基于自學(xué)習(xí)的組網(wǎng)式交通信號(hào)燈異常檢測(cè)研究
2021-03-15 11:50:02劉永濤樊亞敏
劉永濤,樊亞敏,張 莉,黎 冠
(1. 華北科技學(xué)院 電子信息工程學(xué)院,河北 燕郊 065201; 2. 中國農(nóng)業(yè)大學(xué) 信息與電氣工程學(xué)院,北京 100083)
0 引 言
交通信號(hào)燈作為智慧城市和智慧交通的重要組成部分,工作環(huán)境經(jīng)常要面臨雷雨、低溫、暴曬等惡略天氣,并且需要不間斷運(yùn)行,因此經(jīng)常導(dǎo)致信號(hào)燈故障。 由于位置遠(yuǎn)離交通監(jiān)管中心,分布范圍廣泛,交通監(jiān)管人員無法及時(shí)獲知路口信號(hào)燈的工作狀態(tài),進(jìn)而造成車輛通行不暢或引發(fā)交通事故[1]。 目前通過高清攝像機(jī)圖像識(shí)別技術(shù)進(jìn)行監(jiān)測(cè)判斷[2-3],但該方案監(jiān)測(cè)硬件成本較高,并且在雨、雪、霧、霾等惡劣天氣易發(fā)生信號(hào)燈故障和交通事故的情況下識(shí)別率反而最低。文獻(xiàn) [4]、文獻(xiàn) [5]采用了多路數(shù)據(jù)采集或A/D轉(zhuǎn)換判斷的方式,硬件結(jié)構(gòu)復(fù)雜,單路采集成本較高。
在實(shí)際應(yīng)用中由于信號(hào)燈檢測(cè)裝置一般是在道路修繕完畢后安裝。以上設(shè)計(jì)需要將每一路信號(hào)燈控制線路接入檢測(cè)裝置,因此需要架高或者刨地走線或者為每個(gè)信號(hào)燈桿安裝一套完整的檢測(cè)裝置,包括處理器、GPRS通信模塊、SIM流量卡等,一個(gè)路口需要4套裝置。這些均造成了安裝施工困難和后期運(yùn)維成本較高。
針對(duì)以上問題,通過深入研究交通信號(hào)燈的結(jié)構(gòu)特點(diǎn)和運(yùn)行期間的信號(hào)變化特性,研發(fā)出了一套切實(shí)可行、成本較低、檢測(cè)準(zhǔn)確穩(wěn)定、具有自學(xué)習(xí)功能的無線組網(wǎng)式診斷系統(tǒng)。
1 檢測(cè)裝置系統(tǒng)研究設(shè)計(jì)
系統(tǒng)包括自主學(xué)習(xí)狀態(tài)與故障檢測(cè)狀態(tài)。自主學(xué)習(xí)狀態(tài)是指在預(yù)設(shè)的或者用戶指定的學(xué)習(xí)時(shí)間內(nèi),裝置對(duì)信號(hào)燈的各路電流及電壓進(jìn)行測(cè)量、統(tǒng)計(jì)和記錄;故障檢測(cè)狀態(tài)是指經(jīng)過設(shè)定學(xué)習(xí)之后,裝置可以自動(dòng)地或經(jīng)人工干預(yù)進(jìn)入地對(duì)信號(hào)燈進(jìn)行故障檢測(cè)的狀態(tài)。自主學(xué)習(xí)狀態(tài)與故障檢測(cè)狀態(tài)可以相互轉(zhuǎn)換。
整體使用ZigBee無線網(wǎng)絡(luò)通信技術(shù)[6-9],包含檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器。一個(gè)路口檢測(cè)需要一個(gè)協(xié)調(diào)器,檢測(cè)節(jié)點(diǎn)數(shù)量可任意配置。節(jié)點(diǎn)核心采用CC2530處理器,通過處理器自帶的12位A/D轉(zhuǎn)換器完成交通信號(hào)燈電流采樣,如圖8(a),一個(gè)節(jié)點(diǎn)的4個(gè)互感器可以完成4組左拐、直行、右拐、行人信號(hào)燈的撿測(cè),大大簡化了硬件結(jié)構(gòu),降低了成本。ZigBee協(xié)調(diào)器負(fù)責(zé)建立星型網(wǎng)絡(luò)傳輸方式,接收來自檢測(cè)節(jié)點(diǎn)的診斷結(jié)果,無故障時(shí)執(zhí)行定時(shí)握手通信檢測(cè)節(jié)點(diǎn)是否正常,當(dāng)節(jié)點(diǎn)檢測(cè)出故障后即時(shí)發(fā)送給協(xié)調(diào)器[6]。協(xié)調(diào)器遠(yuǎn)程通信采用GPRS技術(shù)或者當(dāng)下流行的NBIOT技術(shù)與數(shù)據(jù)中心服務(wù)器通信。具體結(jié)構(gòu)如圖1,該方案可以大大簡化施工安裝,降低硬件成本和后期運(yùn)維成本。
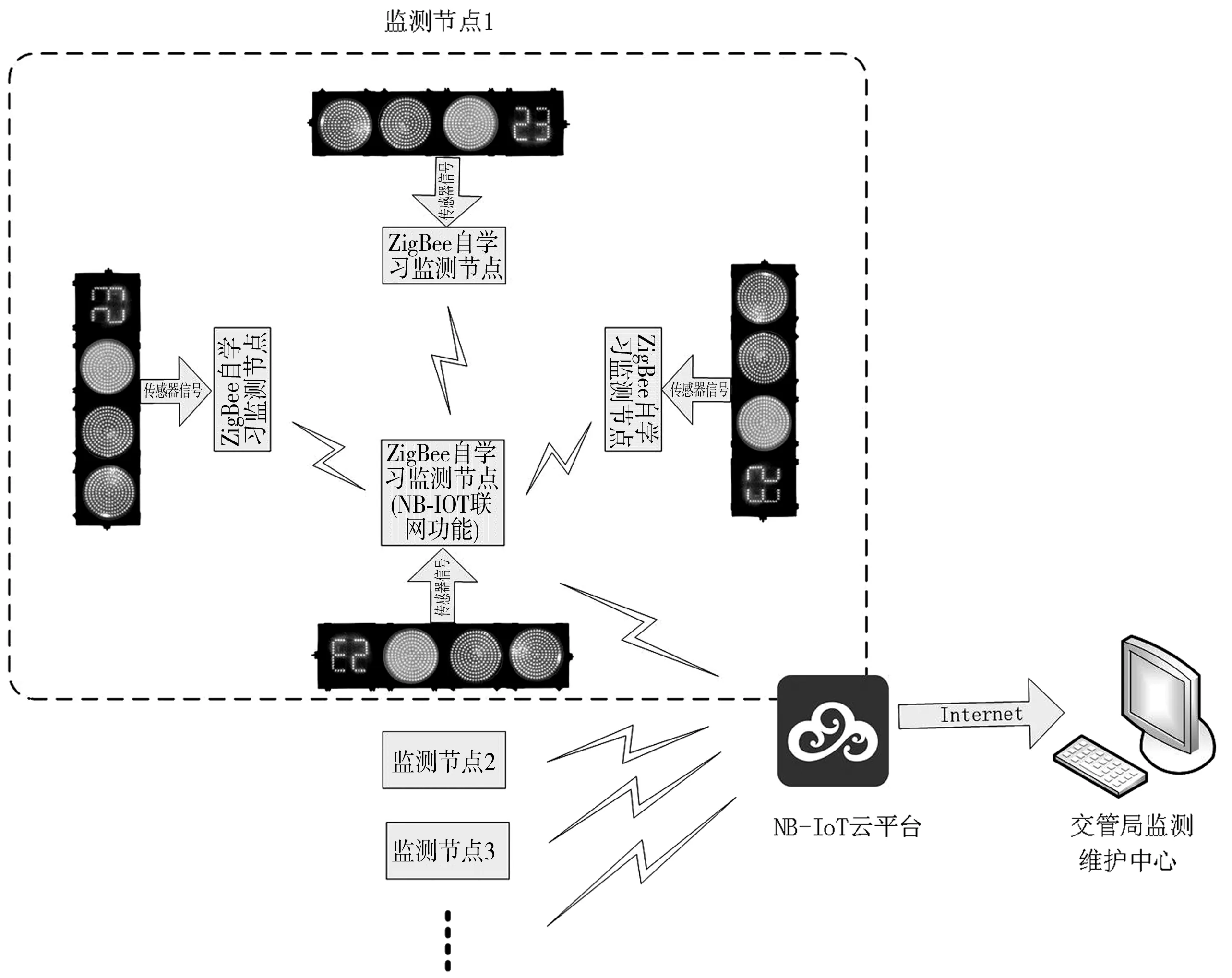
圖1 系統(tǒng)總體結(jié)構(gòu)
1.1 系統(tǒng)硬件結(jié)構(gòu)及信號(hào)分析
檢測(cè)節(jié)點(diǎn)包括了互感器采樣電路、Zigbee處理器電路、按鍵電路、撥碼電路、同步調(diào)試指示電路、電源模塊電路。協(xié)調(diào)器在原節(jié)點(diǎn)電路的基礎(chǔ)上增加了STM32處理器、GPRS遠(yuǎn)程通信電路、OLED顯示電路和按鍵電路。結(jié)構(gòu)如圖2。
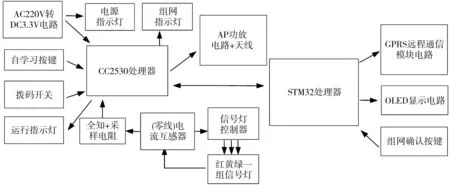
圖2 協(xié)調(diào)器硬件結(jié)構(gòu)
檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器中AC220V轉(zhuǎn)DC3.3V電路用于給本模塊供電,AP功放電路+天線用于Zigbee無線信號(hào)的增強(qiáng),保證組網(wǎng)距離和穩(wěn)定性。
協(xié)調(diào)器具有檢測(cè)節(jié)點(diǎn)的全部功能,工作流程相同,但是增加了檢測(cè)節(jié)點(diǎn)顯示和故障顯示,組網(wǎng)確認(rèn),以及遠(yuǎn)程通信功能。
交通信號(hào)燈單個(gè)顏色燈體點(diǎn)亮為220 V/50 Hz交流電,一組3盞燈(紅、綠、黃)共用一根零線,最大可以滿足兩組同相信號(hào)燈共用一個(gè)采集電路。互感器輸出信號(hào)經(jīng)過全橋整流和巴特沃斯濾波后通過接入合適的采用電阻將采樣信號(hào)的電壓控制在0~2.5 V區(qū)間,頻率為99.911 2 Hz,然后接入CC2530處理器的A/D轉(zhuǎn)換口。
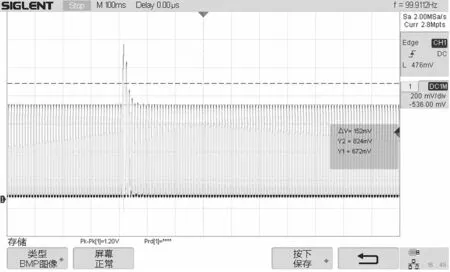
圖3 采樣電壓信號(hào)
通過電流信號(hào)可以發(fā)現(xiàn)當(dāng)信號(hào)燈在紅→綠→黃→紅換相期間采樣信號(hào)電壓均會(huì)出現(xiàn)1~4個(gè)較為明顯的高電平換相脈沖。
信號(hào)燈紅綠換相期間通過圖4(a)可以看出,有兩個(gè)特征點(diǎn)可以判斷出綠燈的起始時(shí)間,首先是綠燈的峰值電壓相差了ΔV=152 mV;其次是紅燈綠燈換相時(shí)存在明顯的尖峰跳變脈沖。通過圖4(b)可以看出,峰值脈沖高出綠燈脈沖ΔV=176 mV。這兩個(gè)特征電壓值可以通過A/D轉(zhuǎn)換輕易識(shí)別判斷。
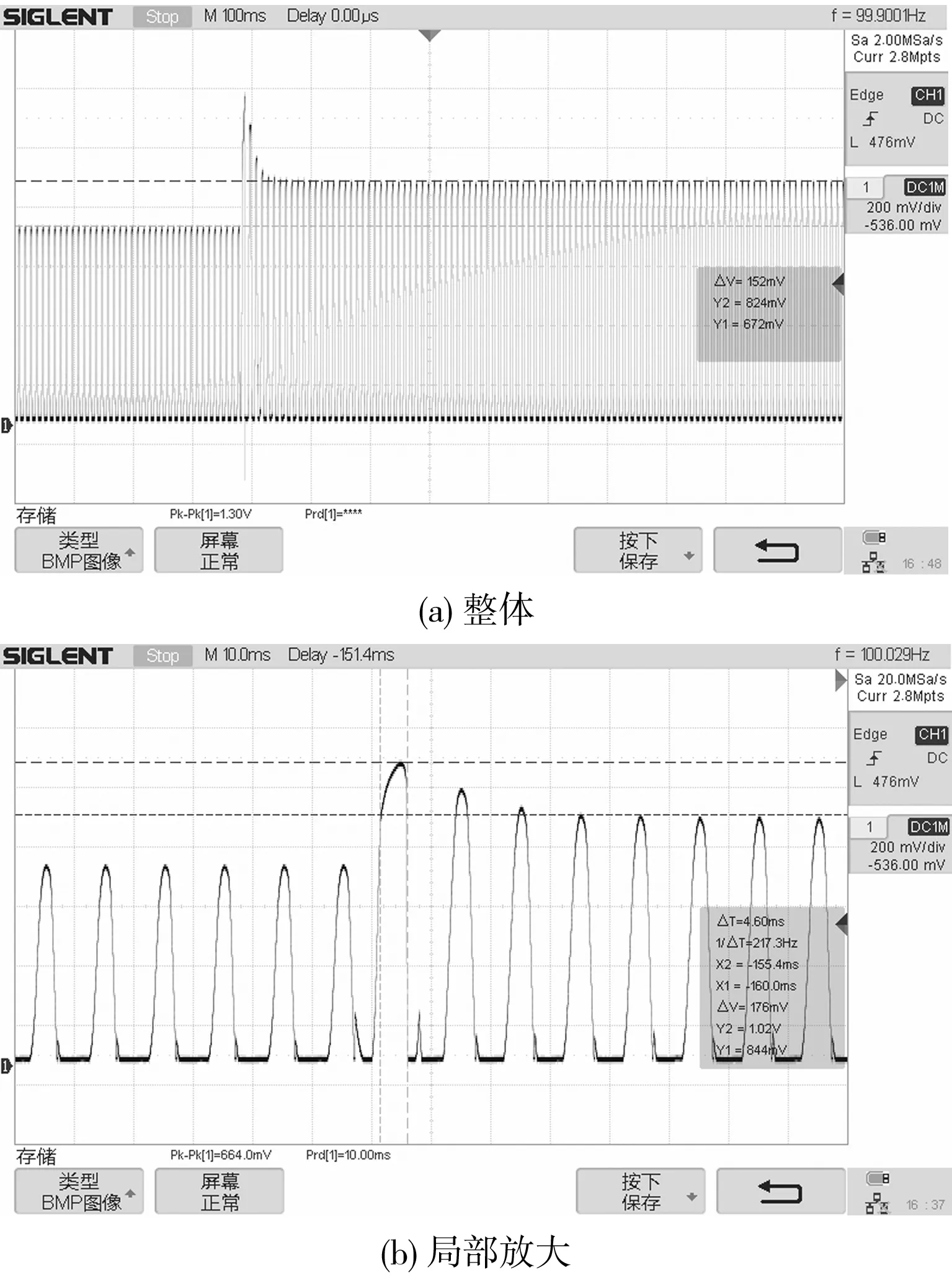
圖4 紅綠換相
信號(hào)燈綠黃換相期間通過圖5(a)可以看出,有兩個(gè)特征點(diǎn)可以判斷出綠燈的結(jié)束時(shí)間和黃燈的起始時(shí)間,首先是綠燈與黃燈的峰值電壓相差了ΔV=152 mV;其次是綠燈黃燈換相時(shí)存在明顯的尖峰跳變脈沖。通過圖5(b)可以看出,峰值脈沖高出綠燈脈沖ΔV=528 mV。同樣這兩個(gè)特征電壓值也可以通過A/D轉(zhuǎn)換輕易識(shí)別判斷。對(duì)于綠燈至黃燈換相期間有閃爍信號(hào)的信號(hào)燈,則此換相點(diǎn)更容易捕捉。
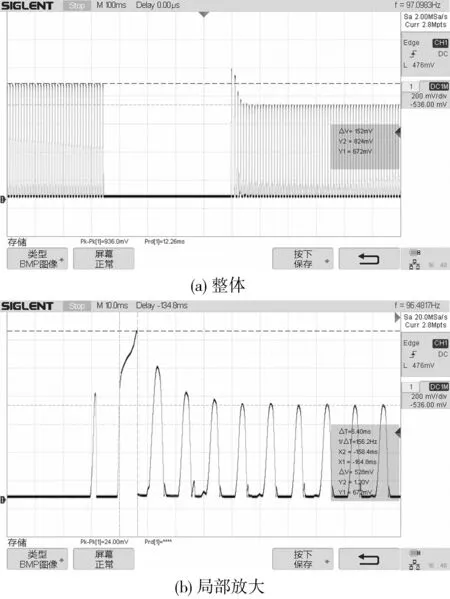
圖5 綠黃換相
信號(hào)燈黃紅換相期間總體相位如圖3,黃紅信號(hào)燈采樣電壓信號(hào)基本相同,放大采樣后信號(hào)如圖6。很難通過信號(hào)電壓判斷出黃燈和紅燈切換,但是切換時(shí)的換相脈沖非常明顯,脈沖幅值差可以達(dá)到ΔV=348 mV,ΔT=4.4 ms。通過A/D采樣仍然可以準(zhǔn)確判斷出黃燈結(jié)束時(shí)間和紅燈起始時(shí)間。
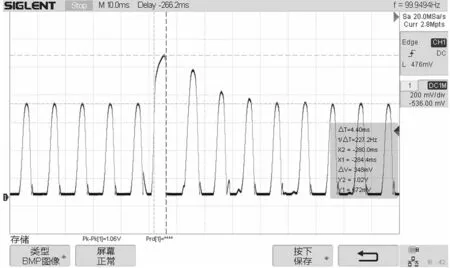
圖6 黃紅換相
1.2 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)工作時(shí),首先通過信號(hào)機(jī)設(shè)定好信號(hào)燈使之正常運(yùn)行。將檢測(cè)節(jié)點(diǎn)互感器接入信號(hào)機(jī)每組信號(hào)燈的零線端,任意時(shí)間按下學(xué)習(xí)鍵,信號(hào)燈循環(huán)超過一個(gè)周期,則系統(tǒng)完成運(yùn)行狀態(tài)的學(xué)習(xí),保存為模式1。如果信號(hào)機(jī)還有其它模式則在執(zhí)行其它模式期間按下學(xué)習(xí)鍵可完成多種模式的學(xué)習(xí)。軟件設(shè)計(jì)流程如圖7。
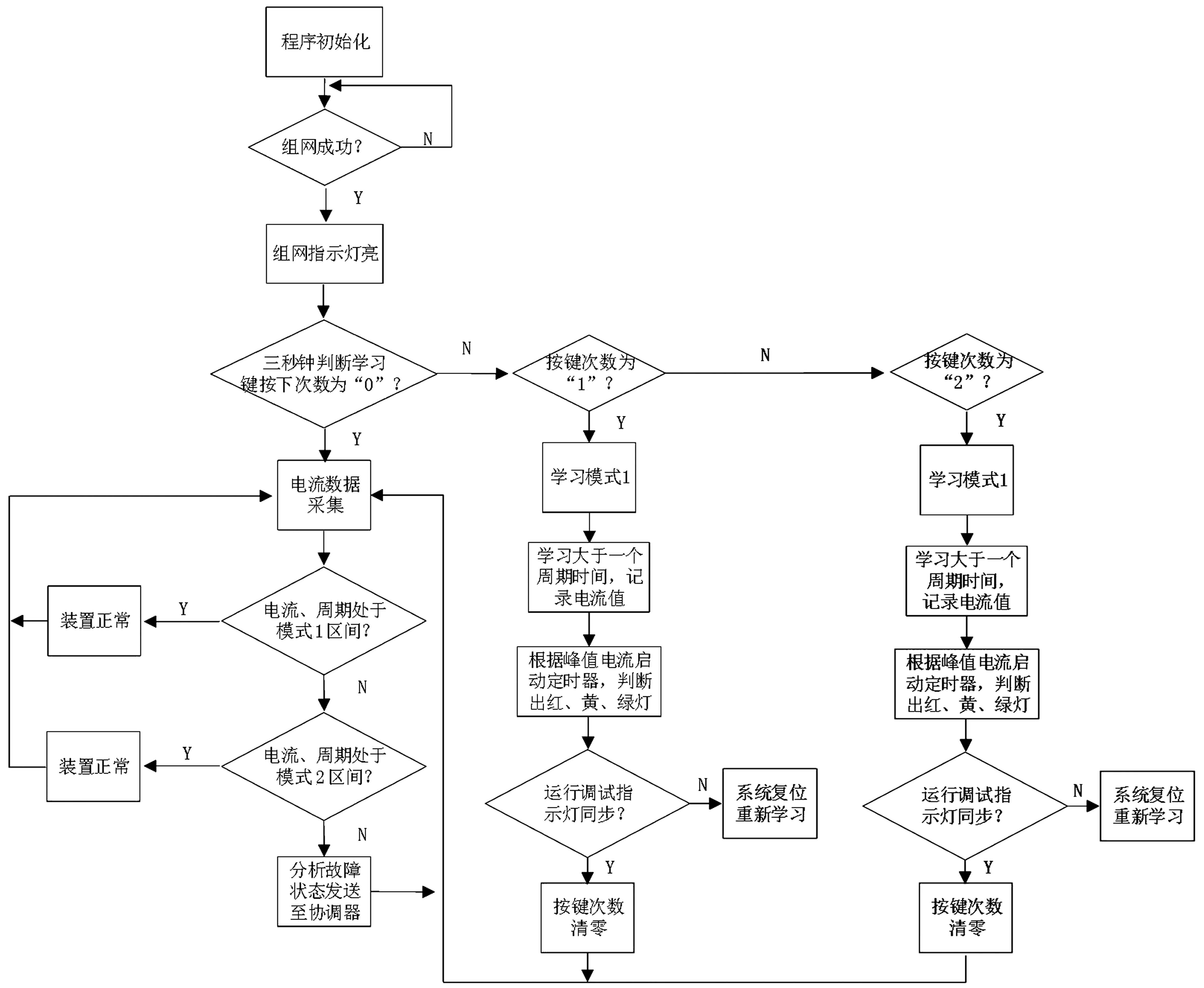
圖7 軟件流程
關(guān)于檢測(cè)裝置的檢測(cè)方法,步驟如下:
1)組網(wǎng):在一個(gè)信號(hào)燈安裝點(diǎn),將檢測(cè)節(jié)點(diǎn)上的撥碼開關(guān)撥至與協(xié)調(diào)器撥碼開關(guān)相同狀態(tài),檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器上電,協(xié)調(diào)器自動(dòng)搜索模塊,協(xié)調(diào)器顯示出全部相同地址檢測(cè)節(jié)點(diǎn)后通過按下協(xié)調(diào)器上組網(wǎng)確認(rèn)按鍵完成網(wǎng)絡(luò)組建。檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器組網(wǎng)完成后組網(wǎng)指示燈點(diǎn)亮。
2)學(xué)習(xí)模式:檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器上電,組網(wǎng)指示燈點(diǎn)亮,3 s內(nèi)人為按下自學(xué)習(xí)按鍵一次,則進(jìn)入模式1的學(xué)習(xí),按下兩次則進(jìn)入模式2的學(xué)習(xí)。如沒有按下自學(xué)習(xí)按鍵則學(xué)習(xí)模式被跳過,直接進(jìn)入正常工作模式。
3 s計(jì)時(shí)滿,如自學(xué)習(xí)按鍵有操作則CC2530處理器開始對(duì)信號(hào)燈電流值開始采集,采集時(shí)間大于信號(hào)燈一個(gè)正常工作周期。采集期間節(jié)點(diǎn)根據(jù)采集電流峰值啟動(dòng)CC2530處理器內(nèi)部定時(shí)器,記錄3個(gè)時(shí)間段,邏輯判斷出紅、黃、綠燈點(diǎn)亮?xí)r間,存儲(chǔ)3種燈電流采樣值于CC2530處理器內(nèi)部閃存當(dāng)中,完成信號(hào)燈正常模式的電流值和時(shí)間統(tǒng)計(jì)。學(xué)習(xí)完成后自動(dòng)重啟。學(xué)習(xí)模式核心在于通過換相電流峰值計(jì)算出各相燈的點(diǎn)亮?xí)r間。
3)正常工作模式:檢測(cè)節(jié)點(diǎn)和協(xié)調(diào)器上電,組網(wǎng)指示燈點(diǎn)亮,如果3 s內(nèi)自學(xué)習(xí)按鍵沒有操作,則按鍵標(biāo)志位為零檢測(cè)節(jié)點(diǎn)進(jìn)入正常檢測(cè)狀態(tài)。采集電流值和各相燈的點(diǎn)亮?xí)r間與各存儲(chǔ)模式數(shù)據(jù)相比較,處于正常范圍內(nèi)則系統(tǒng)正常,不在正常范圍內(nèi)則根據(jù)邏輯關(guān)系推導(dǎo)出是否信號(hào)燈的故障,并將檢測(cè)結(jié)果同步顯示于運(yùn)行指示燈上。如有故障則將故障信息通過Zigbee網(wǎng)絡(luò)傳輸給協(xié)調(diào)器,協(xié)調(diào)器在OLED屏上顯示故障信息并通過GPRS網(wǎng)絡(luò)上報(bào)給遠(yuǎn)程服務(wù)器端進(jìn)行后期處理。
2 系統(tǒng)設(shè)計(jì)實(shí)現(xiàn)及驗(yàn)證
實(shí)際完成的檢測(cè)節(jié)點(diǎn)如圖8(a),通過板載三色LED可以完全同步顯示出信號(hào)燈當(dāng)前狀態(tài)。與協(xié)調(diào)器進(jìn)行實(shí)時(shí)通信交互,測(cè)試了雙向綠燈同時(shí)點(diǎn)亮、單組信號(hào)燈兩燈同時(shí)點(diǎn)亮、單盞燈不亮以及時(shí)序錯(cuò)誤等多種故障狀態(tài),節(jié)點(diǎn)均可以快速檢測(cè)出故障現(xiàn)象,發(fā)送給協(xié)調(diào)器。協(xié)調(diào)器同時(shí)還具有節(jié)點(diǎn)同樣的檢測(cè)功能,實(shí)物如圖8(b),最后檢測(cè)結(jié)果通過GPRS模塊發(fā)送節(jié)點(diǎn)編碼和故障編碼至后臺(tái)服務(wù)器。
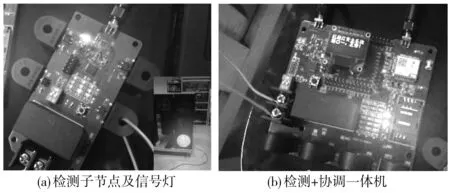
圖8 實(shí)際測(cè)試
由于CC2530內(nèi)部具有12位A/D轉(zhuǎn)換器,轉(zhuǎn)換分辨率為0~2 047,通過其采集信號(hào)電壓值,采集數(shù)據(jù)如表1。經(jīng)過整流之后的波形頻率為100 Hz,周期為10 ms,處理器一個(gè)周期完成10次A/D采集。
2.1 峰值檢測(cè)算法實(shí)現(xiàn)
處理器完成10次采樣后數(shù)據(jù)分布并不一定符合峰值分布曲線,尤其是換相期間脈沖波形。因此需要對(duì)采樣值進(jìn)行數(shù)據(jù)排序,找到信號(hào)峰值和次峰值,筆者采用了希爾排序算法。
例如紅綠燈換相脈沖采樣數(shù)據(jù):{0251,0347,1509,2047,0251,0250,0251,0251,0250,0251},因?yàn)椴蓸訑?shù)據(jù)值一組有10個(gè),所以第一次補(bǔ)償step=10/2=5,其希爾排序算法的過程如圖9。
可見采用希爾排序算法,經(jīng)過3次排序即可快速完成每組10個(gè)采樣數(shù)據(jù)的從小到大排序。
2.2 時(shí)序判定分析
通過采樣數(shù)據(jù)排序后分析,每組10個(gè)數(shù)據(jù)中后3個(gè)數(shù)據(jù)可以很直觀地區(qū)分出換相脈沖值的存在。因此截取了40組采樣排序完成后的每組后3個(gè)數(shù)據(jù)峰值、次峰值、第3峰值進(jìn)行分析,如表1。
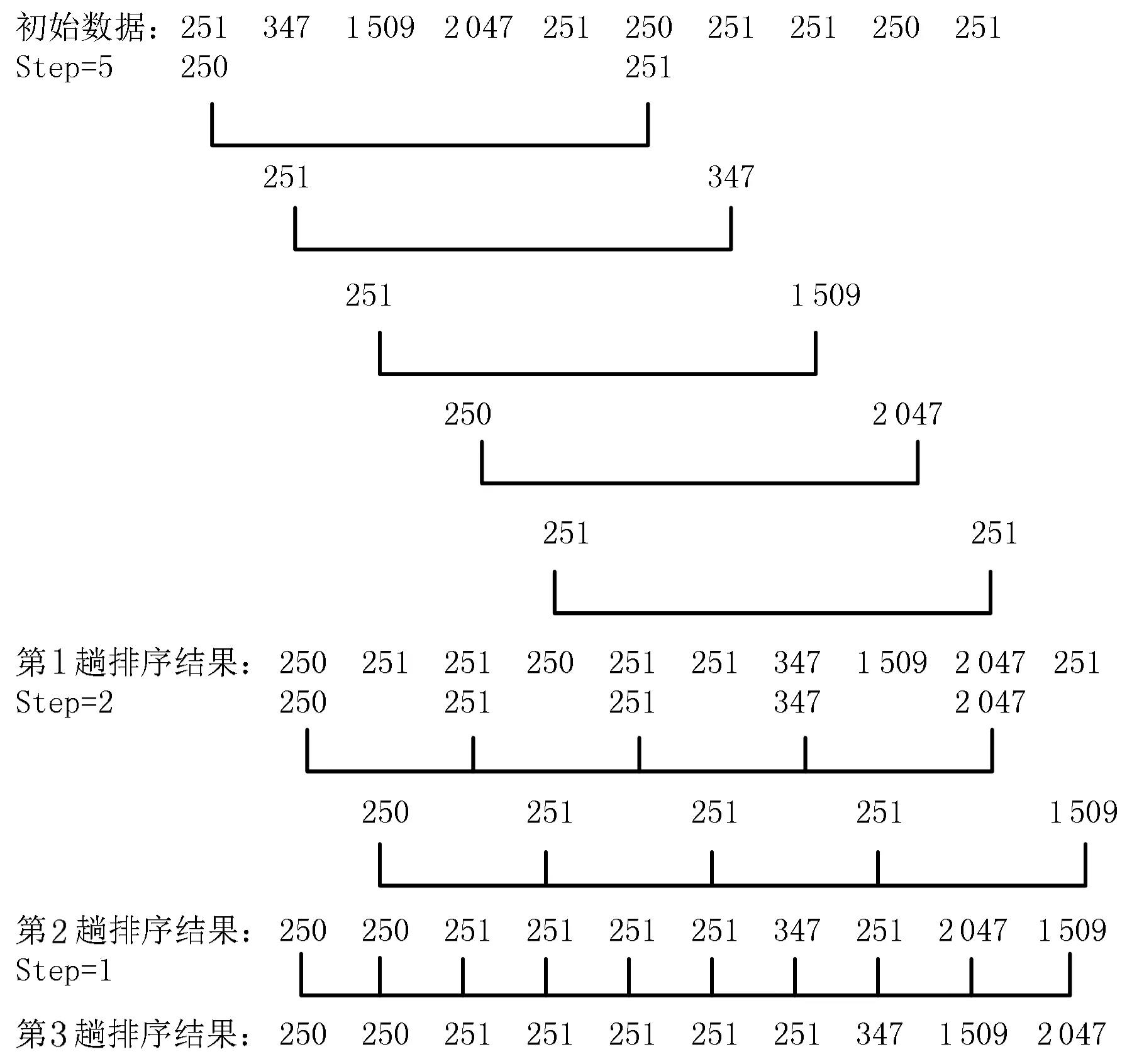
圖9 希爾排序算法過程
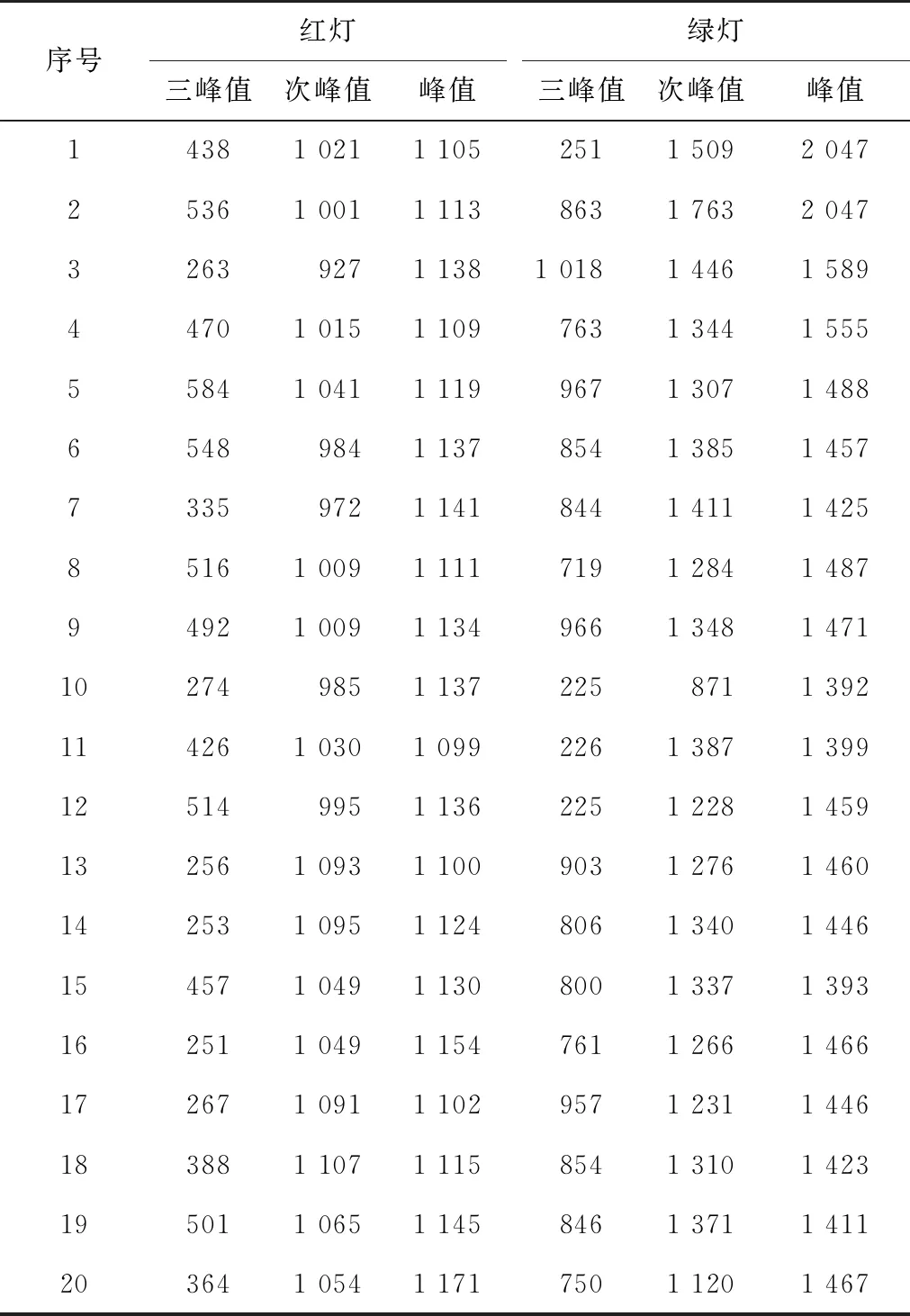
表1 紅綠燈換相脈沖采集數(shù)據(jù)
通過分析表1中綠燈峰值和次峰值,可以很容易判斷出綠燈第1、2組數(shù)據(jù)為紅燈-綠燈之間的換相脈沖,此值明顯高于紅燈和綠燈正常峰值。為了增加系統(tǒng)判斷穩(wěn)定性,避免高次雜波的影響,將每組數(shù)據(jù)峰值和次峰值取平均作為判斷換相的依據(jù),通過此值可以準(zhǔn)確得到信號(hào)燈換相的起始時(shí)間和結(jié)束時(shí)間。
從表1中峰值也可以看出,綠燈峰值明顯高于紅燈峰值。因此可以判斷出此峰值時(shí)信號(hào)燈為綠燈狀態(tài),以此作為信號(hào)燈時(shí)序判斷的起始點(diǎn),從而準(zhǔn)確捕捉綠燈、黃燈、紅燈的點(diǎn)亮?xí)r間。通過綠燈、黃燈、紅燈的判斷峰值浮動(dòng)閾值可以準(zhǔn)確地判斷出有無單組多燈同時(shí)點(diǎn)亮或出現(xiàn)不亮的故障。
2.3 滑動(dòng)窗口差值判斷法
為了判斷信號(hào)燈換相時(shí)間的節(jié)點(diǎn),通常使用的方法是設(shè)定一個(gè)固定的電壓采樣閾值,若檢測(cè)到電壓采樣值超過這個(gè)閾值,則判定該時(shí)刻換相事件出現(xiàn)[11]。但這種方式未考慮在不同規(guī)格的信號(hào)燈以及信號(hào)燈老化等問題引起的閾值偏差,該偏差往往會(huì)造成誤判斷,因此固定閾值法具有較大局限性。為了解決這一問題,筆者提出一種雙滑動(dòng)窗口判斷法,首先通過滑動(dòng)窗口濾波生成滑動(dòng)判據(jù)數(shù)組,然后再利用滑動(dòng)窗口進(jìn)行換相判斷和信號(hào)燈顏色判斷。滑動(dòng)判據(jù)數(shù)據(jù)計(jì)算如式(1):
(1)
式中:m和T0為滑動(dòng)窗口長度,本設(shè)計(jì)中該值設(shè)為3;D(t)是為濾波器的輸出即滑動(dòng)均值數(shù)據(jù),其中t為1,2,3,…,7保留7組滑動(dòng)窗口采樣均值數(shù)據(jù);F1n和F2n為單脈沖A/D采集峰值和次峰值。
例如,從紅燈第18組數(shù)據(jù)開始,按3個(gè)長度進(jìn)行滑動(dòng)均值計(jì)算,可得到結(jié)果如表2。

表2 滑動(dòng)判據(jù)數(shù)組
在執(zhí)行滑動(dòng)窗口換相脈沖掃描時(shí),滑動(dòng)串口首先以4組數(shù)據(jù)為單位滑動(dòng),判據(jù)數(shù)組需要存儲(chǔ)區(qū)中開辟7個(gè)數(shù)據(jù)的暫存區(qū),將信號(hào)采集非換相脈沖A/D值濾除不予保存。每新計(jì)算出一組滑動(dòng)均值便存入暫存區(qū)中,同時(shí)去掉一個(gè)最老數(shù)據(jù),保持這7個(gè)數(shù)據(jù)始終是最新更新的數(shù)據(jù)。程序采用環(huán)型隊(duì)列結(jié)構(gòu)很好地滿足了這種數(shù)據(jù)存放方式。
即使燈組大小型號(hào)改變或者后期老化使信號(hào)電壓發(fā)生偏差,因?yàn)槠浠瑒?dòng)均值差的設(shè)置范圍足夠?qū)挘⑶彝ㄟ^按鍵設(shè)定可以選定型號(hào)從而適應(yīng)不同的應(yīng)用場(chǎng)景。滑動(dòng)均值判別方法流程如圖10。
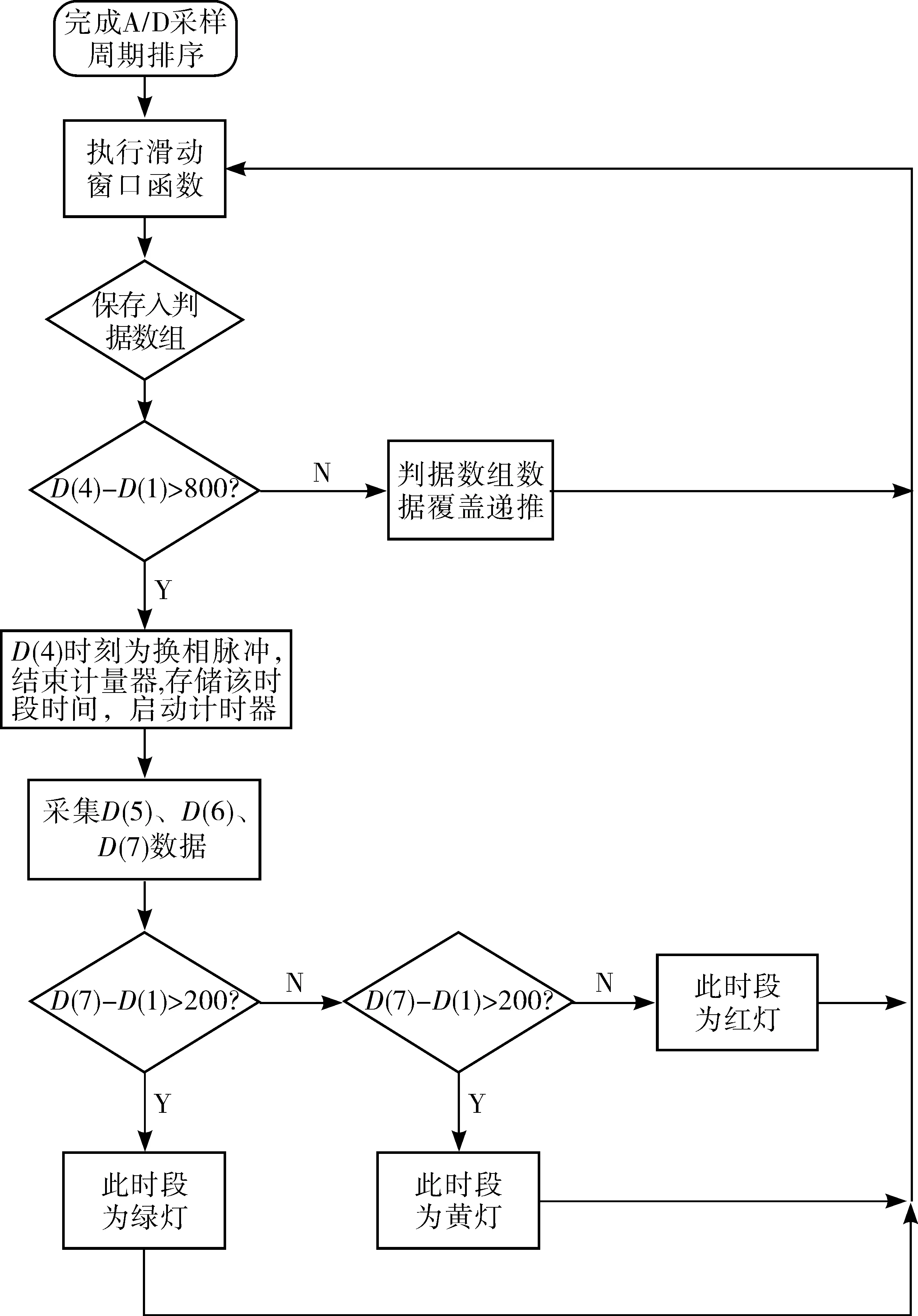
圖10 滑動(dòng)窗口均值判據(jù)流程
2.4 測(cè)試驗(yàn)證
系統(tǒng)采用南京永順交通設(shè)備有限公司生產(chǎn)的標(biāo)準(zhǔn)300型信號(hào)燈和通用信號(hào)機(jī)進(jìn)行了實(shí)際測(cè)試。過程測(cè)試了整個(gè)交通信號(hào)燈的正常工作時(shí)序?qū)W習(xí)和檢測(cè)以及故障模擬診斷。學(xué)習(xí)和檢測(cè)中設(shè)定信號(hào)燈綠燈為30 s,黃燈為3 s,紅燈為27 s,一鍵學(xué)習(xí)值和后期檢測(cè)數(shù)據(jù)如表3。
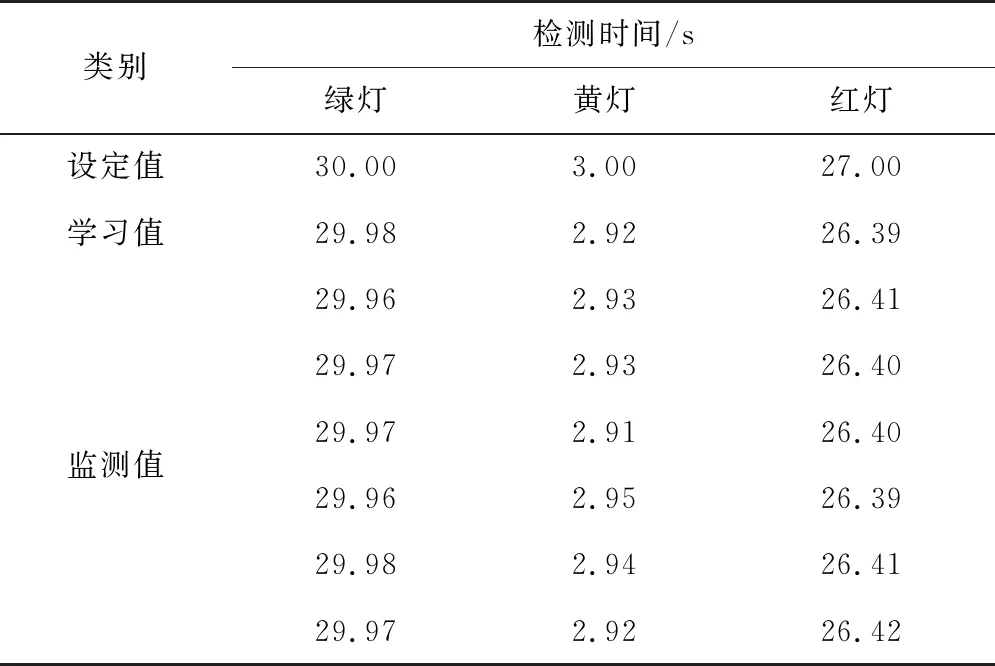
表3 節(jié)點(diǎn)檢測(cè)時(shí)間數(shù)據(jù)
從最后實(shí)際測(cè)試效果來看,黃燈的時(shí)間檢測(cè)準(zhǔn)確度較低,但也達(dá)到了97%以上,檢測(cè)數(shù)據(jù)最大時(shí)間浮動(dòng)差為0.04 s,穩(wěn)定度非常理想,經(jīng)過誤差補(bǔ)償和時(shí)間閾值判據(jù)分析裝置沒有出現(xiàn)誤判斷現(xiàn)象。
3 結(jié) 語
通過與現(xiàn)有研究和實(shí)施方案相比,筆者設(shè)計(jì)具有以下優(yōu)點(diǎn):
1)通過無線組網(wǎng)的方式,解決了路口多信號(hào)燈之間檢測(cè)線纜鋪設(shè)施工問題,確保一個(gè)路口最多只需要一個(gè)故障檢測(cè)遠(yuǎn)程通信協(xié)調(diào)器,降低了硬件成本和后期運(yùn)行成本,使信號(hào)燈故障檢測(cè)更加實(shí)用化。
2)通過零線電流檢測(cè)法,使一組(紅、黃、綠)信號(hào)燈只需要一路檢測(cè)處理電路。相對(duì)于傳統(tǒng)每個(gè)燈一路檢測(cè)處理電路的設(shè)計(jì),此部分降低硬件成本50%以上,減少了自身故障隱患。根據(jù)實(shí)際信號(hào)燈安裝情況,一個(gè)自學(xué)習(xí)檢測(cè)節(jié)點(diǎn)最多可以檢測(cè)出同道路直行、左轉(zhuǎn)、右轉(zhuǎn)6盞信號(hào)燈故障。一個(gè)信號(hào)機(jī)只需要一個(gè)協(xié)調(diào)器和一個(gè)節(jié)點(diǎn)即可完成路口四方向信號(hào)燈的監(jiān)測(cè)。
3)學(xué)習(xí)效率明顯提升。系統(tǒng)增加了學(xué)習(xí)模式按鍵,可以在信號(hào)燈運(yùn)行兩個(gè)周期以內(nèi)完成一種模式學(xué)習(xí)。能夠完成正常模式、夜晚黃燈模式、潮汐模式等多種狀態(tài)學(xué)習(xí)和后期自動(dòng)模式故障判斷,去除累積時(shí)間誤差影響。
4)檢測(cè)模塊增加運(yùn)行同步同色指示燈,將檢測(cè)狀態(tài)實(shí)時(shí)體現(xiàn)在節(jié)點(diǎn)上,方便進(jìn)行安裝時(shí)調(diào)試觀測(cè)。
設(shè)計(jì)中系統(tǒng)的組網(wǎng)、學(xué)習(xí)、故障分析判斷等均由檢測(cè)節(jié)點(diǎn)完成,達(dá)到了邊緣計(jì)算的效果,減少了數(shù)據(jù)發(fā)送量,降低了后臺(tái)服務(wù)器處理負(fù)擔(dān)。通過長時(shí)間實(shí)際運(yùn)行,故障監(jiān)測(cè)效果良好。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
