動態(tài)性能。最后,通過數(shù)字仿真驗證了該控制策略的可行性與真確性。
1 直流配電網(wǎng)AC-DC變換器數(shù)學(xué)建模
直流配電網(wǎng)AC-DC變換器的電路拓撲圖如圖1所示。圖中:ea,eb,ec為等效的三相交流電源;ia,ib,ic為交流側(cè)線路電流;R為線路等效電阻;L為線路等效電感;C為直流側(cè)穩(wěn)壓電容;Udc為直流側(cè)電容器兩端電壓;idc為直流側(cè)兩端電流;ic為流過電容器兩端的電流;iL是流經(jīng)負載兩端的電流;Load是直流配電網(wǎng)的等效負荷。
根據(jù)圖1所示的直流配電網(wǎng)AC-DC雙向變流器的電路拓撲結(jié)構(gòu),可得其數(shù)學(xué)模型:
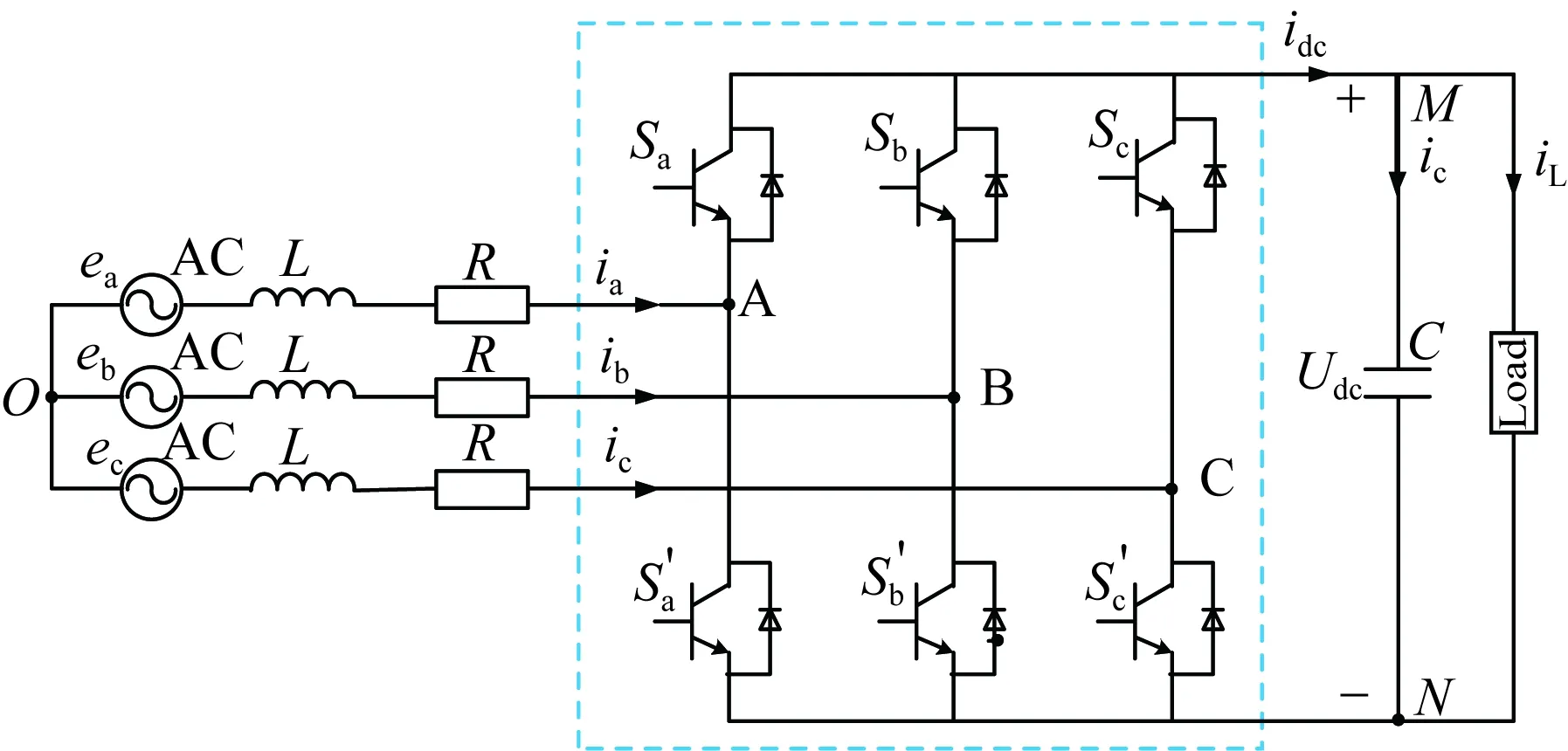
圖1 AC-DC變換器電路拓撲Fig.1 AC-DC converter circuit topology
(1)
式中Si為開關(guān)函數(shù),具體為:
(2)
三相靜止坐標系到兩相靜止坐標系變換的矩陣為:
(3)
兩相靜止坐標系到兩相旋轉(zhuǎn)坐標系變換的矩陣為:
(4)
式中θ為d軸超前a軸的角度。
坐標變換之后的直流配電網(wǎng)AC-DC雙向變流器的數(shù)學(xué)模型為:
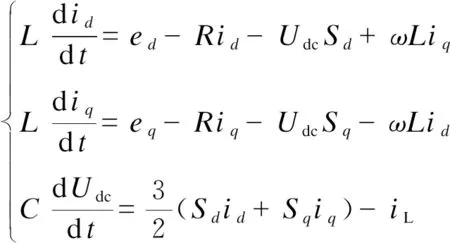
(5)
式中:ed、eq為三相交流電源ea、eb、ec在d軸和q軸的電壓分量;id和iq為三相電流ia、ib、ic在d軸和q軸的電流分量;Sd和Sq為開關(guān)函數(shù)Sa、Sb、Sc在兩相旋轉(zhuǎn)坐標系下的函數(shù)。
(6)
式(6)兩邊同時對時間t求導(dǎo)后,再聯(lián)立等式(5)可得:

(7)
從式(7)可知,直流配電網(wǎng)AC-DC雙向變流器可以看作是一個二階系統(tǒng)。對于一個可測的二階系統(tǒng),可以通過設(shè)計合適的線性擴張狀態(tài)觀測器來對系統(tǒng)的狀態(tài)變量和總擾動進行觀測。
2 LESO的觀測精度與初始峰化現(xiàn)象的矛盾分析
對于一個二階非線性系統(tǒng),有:
(8)


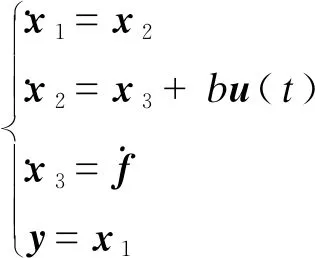
(9)
式中y為系統(tǒng)的輸出。
對應(yīng)的三階LESO為:
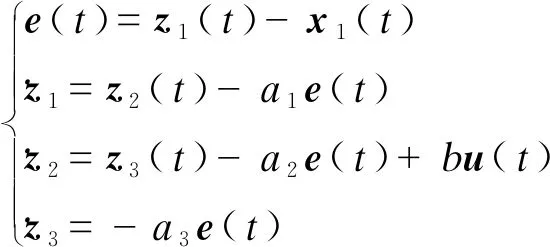
(10)
由式(10)可知:
(11)
進而整理得:
(12)
式中:z1(t)、z2(t)、z3(t)為擴張狀態(tài)觀測器的狀態(tài)變量;a1、a2、a3均大于0,為擴張狀態(tài)觀測器的誤差反饋增益。

3 變增益LESO的設(shè)計與收斂性證明
3.1 變增益LESO的設(shè)計
為了有效抑制高增益LESO在初始時刻輸出存在峰值的問題,本文設(shè)計了一種變增益LESO,其具體表達式如式(13)所示。
(13)
其中:
(14)
式中:bi用來限定時間t的取值;ni用來限制函數(shù)的凹凸性及凹凸程度;1是為了保證參數(shù)a1、a2、a3與高增益LESO的參數(shù)一致。使得變增益LESO既能有效的抑制初始峰值現(xiàn)象,又能保持傳統(tǒng)高增益LESO的高精度跟蹤性能。
傳統(tǒng)LESO的誤差反饋增益選取方法通常是采用極點配置[17]。
式(10)的特征方程為:
p3+a1p2+a2p+a3=0
(15)
將特征方程的極點配置在觀測器的帶寬ω0處,即:
p3+a1p2+a2p+a3=(p+w0)3
(16)
式中p為拉氏變換算子。
根據(jù)恒等式的性質(zhì),將式(16)展開得:

(17)
由此,就把原先對LESO的參數(shù)配置問題轉(zhuǎn)化為了對LESO帶寬的選取,降低了調(diào)參難度。
3.2 變增益LESO的收斂性證明
為了方便證明,取h1=α1,h2(t)=α2β2(t),h3(t)=α3β3(t),將式(13)變?yōu)椋?/p>
(18)
令
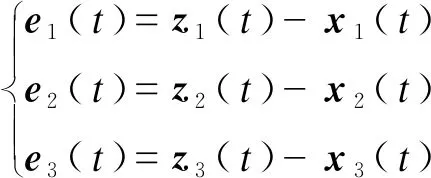
(19)
聯(lián)立式(8)(18)和(19)可得:
(20)
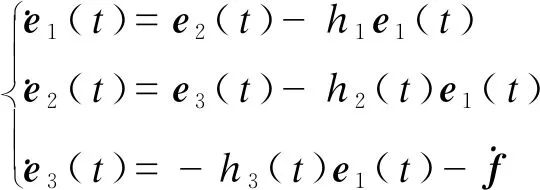
令
(21)
從而可以得到變增益LESO的誤差狀態(tài)方程為:
(22)
式(22)的特征方程為:
(23)
根據(jù)霍爾維茨穩(wěn)定性判據(jù),式(23)只需滿足以下條件就能保證式(22)在平衡點(e1(t)=0,e2(t)=0,e3(t)=0)是大范圍漸近穩(wěn)定的,也就是說變增益LESO能夠很好地跟蹤系統(tǒng)的狀態(tài)變量和擾動。
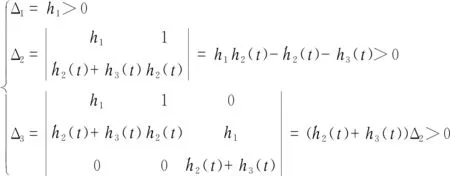
(24)
4 滑模自抗擾控制器的設(shè)計
為了獲得良好的控制效果,選擇直流配電網(wǎng)母線電壓誤差和電壓誤差的微分信號作為滑模函數(shù)的狀態(tài)變量。
選取滑模函數(shù)為:

(25)
根據(jù)霍爾維茨穩(wěn)定性判據(jù),只需要c>0, 式(25)就是大范圍漸近穩(wěn)定的。
上式中:
(26)
式中:Udcr為母線電壓額定值;Udc為母線電壓實時值。

(27)
根據(jù)式(7)知,可以將直流配電網(wǎng)AC-DC雙向變流器等效成為一個二階系統(tǒng)。對于一個可觀的二階系統(tǒng),可以通過式(13)來對其狀態(tài)變量和總擾動進行跟蹤觀測。具體的跟蹤方式如式(28)所示。
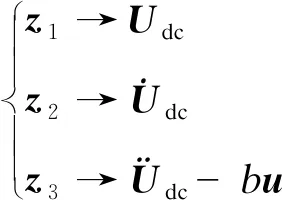
(28)
為了有效地抑制抖振,確保系統(tǒng)狀態(tài)變量能夠在有限的時間內(nèi)到達滑模面,本文采用指數(shù)趨近率來設(shè)計滑模控制器。具體形式由式(29)所示。

(29)
式中:ε>0,k>0。ε為系統(tǒng)狀態(tài)變量趨向滑模面的速度,如果ε值太小,那么系統(tǒng)由初始狀態(tài)到達滑模面所用時間就很長,如果ε值過大,又將會導(dǎo)致系統(tǒng)的抖振,不利于系統(tǒng)的穩(wěn)定。k為指數(shù)趨近項系數(shù),k值變大,將會縮短系統(tǒng)由初始狀態(tài)到到達滑模面所用時間,但k值的增大,將會減小“滑動模態(tài)”的存在區(qū)域。一般來說,為了達到良好的控制效果,在調(diào)參的過程中,如果增大了ε, 則需要相應(yīng)的減小k值。
聯(lián)立式(25—29)可得系統(tǒng)控制率為:
u=b-1(εsign(s)+ks-cz2-z3)
(30)
從式(30)可知,變增益滑模自抗擾控制律u由主要是由非線性的誤差反饋率u1(u1=b-1(εsign(s)+ks-cz2))和擾動補償項u2(u2=z3/b)組成。當(dāng)系統(tǒng)啟動時,母線電壓額定值與實時觀測值的差值較大,這時系統(tǒng)控制率主要是由非線性的誤差反饋率起作用,來確保系統(tǒng)具有良好的啟動特性。當(dāng)系統(tǒng)受到擾動時,擾動補償器能夠根據(jù)變增益LESO的觀測值迅速做出響應(yīng),擾動補償器的輸出值將直接作為電流內(nèi)環(huán)的參考值,克服了電容元件導(dǎo)致的控制時滯,提高了系統(tǒng)的動態(tài)性能。
圖2為變增益滑模自抗擾控制器的結(jié)構(gòu)示意圖,圖3為直流配電網(wǎng)AC-DC雙向變流器的控制結(jié)構(gòu)圖。
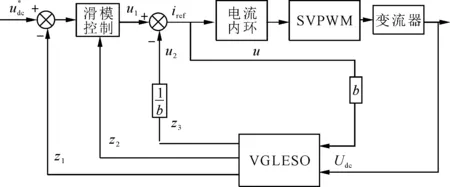
圖2 滑模自抗擾控制器結(jié)構(gòu)示意圖Fig.2 Structure diagram of sliding mode ADRC
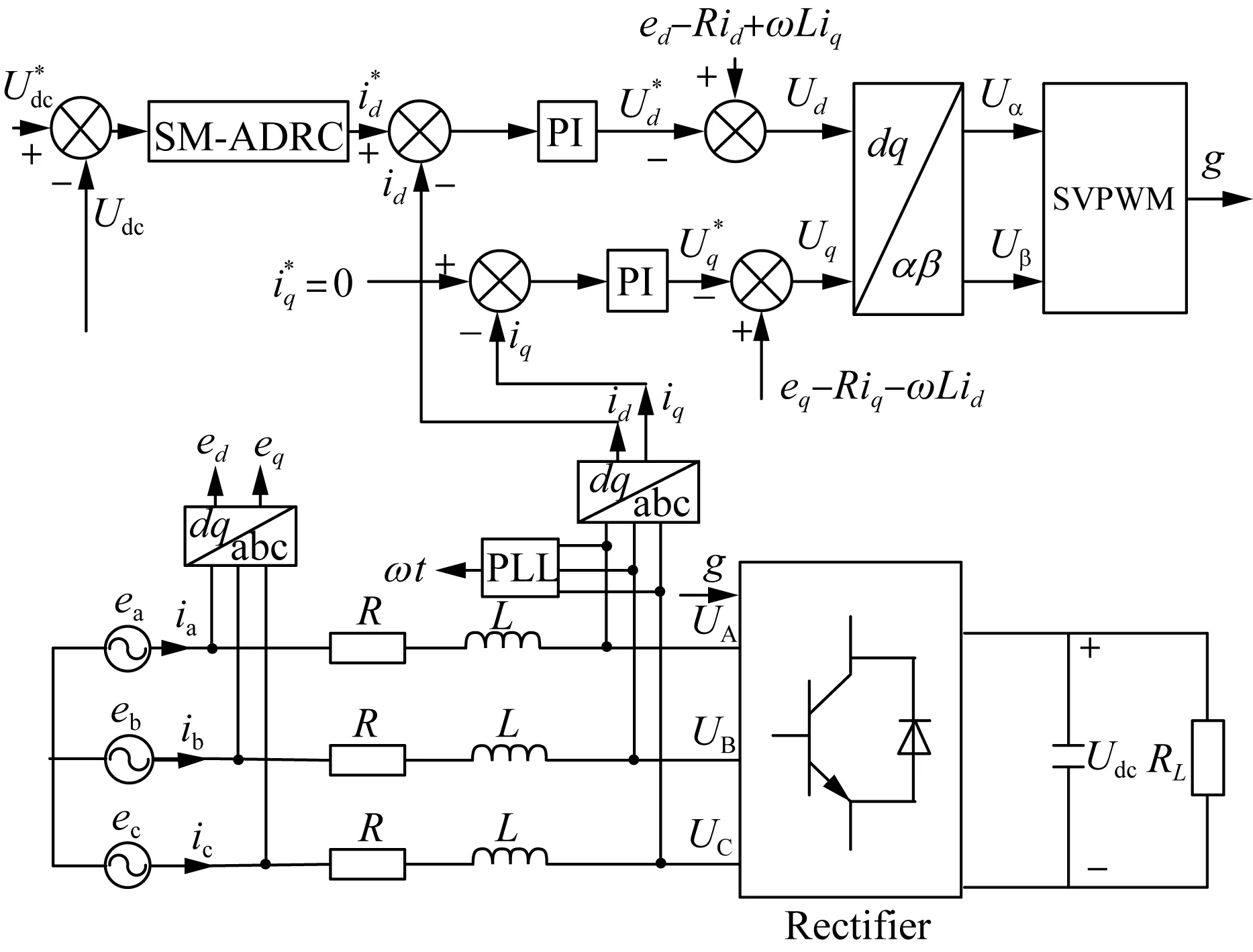
圖3 AC-DC變換器控制結(jié)構(gòu)圖Fig.3 Control structure diagram of AC-DC converter
以下為滑模控制器的穩(wěn)定性證明。
基于式(29)所示系統(tǒng),構(gòu)建式(31)所示Lyapunov函數(shù)。
V(s)=0.5s2
(31)
容易看出V(s)正定,且V(0)=0。進而可得:
(32)

綜上,根據(jù)Lyapunov第二方法[16]可知,式(29)在平衡狀態(tài)s=0處大范圍漸近穩(wěn)定,即無論初始電壓為何值,狀態(tài)變量都能在有限的時間內(nèi)到達滑模面。
5 仿真與分析
為了驗證VGLESO對初始峰值的抑制效果以及變增益滑模自抗擾控制器的控制效果,用MATLAB/Simulink 搭建了如圖4所示的直流配電網(wǎng)。系統(tǒng)參數(shù)和控制器參數(shù)如表1和表2所示。
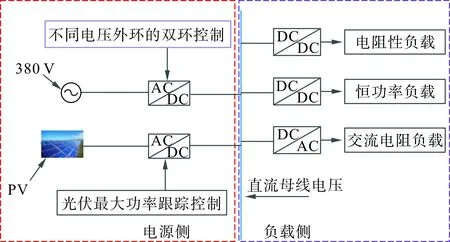
圖4 直流配電網(wǎng)Fig.4 DC distribution network
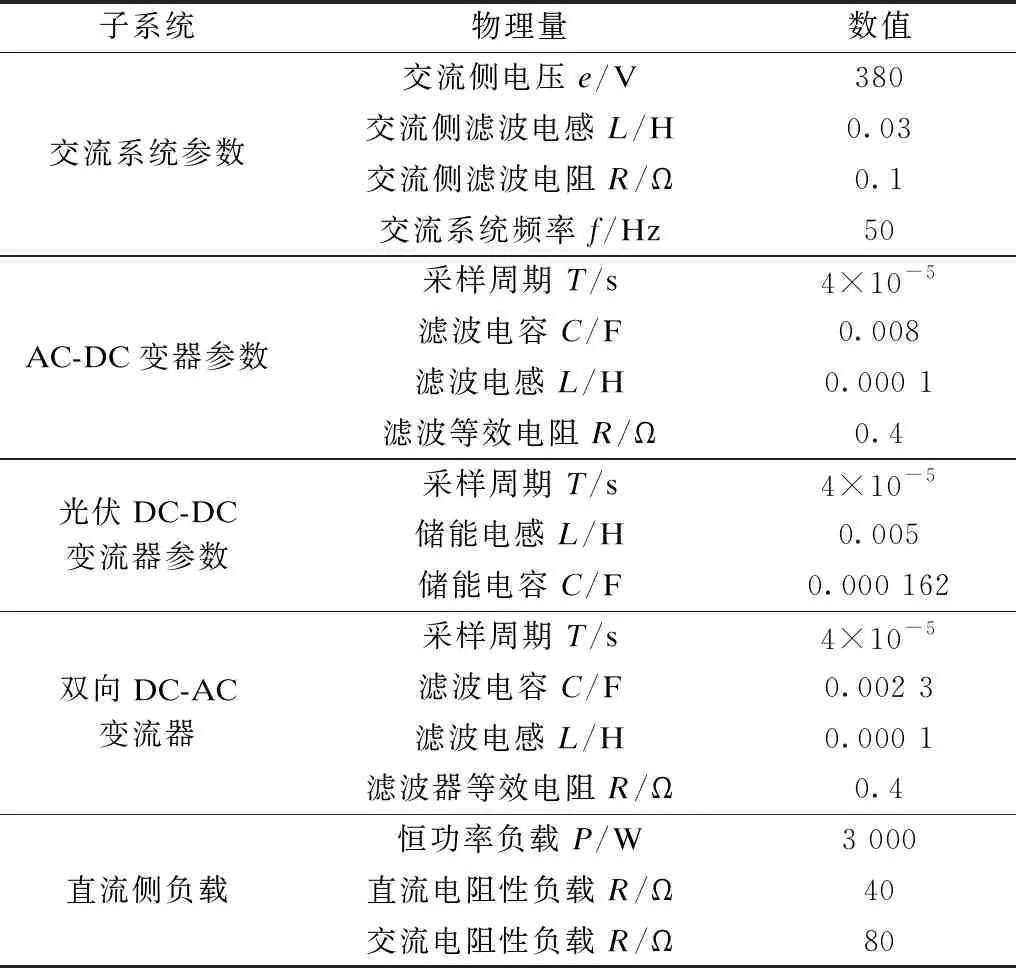
表1 系統(tǒng)參數(shù)Tab.1 System parameters
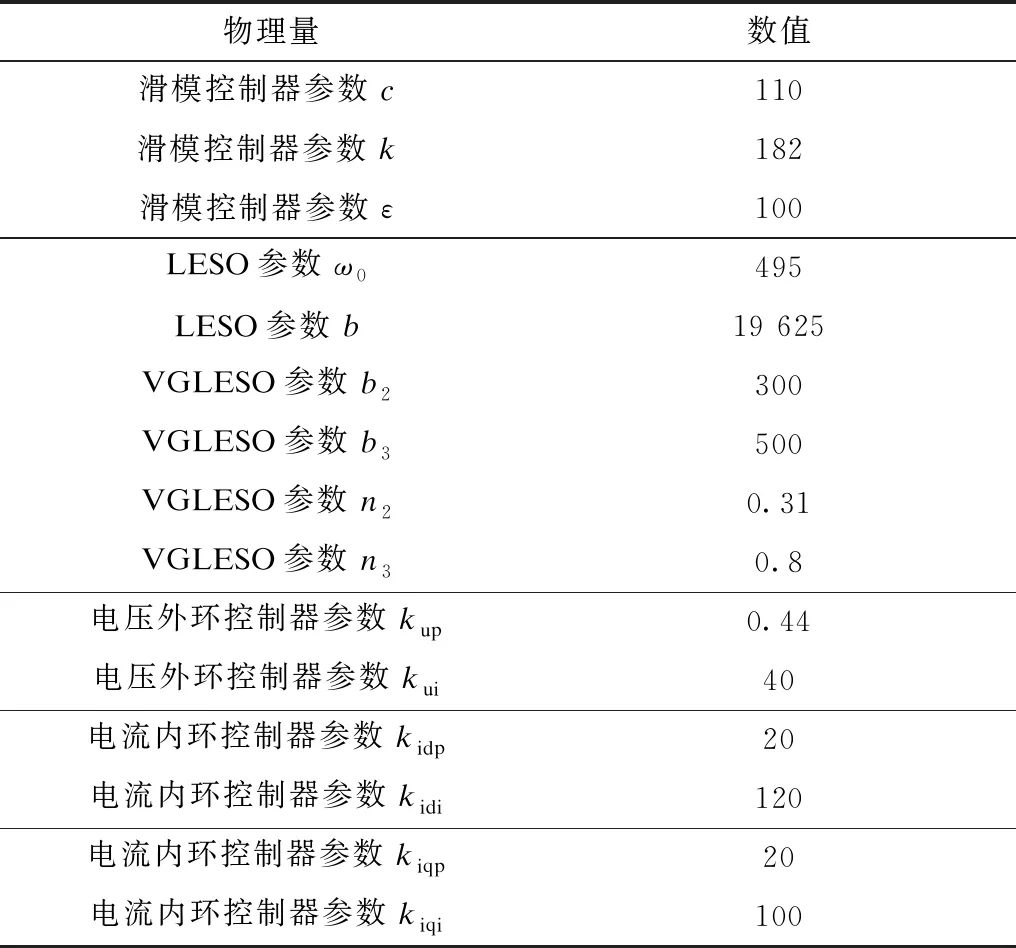
表2 控制系統(tǒng)參數(shù)Tab.2 Control system parameters
5.1 VGLESO對系統(tǒng)狀態(tài)變量的跟蹤性能分析
圖5為VGLESO和傳統(tǒng)高增益LESO對系統(tǒng)狀態(tài)變量Udc的跟蹤曲線圖。從圖中可以看出,在保證相同跟蹤精度的前提下,VGLESO有效地削弱了高增益LESO的初始峰值現(xiàn)象。
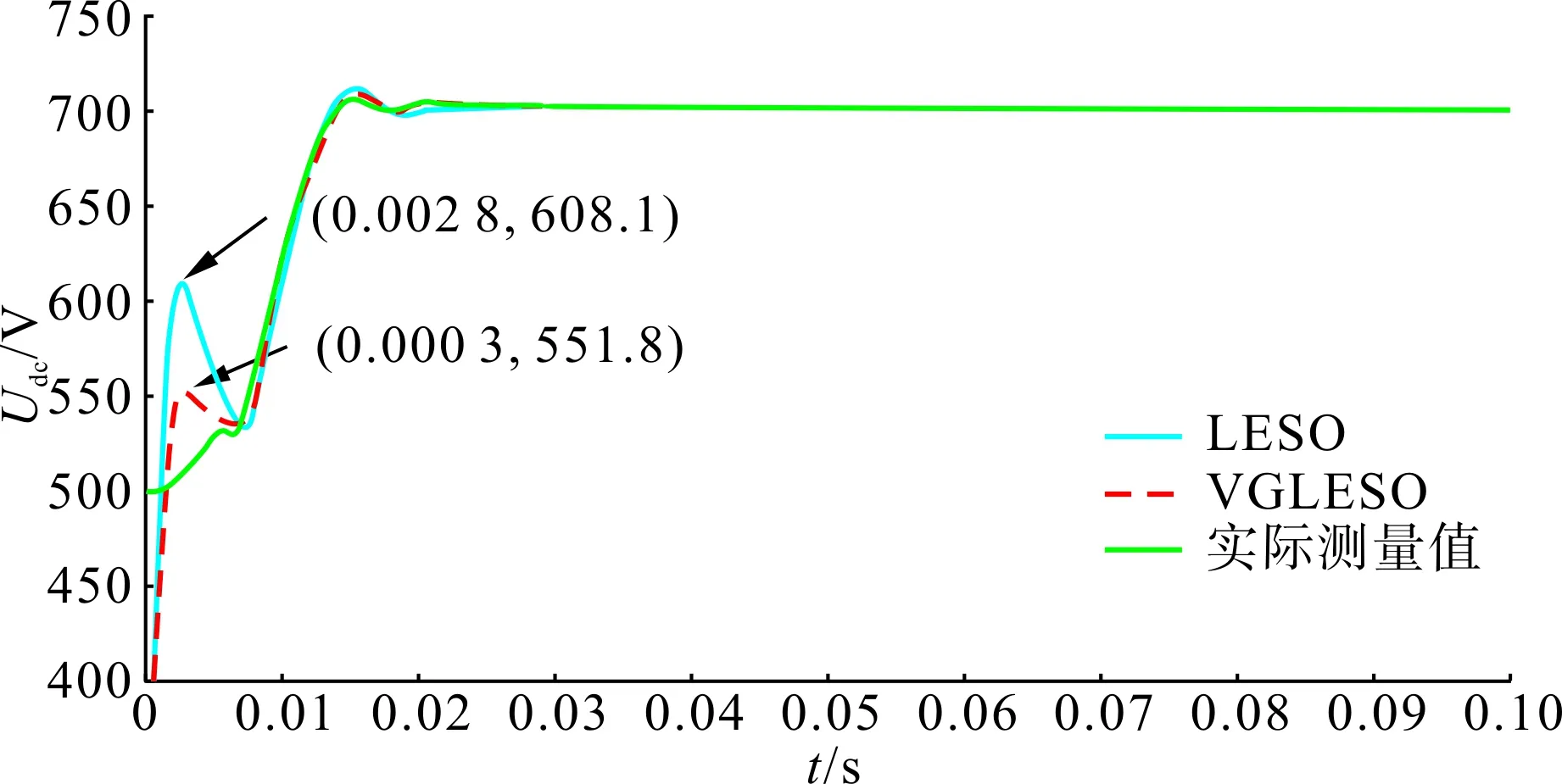
圖5 狀態(tài)變量x1 (Udc)的跟蹤曲線Fig.5 Tracking curves of state variablex1 (Udc)

5.2 滑模自抗擾控制器的控制性能分析
為了驗證滑模自抗擾控制器的控制效果,進行了如下仿真實驗。
1)工況一:系統(tǒng)在正常運行的前提下,在0.25 s的時候直流側(cè)電阻性負載突然減半。
2)工況二:系統(tǒng)在正常運行的前提下,在0.45 s的時候直流側(cè)恒功率負載突然減半。
3)工況三:系統(tǒng)在正常運行的前提下,在0.6 s的時候a相電壓突然發(fā)生跌落,持續(xù)時間為0.1 s。
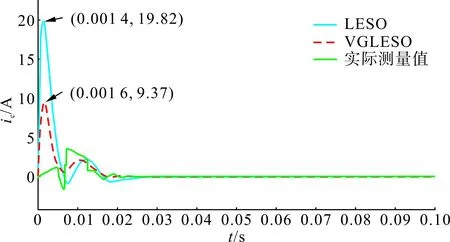
圖6 狀態(tài)變量x2 (ic)的跟蹤曲線Fig.6 Tracking curve of state variablex2 (ic)
在上述工況下,電壓外環(huán)分別采用了PI控制策略,傳統(tǒng)滑模自抗擾控制策略以及變增益滑模自抗擾控制策略。3種控制策略下的直流配電網(wǎng)母線電壓波動情況圖如圖7所示。

圖7 母線電壓總體波動情況Fig.7 Overall fluctuation of bus voltage
下面將從以下幾個方面詳細介紹3種控制策略的優(yōu)缺點。
圖8為雙向AC-DC變流器采用不同控制策略啟動時的母線電壓波形圖。從圖中可知,一方面,兩種控制器控制下的系統(tǒng)上升時間是相同的,但二者的超調(diào)量卻相差甚大,其中,變增益滑模自抗擾控制器控制下的系統(tǒng)的超調(diào)量幾乎為0,而傳統(tǒng)滑模自抗擾控制器控制下的系統(tǒng)的超調(diào)量為3.2%。另一方面,變增益滑模自抗擾控制器控制下的系統(tǒng),當(dāng)母線電壓到達額定電壓700 V時,就基本維持在額定電壓附近,幾乎無暫態(tài)過程,而傳統(tǒng)滑模自抗擾控制器控制下的系統(tǒng)還需要經(jīng)過一系列的過渡過程才能維持在額定電壓附近。綜上所述,變增益滑模自抗擾控制器的啟動性能要優(yōu)于傳統(tǒng)滑模自抗擾控制器。
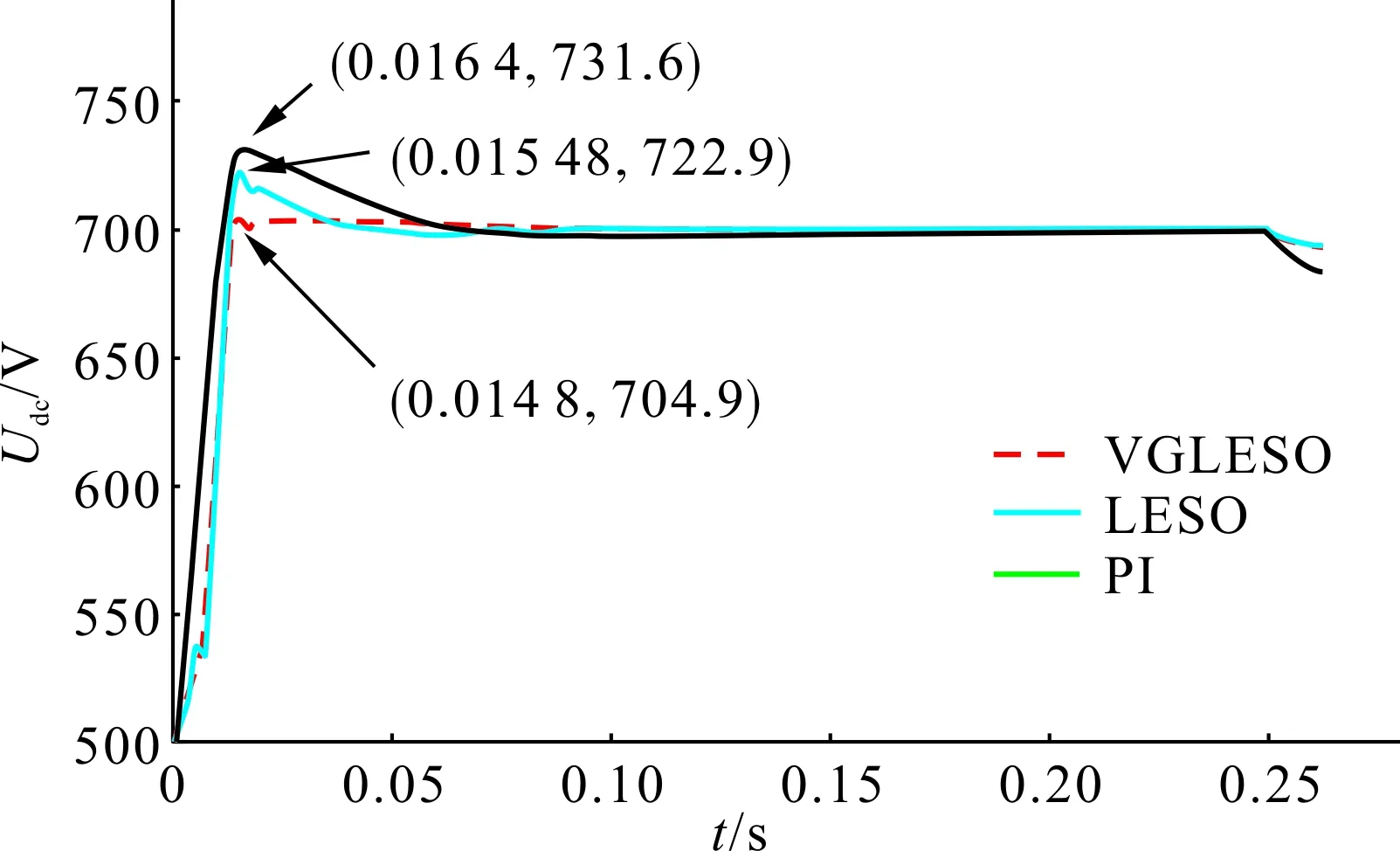
圖8 啟動特性Fig.8 Starting characteristics
當(dāng)負載電流突然減小時,由于電容兩端的電壓不能突變,所以直流側(cè)電流idc的變化要滯后于負載電流iL的變化,因此流過電容兩端的電流ic要減小。根據(jù)式(33)可知母線電壓要發(fā)生跌落。
(33)
式中:t0為電容充放電時刻;Δic為電容兩端電流變化量。
從圖9和圖10可知,變增益滑模自抗擾控制器的控制性能這時已經(jīng)和傳統(tǒng)高增益滑模自抗擾控制器的控制效果保持一致,兩者的過渡過程時間和電壓振蕩范圍都要小于PI控制策略。因此變增益滑模自抗擾控制策略在荷擾動下能夠很好的抑制直流母線電壓波動,縮短系統(tǒng)的過渡過程時間。
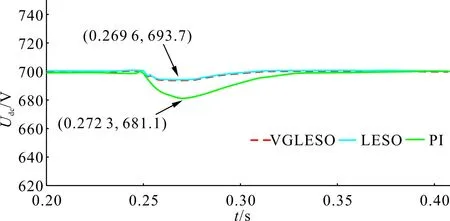
圖9 電阻性負載突然減半母線電壓波動圖Fig.9 Bus voltage fluctuation diagram with resistance load suddenly halved
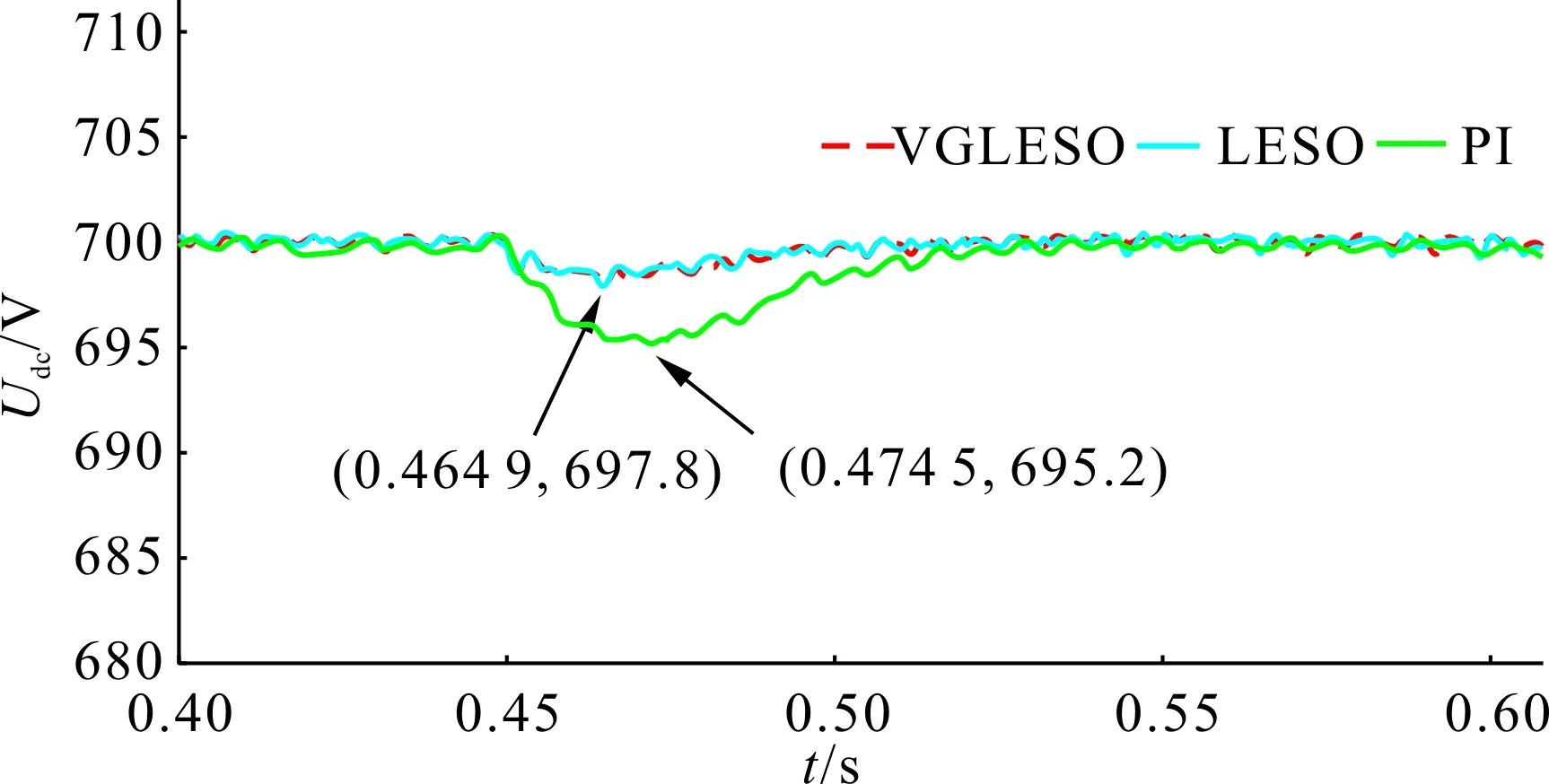
圖10 恒功率性負載突然減半母線電壓波動圖Fig.10 Bus voltage fluctuation diagram of with constant power rate load suddenly halved
從圖11和12可知,當(dāng)三相系統(tǒng)不平衡時,變增益滑模自抗擾控制器的電壓波動更小;當(dāng)三相系統(tǒng)重新平衡時,滑模自抗擾控制器的超調(diào)和快速性均優(yōu)于PI控制器。因此變增益滑模自抗擾控制策略在交流電網(wǎng)發(fā)生不平衡時可以很好地穩(wěn)定公共直流母線的電壓,保證系統(tǒng)能夠以較快的速度恢復(fù)穩(wěn)定。
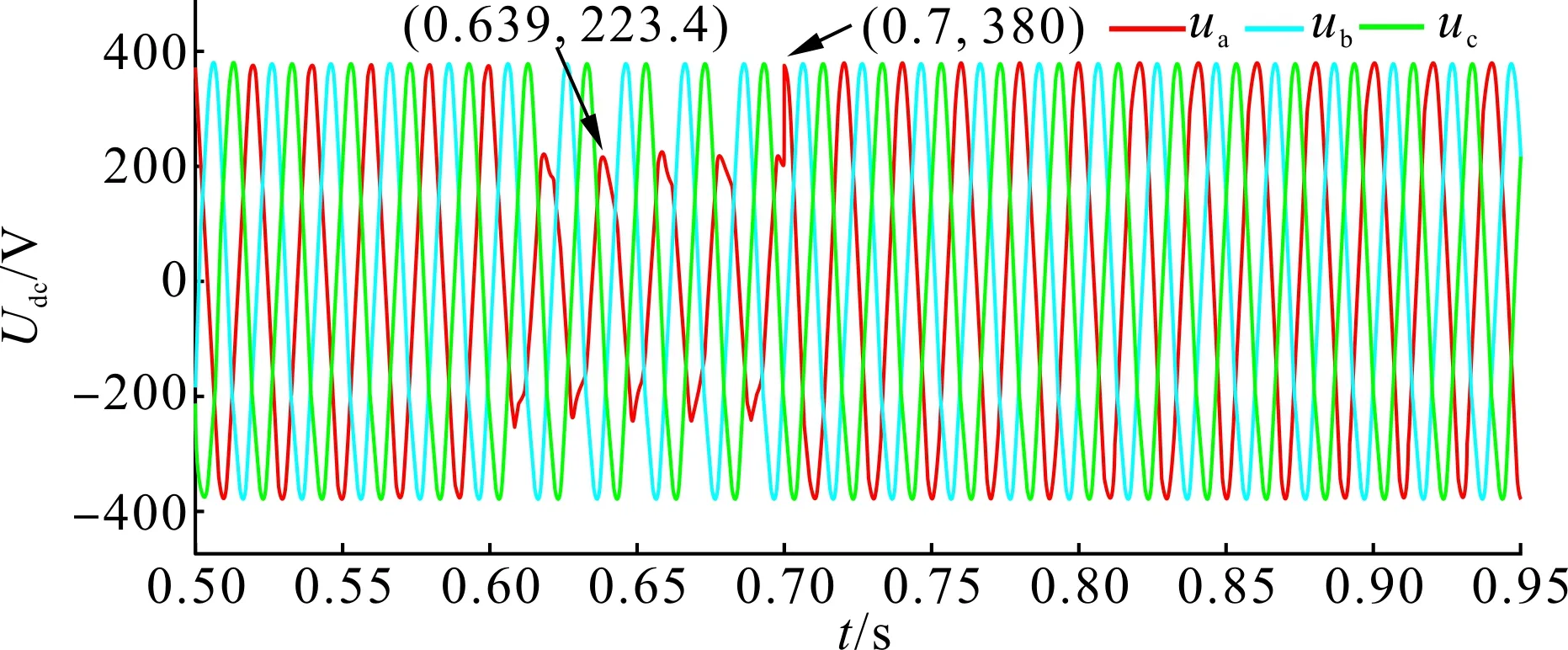
圖11 三相電壓波形Fig.11 Three-phase voltage waveforms
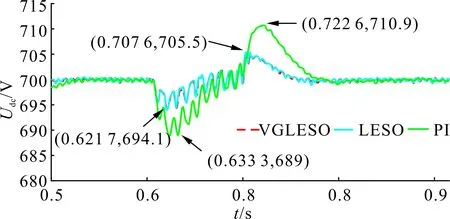
圖12 三相電壓不平衡時的母線電壓Fig.12 Bus voltage in case of three-phase voltage imbalance
6 結(jié)論
本文針對直流配電網(wǎng)AC-DC變換器的數(shù)學(xué)模型,考慮到高增益LESO存在的初始峰值問題,設(shè)計了一種變增益LESO來對系統(tǒng)的狀態(tài)變量和總擾動進行跟蹤估計,證明了變增益LESO的收斂性。在此基礎(chǔ)上,進一步結(jié)合滑模理論設(shè)計了變增益滑模自抗擾控制律,并證明了系統(tǒng)的穩(wěn)定性。
仿真結(jié)果表明,與高增益LESO相比,本文設(shè)計的變增益LESO不僅能夠有效地削弱初值峰化現(xiàn)象及影響,而且還能保持高增益LESO的高觀測精度。基于變增益的滑模自抗擾控制器能夠在不需要額外電流傳感器器的情況下就能夠很好地抑制直流配電網(wǎng)各種工況下的擾動,提高了控制系統(tǒng)的動態(tài)品質(zhì)和配電網(wǎng)系統(tǒng)的供電可靠性。同時,由于變增益滑模自抗擾控制器的設(shè)計不依賴于系統(tǒng)的結(jié)構(gòu)和參數(shù),使得其具有較強的魯棒性和可移植性,特別是針對難以建立精確數(shù)學(xué)模型的非線性系統(tǒng)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
經(jīng)濟技術(shù)協(xié)作信息(2018年32期)2018-11-30 01:43:16
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電測與儀表(2016年5期)2016-04-22 01:14:14
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
