4-PSPP六自由度并聯機構的位置正反解
2021-03-16 09:39:24馮鑫
科技創新導報 2021年28期
馮鑫


摘要:針對求解傳統并聯機構位置正反解困難的問題,對一種新型4-PSPP并聯機構,本文利用方向余弦陣法進行位置正反解。通過構建并聯機構動平臺的方向余弦陣,添加約束條件,得到解析解,并求得所有從動副的運動參數。利用MATLAB求解得到工作空間,圖像結果顯示符合給定的運動范圍要求。該機構正解和反解的結果唯一,方便后續進行控制,具有良好的應用價值。
關鍵詞:方向余弦陣法 ?位置正反解 ?六自由度并聯機構 ?工作空間
Abstract: In view of the difficulty of solving the forward and inverse position solution of the traditional parallel mechanism, this paper uses the directional cosine matrix method to solve the forward and inverse position solution of a new 4-PSPP parallel mechanism. By constructing the directional cosine matrix of the parallel mechanism platform, adding constraints, the analytical solution is obtained, and the motion parameters of all driven pairs are obtained. The workspace is solved by MATLAB, and the image results show that it meets the requirements of the given motion range. The results of the forward and inverse solutions of the mechanism are unique, which is convenient for subsequent control and has good application value.
Key Words: Directional cosine matrix; Positive and negative position solutions; 6-DOF parallel mechanism; Working space
并聯機構結構穩定、承載能力大[1],有著廣泛的應用價值。周毅鈞[2]對并聯機構進行了工作空間和運動特性分析;米文博[3]用SolidWorks和Matlab聯合仿真求出了并聯機構的工作空間;朱旭彪[4]對2-PRU-UPR并聯機構進行運動學分析及優化;申軍偉[5]針對2自由度并聯機構提出了一種新的軌跡規劃方法;蘆風林[6]設計了無耦合的并聯機構,并進行了運動學分析。
為了探究輸入件與輸出件的幾何關系,需要進行位置分析。與串聯機構相比,并聯機構結構更復雜,所以其位置分析要復雜很多。下面分別求解4-PSPP并聯機構的位置正反解。
1 構型描述及符號說明
圖1為該并聯機構的結構簡圖。如圖1所示,機構的固定平臺和動平臺的球鉸點皆按四邊形分布。首先,分別在機構固定平臺和動平臺中心建立一個坐標系(右手坐標系)。設四根絲杠A1B1、A2B2、A3B3和A4B4的長度為L1、L2、L3和L4,固定平臺的外接圓半徑為R。
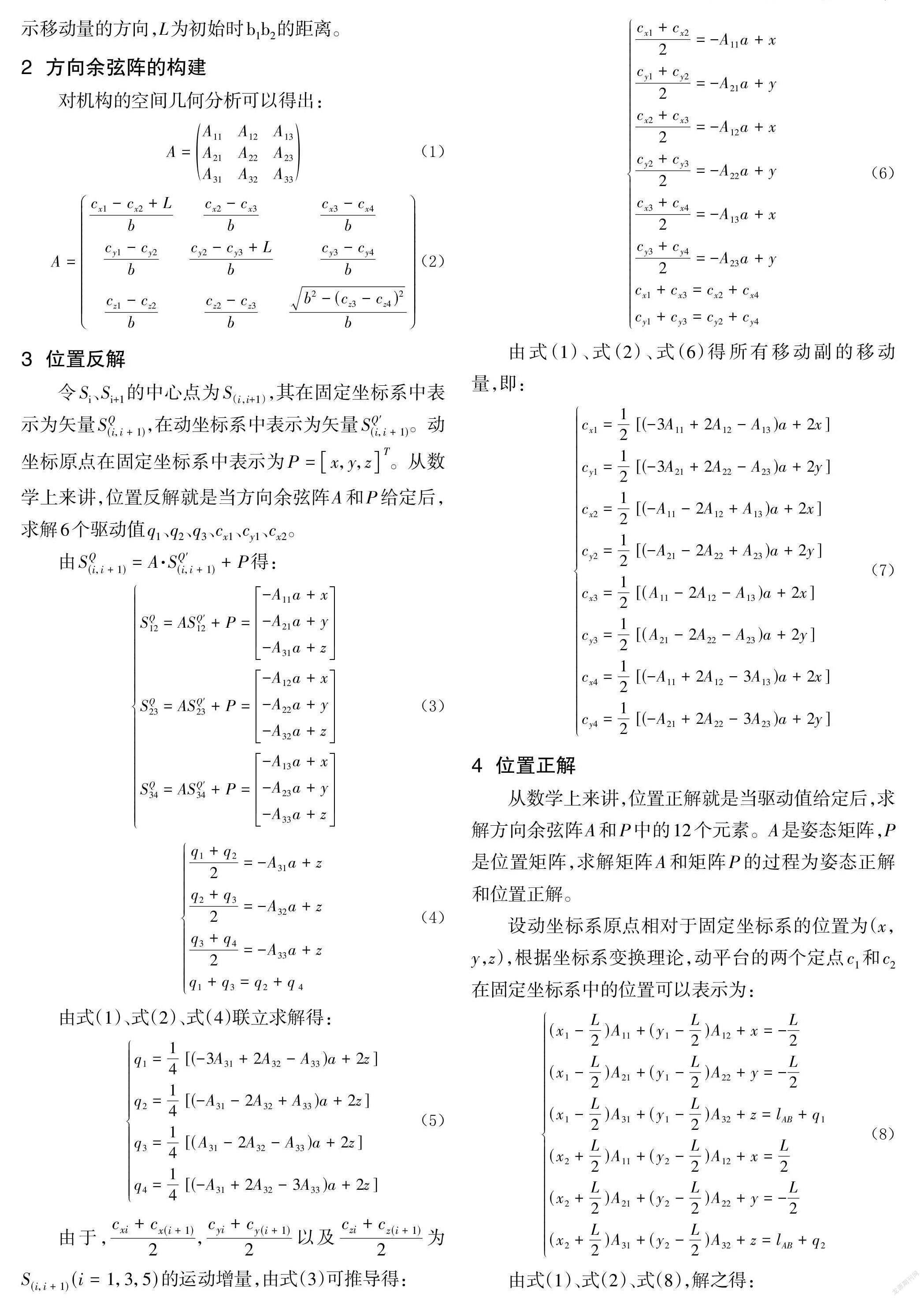
為了后面方便進行公式推導,設支鏈上的移動副的位移量為qi。所有的移動副以沿著坐標軸正向的方向為正,反之為負。以圖1機構的位置為初始位置,位移量均為零。設兩球鉸的距離為b,坐標原點離兩球鉸中心連線的距離為a,用cxi,cyi,czi表示位移量,x,y,z表示移動量的方向,L初始時b1b2的距離。
2 方向余弦陣的構建
對機構的空間幾何分析可以得出:
5 結語
(1)使用方向余弦陣可以很方便的進行機構位置反解,可以求出所有運動副的位移量,有助于機構設計工作。
(2)4-PSPP型并聯機構結構較為簡單,位置正解和位置反解的結果都只有一個,給定驅動后運動確定,具有良好的應用價值。
參考文獻
[1]文杰,馬春生,劉建國,等.基于2-RCU/CUR并聯機構的運動學分析[J/OL].包裝工程:1-8[2021-11-04].
[2]周毅鈞,陳業富,蘇榮海.2RPU/2SPS并聯機構工作空間及運動學分析[J].機床與液壓,2020,48(21):26-30.
[3]米文博,馬春生,李瑞琴,等.應用于藥品包裝生產線的2-UPR/RSPR并聯機構的工作空間分析[J].包裝工程,2021,42(03):171-176.
[4]朱旭彪.2-PRU-UPR并聯機構運動學分析與優化設計[D].杭州:浙江理工大學,2018.
[5]申軍偉,程珩.2自由度并聯機構的運動軌跡規劃優化[J].機械傳動,2021,45(7):110-115.
[6]蘆風林,張彥斌,王科明,等.新型無耦合兩移動并聯機構的設計與運動學分析[J].機械傳動,2021,45(8):63-69.
3273500589229
