雷達!雷達!自動駕駛的鷹之眼
2021-03-12 03:39:50
微型計算機·Geek 2021年2期


最近的資本市場,新能源概念是出盡風頭。互聯(lián)網(wǎng)上也十分熱鬧,馬斯克、何小鵬兩位創(chuàng)始人在社交平臺上隔空交火,陰陽怪氣的對話看得吃瓜群眾那才叫一個爽啊。事情源于去年廣州車展上,小鵬汽車發(fā)布了一款“鵬翼版”全新P7,CEO何小鵬透露明年將推出全球首款搭載激光雷達的量產(chǎn)智能汽車。當晚馬斯克就在Twitter上嘲諷小鵬汽車軟件模仿特斯拉,隨后何小鵬則在微博強硬回懟,聲稱要將特斯拉打得找不著東。
聯(lián)想到去年馬斯克還吐槽“激光雷達就像人身上長了一堆闌尾,闌尾本身的存在基本是無意義的”,“任何依賴激光雷達的公司都可能無疾而終”。按理說,激光雷達已經(jīng)不在馬斯克的視野范圍內(nèi)了,為何卻在這個時候因為激光雷達而親自上陣懟小鵬汽車呢?
有趣的是,在汽車圈子之外的華為也開始密集釋放關于量產(chǎn)車規(guī)級激光雷達的消息。在今年廣州車展期間,華為智能汽車解決方案BU總裁王軍接受媒體采訪時表示,華為的激光雷達已經(jīng)成為車企搶購的爆品,并考慮在近期做一個激光雷達產(chǎn)品的整體發(fā)布。為何馬斯克要因為激光雷達打口水仗,為何巨頭們紛紛盯著激光雷達?這都要從汽車的智能駕駛說起。
要理解這個問題,首先要明白智能駕駛怎么實現(xiàn)的。在《速度與激情8》中,大反派查理茲·塞隆為了搶奪核武器發(fā)射裝置,用高科技黑入汽車智能駕駛系統(tǒng),使得上千輛無人汽車組成了一支龐大的“僵尸車”軍團,在街頭攔截俄國國防部長的專車,汽車巨浪在街頭洶涌前進,畫面震撼。那智能駕駛究竟怎樣實現(xiàn)的呢?簡單地說,就是給常規(guī)車加上智能駕駛模塊,再連上通信網(wǎng)絡。這個模塊主要有三大核心功能:環(huán)境感知——計算決策——控制執(zhí)行,分別對應于人的“眼睛——大腦——神經(jīng)”。
它們的功能執(zhí)行邏輯也很簡單,非常像人類:走在路上,首先眼睛發(fā)現(xiàn)對面走來了一個人,然后大腦去決策怎么躲避這個人,最后是神經(jīng)驅(qū)動肢體去繞開這個人。智能汽車的眼睛主要是由攝像頭、激光雷達、高精度地圖、GPS定位等構成,主要負責收集車身周邊信息,確定車輛的位置。智能汽車的大腦是在收到了眼睛傳來的數(shù)據(jù)信息后,通過計算芯片+感知算法,去識別交通狀況,然后分析計算出最優(yōu)的路線。
智能汽車的神經(jīng)是基于大腦給出的決策結(jié)果,對制動系統(tǒng)、轉(zhuǎn)向系統(tǒng)、電機系統(tǒng)等下達指令,控制車輛運行狀態(tài),執(zhí)行駕駛路線。而馬斯克和何小鵬的爭論點在于:應該主要用什么來當眼睛,激光雷達還是攝像頭?
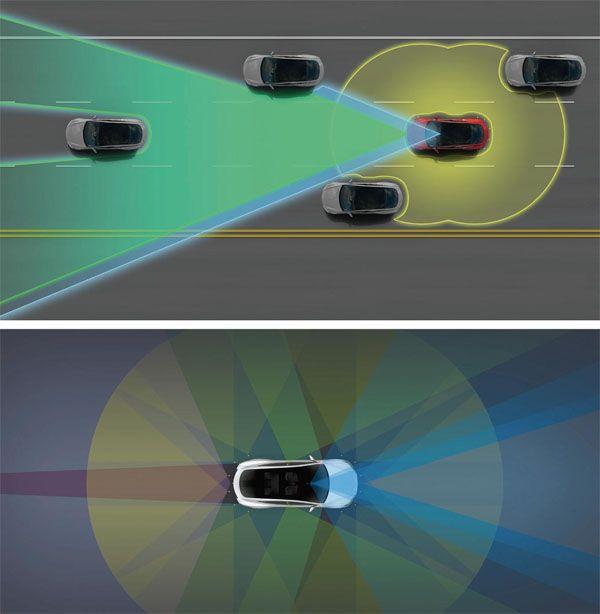
智能汽車眼睛誰來當呢?視覺方案模仿的是人眼,主要是靠“看”,相當于一個二維照相機。雷達方案模仿的是蝙蝠,是立體的“掃”,相當于一個三維照相機。視覺方案的好處在于,已經(jīng)相對成熟。以攝像頭主導、配合毫米波雷達等低成本元件,構成純視覺計算,可以滿足當前L2級自動駕駛的需求,典型代表就是特斯拉。
但攝像頭拍下來的畢竟是二維圖像,相比三維信息更難挖掘,需要更強大的算法、大量數(shù)據(jù)的訓練和更長期的研發(fā)投入,并且會存在精度、穩(wěn)定性和視野等方面的缺陷,暫時無法滿足L3級以上的自動駕駛要求。
雷達方案可以創(chuàng)建出清晰的3D圖像,通常看得更遠,看得更清晰,抗干擾能力也更強,可以滿足L3級以上的自動駕駛要求,但成本也更高。通常以激光雷達主導,配合攝像頭、毫米波雷達等元件,典型代表為谷歌Waymo、國內(nèi)的百度Apollo。
激光雷達的原理簡單來講就是激光雷達的發(fā)射器發(fā)射出一束激光,激光光束遇到物體后,經(jīng)過漫反射返回至激光接收器,雷達模塊根據(jù)發(fā)送和接收信號的時間間隔乘以光速,再除以二,即可計算出發(fā)射器與物體的距離。同時,反饋回來的輪廓信息組成所謂的“點云”并繪制出三維環(huán)境地圖,精度可達到厘米級。
根據(jù)結(jié)構,激光雷達分為機械式、固態(tài)式和混合固態(tài)式三種,可以說是傳統(tǒng)版、高配版和市場版三種路線。
機械式激光雷達當前技術最為成熟,它主要分為1線,4線,8線,16線,32線,64線,128線等,線數(shù)越大,激光雷達的性能就越高。傳統(tǒng)的機械激光雷達結(jié)構復雜,體積大,成本高,想實現(xiàn)大規(guī)模量產(chǎn)變得十分困難。此外,這種雷達里面機械部件太多,調(diào)試裝配復雜,生產(chǎn)周期長,并且機械部件在真實路況下比較容易損壞,難以符合車規(guī)的要求。
固態(tài)式激光雷達屬于“高富帥”版,目前固態(tài)雷達從技術方案的角度上可以分為MEMS微機電、OPA和FLASH三種。MEMS激光雷達也就是常說的混合固態(tài)激光雷達,因為其內(nèi)部僅需一束激光光源,用“可動”的微鏡面來反射光線,因此這張激光雷達兼具“固態(tài)”和“運動”兩種屬性,故得名混合固態(tài)。其優(yōu)點在于體積小,成本低,但可靠性仍有待驗證。
OPA系統(tǒng)則使用一個光學相位調(diào)制器用來控制通過透鏡的激光的速度,從而控制光的波面形狀,以此來消除機械運動部件。采用OPA技術的代表廠商為美國的Quanergy,其最新的OPA激光雷達產(chǎn)品為S3-2。
Flash激光雷達的原理非常接近于使用Flash的數(shù)碼相機,通過同時照亮一大片區(qū)域,在焦平面陣列(FPA)上獲取所產(chǎn)生的像素距離訊息。其優(yōu)點在于采集率很快且免疫振動因素,但缺點是難以避免環(huán)境中其他反射鏡的影響,而且照亮整個探測場景和遠處物體需要很高的激光功率。Flash激光雷達中最為知名的是比利時廠商Xenomatix,其下Xenolidar系列是無須經(jīng)過掃描的激光雷達,只需“一次閃光”就能檢測整個場景,但又不會受到短距離和高功率的限制。
隨著未來自動駕駛技術的進一步普及,激光雷達市場規(guī)模將會進一步擴大。咨詢機構Yole預計,2025年全球激光雷達出貨量約470萬個,銷售額約61.9億美元。激光雷達看起來這么美,為何各家車企卻并不見得對此有多狂熱呢?說白了,現(xiàn)在車上裝激光雷達,賬還是有點算不過來。
馬斯克曾說“激光雷達,免費他都不用”,他想從算法上解決視覺信息的處理問題。他的理由也很簡單,馬斯克認為車和道路都是為人類設計的,人的視覺加大腦處理信息的模式可以安全行駛,那么自動駕駛也可以做到。雷達是人都不具有的感官,為什么要裝,這不是正常人拄拐杖,多此一舉嗎?
但更可能讓馬斯克看不上的原因是當前激光雷達成本高昂,是視覺解決方案的十倍以上。以Velodyne的激光雷達為例,16線束的激光雷達需要約4000美元,64線束的更是高達8萬美元,相比之下,攝像頭自動駕駛的硬件成本才幾百美元。一個激光雷達價格頂?shù)蒙蟽奢vModel 3,這種燒錢東西,馬斯克自然不感冒。
小鵬則在考慮打安全牌來和特斯拉競爭。小鵬聲稱之后要采用攝像頭+毫米波雷達+超聲波雷達+激光雷達的融合方式來搞自動駕駛,簡單來說就是加滿裝備跑得更快更穩(wěn)更安全。可即使激光雷達能滿足L3以上級別的自動駕駛要求,高昂的成本,小鵬汽車又該如何應對呢?
小鵬自己的答案是其一直在培養(yǎng)自己的供應商,通過提升訂單量可以大幅降低制造成本,也可以增強自己的議價能力。但除了這個答案之外,顯然華為的入局是一個不可忽視的外部變量。就在小鵬和特斯拉互懟之際,華為也透露在研究激光雷達,目標是短期內(nèi)開發(fā)出100線的產(chǎn)品,并在未來將成本降至200美元,甚至100美元。華為輪值董事長徐直軍還聲稱,“特斯拉現(xiàn)在能做到的事情,我們都能做到”,正在將華為的兵團作戰(zhàn)應用于激光雷達。
按正常的思維來看,小鵬直接挑戰(zhàn)低價激光雷達可能有點懸,但華為的入局讓這場爭論出現(xiàn)變局。此外,今年8月大疆宣布可以量產(chǎn)千元級別車用激光雷達,適用于L3、L4級別自動駕駛。Horizon和Tele-15的價格分別只要6499和9000元,相比于Velodyne的幾萬、幾十萬元已經(jīng)非常便宜了。此外,禾賽光電、速騰聚創(chuàng)等都是國內(nèi)比較好的激光雷達供應商。如果未來一兩年激光雷達價格大幅下降,“免費也不用”的特斯拉仍然繼續(xù)堅持自己的視覺方案,可能真夠馬斯克喝一壺的。
不管是華為還是其他廠商,要參與這場競爭,大致都會分三步走。第一步,以高產(chǎn)品性能的機械旋轉(zhuǎn)激光雷達,入手無人駕駛市場。該市場客戶多為頭部科技公司,對成本敏感度低、性能要求高,可根據(jù)客戶反饋和技術迭代,加深對系統(tǒng)理解,積累開發(fā)經(jīng)驗,形成技術護城河,同時實現(xiàn)較高毛利率的銷售收入、占領市場份額、積累品牌口碑。第二步,根據(jù)產(chǎn)品累計的需求,自研芯片,增加產(chǎn)品集成度和降低成本,進軍客戶分散、性能要求低、成本敏感度高的服務機器人市場,以及開發(fā)周期漫長、對集成度、可靠性、成本、規(guī)模化生產(chǎn)要求嚴苛的ADAS乘用車市場。第三步,研發(fā)感知算法、即時定位與高精地圖構建、感知數(shù)據(jù)管理平臺,進軍車聯(lián)網(wǎng)市場。
當然激光雷達也不是完美的,應用中也存在著不足。比如大霧和大雨會減弱激光信號的強度,精度會下降,并且現(xiàn)在的激光雷達的點云是基于幾何呈現(xiàn)的,雖然能分辨出形狀,但卻不能辨別顏色和紋理等,這意味著激光雷達還無法區(qū)分紙袋和石頭的不同。激光雷達配合其他傳感器的整體方案可能才是應用方向。
在智能駕駛產(chǎn)業(yè)鏈的三個層面中,環(huán)境感知主要對應的是攝像頭、雷達(包括超聲波、毫米波、激光雷達);計算決策主要對應的是計算芯片、感知算法、高精地圖、通信技術等方面:而控制執(zhí)行則是制動系統(tǒng)、轉(zhuǎn)向系統(tǒng)、電機系統(tǒng)等方面。海外廠商存在先發(fā)優(yōu)勢,國產(chǎn)勢力也正逐步崛起。
智能汽車是硬件+軟件的結(jié)合,當前世界的頭號玩家就是中美兩國。特斯拉與中國新勢力的競爭,也是中美硬件、軟件科技人才的競爭,也是美國開放合作和中國大兵團作戰(zhàn)的競爭。圍觀一場CEO直接的口水戰(zhàn),固然樂趣十足,但背后的技術路線之爭,才會給我們的生活帶來更深遠的改變。
有意思的是,這段時間國內(nèi)新能源汽車廠商推出的新品像是約好了一般,都配置了激光雷達。長城汽車WEY品牌發(fā)布了“咖啡智能”平臺的首款落地車型“摩卡”,并稱在這款車型上搭載了激光雷達。蔚來汽車對外稱首款電動轎車ET7將搭載激光雷達。未來,可能并不遙遠。
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
