
一種改進(jìn)的基于RSSI測(cè)距的室內(nèi)三維修正定位算法
2021-03-15 07:12:20李時(shí)銘謝建中楊棟梁張丙釗
船電技術(shù) 2021年3期
徐 進(jìn),李時(shí)銘,謝建中,楊棟梁,張丙釗
(武漢船用電力推進(jìn)裝置研究所,武漢 430064)
0 引言
近年來,無線傳感器網(wǎng)絡(luò)技術(shù)發(fā)展迅速,廣泛應(yīng)用于礦井人員定位、搶險(xiǎn)救災(zāi)、環(huán)境監(jiān)測(cè)、智能家居等領(lǐng)域,對(duì)人們的生活和工作產(chǎn)生了重大的影響。
當(dāng)前,大多數(shù)定位算法只是針對(duì)無線傳感器的二維網(wǎng)絡(luò)展開研究的,在實(shí)際應(yīng)用中并非總是如此。無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)也會(huì)經(jīng)常處于三維環(huán)境中,如礦井、森林、海洋和復(fù)雜的建筑物等,這些場(chǎng)合下需要提供節(jié)點(diǎn)的三維位置信息。
三維空間運(yùn)算更加復(fù)雜,三維定位技術(shù)的研究還有待深入。目前已有部分關(guān)于三維定位算法研究的文獻(xiàn)。為了提高定位精度,大多數(shù)算法采用增加節(jié)點(diǎn)數(shù)量,提高成本來實(shí)現(xiàn)。但如果控制成本,減少節(jié)點(diǎn)數(shù)量,則運(yùn)算量會(huì)增加,且定位誤差較大。本文提出了一種節(jié)點(diǎn)數(shù)量少,定位誤差小的基于RSSI的改進(jìn)三維修正定位算法。
1 RSSI測(cè)距模型
1.1 室內(nèi)無線信號(hào)傳播模型
在實(shí)際應(yīng)用環(huán)境中,由于多徑、繞射、遮擋物等因素,采用對(duì)數(shù)-常態(tài)分布模型將更加合理[1]。對(duì)數(shù)-常態(tài)分布模型如下:

式中:PL(d)為經(jīng)過距離d后的路徑損耗;PL(d0)為自由空間損耗,d0為參考距離,常取1 m;Xδ為平均值為0的高斯分布隨機(jī)變數(shù);n為路徑損耗因子。
RSSI測(cè)距模型如下:

式中:RSSI是接收信號(hào)強(qiáng)度指示;Psend是發(fā)射信號(hào)的功率;Pamplify是天線的增益。
將模型簡(jiǎn)化,可表示為:

式中:a=Psend+Pamplify-PL(d0)- Xδ,由(3)式知,RSSI與 10·lg(d)成線性關(guān)系。
1.2 校正傳輸參數(shù)
由于室內(nèi)定位存在許多干擾因素,如反射、多徑效應(yīng)、物體遮擋、氣候等,使定位難度十分大,如果直接采用上述 RSSI測(cè)距模型進(jìn)行定位,則難以達(dá)到室內(nèi)定位要求的定位精度。所以,校正當(dāng)前環(huán)境的傳輸參數(shù)是十分重要的[2]。
根據(jù)RSSI測(cè)距模型可以得到:

解方程組(4),可以得到路徑損耗因子n:

將n代入方程組(4)中,可以得到參數(shù)a:

2 算法說明
2.1 定位解算
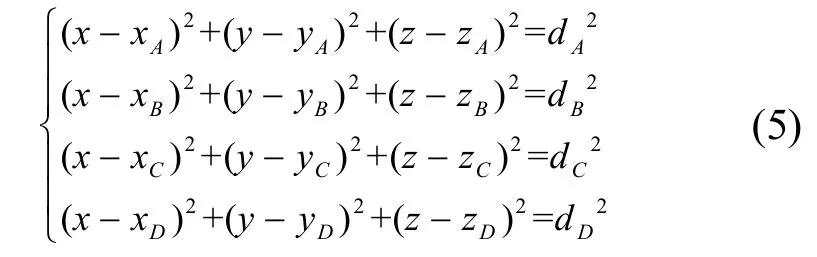
假設(shè) 4個(gè)參考點(diǎn)坐標(biāo)分別為A(xA,yA,zA),B(xB,yB,zB),C(xC,yC,zC),D(xD,yD,zD),未知節(jié)點(diǎn)的坐標(biāo)為M(x,y,z),節(jié)點(diǎn)M到A、B、C、D點(diǎn)的測(cè)量距離分別為dA,dB,dC,dD,根據(jù)三維空間計(jì)算公式,可以得到式(5)超定非線性方程組:對(duì)此超定非線性方程組,本文采用最小二乘法和牛頓迭代法進(jìn)行求解。
2.1.1 最小二乘法
將上述超定非線性方程組轉(zhuǎn)化為線性方程組形式AX=b,其中:

根據(jù)最小二乘法,當(dāng)矩陣AT A為非奇異矩陣時(shí),可求解出未知點(diǎn)M的最優(yōu)估計(jì)坐標(biāo)值[3]:

傳統(tǒng)的最小二乘法三維定位算法則是直接利用最小二乘法求解方程組進(jìn)行最終定位。當(dāng)前的大多數(shù)基于RSSI的三維定位算法也是利用最小二乘法解方程組的。
但是當(dāng)所有參考節(jié)點(diǎn)均分布于同一高度時(shí),rank(A)<3,最小二乘法將無法解出答案。
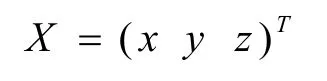
2.1.2 牛頓迭代法
將方程組(5)轉(zhuǎn)化成以下形式:
牛頓迭代法的迭代公式如下:

Xk為經(jīng)過迭代k次后,所得到的一組解。但是牛頓迭代法的收斂性依賴于初始值,選取不同的初始值可能會(huì)得到方程不同的根[4]。所以尋找一個(gè)好的初始值十分關(guān)鍵,這需要不斷的嘗試。
無論參考節(jié)點(diǎn)是否分布于同一高度,牛頓迭代法都可以得到一組近似解。但是參考節(jié)點(diǎn)不能放置于中間高度的同一水平面,必須放置于最底面或最高面。因?yàn)橥凰矫娴膮⒖脊?jié)點(diǎn)對(duì)于三維定位就已經(jīng)減小了參考作用,當(dāng)它們?cè)谥虚g高度的同一水平面時(shí),難以根據(jù)測(cè)量距離判斷未知節(jié)點(diǎn)是在此水平面的上方還是下方,易導(dǎo)致z軸方向定位誤差大。
2.2 改進(jìn)的三維修正定位算法
改進(jìn)的三維修正定位算法是在定位解算原理的基礎(chǔ)上,增加了修正傳輸參數(shù)、差分修正、迭代次數(shù)等環(huán)節(jié),對(duì)未知節(jié)點(diǎn)進(jìn)行進(jìn)一步的修正定位,減小室內(nèi)干擾因子的影響。
此定位算法中只需要A、B、C、D、E這5個(gè)已知相對(duì)坐標(biāo)的參考節(jié)點(diǎn)依次作為差分修正參考節(jié)點(diǎn),對(duì)未知節(jié)點(diǎn)M進(jìn)行定位[5]。具體步驟如下:
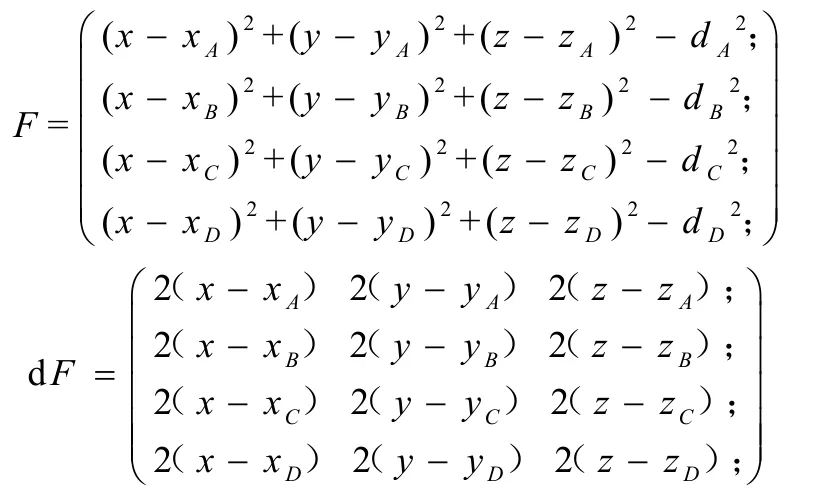
步驟一:參考節(jié)點(diǎn)A、B、C、D、E根據(jù)接收到其它參考節(jié)點(diǎn)的RSSI值,由公式(7)、(8)分別計(jì)算出自身作為差分修正參考節(jié)點(diǎn)時(shí)相對(duì)應(yīng)的校正參數(shù)a和n。
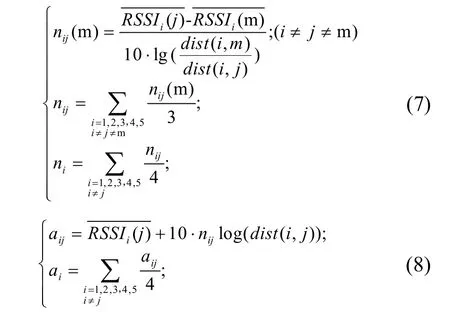
其中ni、ai分別表示第i個(gè)參考節(jié)點(diǎn)作為差分修正參考點(diǎn)時(shí)所對(duì)應(yīng)的路徑損耗因子及傳播參數(shù),j則表示第j個(gè)參考節(jié)點(diǎn)作為修正節(jié)點(diǎn),m則表示第m個(gè)參考節(jié)點(diǎn)作為輔助修正節(jié)點(diǎn),其中i,j,m= 1,2,3,4,5,且i≠j≠m;dist(i,j)表示參考節(jié)點(diǎn)i到j(luò)的距離;表示測(cè)量到的參考標(biāo)簽j到i的RSSI的平均值。
步驟二:B、C、D、E對(duì)差分修正參考節(jié)點(diǎn)A進(jìn)行初步定位,并得出偏移量(ΔxA,ΔyA, ΔzA)。
其中dAB,dAC,dAD,dAE分別表示A點(diǎn)到B、C、D、E的測(cè)量距離。可以利用最小二乘法或牛頓迭代法解此超定非線性方程組,得到 A定位坐標(biāo),然后與 A的實(shí)際坐標(biāo)相減,便可以得到偏移量(ΔxA,ΔyA,ΔzA):

步驟三:利用B、C、D、E參考節(jié)點(diǎn)對(duì)未知節(jié)點(diǎn)M進(jìn)行初步定位,得到。
其中dMB1,dMC1,dMD1,dME1分別表示M點(diǎn)到B、C、D、E的測(cè)量距離。根據(jù)方程組(11)可求解到修正參考坐標(biāo) (xMA1,yMA1,zMA1)。
同理,分別以B、C、D、E作為差分修正參考節(jié)點(diǎn)對(duì)M點(diǎn)定位,便可以得到節(jié)點(diǎn)M的修正參考坐 標(biāo)。差分修正的目的是對(duì)當(dāng)前環(huán)境下初步定位的進(jìn)一步修正。
步驟四:加入迭代次數(shù)r,求得各個(gè)差分修正參考節(jié)點(diǎn)的所對(duì)應(yīng)的r個(gè)修正坐標(biāo),然后分別取其均值:

迭代次數(shù)的應(yīng)用減小了個(gè)別誤差較大點(diǎn)對(duì)最終定位的影響力,有助于減小定位誤差。
步驟五:利用加權(quán)算法[6]計(jì)算出M點(diǎn)的最終定位坐標(biāo)(x,y,z),如下式所示:
將測(cè)量距離均值的倒數(shù)和作為權(quán)重,這更好地體現(xiàn)了各個(gè)差分參考節(jié)點(diǎn)對(duì)未知節(jié)點(diǎn)的定位影響力。
步驟六:利用公式(16),計(jì)算出定位誤差:

其中,(xM,yM,zM)為目標(biāo)點(diǎn)的實(shí)際坐標(biāo)。
3 仿真結(jié)果
仿真條件是在一個(gè)10m·10m·10m的三維區(qū)域內(nèi),放置5個(gè)參考節(jié)點(diǎn),其坐標(biāo)已知.未知目標(biāo)節(jié)點(diǎn)的坐標(biāo)由matlab隨機(jī)生成函數(shù)來生成,在該區(qū)域內(nèi)隨機(jī)分布,一共生成10個(gè)未知目標(biāo)節(jié)點(diǎn).然后根據(jù)RSSI值與距離的關(guān)系,由(1)、(2)、(3)式生成RSSI數(shù)據(jù),并在數(shù)據(jù)中添加均值為0,標(biāo)準(zhǔn)差δ為3的高斯噪聲,作為RSSI的隨機(jī)分量,以模擬實(shí)際環(huán)境中的反射、多徑效應(yīng)、物體遮擋、氣候等帶來的影響.路徑損耗因子n的初始值n0=4,傳播參數(shù)a的初始值a0=-46.當(dāng)參考節(jié)點(diǎn)分布在不同高度的情況下,分別對(duì)傳統(tǒng)最小二乘法定位算法和改進(jìn)定位算法進(jìn)行仿真;參考節(jié)點(diǎn)處于同一水平面時(shí),對(duì)使用牛頓迭代法的改進(jìn)算法進(jìn)行仿真.以下為參考節(jié)點(diǎn)的分布位置表及仿真結(jié)果。

表1 參考節(jié)點(diǎn)坐標(biāo)分布
從圖1,2,3可以看出,在參考節(jié)點(diǎn)處于不同高度的情況下,改進(jìn)后的三維定位算法的定位精度明顯比傳統(tǒng)算法的定位精度高。從表2可知,改進(jìn)后的三維定位算法的平均定位誤差為0.3873 m,比傳統(tǒng)算法的平均定位誤差1.2691 m小.仿真結(jié)果綜合說明改進(jìn)算法的定位精度有明顯提高.但是當(dāng)參考節(jié)點(diǎn)處于同一高度時(shí),改進(jìn)的定位算法的定位誤差仍較大,定位誤差接近1 m。
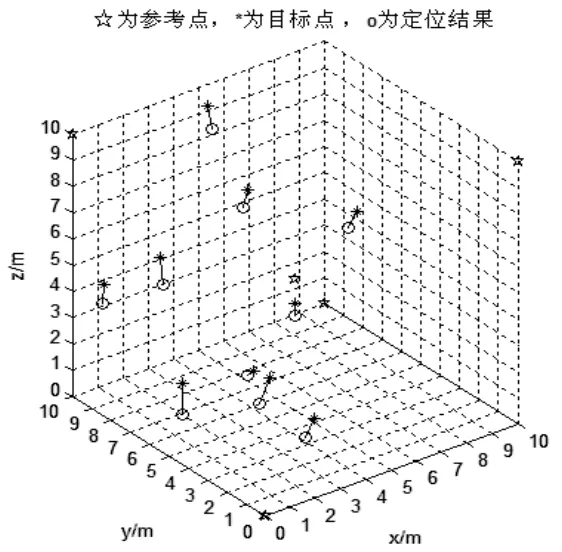
圖1 傳統(tǒng)三維定位效果圖
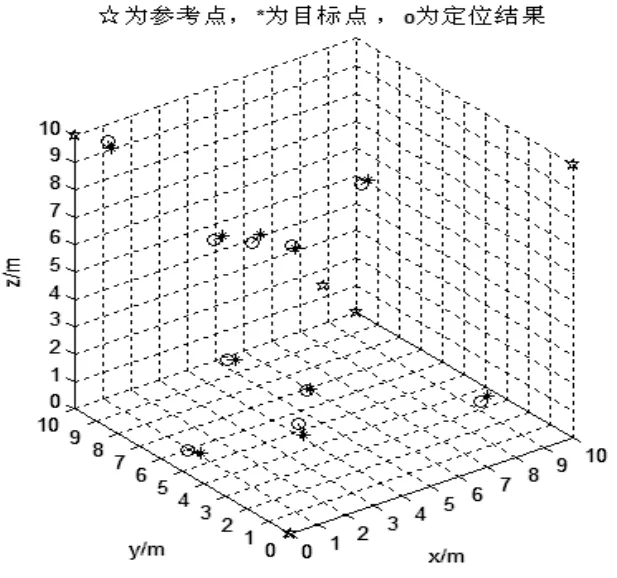
圖2 改進(jìn)算法的三維定位效果圖
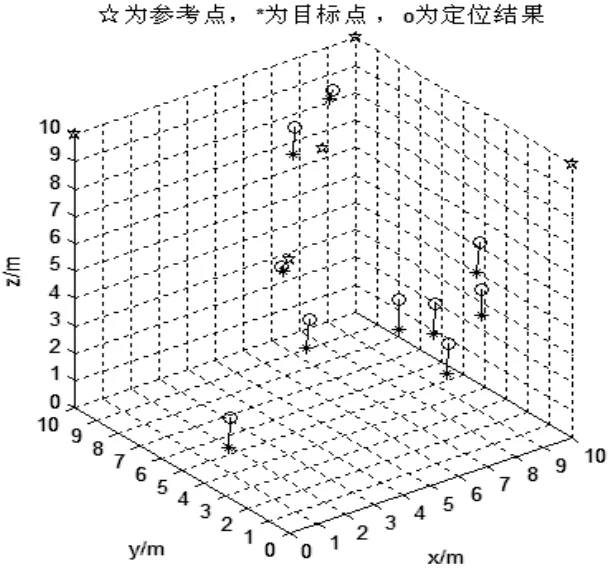
圖3 同一高度的改進(jìn)算法三維定位效果圖
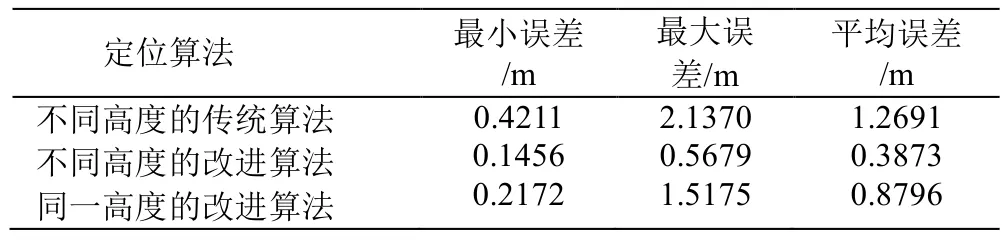
表2 定位誤差比較
4 結(jié)論與展望
該算法在不增加額外參考節(jié)點(diǎn)數(shù)量的情況下,利用參考節(jié)點(diǎn)對(duì)當(dāng)前環(huán)境的傳播參數(shù)進(jìn)行了初步校正,同時(shí)也加入了差分修正、迭代次數(shù)和加權(quán)算法等環(huán)節(jié),對(duì)定位坐標(biāo)進(jìn)行進(jìn)一步修正,大大提高了定位精度。但是在實(shí)際應(yīng)用中,參考節(jié)點(diǎn)應(yīng)均放置于最頂層,這樣減小了多徑作用和遮擋物的影響,通過仿真結(jié)果可知,定位誤差較大,還有較大的改進(jìn)空間。
