旋轉(zhuǎn)倒立擺的顯式模型預(yù)測(cè)控制
2021-03-15 06:43:56馬永凌
中國(guó)管理信息化 2021年5期
關(guān)鍵詞:仿真
馬永凌
[摘? ? 要] 基于拉格朗日方程對(duì)旋轉(zhuǎn)倒立擺在不穩(wěn)定平衡點(diǎn)上進(jìn)行了線性化的數(shù)學(xué)建模。在多參數(shù)二次規(guī)劃方法的基礎(chǔ)上,建立了顯示模型預(yù)測(cè)的控制系統(tǒng),且在旋轉(zhuǎn)倒立擺系統(tǒng)應(yīng)用上做了研究。最后通過(guò)Matlab進(jìn)行仿真,結(jié)果表明:EMPC方法對(duì)于旋轉(zhuǎn)倒立擺的平衡控制效果良好。
[關(guān)鍵詞] 旋轉(zhuǎn)倒立擺;建模;多參數(shù)二次規(guī)劃;顯式模型預(yù)測(cè)控制;仿真
0? ? ? 引? ? 言
旋轉(zhuǎn)倒立擺是一個(gè)結(jié)構(gòu)不復(fù)雜、成本不高、體積不大的實(shí)驗(yàn)設(shè)備,但卻是一個(gè)非線性、強(qiáng)耦合、多變量的自然不穩(wěn)定被控制對(duì)象,被廣泛應(yīng)用于控制理論的研究,是個(gè)理想的研究平臺(tái)。
模型預(yù)測(cè)控制(MPC)技術(shù)是一種處理多變量約束系統(tǒng)最優(yōu)控制問(wèn)題的最有效方法之一。但由于模型預(yù)測(cè)控制需要實(shí)時(shí)的在線優(yōu)化,因此只能應(yīng)用于慢速過(guò)程,不適用于旋轉(zhuǎn)倒立擺系統(tǒng)。為此本文研究顯式模型預(yù)測(cè)控制(EMPC)控制器,將在線的優(yōu)化求解計(jì)算放到離線進(jìn)行,從而提高在線計(jì)算的速度,完成對(duì)旋轉(zhuǎn)倒立擺的平衡點(diǎn)控制,并用Matlab進(jìn)行仿真。
1? ? ? 旋轉(zhuǎn)倒立擺系統(tǒng)數(shù)學(xué)模型的建立
如圖1為旋轉(zhuǎn)倒立擺的模型結(jié)構(gòu),擺桿由于重力作用,在垂直方向上會(huì)自然地?cái)[到垂直向下的位置,為自然不穩(wěn)定的被控制對(duì)象。本研究的控制目的為通過(guò)電機(jī)使旋臂轉(zhuǎn)動(dòng),并且通過(guò)旋臂的轉(zhuǎn)動(dòng)帶動(dòng)擺桿,使擺桿能夠保持在垂直向上的不穩(wěn)定的平衡點(diǎn)位置上。
在不考慮各種摩擦力與阻力的前提下,可以把擺桿與旋臂都抽象為勻質(zhì)桿,其中擺桿的長(zhǎng)度為L(zhǎng),相對(duì)于其垂直向上的方向零位的角位移為θ;旋臂的長(zhǎng)度為R,相對(duì)于其水平方向上的方向零度的角位移為α。
旋轉(zhuǎn)倒立擺的模型總是具有一定的非線性和時(shí)變性,模型的結(jié)構(gòu)與參數(shù)總是具有一定的攝動(dòng)特性,以及模型總是存在一些外部的干擾,本研究的控制方案就是在此線性化后的狀態(tài)空間模型上進(jìn)行的。
2? ? ? 顯式模型預(yù)測(cè)控制
MPC為Model Predictive Control的縮寫,又稱模型預(yù)測(cè)控制。MPC模型預(yù)測(cè)控制的基本運(yùn)行機(jī)理為:
①預(yù)測(cè)系統(tǒng)未來(lái)動(dòng)態(tài)求解。
②優(yōu)化路徑問(wèn)題。
③解得的第一個(gè)元素直接作用于系統(tǒng)。
④滾動(dòng)時(shí)域、重復(fù)進(jìn)行。
在MPC模型預(yù)測(cè)控制中存在反復(fù)在線優(yōu)化的模塊,使得模型預(yù)測(cè)控制普遍只適用于慢速過(guò)程,很難適用于動(dòng)態(tài)變化較快的旋轉(zhuǎn)倒立擺控制。然而Bemporad等人在2002年提出來(lái)的EMPC是一種面向小規(guī)模控制命題的快速M(fèi)PC算法[3-5]。
EMPC為Explicit Model Predictive Control的縮寫,又稱顯式模型預(yù)測(cè)控制。
EMPC顯式模型預(yù)測(cè)控制的主要思想是通過(guò)多參數(shù)二次規(guī)劃的思想,將在線的優(yōu)化求解計(jì)算放到離線進(jìn)行,從而提高在線計(jì)算的速度,使得顯式模型預(yù)測(cè)控制能夠適用于動(dòng)態(tài)變化較快的旋轉(zhuǎn)倒立擺控制。
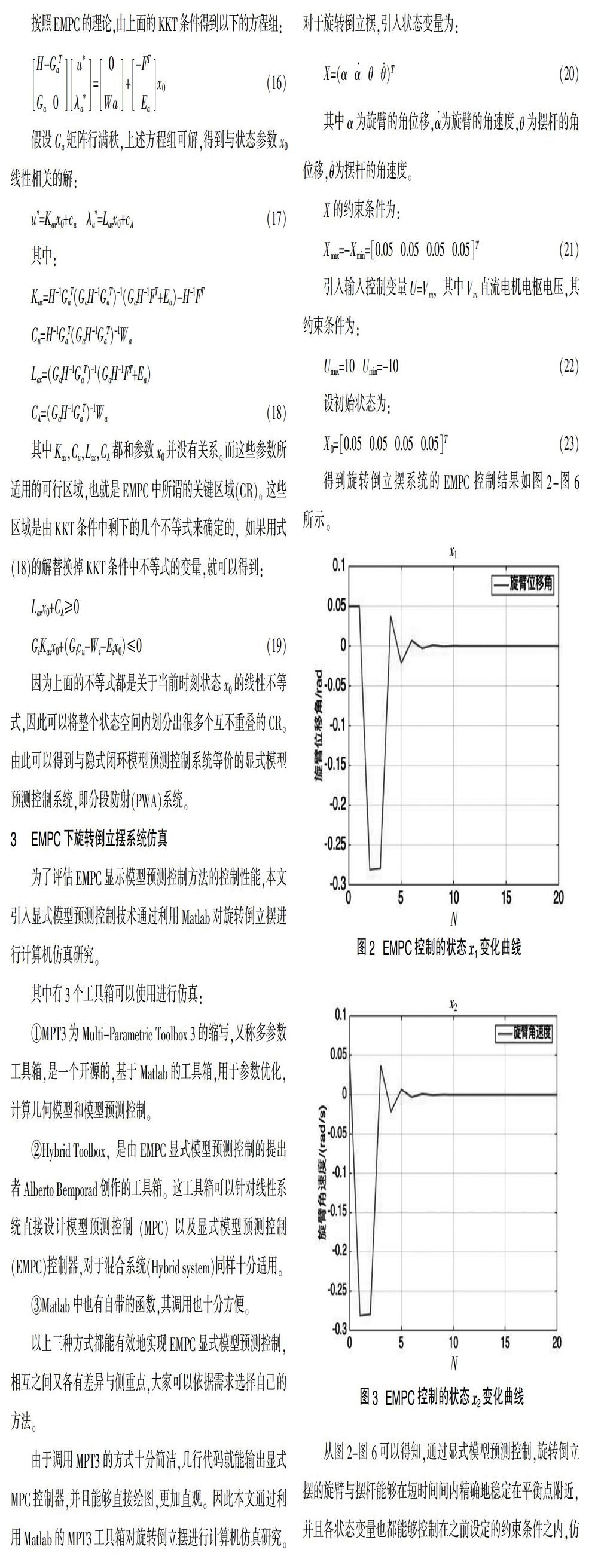
因?yàn)樯厦娴牟坏仁蕉际顷P(guān)于當(dāng)前時(shí)刻狀態(tài)x0的線性不等式,因此可以將整個(gè)狀態(tài)空間內(nèi)劃分出很多個(gè)互不重疊的CR。由此可以得到與隱式閉環(huán)模型預(yù)測(cè)控制系統(tǒng)等價(jià)的顯式模型預(yù)測(cè)控制系統(tǒng),即分段防射(PWA)系統(tǒng)。
3? ? ? EMPC下旋轉(zhuǎn)倒立擺系統(tǒng)仿真
為了評(píng)估EMPC顯示模型預(yù)測(cè)控制方法的控制性能,本文引入顯式模型預(yù)測(cè)控制技術(shù)通過(guò)利用Matlab對(duì)旋轉(zhuǎn)倒立擺進(jìn)行計(jì)算機(jī)仿真研究。
其中有3個(gè)工具箱可以使用進(jìn)行仿真:
①M(fèi)PT3 為Multi-Parametric Toolbox 3的縮寫,又稱多參數(shù)工具箱,是一個(gè)開源的,基于Matlab的工具箱,用于參數(shù)優(yōu)化,計(jì)算幾何模型和模型預(yù)測(cè)控制。
②Hybrid Toolbox,是由EMPC顯式模型預(yù)測(cè)控制的提出者Alberto Bemporad創(chuàng)作的工具箱。這工具箱可以針對(duì)線性系統(tǒng)直接設(shè)計(jì)模型預(yù)測(cè)控制(MPC)以及顯式模型預(yù)測(cè)控制(EMPC)控制器,對(duì)于混合系統(tǒng)(Hybrid system)同樣十分適用。
③Matlab中也有自帶的函數(shù),其調(diào)用也十分方便。
以上三種方式都能有效地實(shí)現(xiàn)EMPC顯式模型預(yù)測(cè)控制,相互之間又各有差異與側(cè)重點(diǎn),大家可以依據(jù)需求選擇自己的方法。
由于調(diào)用MPT3的方式十分簡(jiǎn)潔,幾行代碼就能輸出顯式MPC控制器,并且能夠直接繪圖,更加直觀。因此本文通過(guò)利用Matlab的MPT3工具箱對(duì)旋轉(zhuǎn)倒立擺進(jìn)行計(jì)算機(jī)仿真研究。
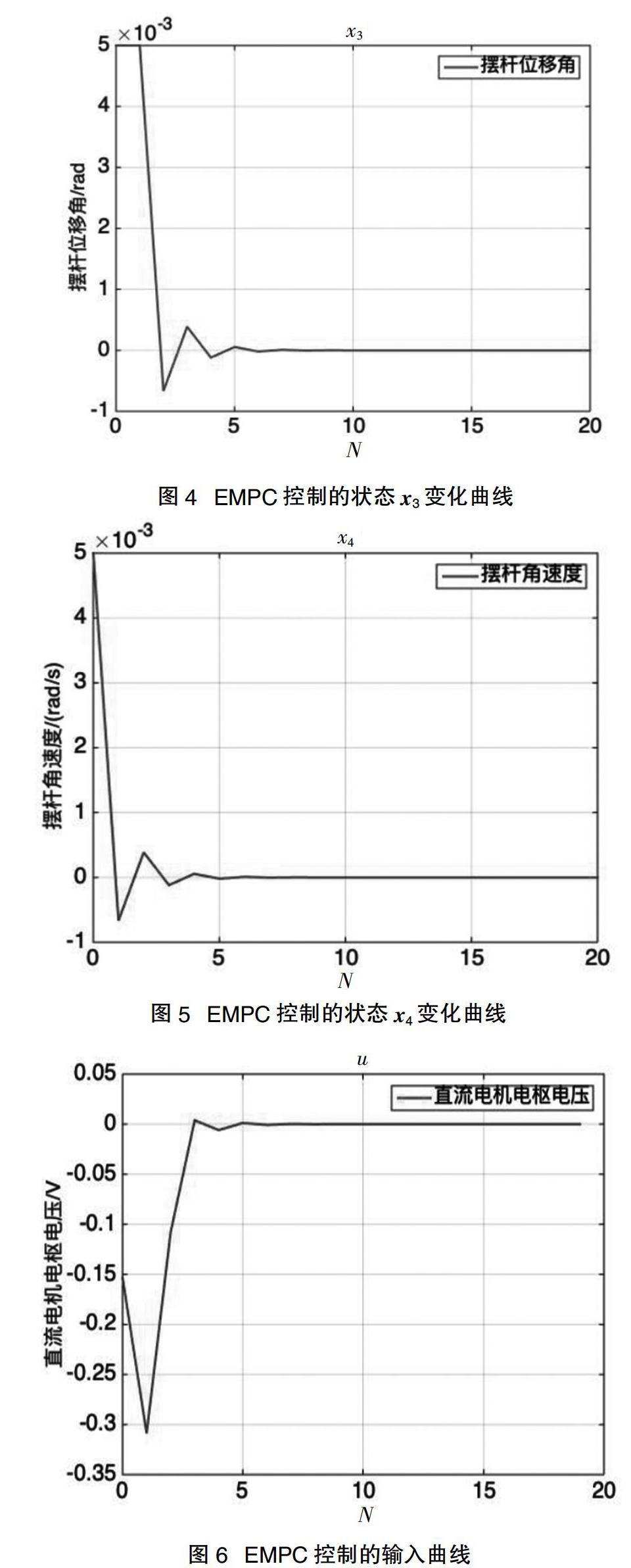
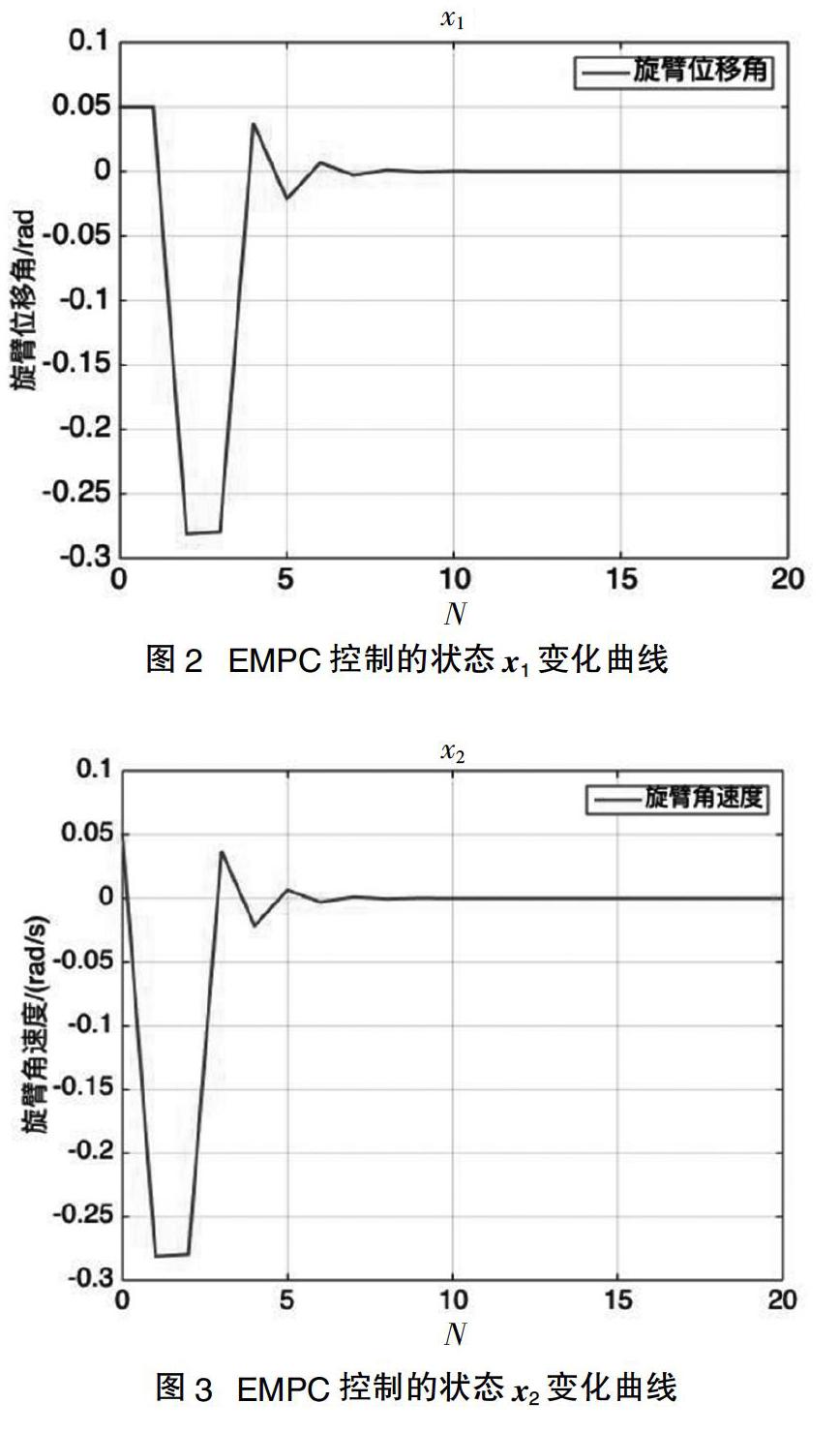
得到旋轉(zhuǎn)倒立擺系統(tǒng)的EMPC控制結(jié)果如圖2-圖6所示。
從圖2-圖6可以得知,通過(guò)顯式模型預(yù)測(cè)控制,旋轉(zhuǎn)倒立擺的旋臂與擺桿能夠在短時(shí)間間內(nèi)精確地穩(wěn)定在平衡點(diǎn)附近,并且各狀態(tài)變量也都能夠控制在之前設(shè)定的約束條件之內(nèi),仿真符合預(yù)期。
通過(guò)仿真研究能夠發(fā)現(xiàn):①顯式模型預(yù)測(cè)控制的耗時(shí)更少;②顯式模型預(yù)測(cè)控制精確性更高;③顯式模型預(yù)測(cè)控制對(duì)于有約束系統(tǒng)的控制更有效,并且不難發(fā)現(xiàn)通過(guò)顯式模型預(yù)測(cè)控制能夠把狀態(tài)變量與輸入變量的變化控制在預(yù)設(shè)的約束范圍之內(nèi)。
但是EMPC顯式模型預(yù)測(cè)控制也有它的局限性,實(shí)際應(yīng)用過(guò)程中EMPC顯式模型預(yù)測(cè)控制還是有它自身的限制的,最大的短處就是求得的控制率函數(shù)比較復(fù)雜,而且函數(shù)的復(fù)雜度隨著參數(shù)的增多(比如預(yù)測(cè)步長(zhǎng)的增大)呈指數(shù)增長(zhǎng),這樣仿真計(jì)算的時(shí)間會(huì)越來(lái)越長(zhǎng),系統(tǒng)所需要的存儲(chǔ)空間會(huì)越來(lái)越大,所以一般EMPC也僅適用于小規(guī)模的問(wèn)題,如旋轉(zhuǎn)倒立擺系統(tǒng)。如果要縮小EMPC顯式模型預(yù)測(cè)控制的運(yùn)算時(shí)間或者系統(tǒng)儲(chǔ)存空間,就不得不要放棄一部分的準(zhǔn)確度。
4? ? ? 結(jié)? ? 語(yǔ)
本文首先基于拉格朗日方程對(duì)旋轉(zhuǎn)倒立擺在不穩(wěn)定平衡點(diǎn)上擺進(jìn)行了線性化的數(shù)學(xué)建模。然后對(duì)于EMPC顯式模型預(yù)測(cè)控制的控制原理進(jìn)行了分析推理。通過(guò)EMPC顯式模型預(yù)測(cè)控制的控制使擺桿能夠保持在垂直向上的不穩(wěn)定的平衡點(diǎn)位置上,從仿真結(jié)果來(lái)看效果不錯(cuò)。顯式模型預(yù)測(cè)控制(EMPC)作為模型預(yù)測(cè)控制(MPC)的一個(gè)重要分支,從被提出至今已經(jīng)有將近20年的歷史了。簡(jiǎn)單來(lái)說(shuō),顯式模型預(yù)測(cè)控制就是在傳統(tǒng)的模型預(yù)測(cè)控制基礎(chǔ)上,將原本需要在線(on-line)優(yōu)化求解的控制量轉(zhuǎn)化成離線(off-line)模式。換句話說(shuō),將控制量表示為一個(gè)關(guān)于狀態(tài)量x_0的函數(shù),而且這函數(shù)是piecewise-affine(PWA分段仿射)函數(shù)。但關(guān)于EMPC顯式模型預(yù)測(cè)控制方法改進(jìn)的研究還是一件任重而道遠(yuǎn)的事。要在系統(tǒng)存儲(chǔ)量要求高、運(yùn)算耗時(shí)量大與控制精確度中做出取舍,使之達(dá)到最優(yōu)的控制效果。
主要參考文獻(xiàn)
[1]白井良明.機(jī)器人工程學(xué)[M] . 王棣堂,譯. 北京: 科學(xué)出版社, 2001.
[2]吳愛國(guó),張小明,張釗. 基于Lagrange方程建模的單級(jí)旋轉(zhuǎn)倒立擺控制[J]. 中國(guó)工程科學(xué), 2005,7(10):11-15.
[3]Bemporad A., Morari M., Dua V.,et al.The Explicit Linear Quadratic Regulator for Constrained Systems[J]. Automatica,2002,38(1):3-20.
[4]Ferreau H. J.,Bock H. G.,Diehl M. An Online Active Set Strategy to Overcome the Limitations of Explicit MPC[J].International Journal of Robust and Nonlinear Control,2008,18(8):816-830.
[5]Pannocchia G., Rawlings J. B.,Wright S. J. Fast,Large-scale Model Predictive Control by Partial Enumeration[J]. Automatica,2007,43(5):852-860.
猜你喜歡
中國(guó)教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價(jià)值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49