三維激光多普勒測振儀研究
2021-03-16 10:08:18浙大寧波理工學院朱磊磊
電子世界 2021年4期
浙大寧波理工學院 朱磊磊
寧波財經學院 上海大學 馬 勰
浙大寧波理工學院 馬修水 于凱東
余姚舜宇智能光學技術有限公司 宋云峰
激光測振儀具有非接觸測量,時間與空間分辨率高等優點,廣泛應用于微機電系統(MEMS)、機床、汽車等行業振動測量。本文綜述了三維激光多普勒測振儀國內外研究成果及應用,簡要分析其存在的問題及發展趨勢。
傳統的振動測量大多是接觸式測量,其缺點是有附加質量以及質量載荷引起的誤差,特別是對于輕型或者小型結構的測試對象,可能會改變輕和柔性材料結構的固有頻率,此外,有些材料對電磁干擾靈敏,也對振動測量產生影響,對于測量大面積物體時,需要放置較多的測振儀。非接觸式測量以單點式振動測量儀為主,隨著校準技術的發展,三維激光多普勒測振儀應用越來越廣泛,由于其測量準確性、自動化程度越來越高,能夠配合工業機器人進行自動化測試,與單點測振儀在三個位置測量相比,使用三維測振儀測量具有整體的測量結構,信號處理更加方便。
本文綜述了三維激光多普勒測振儀的原理與發展,重點介紹國內外具有代表性企業的產品,對其發展趨勢進行展望。
1 原理
三維激光多普勒測振儀測振原理如圖1所示,主要包括三組正交分布的單點式測振單元、控制箱以及信號處理部分。常用的激光是波長為632.8nm的He-Ne激光,測振單元發出的激光光束經過透鏡聚焦于某一物點,測振單元內部有高精度的干涉儀,被測物體表面點上的散射光束回到測振單元形成干涉,通過控制器解調出各個測振單元相應的光束投影分量,再將投影分量數據進行三維變換分解,將分解后的數據通過空間矢量算法將物點三分量多普勒頻移信號轉換為對應的三分量物體振動速度與位移信息,最后得到被測點的三維振動信息。

圖1 三維激光多普勒測振儀測振原理
2 研發現狀
2.1 Polytec公司產品
德國Polytec公司利用激光多普勒干涉技術測量振動,其三維測振儀主要由光學部分(掃描頭),電子部分(前端)和控制部分(數據管理系統)構成。掃描頭內部包含高精度干涉儀、一對將激光束偏轉到需要測試位置高速搖擺鏡和用于可視化測量的高清彩色攝像機。代表性產品有PSV-500-3D三維掃描式激光測振儀和MSA-100-3D顯微式測振儀。
PSV-500-3D-M是Polytec公司推出的全球第一款全數字式全場三維掃描激光測振儀,適用于高頻振動測量,擁有完整的全場振動測量系統,具有模塊化的特點。該產品優化了相干技術,使設備在測量范圍內頻率呈高穩定性,解決了三束光的串擾問題。該產品主要特點有:(1)交互式設置可以通過導入文件來獲取被測物體的形貌數據,能直接在視頻圖像中定義需要的內容;(2)在快速掃描的過程中保持最佳聚焦狀態,并且保持最佳信噪比;(3)可輸出需要的內容圖片、圖形和動畫;(4)信號處理器可以對測試結果進行大量的統計計算;(5)采用高精度掃描頭和激光三角法進行精確定位,掃描角度達到50°×40°。圖2為三維掃描激光多普勒測振儀。

圖2 三維掃描激光多普勒測振儀
為了進行小面積的測量,Polytec公司研發了MSA-100-3D顯微式激光多普勒測振儀,可以進行微機電傳感器和執行器的振動測量,激光光斑小于4μm,測試距離大,可達38mm,能與常規的MEMS商用探針測試臺兼容。
2.2 舜宇集團有限公司產品
舜宇集團光學科技公司2018年生產了國內首臺跨尺度三維光電振動測量儀3DLVS-B,可同時測量X、Y、Z三個方向的振動,配置專用軟件,可實現三維數據同步輸出,實現超寬頻帶振動測量,可以選擇適當的量程和頻率范圍來達到用戶的要求。
三維光纖測振儀3DLVS-F是3DLVS-B的升級版,與3DLVS-B相比,體積更加的小巧,模塊化設計使得測振儀便于拆裝。在控制箱中有高精密的紅外激光干涉儀,可結合掃描功能進行三維掃描測量。
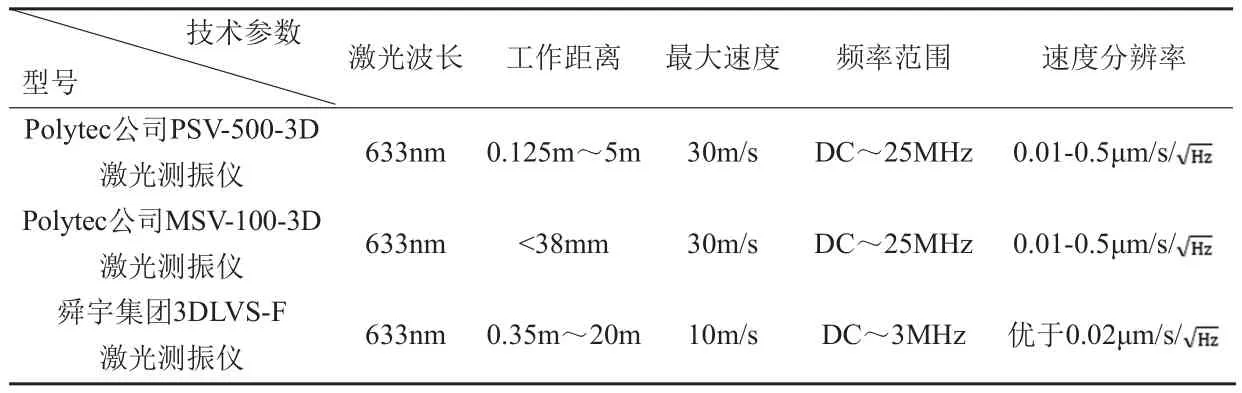
表1 三維激光多普勒測振儀的技術參數對比表
公司研發的三維掃描式激光測振儀LV-SC300-3D,含高精密激光干涉儀,360倍(30倍光學變焦,12倍數字變焦)彩色高清攝像頭,掃描點數可高達512×512。
表1為德國polytec公司和舜宇集團有限公司生產的三維激光多普勒測振儀的技術參數對比。由表1可見,在相同頻率范圍內,國內測量速度指標與國外還有較大差距。
2.3 應用現狀
利用三維激光測振儀對整車制動器在特定的情況下的振型進行監測。其中,三維激光多普勒測振儀捕捉采集噪音的振型,利用有限元模型進行分析,最后得到降低制動器噪音的解決方法。
利用三維掃描激光測振儀測量風機葉片的三維位移,以此來計算風機葉片的動態應力應變分布,優化傳統結構設計,提高動載荷作用下構件的耐久性,再利用有限元模型進行數值模擬,與實際測量數據比較驗證,實現在低頻和高頻下精確測量法向應變和剪切應變。
利用三維激光多普勒測振儀組成的系統測量人顱骨的三維表面,在表面設置了200個點的振動頻率響應。研究得到在各種刺激模式下,不同的頻率對于顱骨的不同位置產生的影響是不同的,低頻的顱骨運動取決于刺激部位。
3 存在問題與發展趨勢
3.1 存在問題
激光多普勒測振儀在應用方面存在以下問題:
(1)用戶交互改善。有些設備含有大量的用戶交互,需要手動進行儀器定位等,耗時長,且導致同一物體測量數據的不確定性,需要自動校準程序和建立3D模型,配合攝像機實時與樣本進行比對,實現設備測量與模型自動映射。
(2)基于表面效應的聚焦方法改進。目前激光多普勒測振儀大多具備高靈敏度的光學頭,能夠適應部分惡劣環境,但對于一些低反射率的物體,反射光可能會消失或不足以到達接收鏡頭,需要涂反射材料提高反射性能。
(3)測量精度有待提高。多普勒頻移可能會影響測量精度,接收器接收到的多普勒信號存在信號增寬,也就是多普勒頻譜增寬等問題,其原因可能是測量儀器離被測對象太遠,測量時間太長,以至于攜帶振動信息反射光有時間差;此外由于參考光的存在,導致探測器孔徑增大,會影響測量精度。
(4)誤差溯源及修正技術需加強。測量點并不能一直都精確地滿足要求,激光束不是完全正交,由此引入的誤差,過程的非平穩性帶來的誤差以及被測對象位置的不確定性引起的誤差,大部分與位置相關,此外還有安裝誤差,需研究誤差溯源、建模及修正技術。
(5)三維姿態成像定位優化。三維激光多普勒測振儀與掃描式激光測振儀兩者應用場景有很多類似,因此有成像定位的需求,現階段國內外的激光測振儀的發展已有成像,但是成像的像素不是很高,定位還需要優化,有待進一步的研究。
3.2 發展趨勢
經過多年的發展,國內激光多普勒測振的研發已經有較大的發展,但是與國外的先進水平相比還有一定的差距,其技術發展趨勢如下。
(1)優化功能設置。不同的用戶需要的數據結果各不相同,輸出的結果以用戶需求為導向是發展的方向,現在國外儀器已能輸出圖片、動畫等,國內的情況相對比較單調,需要豐富用戶優化交互設置。
(2)提高環境適應能力。目前設備適應環境的溫度在3℃到45℃之間,更惡劣的環境下無法測量。因此改善設備的環境適應能力是激光測振儀未來研發的方向。
(3)噪聲與數據處理。噪聲是真實信息以外測量所得的值,如熱噪聲,散粒噪聲等,由于光量子性的特點,相同的測量時間內進入探測器的光子數有差異,形成散粒噪聲,當光電轉換時,量子起伏也會形成散粒噪聲;此外,還有低頻噪聲等。降低噪聲是提高測量精度的關鍵。
(4)儀器移動穩定性。因為儀器位置會影響測量的穩定性,所以固定儀器以及靈活移動儀器時,測量穩定性成為一個特別重要的因素。現在雖然已經有便攜式激光多普勒測振儀,但是測量精度不高。在測量大尺寸的物件時,儀器的移動不可避免,因此,研究儀器移動的穩定性是熱點和難點問題。
總結:三維激光多普勒測振儀是一種適合多種場合振動測量的儀器,在航空航天、生物醫學、車輛安全、軍工產品檢測等方面發揮重要作用。本文綜述了三維激光多普勒測振儀產品研發以及應用現狀及發展趨勢。目前,我國的三維激光多普勒測振儀的發展與國外差距正在縮小,相關研究還需要進一步突破優化功能設置、提高測量速度、提高測量精度及定位精度等關鍵技術,推動三維激光多普勒測振儀向儀器整體化、模塊化、多樣化方向發展。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21