環境激勵下港口起重機結構模態參數識別實驗研究
2021-03-15 08:06:10黃金晶王嘉卿
起重運輸機械 2021年19期
楊 凱 黃金晶 王嘉卿
上海海事大學工程訓練中心 上海 201306
0 引言
模態參數對港口起重機的結構設計,特別是港口起重機結構的減振、抗振設計具有非常重要的指導意義。傳統模態測試方法激勵起港口起重機大型結構較困難,且激勵很難測量,在得到準確輸入與輸出方面有很大局限性,已成為港口起重機發展的障礙。在港口起重機領域,使用時域信號準確識別其結構的模態參數是迫切需要解決的問題。大型港口起重機的結構復雜,所需測點數較多,對采集儀通道數和傳感器數量的要求較大,測試難度大,成本高,這也是當今大型港口起重機測試的一項難點。
使用擴展的隨機減量技術與ITD法相結合的RDT/ITD結合法識別環境激勵下港口起重機結構的模態參數,使用運行狀態模態分析技術(OMA),識別大型港口起重機結構的模態參數,以克服傳統模態測試方法的不足。運用移動測點法進行試驗,以少量的傳感器以及有限的通道數測試大型港口起重機主梁結構的振動信號,這種方法為解決通道數和傳感器不足提供一個實例依據。
1 工況描述及有限元分析
1.1 工況描述
以JAJ-15t-37.25mA4型岸邊集裝箱起重機為研究對象,在自然環境下(地處海邊,有較明顯的風載荷激勵)進行實驗模態分析。該機起升高度為23.0 m,工作級別為A4,主梁形式為桁架雙主梁,單小車形式。
1.2 有限元分析
整機有限元模型如圖1所示。利用Ansys建立港口起重機模型,并使用模態分析模塊進行模態分析,得到模態分析結果。前五階固有頻率及振型描述見表1。
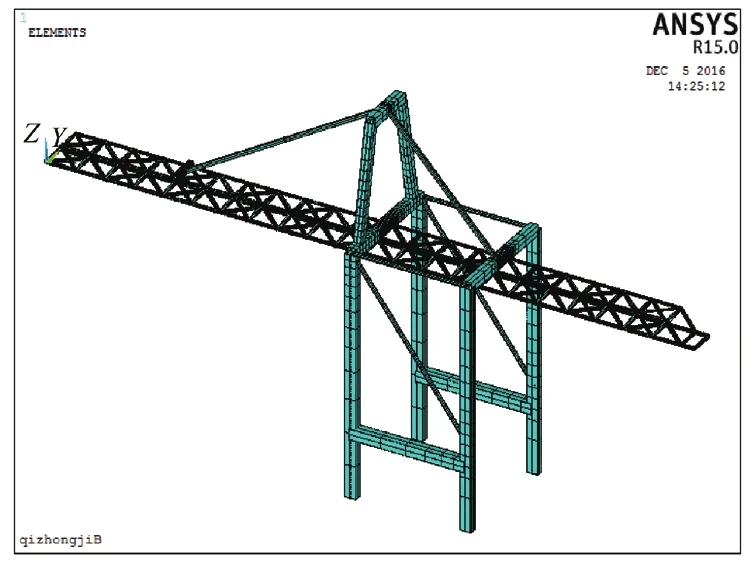
圖1 整機有限元模型

表1 大梁不同階次的振型描述
2 擴展RDT/ITD港機模態識別
2.1 試驗方案
港口起重機模態試驗采用頻率范圍為0.17~100 Hz的941B超低頻拾振器,采用INV3062C數據采集儀采集起重機振動信號,用DASP分析軟件進行信號分析。
港口起重機大梁結構總長共85.30 m,對其進行7等分得到共8個截面的16個測點,如圖2所示。由于起重機主梁縱向影響較小,可暫不考慮,只考慮垂向和橫向,共4×8=32測量通道數,同一截面的2個測點都要考慮2個方向,主梁結構部分振型會存在扭轉形式,同時測量同一截面2個測點可實際反映出主梁的扭轉振型形式。
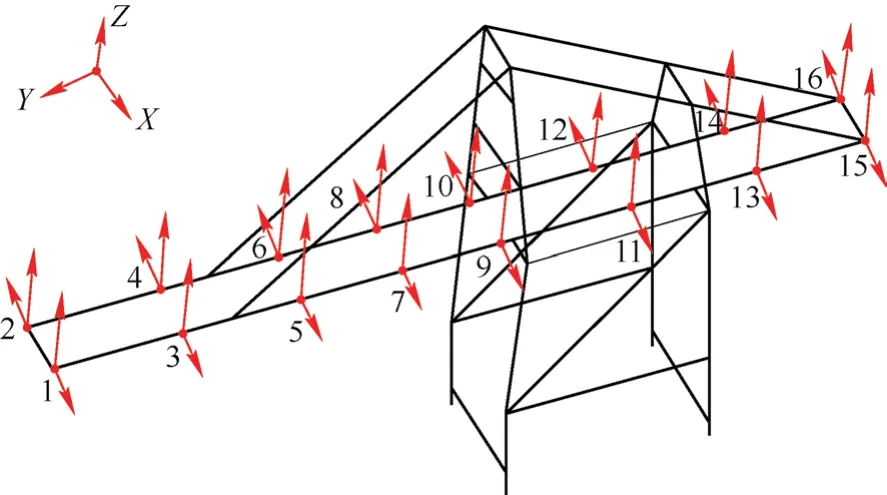
圖2 港口起重機大梁結構測點布置
在實際測試中,經調試采集儀共7個通道數可用,具體方案為:確定一個固定參考點,使用7個低頻拾振器,在16個擬定的測點,分別在起重機橫向(X)和垂向(Y),在同一參考點下進行分批次移動測試。
為防止選取固定參考點時,所選參考點為結構的振型節點,故選取整個結構的前端點1(X)和1(Z)為每次移動測量試驗的固定參考點,通過多次移動其他傳感器來實現對起重機整體主梁模態的測試(見表2),每組試驗的采樣時間為1 800 s。
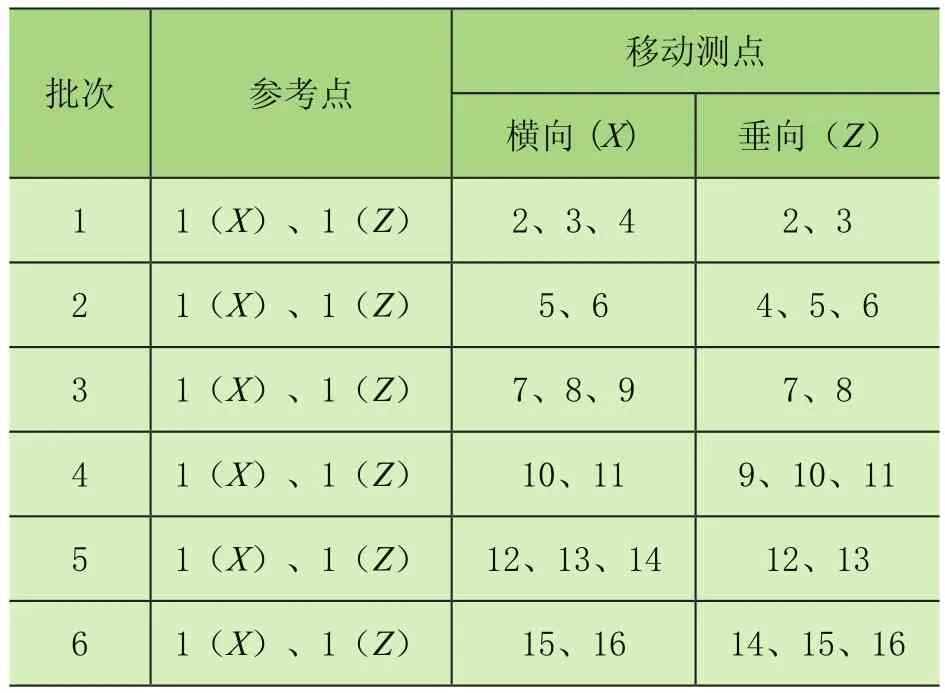
表2 主梁測試方案
1號測點(即固定參考點)低頻拾振器安裝情況如圖3,低頻拾振器采用磁鋼吸附在測點位置,垂向的測試采用垂直類型的低頻拾振器,橫向的測試采用水平類型的低頻拾振器。

圖3 1號測點(固定參考點)低頻拾振器安裝情況
2.2 RDT/ITD模態參數識別
由于實驗方案采用了移動測點法的測試方法,需要經過多批次進行測試采樣,這就形成了多種工況下的測試信號,不同批次的振動信號外界條件不一樣,卻有相同的參考點。所以,在進行模態分析時,將不同工況下的振動信號分批次處理分析,然后基于參考點進行總結。將每一批次的測點相同方向的進行同時處理分析,即同一批次橫向測點的信號處理分析一次,參考點為參考點橫向的測試信號;同一批次的垂向測點信號處理分析一次,參考點為參考點垂向的測試信號。
按照上述分析方案,將實驗所得各測點的時域波形信號輸入Matlab中,用隨機減量法程序進行分析處理,得到隨機減量函數,即自由響應函數。圖4是測點16隨機減量法處理后得到的自由響應函數圖像。
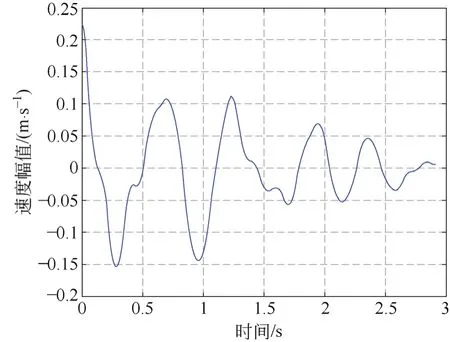
圖4 測點16RDT處理后得到的自由響應函數
為檢驗隨機減量處理后抽取的信號是否仍具有原信號的頻譜特性,在此對原信號和隨機減量處理后的信號做功率譜分析,測點16的信號隨機減量處理前后功率譜如圖5所示。

圖5 信號隨機減量處理前后功率譜
由圖5可知,隨機減量技術處理后的信號與原始信號的頻譜峰值處于同一頻率范圍內,并未出現虛假頻率。所以,隨機減量信號保證的處理后信號的能量分布與原始信號一致,保留了原始信號的頻譜特性。
通過對測點采取延時采樣,可得到虛擬測點,構建響應矩陣,然后根據響應矩陣求解結構模態參數。ITD識別方法的擬合曲線與原始自由響應信號擬合圖如圖6所示。由圖6可知,識別擬合效果較好,擬合曲線與原始信號比較并未出現遺漏擬合或虛假擬合。對不同批次的實驗數據依次進行識別,得到表4所示模態頻率識別結果。由表4可知,頻率識別結果標準差較小,識別值得數據浮動不大,頻率識別結果較可靠。港口起重機模態阻尼識別結果如表5所示。
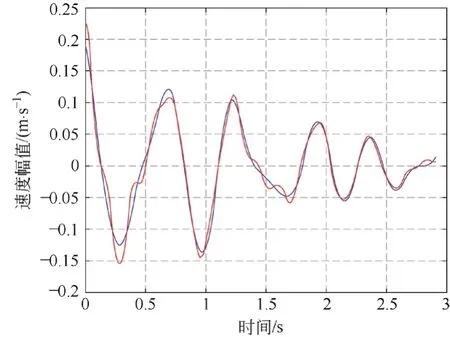
圖6 擬合曲線與原始自由響應信號擬合圖

表4 港口起重機模態頻率識別結果

表5 港口起重機模態阻尼識別結果
由表5可知,阻尼識別值的標準差也在允許范圍內,與頻率識別值得標準差相比,數據浮動稍大,數據在可接受范圍內。
2.3 港機結構模態識別結果比較
除了考慮使用隨機減量法對響應信號進行處理分析,然后再進行模態參數識別外,為比較識別結果的準確性,本文使用DASP V11模態分析軟件,運用時域模態參數識別較為成熟的隨機子空間法(SSI)以及poly-IIR法,同時對本實驗所采集的數據進行了處理分析。這3種方法的模態參數識別結果見表6。
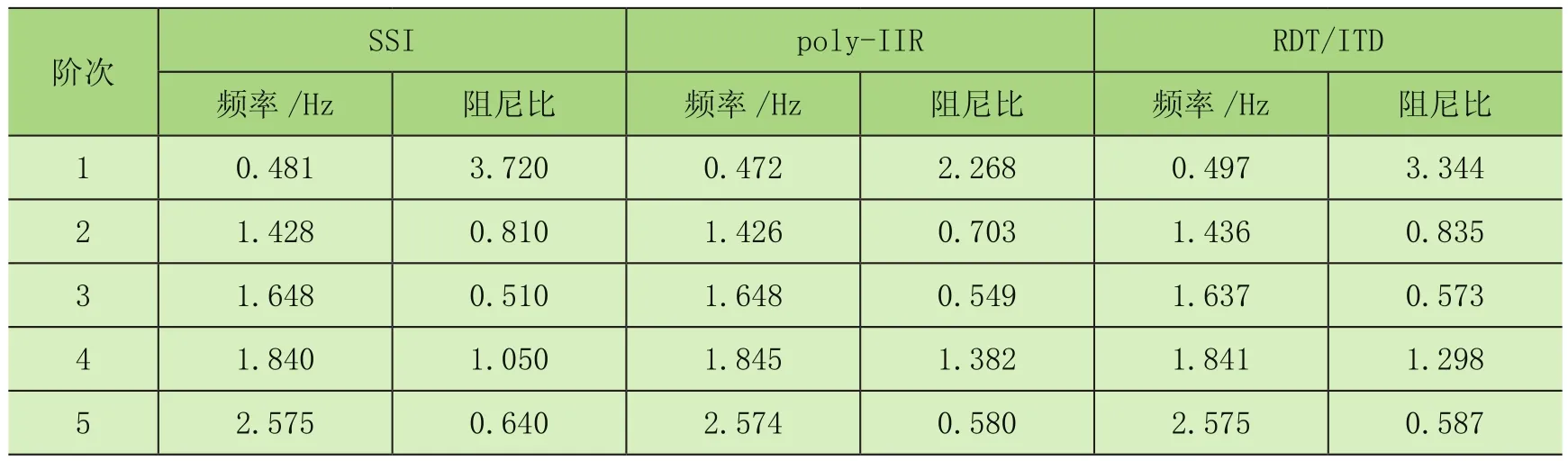
表6 各方法識別港及結構模態參數值
由表6可知,隨機子空間法(SSI)、poly-IIR、RDT/ITD法所識別的模態頻率值與有限元模型計算的理論值之間的誤差都在10%以內,這3種識別方法所識別出的頻率值相差不大,接近港機實體的真實模態值。
由表7可知,這3種方法頻率值的識別結果相差不大,說明這3種方法所識別出的頻率值基本吻合,RDT/ITD法識別出的頻率值與SSI法、poly-IIR法一樣有相當高的可信度。在阻尼識別方面,雖然吻合性不像頻率值那么高,但具有相同的走勢,且識別值處于一定范圍內,尚可接受,仍有提升空間。

表7 有限元計算值與各方法結果比較分析
3 結論
1)利用RDT/ITD結合算法識別的港及結構的模態參數結果與SSI和poly-IIR法識別結果具有一致性。
2)利用RDT/ITD結合算法識別大型結構的模態參數具有可行性。
3)RDT/ITD結合識別法所識別的頻率值可靠度很好,對于阻尼的識別還存在一定的誤差。
本次實驗也證明了使用移動測點法代替多測點同時測量在大型港口機械模態測試中的可行性。
猜你喜歡
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代工人(2019年20期)2019-12-13 08:26:11
電子制作(2018年11期)2018-08-04 03:25:42
海洋世界(2016年12期)2017-01-03 11:33:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00