多無人艇協同避障軟件系統設計*
2021-03-12 11:24:12子文江莊偉濤彭榮發饒銀輝陳遠明洪曉斌
自動化與信息工程 2021年1期
子文江 莊偉濤 彭榮發 饒銀輝 陳遠明 洪曉斌
學術研究
多無人艇協同避障軟件系統設計*
子文江1莊偉濤2彭榮發1饒銀輝2陳遠明1洪曉斌1
(1.華南理工大學機械與汽車工程學院,廣東 廣州 510641 2.廣船國際有限公司,廣東 廣州 511462)
針對多無人艇協同避障軟件系統的需求,首先,提出多無人艇協同避障軟件系統總體框架,并將總體框架劃分為多無人艇層、岸基層和云系統層3個層級;然后,詳細設計岸基層的岸基監控軟件的數據處理與顯示、自主航行路徑規劃模塊;接著,建立Hadoop數據采集2層Flume架構,并基于HBase實現Hadoop數據存儲,基于LSTM實現Hadoop避障預測;最后,驗證該軟件系統可滿足多無人艇協同避障實際需求。
無人艇;協同避障;Hadoop;軟件設計
0 引言
隨著21世紀海上絲綢之路的發展與推進,海上運輸業已成為我國對外貿易和海洋開發的重要一環[1]。海上交通運輸環境日益復雜繁忙以及危險作業項目增多,使得發展海上無人自主航行技術的需求日益迫切[2]。面對多樣化的海洋作業任務和復雜的海洋環境,單無人艇在執行任務時呈現能力不足,難以滿足如今海上任務多樣化的需要。相較于單無人艇,多無人艇系統具有高效的任務完成能力、靈活的機動能力,從而提高了無人艇可執行任務的類型、擴大了無人艇作業半徑及應對復雜海上環境的能力。多無人艇協同技術是多無人艇系統的核心技術之一,對保證多無人艇系統正常運行,提高多無人艇執行任務能力及效率至關重要[3-4]。由于海上交通繁忙且海面情況存在很大的不確定性,多無人艇協同作業時,不僅要考慮外部障礙物的碰撞威脅,還要考慮多無人艇系統內部各無人艇之間的碰撞風險,這對無人艇的自主避障能力提出了更高要求[5-6]。
本文針對多無人艇協同避障軟件系統的需求,提出多無人艇協同避障軟件系統總體框架,并完成多無人艇協同避障軟件系統岸基監控軟件和Hadoop平臺軟件設計。
1 多無人艇協同避障系統總體框架
多無人艇協同避障系統由多無人艇層、岸基平臺層和云系統層3層結構組成,總體框架如圖1所示。
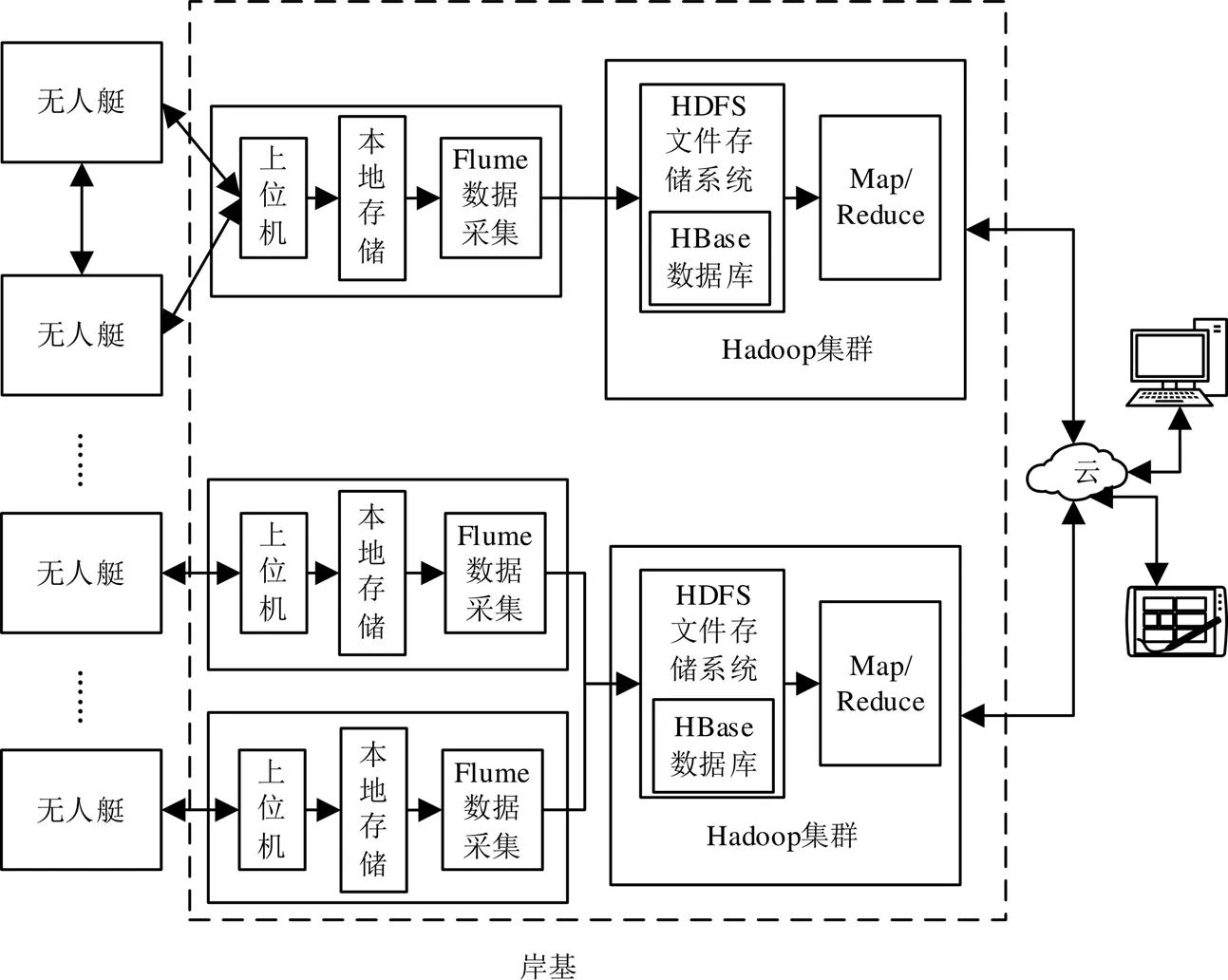
圖1 多無人艇協同避障系統總體框架
無人艇搭載傳感設備和通信設備,具有環境信息感知能力、與岸基及其他無人艇通信能力,處于3層結構的前端,是多無人艇協同避障任務的具體執行者。多無人艇協同避障的相互局部決策過程在無人艇層進行,各無人艇獨立進行計算和局部決策。
岸基層主要由上位機和Hadoop平臺組成,其中岸基上位機用于提供多無人艇協同避障過程的可視化顯示及數據的本地存儲,并通過Flume將數據上傳至Hadoop集群;Hadoop平臺通過HDFS文件存儲系統和Map/Reduce框架實現大量數據的存儲和避障預測等運算,為多無人艇協同避障提供數據存儲和算力保障[7-8]。
云系統層為系統提供了良好的可擴展性,可支持無人艇終端的接入,滿足未來較多無人艇數據持久化存儲和高效分析的需求;實現用戶遠程接入云端系統實時查看無人艇運行狀態等功能;同時為后期復雜環境下避障模型在線更新等更多功能的引入預留空間。
2 岸基監控軟件設計
2.1 數據處理與顯示模塊設計
本文采用串口通信實現岸基無線數傳電臺與無人艇岸基監控軟件之間的通信[9]。無人艇岸基監控軟件讀取串口數據后,需先對無人艇數據進行分割處理,然后在主界面分類顯示。無人艇的數據解析及可視化顯示流程如圖2所示。
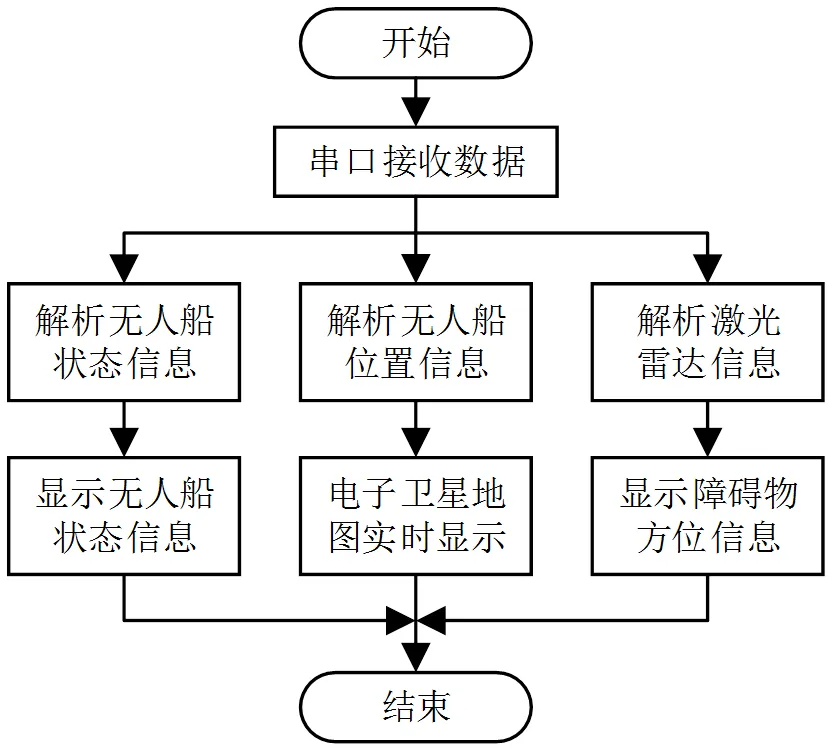
圖2 數據解析及可視化顯示流程圖
目前能較準確采集到的實時數據有:1)位置信息,包括經度、緯度;2)姿態信息,包括俯仰角、偏航角、翻滾角;3)轉向信息,主要是轉舵角;4)運動信息,主要是航速;5)障礙物信息,包括無人艇與障礙物之間的距離和方位。以上數據在主頁面進行顯示,如圖3所示。主頁面嵌入了電子衛星圖,用于無人艇航線規劃結果的顯示、實時標注無人艇位置和顯示無人艇航行軌跡。除顯示上述無人艇數據外,主頁面還增加了無人艇航行模式選擇、轉彎角度、航行速度等參數的設置功能模塊,用于無人艇的遠程操控以及調試,并可方便對比查看預設狀態與無人艇實際運動狀態。
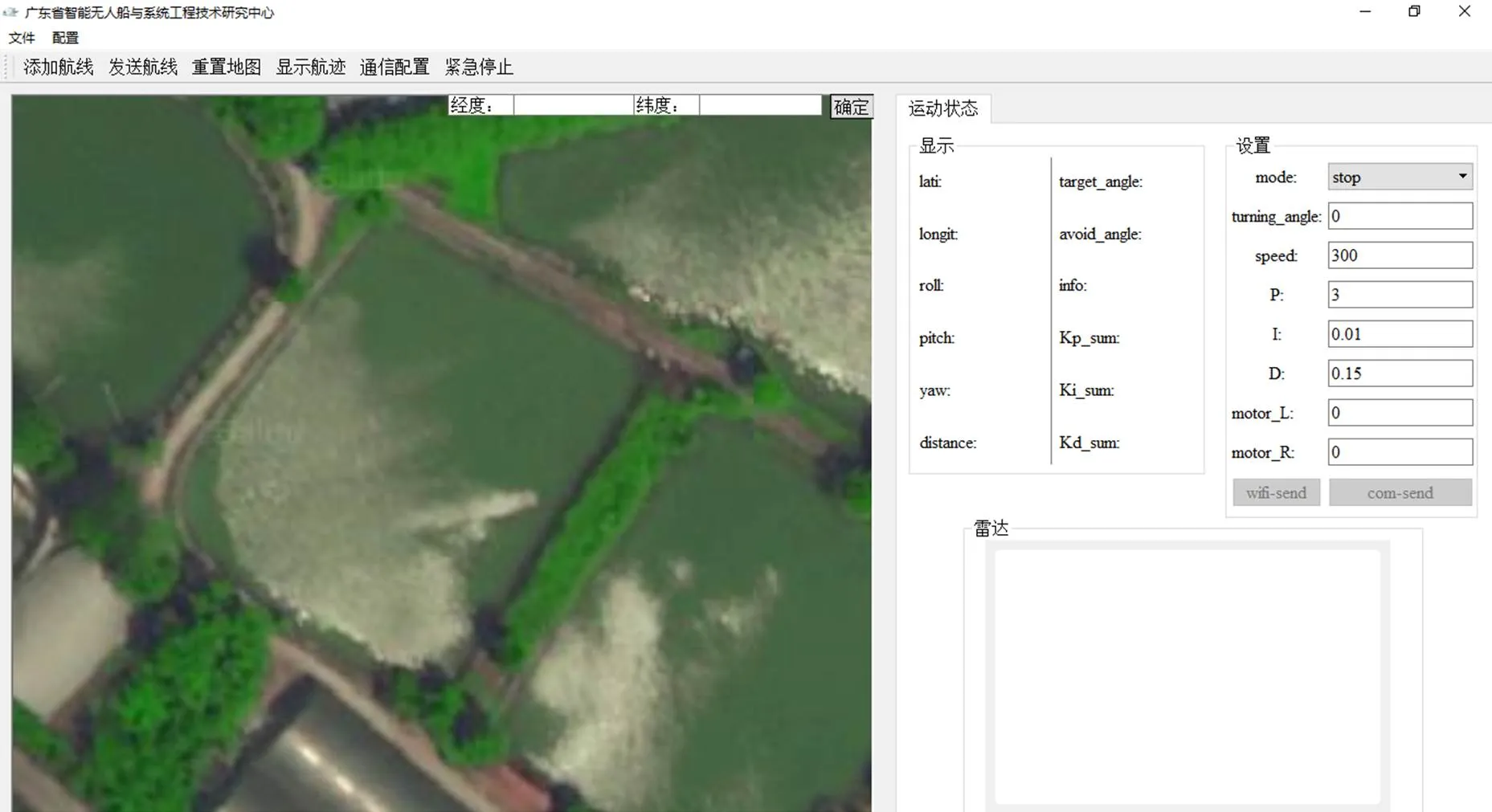
圖3 無人艇岸基監控軟件主頁面
2.2 自主航行路徑規劃模塊設計
自主航行路徑規劃模塊的功能是對無人艇的全局路徑進行規劃,得出一條能夠有效避開全局環境中已知障礙物的平滑路徑,提高無人艇的任務執行效率。本文設計的多無人艇系統,路徑規劃是針對無人艇集群的平均位置而言,即規劃路徑是無人艇集群平均位置所形成軌跡的期望路徑。根據航行環境及任務需求的不同,本文分別采用蟻群路徑規劃算法和改進RRT路徑規劃算法對多無人艇系統的協同航行路徑進行規劃[10-11]。其中,蟻群路徑規劃算法主要用于處理簡單海面情況和面向單個目標點的多無人艇系統路徑規劃問題;改進RRT路徑規劃算法主要用于處理復雜海洋環境和面向多途經點任務需求的多無人艇系統路徑規劃問題。無人艇自主航行路徑規劃模塊程序執行流程如圖4所示。

圖4 無人艇自主航行路徑規劃模塊程序執行流程
首先,輸入所需規劃的航行路徑的起點和終點或途經點;然后,程序將根據輸入目標點的個數自動調用內置的蟻群或RRT無人艇路徑規劃算法,計算出一條優化的可行航行路徑;最后,將規劃的航行路徑序列點發送到各無人艇,同時將該規劃路徑在圖3中衛星圖上予以直觀顯示。
3 Hadoop平臺軟件設計
3.1 Hadoop平臺數據采集模塊設計
基于Hadoop平臺適配的數據采集器Flume實現數據采集模塊,用于采集無人艇航行過程中產生的大量傳感信息以及狀態數據,并將這些數據上傳到HDFS系統進行存儲。多無人艇協同避障系統Hadoop平臺數據采集模塊由2層Flume構成,如圖5所示。
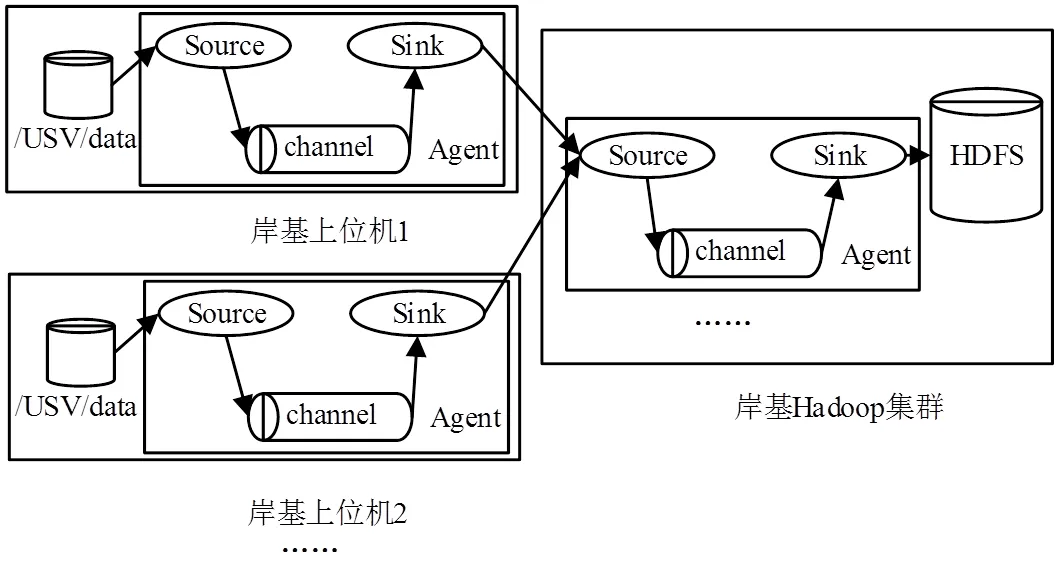
圖5 Hadoop平臺數據采集兩層Flume架構
Hadoop平臺數據采集模塊第一層為數據采集層,部署于岸基上位機,負責監控本地無人艇數據存儲目錄并將數據實時上傳至Hadoop平臺。當有多個岸基上位機存在時,每個上位機都需要部署Flume系統。
第二層為數據匯聚層,部署于岸基Hadoop集群,負責將各個上位機上傳的無人艇數據進行匯聚并將其寫入Hadoop集群的HDFS分布式文件系統。
由于多無人艇協同避障系統只涉及1個Hadoop集群,因此,Hadoop平臺的Flume系統只需部署1次,但其Agent的數目可以根據需要配置。根據實際需求,岸基上位機端的Source類型需設置為Spooling Directory Source,用于監控本地無人艇數據存儲目錄;Hadoop端的Sink類型需設置為HDFS Sink,用于將無人艇數據寫入HDFS分布式文件存儲系統。
3.2 Hadoop平臺數據存儲模塊設計
HBase是Hadoop平臺的標準數據庫,其為Hadoop平臺提供了良好的非關系型數據存儲能力,可有效存儲無人艇航行過程中產生的大量多源異構傳感數據。HBase數據庫的加載方式包括以HBase自帶的API完成數據導入操作、借助Map/Reduce實現數據導入2類方式。考慮到基于Map/Reduce編寫自定義數據加載方法較為復雜,且其運行過程花費的時間成本較高;同時多無人艇系統具有數據量較大的特點,本文選擇以HBase自帶的ImportTSV命令直接將無人艇CSV數據文件導入HBase數據庫。HBase數據庫的無人艇數據表設計,主要包括無人艇數據表行鍵(Rowkey)和列族(column family, CF)的設計,數據表結構如表1所示。
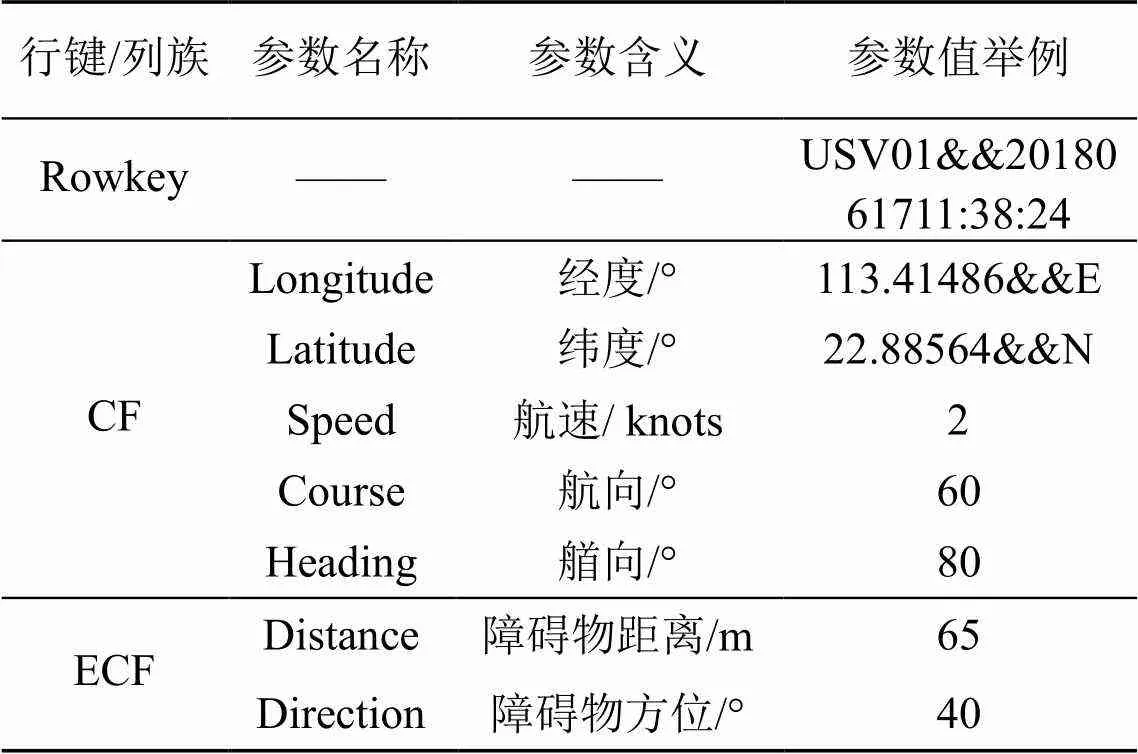
表1 HBase無人艇數據表結構
本文以無人艇ID+16位數據產生時間為行鍵,其中無人艇ID為自定義的無人艇編號;16位數據產生時間為無人艇主控制器實時讀取到的艇載GNSS接收機接收到的衛星定位信息中的時刻,該時間可精確到毫秒級。考慮到岸基與多條無人艇進行實時通信的壓力,目前岸基與無人艇的數據收發周期維持在秒級,故行鍵所用時間也只取到秒。基本列族用于存儲無人艇傳感信息數據,目前主要存儲反映無人艇運動狀態如無人艇位置經緯度、航速、航向、艏向等基本信息。此外,本文還設計了一個擴展列族(extended column family, ECF)用來存儲無人艇感知到的障礙物信息,主要是障礙物相對于無人艇的距離和方位。隨著實際需求的變化,可以擴展添加更多列族。在岸基上位機監控軟件可對存儲于Hadoop平臺HBase數據庫的無人艇航行歷史數據進行查看,查詢界面如圖6所示。
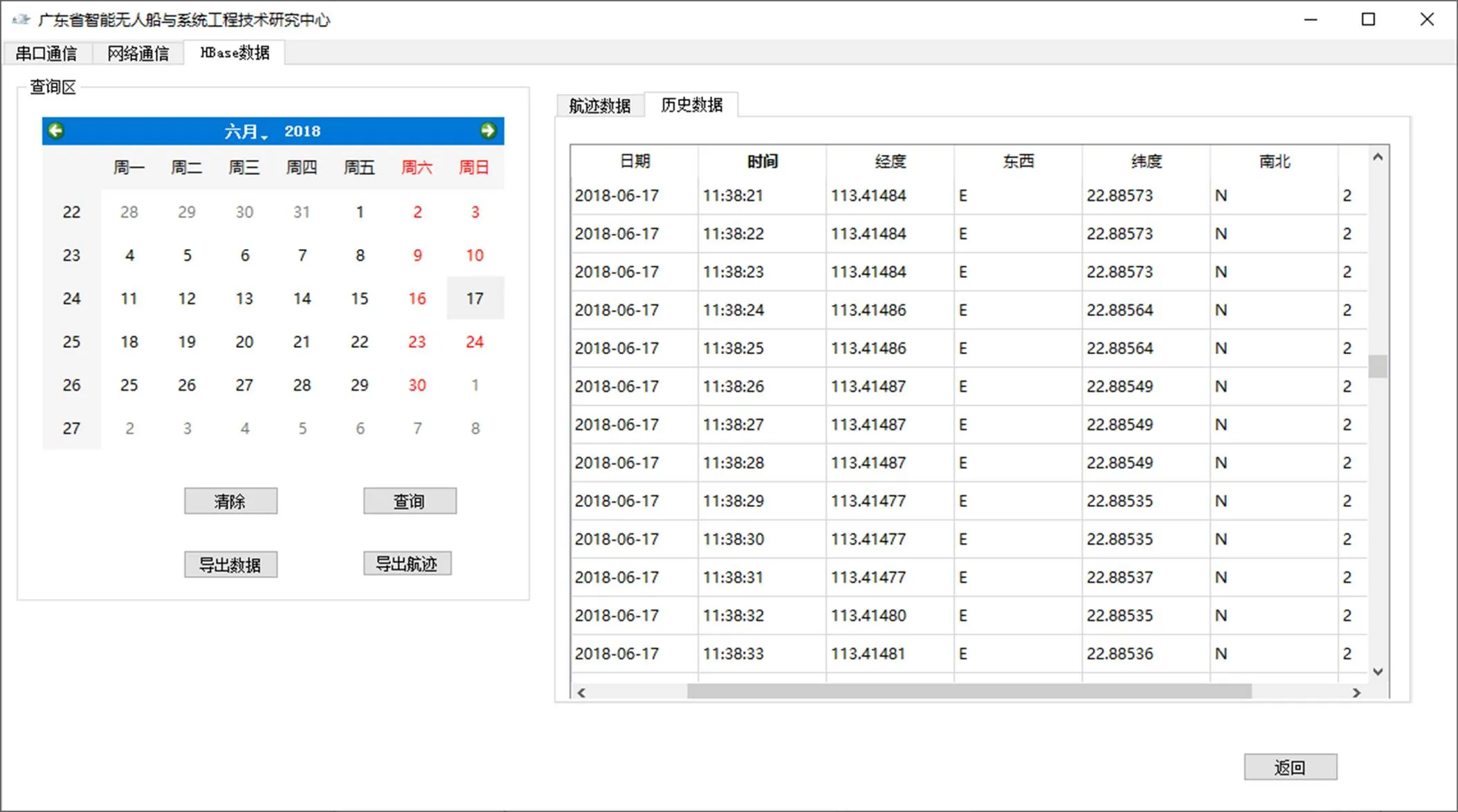
圖6 HBase數據上位機查詢界面
3.3 Hadoop平臺避障預測模塊設計
本文選擇專門為Hadoop平臺開發的開源分布式深度學習框架Deeplearning4j作為開發框架,設計一個基于時間窗口的LSTM神經網絡模型用于預測動態障礙物的航行軌跡,網絡結構模型如圖7所示。
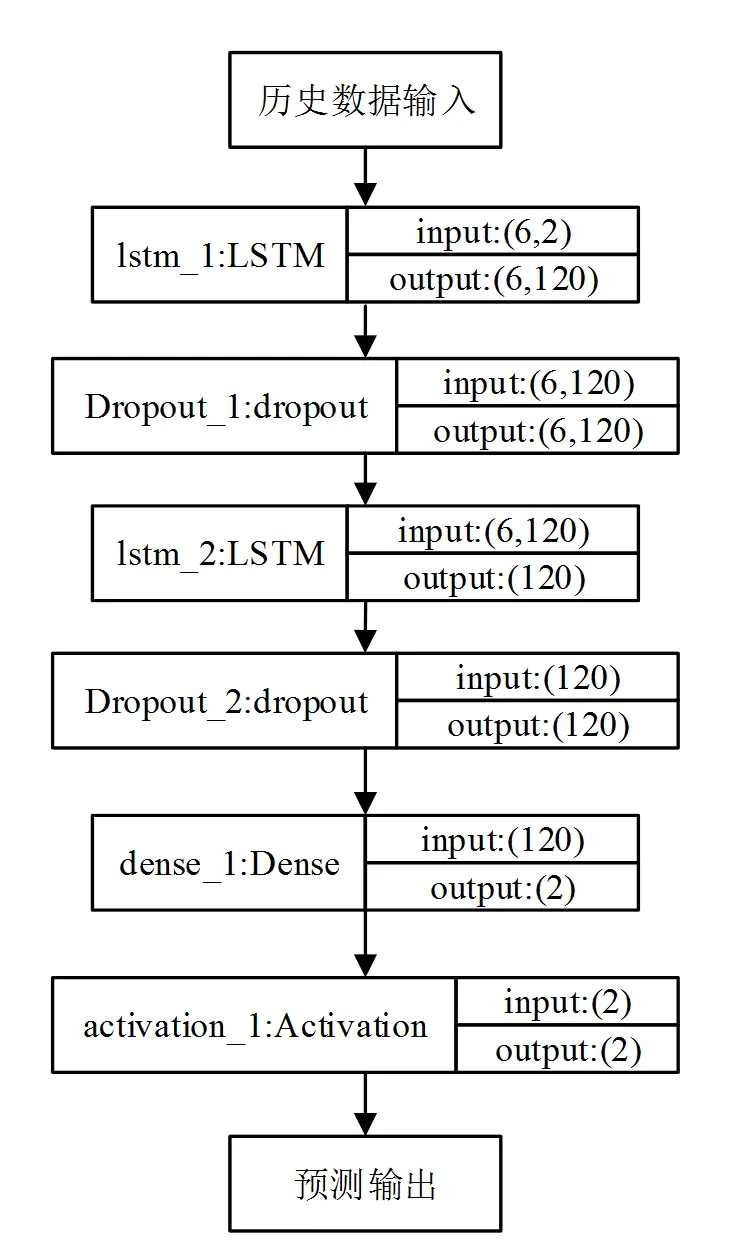
圖7 LSTM網絡模型結構圖
在該模型中,時間窗口為6個采樣周期時間,即無人艇軌跡在時間上依次相鄰的6個位置的經緯度作為輸入值,以下一個位置的經緯度作為目標值。第一個隱含層lstm_1和第三個隱含層lstm_2為包含120個單元的LSTM網絡;第二個隱含層Dropout_1和第四個隱含層Dropout_2作用是隨機失效部分神經元以防止出現過擬合,其Dropout率設置為0.3;dense_1為一個全連接層,作用是對數據進行降維操作以符合目標值維度;輸出層的激活函數設置為ReLU函數,模型采用Adam優化器,均方誤差作為損失函數。
選擇無人艇某次歷史航行數據對本文設計的基于時間窗口的LSTM網絡障礙物軌跡預測方法進行驗證,該無人艇在衛星地圖上的航行軌跡如圖8所示。將該無人艇航行軌跡數據集劃分為訓練集和測試集,劃分情況示意圖如圖9所示。該段航跡共有45個點,選取第33~38個點作為測試集的輸入值,第39個點作為測試集的目標值,其余數據作為訓練集。測試結果如圖10所示。LSTM網絡模型預測的位置經緯度為(113.41480°E, 22.88535°N),無人艇的實際位置坐標為(113.41480°E, 22.88534°N),預測均方誤差為1.0637e-10,預測距離誤差為0.7 m。

圖8 無人艇航行軌跡圖
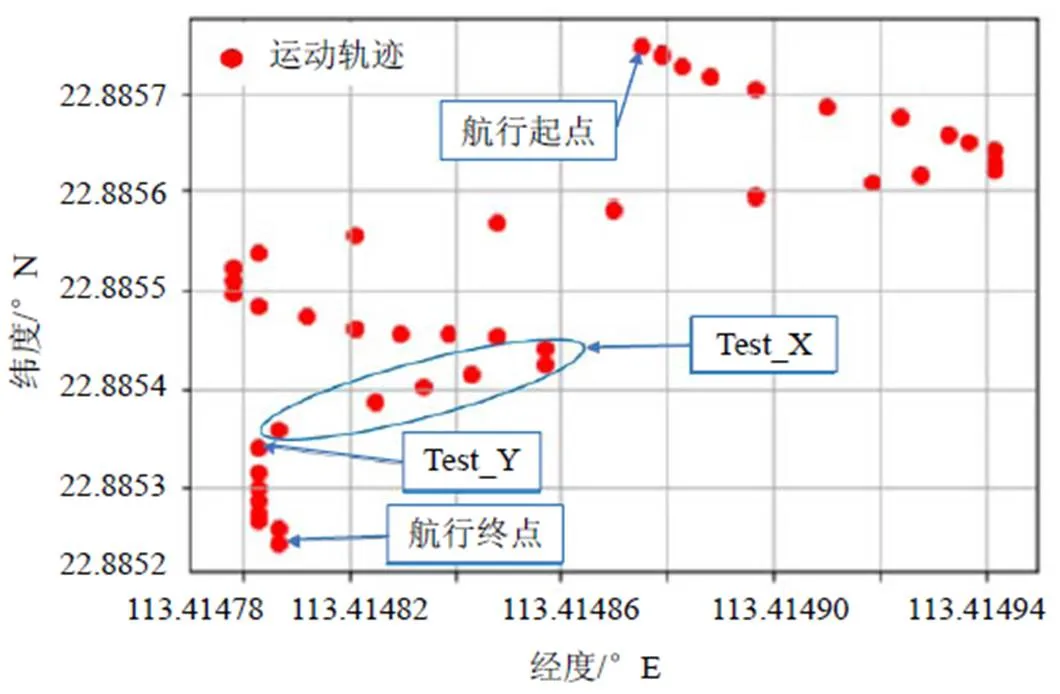
圖9 無人艇航行軌跡數據集劃分示意圖
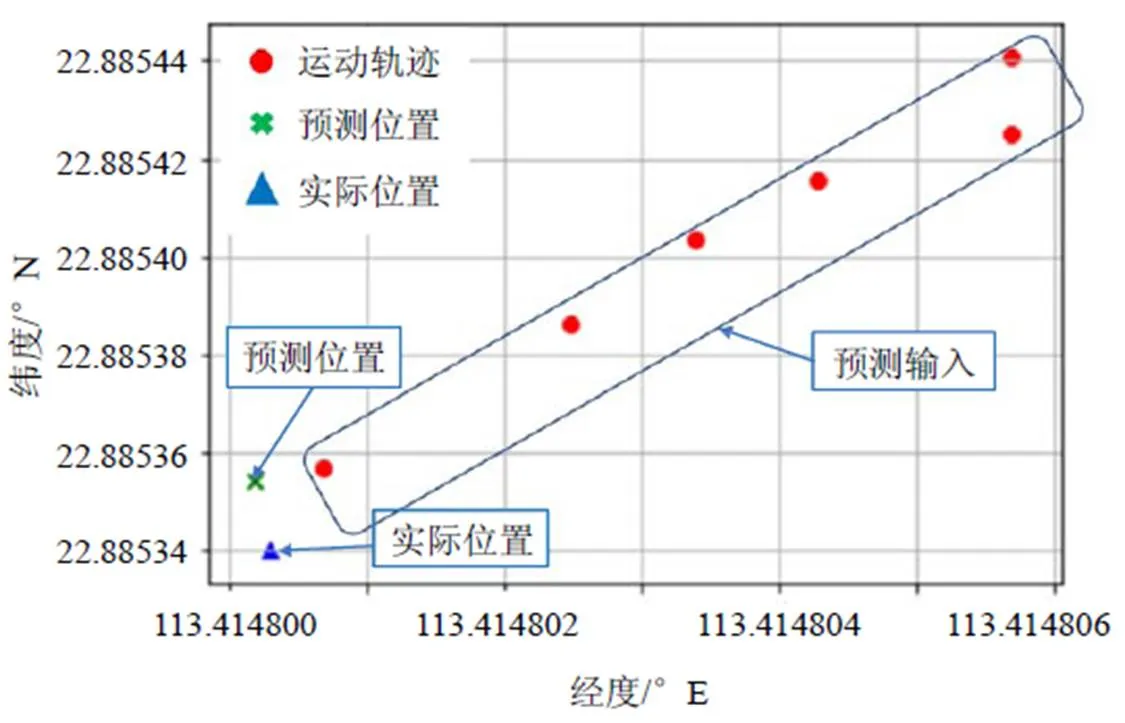
圖10 測試結果
4 結語
針對多無人艇協同避障系統的軟件需求,結合多無人艇協同避障系統總體框架,開發多無人艇協同避障軟件系統。多無人艇協同避障系統的岸基軟件為基礎部分,可分為無人艇岸基監控軟件和Hadoop平臺軟件2大部分,其中,無人艇岸基監控軟件主要包括通信模塊、數據處理與顯示模塊和自主航行路徑規劃模塊;Hadoop平臺軟件主要包括Hadoop平臺數據采集模塊、Hadoop平臺數據存儲模塊、Hadoop平臺避障預測模塊。本文開發的岸基軟件系統為多無人艇協同避障系統后續開發工作奠定基礎,未來將進一步開展多無人艇協同避障軟件系統云系統層軟件開發工作。
[1] 李振福,段偉,李肇坤,等.基于“21世紀海上絲綢之路”AIS數據的船舶交通流預測[J].廣東工業大學學報,2020,37(6): 1-8.
[2] 李奕雯.無人船技術為“智慧海洋”插上翅膀[J].海洋與漁業,2019(6):94-97.
[3] 王飚,李博,高敏,等.無人船的協同控制策略綜述[J].中國水運(下半月),2019,19(2):3-5.
[4] RIGATOS G, BUSAWON K. Unmanned Surface Vessels[M]. Robotic Manipulators and Vehicles. Springer, Cham, 2018: 501-591.
[5] 洪曉斌,魏新勇,黃燁笙,等.融合圖像識別和VFH+的無人艇局部路徑規劃方法[J].華南理工大學學報(自然科學版), 2019,47(10):24-33.
[6] WANG N, GAO Y, WENG Y, et al. Implementation of an integrated navigation, guidance and control system for an unmanned surface vehicle[C]//Advanced Computational Intelligence (ICACI), 2018 Tenth International Conference on. IEEE, 2018: 717-722.
[7] 洪曉斌,子文江,余蓉,等.大型鋼結構無損云檢測的可信度融合評估[J].華南理工大學學報(自然科學版),2019,47 (3):70-77.
[8] 陳陽.基于Hadoop平臺的FCM算法并行化設計[J].自動化與信息工程,2019,40(1):39-43.
[9] 黃燁笙,徐鄭攀,陳遠明,等.無人艇自主靠泊控制系統設計[J].中國測試,2020,46(10):111-117.
[10] 洪曉斌,子文江.一種基于蟻群算法的無人船航行路徑自主規劃方法: CN107816999A[P].2018-03-20.
[11] CHEN X, LIU Y, HONG X, et al. Unmanned Ship Path Planning Based on RRT[C]//International Conference on Intelligent Computing. Springer, Cham, 2018: 102-110.
Software System Design of Multi-USV Cooperative Obstacle Avoidance
Zi Wenjiang1Zhuang Weitao2Peng Rongfa1Rao Yinhui2Chen Yuanming1Hong Xiaobin1
(1.School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China 2.Guangzhou Shipyard International Company Limited, Guangzhou 511462, China)
According to the requirements of multi-USV cooperative obstacle avoidance software system, firstly, the overall framework of multi-USV cooperative obstacle avoidance software system is proposed, and the overall framework is divided into three levels: multi-USV layer, shore-based layer and cloud system layer; secondly, the data processing and display module, autonomous navigation path planning module of shore-based monitoring software of shore-based layer are designed in detail; then the two-layer Flume architecture for Hadoop data acquisition is established, and Hadoop data storage is realized based on HBase, and Hadoop obstacle avoidance prediction is realized based on LSTM; the developed software system can meet the actual needs of multi-USV cooperative obstacle avoidance.
unmanned surface vehicle; cooperative obstacle avoidance; Hadoop; software design
U664.82
A
1674-2605(2021)01-0003-06
10.3969/j.issn.1674-2605.2021.01.003
廣東省科技計劃項目(2019B151502057、2018A030313209);廣東省自然資源廳科技項目(GDoE[2019]A13);廣州市科技計劃項目(201902010024)。
子文江,男,1995年生,碩士研究生,主要研究方向:多無人系統協同技術。E-mail: django_tzu@qq.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
公民與法治(2020年11期)2020-07-25 02:02:06
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
