基于改進YOLOv3的輸電線路缺陷識別方法
2021-03-11 03:11:18陳嘉琛俞曜辰陳中韓衛(wèi)
南方電網(wǎng)技術 2021年1期
關鍵詞:模型
陳嘉琛,俞曜辰,陳中,韓衛(wèi)
(1. 東南大學吳健雄學院,南京211189;2. 東南大學電氣工程學院,南京210096;3. 深圳市多翼電智科技有限公司, 南京211100)
0 引言
近年來,隨著無人機巡檢輸電線路缺陷技術研究的不斷深入,該技術的應用場景不僅限于實驗室運行的理論場景,又逐漸向?qū)嶋H應用的現(xiàn)實場景轉(zhuǎn)變,但此過程卻逐漸暴露出許多問題。試運行現(xiàn)場樣本量較為固定,測試樣本與訓練樣本相似,且需較長計算時間,而實際應用現(xiàn)場巡檢范圍廣,拍攝樣本種類多變且數(shù)量較少,所以試運行現(xiàn)場使用的一些基礎圖像識別算法逐漸顯現(xiàn)出較多問題,例如過擬合、對硬件要求高、計算耗時長等,導致實際應用缺陷診斷效果不佳。因此,研究適應輸電線路巡檢實際應用現(xiàn)場的改進圖像識別算法對巡檢技術發(fā)展具有重要意義。
目前,機器學習圖像識別算法大致分為兩類,分別為基于候選區(qū)域的機器學習圖像識別算法和基于回歸的機器學習圖像識別算法[1 - 3]。基于候選區(qū)域的機器學習圖像識別算法,主流的有更快的基于區(qū)域的卷積網(wǎng)絡(faster region-based convolutional network,F(xiàn)aster R-CNN)[2]、掩膜基于區(qū)域的卷積神經(jīng)網(wǎng)絡(mask region-based convolutional network,Mask R-CNN)等,此類算法擁有訓練模型識別精度高的優(yōu)點;基于回歸的機器學習圖像識別算法較為典型的有YOLO系列等,此類算法擁有訓練模型檢測速度快的優(yōu)點,但此兩類算法的訓練模型均存在對硬件要求高、計算耗時過長等問題。為了解決這些算法存在的問題,文獻[4 - 9]分別提出了對YOLOv3的多種改進方法。其中文獻[4]在YOLOv3的網(wǎng)絡結(jié)構(gòu)中添加卷積層模塊,并粗略調(diào)整特征圖上的錨框大小;文獻[5]對YOLOv3網(wǎng)絡重新組合,使之包含多錨點檢測機制和卷積投票網(wǎng)兩個模塊以用于評價空氣質(zhì)量;文獻[7]提出了一種通過k-means維度聚類改進YOLOv3網(wǎng)絡的方法,應用于不同場景下共享單車運行狀態(tài)的檢測。文獻[10]提出了對Faster R-CNN的改進方法,采用深度殘差網(wǎng)絡(residual network50,ResNet50)對原圖逐層進行特征提取,得到最高層特征圖后,使用反池化法得到低特征圖,最后兩者融合進行邊框回歸得到結(jié)果。
上述文獻對于圖像識別算法的改進大多以提升識別精度為目標,但輸電線路巡檢現(xiàn)場樣本種類復雜和車載計算機計算能力有限的問題依舊存在,且目前涉及此類問題的解決辦法也存在一定局限。文獻[11]提出了在內(nèi)存和算力受限的條件下,利用輕量化網(wǎng)絡代替YOLOv3的特征提取網(wǎng)絡以實現(xiàn)目標高效檢測。但此方法所應用的遙感目標檢測領域目標簡單單一,不同于電力設備的種類繁多、大小不一,因此該輕量化網(wǎng)絡實際應用于輸電線路巡檢可能導致缺陷診斷效果不佳。而文獻[12]利用k-means++算法確定先驗框,基于 YOLOv3 檢測架構(gòu)構(gòu)建了一種改進的輕量級網(wǎng)絡以進行絕緣子缺陷檢測,但是這種方法只應用于絕緣子這一種電力設備,沒有全面考慮到巡檢現(xiàn)場各類電力設備。
綜上,針對目前利用機器學習圖像識別算法進行電力系統(tǒng)巡檢存在的問題,本文提出了一種基于改進的YOLOv3框架識別輸電線路設備故障缺陷算法模型,對基于回歸的深度學習算法YOLOv3進行改進,以適應輸電線路巡檢實際應用現(xiàn)場。該模型對基于Darknet- 53框架的YOLOv3算法進行了改進,對YOLOv3進行了通道減少、框架瘦身的剪枝處理,并于特定卷積層后添加了SPP模塊,從而進一步優(yōu)化了YOLOv3的輕量化性能,與文獻[12]輕量級算法不同之處在于改進更加簡明,對圖像預處理要求不高。輕量化處理后的該模型覆蓋輸電線路中的電力設備種類較為齊全,適用于輸電線路巡檢現(xiàn)場中因無人機拍攝圖片數(shù)量較少、角度偏差等原因造成的有效樣本圖片數(shù)量不足的情況,減少了對車載服務器的計算力需求,即降低了實現(xiàn)YOLOv3算法的硬件要求。
1 YOLOv3及相關技術介紹
1.1 YOLOv3神經(jīng)網(wǎng)絡
YOLOv3神經(jīng)網(wǎng)絡的結(jié)構(gòu)由Darknet- 53卷積神經(jīng)網(wǎng)絡和檢測網(wǎng)絡兩部分組成,其中Darknet- 53網(wǎng)絡結(jié)構(gòu)用于提取特征。圖1展示了Darknet- 53的結(jié)構(gòu),其使用了連續(xù)的3 × 3和1 × 1卷積層以及大量殘差的跳層連接,這種特征使其在精度與ResNet-152[13]接近的同時,提高了檢測速度。YOLOv3神經(jīng)網(wǎng)絡的識別結(jié)果以識別框的形式展現(xiàn),每個識別框包括3類信息,分別為識別框的位置(中心坐標(x,y)、框的高度h和寬度w)、此識別框的置信度(confidence)以及識別圖像的類別。

圖1 Darknet- 53結(jié)構(gòu)Fig.1 Structure of Darknet- 53
1.2 SPP模塊
SPP模塊利用了空間金字塔池化模型[14],將圖片從精細空間劃分到粗糙空間中,并聚集其局部特征。SPP模塊結(jié)構(gòu)圖如圖2所示,本文所使用的SPP模塊包含了4個并行的內(nèi)核大小分別為1×1,5×5,9×9,13×13的最大值池化(Maxpool)層,對于輸入大小為512×512的特征圖,通過SPP模塊,特征映射被轉(zhuǎn)化成了一個(169+81+25+1)×512的矩陣,輸入到后面的1×1卷積層中,擴展為一維矩陣,從而形成固定大小的特征向量輸出。

圖2 SPP模塊結(jié)構(gòu)圖Fig.2 SPP module structure
1.3 卷積神經(jīng)網(wǎng)絡剪枝技術
卷積神經(jīng)網(wǎng)絡的剪枝技術大致分為權(quán)重剪枝和結(jié)構(gòu)化剪枝兩類。權(quán)重剪枝是指修剪不太重要的、較小的權(quán)重連接,此方法修剪權(quán)重連接后使得神經(jīng)網(wǎng)絡體系不規(guī)則,導致難以存儲新的模型,且對硬件要求極高,故不被經(jīng)常采用。結(jié)構(gòu)化剪枝是指在保留規(guī)則的神經(jīng)網(wǎng)絡體系前提下,通過稀疏訓練和結(jié)構(gòu)化稀疏正則化[15]等手段刪除存有大量冗余參量、對預測結(jié)果影響小的卷積層通道,以減少迭代計算次數(shù)。出于對需要完整模型結(jié)構(gòu)的考慮,本文采用的是結(jié)構(gòu)化剪枝。
2 輸電線路缺陷識別神經(jīng)網(wǎng)絡算法設計
2.1 添加SPP模塊
在無人機巡檢輸電線路的過程中,無人機所拍的圖片數(shù)據(jù)大小常常是不固定的,若如YOLOv3原網(wǎng)絡中的對圖片進行切割變形,很可能會丟失重要信息,影響訓練結(jié)果。針對這一問題,本文算法中所使用的YOLOv3-SPP網(wǎng)絡[16]在卷積計算方面對YOLOv3網(wǎng)絡進行了改進。此網(wǎng)絡在保留YOLOv3網(wǎng)絡基本框架的前提下,在每個檢測頭前的第5層和第6層卷積層之間集成了SPP模塊。YOLOv3-SPP網(wǎng)絡通過SPP模塊在同一層內(nèi)獲得多尺度特征,減少了YOLOv3網(wǎng)絡的計算量。而針對因SPP模塊的引入而額外產(chǎn)生的特征通道,本文采取通道剪枝來減少和細化,具體操作將在2.2中介紹。
2.2 剪枝處理
YOLOv3網(wǎng)絡屬于大型卷積神經(jīng)網(wǎng)絡[17],在添加SPP模塊后,如圖3所示,網(wǎng)絡仍較為復雜,每一次迭代計算會產(chǎn)生幾千萬個計算權(quán)重。然而,并不是所有的卷積層通道都會投入訓練過程,所以網(wǎng)絡中存在許多冗余的、對短期預測結(jié)果影響非常小的卷積層通道,導致了計算效率的下降。這些冗余的通道就是導致引言中所述的輸電線路巡檢現(xiàn)場部分問題的重要原因。它們使網(wǎng)絡變得龐大復雜,對硬件性能要求隨之上升,且短期內(nèi)訓練效果極差,故不適合在巡檢現(xiàn)場使用。

圖3 YOLOv3網(wǎng)絡結(jié)構(gòu)Fig.3 YOLOv3 network structure
因此,本文創(chuàng)新性地選擇了一種結(jié)構(gòu)化剪枝的方法,具體操作步驟如下。
首先,對網(wǎng)絡模型進行稀疏訓練,判定被剪通道的重要性。對自批標準化層(Batch Normalization,BN層)[18]中的縮放因子進行L1正則化操作,得到BN層的可訓練尺度比例因子。

(1)
式中:δ為平衡損失函數(shù)中坐標損失函數(shù)系數(shù)(coord)與分類損失函數(shù)系數(shù)(noobj)兩部分的懲罰因子;η為BN層中的可訓練尺度比例因子;Γ為BN層中可訓練尺度比例因子全集;L為損失函數(shù)[19]。
L=Lloc+Lclass+Lconfidence
(2)
式中:Lloc為坐標損失;Lclass為分類損失;Lconfidence為置信度損失。
(3)

(4)

(5)

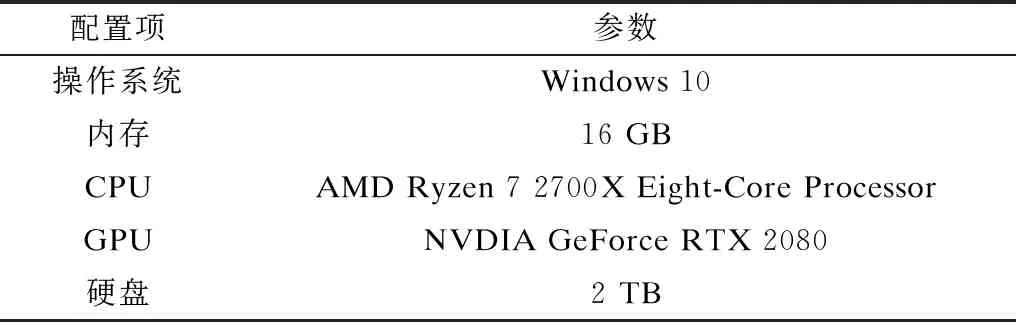
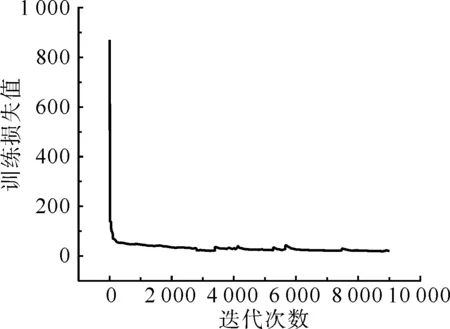
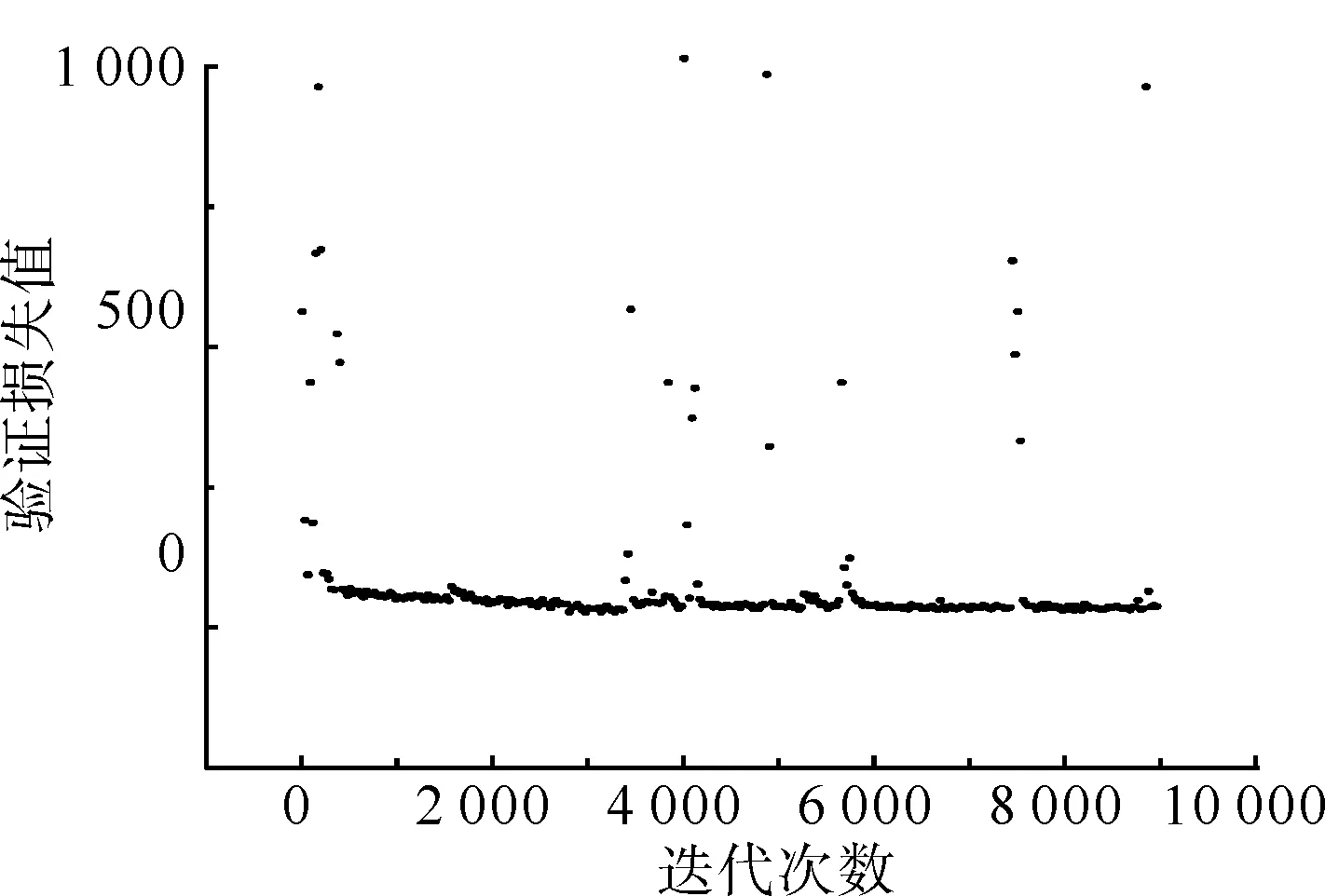
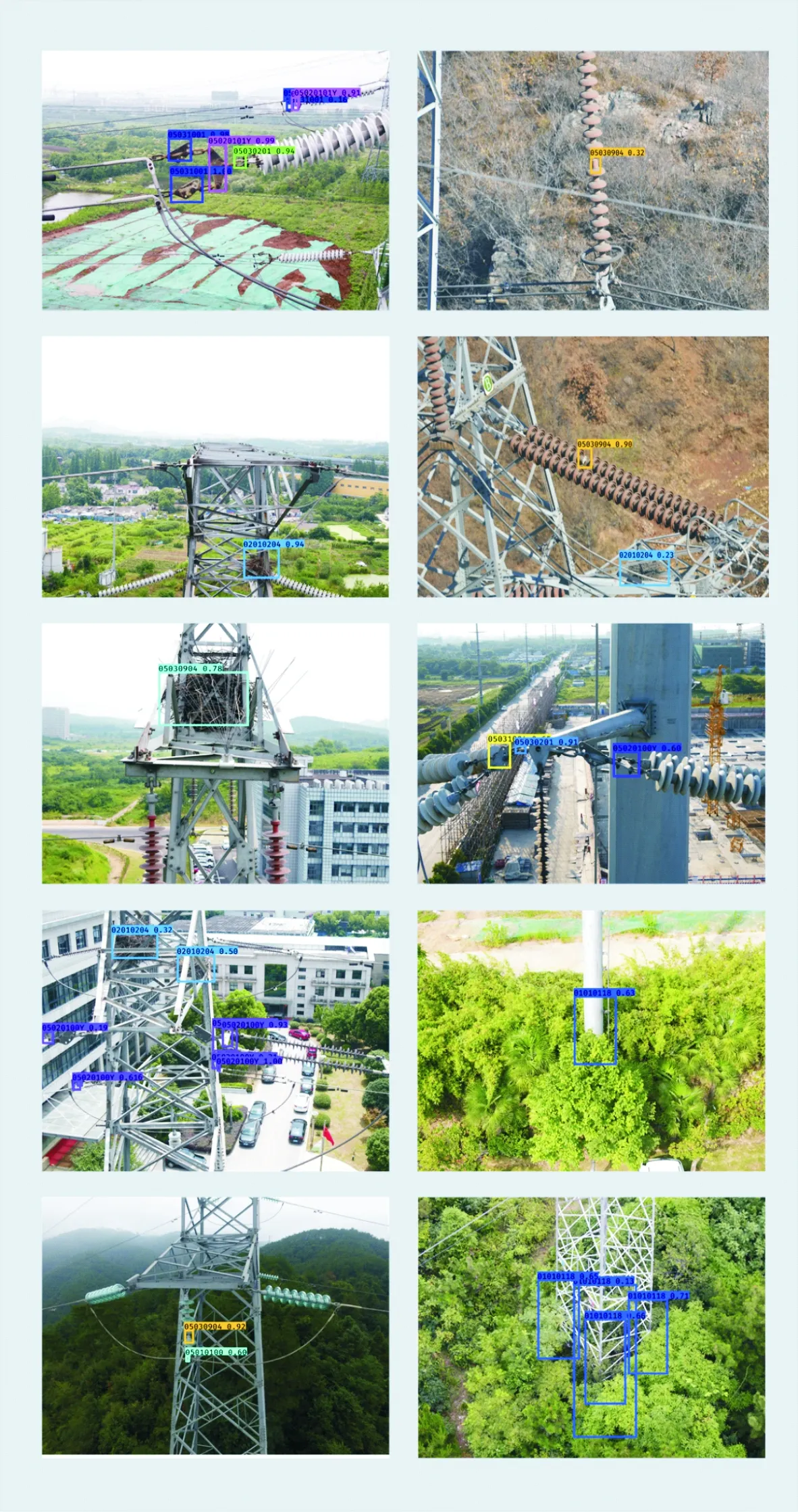
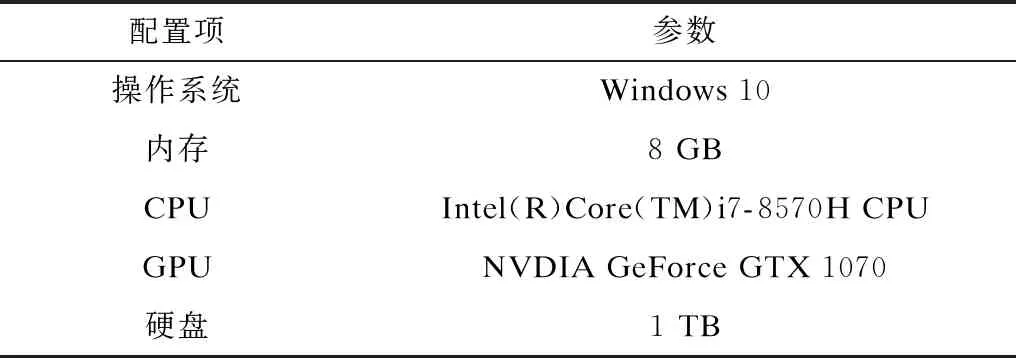
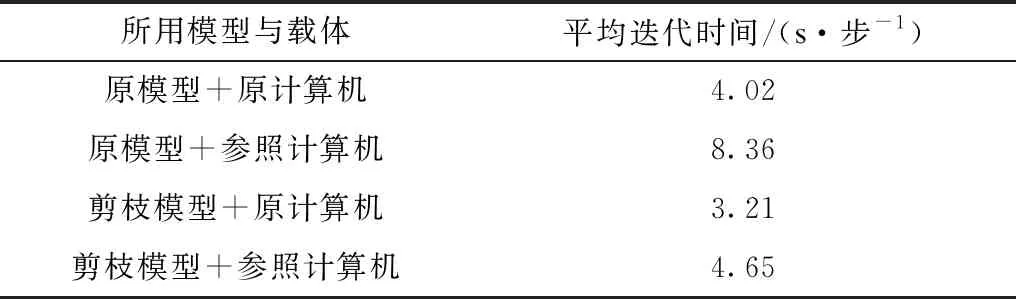
Γ<(x)={η|η∈Γ,η (6) 式中:x為函數(shù)變量;η為BN層中的可訓練尺度比例因子;Г為BN層中可訓練尺度比例因子全集。 (7) 式中:ηth為最佳閾值;ε為一個很小的可忽略的數(shù),本文所有的實驗使用ε=10-3。 其次,根據(jù)式(1)給出的判斷標準,確定被剪枝通道,開始剪枝。根據(jù)式(6)—(7)計算出全局閾值ηth1, 用此閾值控制剪枝過程。在算法中將該閾值設置為剪枝率,一旦通道的可訓練尺度比例因子η的大小低于此閾值,代表此比例因子對應的卷積層通道已經(jīng)剪除。 最后,再根據(jù)式(6)—(7)引入一個局部安全閾值ηth2來判定是否剪枝過度,在算法中將其值設定為特定修剪層中所有值的百分位數(shù),可訓練尺度比例因子η的大小小于該閾值時,停止剪枝,以防止過度迭代剪枝導致模型永久性損毀,并對剪枝模型的參數(shù)進行微調(diào)以確保完全剪枝。 如圖4所示,本文采用了添加SPP模塊并進行了結(jié)構(gòu)化剪枝的YOLOv3模型,對輸電線路進行了缺陷圖像識別。該新模型在進行圖像識別時,圖像識別速度大大提高,能夠更加適應硬件設備等級低、計算預測時間長的輸電線路巡檢現(xiàn)場。 圖4 修改后的創(chuàng)新模型結(jié)構(gòu)Fig.4 Improved new module structure 本文選取的圖片數(shù)據(jù)庫來源于江蘇省南京市某段具備無人機巡檢條件的日常巡檢拍攝圖。 本文選取的數(shù)據(jù)集分為金具、基礎、桿塔及絕緣子4個大類,其中包含32種缺陷類別,例如懸垂線夾銹蝕、U形螺栓銹蝕、防震錘銹蝕、聯(lián)板銹蝕、耐張線夾銹蝕、螺絲凸出或掉落、基礎樹木過于繁茂、鳥巢覆蓋、絕緣子斷裂等。由于需要比對樣本量少且質(zhì)量不一時剪枝模型的優(yōu)化性,實驗僅選取289張圖片作為訓練樣本,其中圖片大小均不同。使用LabelImg軟件對數(shù)據(jù)集進行手工標注,對每種缺陷類別進行特殊編號,例如“絕緣子斷裂”編為“05030904”,從而形成每類缺陷的標注位置坐標,并以XML文件的格式存儲到訓練集數(shù)據(jù)中。 根據(jù)上文所述的可訓練尺度比例因子公式(即式(1))與損失函數(shù)公式(即式(2)—(5))確定應剪枝通道,并根據(jù)最佳閾值公式(即式(6)—(7))選擇最佳剪枝全局閾值ηth1=0.05, 每層中所有通道的局部安全閾值ηth2=0.9, 從而確保至少10%的通道未在同一層中被修剪。 對289張訓練樣本進行訓練,在訓練過程中設定交并比(intersection-over-union,IoU)為0.4,圖像分別率為256×256,一次訓練選取的樣本數(shù)(Batch Size)為10,硬件配置如表1所示。 表1 硬件配置Tab.1 Hardware configuration 訓練過程中記錄訓練損失值以及驗證損失值,并根據(jù)迭代次數(shù)繪制其散點圖。如圖5—6所示,橫軸均表示迭代次數(shù),縱軸分別代表訓練損失值及驗證損失值。 圖5 訓練損失值散點圖Fig.5 Scatter diagram of training loss value 圖6 驗證損失值散點圖Fig.6 Scatter diagram of testing loss value 使用相同的289張圖片組成的數(shù)據(jù)集分別對YOLOv3原模型和本文提出的創(chuàng)新算法模型訓練迭代10 000步,得到的結(jié)果如表2所示,實驗結(jié)果表明,本文所使用的改進后的YOLOv3剪枝模型相比YOLOv3原模型,在平均評價值幾乎不變的情況下,大幅減少了每步所需平均迭代時間。 表2 YOLOv3原模型與改進的剪枝模型效果對比表 Tab.2 Comparison between YOLOv3 original and pruning modules 步驟如下。首先對輸電線路缺陷進行特殊編號,1個編號對應1種缺陷故障,例如“絕緣子斷裂”編為“05030904”。接著,使用新采集的非訓練圖片集中的輸電線路圖片對訓練好的改進YOLOv3模型進行測試,算法輸出如圖7所示,圖片中存在的缺陷,被圖像識別算法框選出來。例如圖7中的第一張檢測圖片中存在“聯(lián)板銹蝕”缺陷,機器自動用方框選出聯(lián)板銹蝕位置,并給出對應的缺陷編號為“05031001”;再如圖中的第8張檢測圖片存在“底部草木覆蓋過密”缺陷,機器自動用方框選出桿塔底部的草木部分,并給出對應的缺陷編號“01010118”,其余檢測圖片均同理,不再贅述。 圖7 算法輸出圖片結(jié)果Fig.7 Detection results of defective electrical equipment 本文使用漏檢率、誤檢率及AP值3項指標進行權(quán)重計算后的結(jié)果作為評價值。具體算法如下。 評價值=(1-漏檢率)×30%+ (1-誤檢率)×20%+KAP×50% (8) 式中:X為漏檢率;Y為誤檢率;KAP為平均精度。 (9) (10) 式中:T為驗證圖片中標注為目標類設備總個數(shù);M1為廠家實際檢測出來且正確的目標類設備總個數(shù);M2為廠家實際檢測出來的目標類設備總個數(shù)。 (11) (12) (13) 式中:計算KAP時選取IoU值為0.5;PT為IoU大于0.5的檢測框數(shù)量;PF為IoU不大于0.5的檢測框數(shù)量;NF為沒有檢測到的地面實況(ground truth)的數(shù)量。 然后,選取另外參照計算機作為訓練載體,硬件配置見表3,其硬件水平不如原計算機。該計算機迭代10 000步的結(jié)果如表4所示。 表3 參照計算機的硬件配置Tab.3 Hardware configuration of reference computer 表4 硬件設備及使用模型對比表Tab.4 Comparison of hardware device 對比表2和表4的數(shù)據(jù)可以清楚看到,當硬件設備相同時,剪枝模型沒有受到圖片量大幅減少的影響,其平均評價值雖略低于原模型(幾乎相同),但其迭代時間平均每步減少0.8 s左右,每進行一次10 000次迭代的訓練可節(jié)約近3 h,這有效地解決了輸電線路巡檢現(xiàn)場算法訓練樣本數(shù)量不足的問題,同時彌補了輸電線路巡檢現(xiàn)場無法對新拍圖片進行即時訓練的缺陷;此外,當?shù)螖?shù)相同時,剪枝模型對硬件設備的依賴性遠小于原模型,剪枝模型的平均迭代時間差比原模型的平均迭代時間差小接近3 s,證明其大大降低了對硬件設備的要求。 本文提出了一種基于SPP模塊的剪枝YOLOv3模型的輸電線路缺陷識別算法。該方法基于傳統(tǒng)YOLOv3框架,卷積層間添加了SPP模塊,并且對YOLOv3框架進行了剪枝處理。最后針對江蘇省南京市某段線路的無人機日常現(xiàn)場巡檢圖片庫進行了訓練及測試,驗證了算法的工程可行性。在目前輸電線路巡檢照片有效樣本數(shù)量有限的實際情況下,仿真結(jié)果驗證了改進的算法在有效訓練樣本數(shù)量不足情況下的可行性。并且,該算法較傳統(tǒng)YOLOv3算法對硬件設備要求不高,一定程度上減輕了圖像識別算法對GPU依賴程度高的情況。然而,對于較小的金具、基礎附近的雜物,此模型的評價值依舊不高。在此方面,可以繼續(xù)改善算法針對此情況的精度,同時將開發(fā)可視化WEB界面,用于訓練、識別、查看和分析結(jié)果。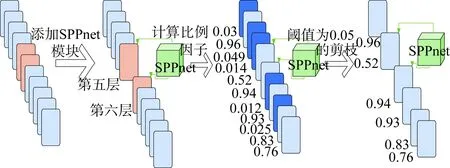
3 實驗與結(jié)果
3.1 數(shù)據(jù)集選取及其標注
3.2 剪枝處理
3.3 訓練模型與測試結(jié)果

4 結(jié)論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
