巡檢無人機電池應急充電裝置設計
2021-03-16 10:08:36國網安徽省電力有限公司檢修分公司焦玉平吳曉春
電子世界 2021年4期
國網安徽省電力有限公司檢修分公司 萬 能 汪 曉 寧 彥 焦玉平 吳曉春
巡檢無人機的應用解放了大量的巡檢人員,使巡檢工作人員無需進入危險區域,保障了巡檢人員的生命安全,又提高了巡檢效率和巡檢的準確率,但是巡檢無人機普遍存在工作時間短、充電時間長的問題。為解決巡檢無人機續航能力不足的問題,設計了巡檢無人機電池應急充電裝置。首先設計出巡檢無人機電池應急充電裝置的基本構架,完善AC/DC整流模塊、AC/DC逆流模塊、AC/DC充電模塊之間能量相互轉換的方式,以實現充電和放電的目的。根據以上構架詳細設計巡檢無人機電池應急充電裝置的AC/DC整流和AC/DC逆變裝置。設計對比實驗,驗證使用備用電池方式做應急充電設備的巡檢無人機電池應急充電裝置能夠達到設計目的,確實節省了巡檢時間,提高了巡檢效率。
在工業與人口規模都在不斷擴張的現代社會,無論是生活還是工業對于電量的需求都在不斷增加,因此電網的規模也在迅速增長。傳統的電網巡檢采用人工方法,不但費時費力,還存在較高的錯誤率。因此在無人機技術能夠應用于實際之后,巡檢機器人被正式應用于電網巡檢領域。電力公司采用巡檢無人機進行電網巡檢工作,不但能夠迅速反應,節約人力物力,還能夠不受干擾不怕危險地進入危險區域,不受到地形限制。但是由于高強度的作業,巡檢無人機通常具備續航能力不足的隱患,一般的巡檢無人機都只能一次性工作25-30min,一次充電滿需要4-6h,完全無法承擔繁重的電網巡檢工作,通常只被用于重點區域的巡檢。為了能夠使巡檢無人機滿足電網巡檢工作的需求,有一些電力公司在巡檢無人機巡視電網的路途中設置了一種充電樁,并在巡檢無人機的機身上安裝接口與控制程序,使巡檢無人機能夠在電力不足時自動對準充電樁充電。但是這種自動充電的方式只是縮短了巡檢無人機返回出發點充電的路途,仍然需要巡檢無人機停下來補充電力,因此本文設計了一個能夠使巡檢無人機在行動過程中給電池應急充電的裝置。首先需要進行巡檢無人機電池應急充電裝置基本構架的設計,搭建巡檢無人機電池應急充電裝置的基本機構,建立AC/DC整流模塊、AC/DC逆流模塊、AC/DC充電模塊、APP外接設備智能充電模塊,并設置充電和放電的基本方式。然后再分別具體設計AC/DC整流裝置和AC/DC逆變裝置,以此確定電壓的輸出范圍以及增強電源的安全性和可靠性。最后設計仿真實驗,將使用充電樁作為應急設備的巡檢無人機電池應急充電裝置與使用備用電池作為應急設備的巡檢無人機電池應急充電裝置進行對比,通過巡檢時間的比較,確定本文設計的裝置確實能夠達到設計目的。
1 巡檢無人機電池應急充電裝置基本構架研究
巡檢無人機電池應急充電裝置主要在于在巡檢無人機上安裝一個備用電池,在巡檢無人機主電池中的電量沒有耗盡時,備用電池的開關處于斷開狀態,只有當主電池中的電量耗盡后,備用電池才會在智能系統的管理下打開開關,與巡檢無人機相連接。因此在巡檢無人機的電池應急充電裝置中,最核心的系統就是應急充電電源管理系統。該系統的結構組成如圖1所示。
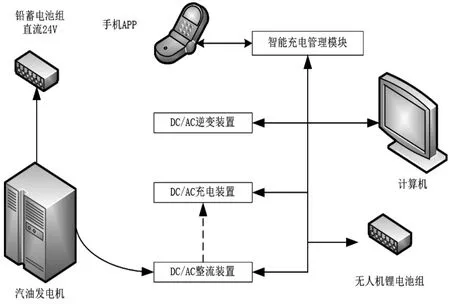
圖1 應急充電電源管理系統結構
如圖1所示,巡檢無人機的電池應急充電裝置主要由發電機、電能接收器、AC/DC整流模塊、AC/DC逆流模塊、AC/DC充電模塊、APP外接設備智能充電模塊以及巡檢無人機備用電池組成。在日常的電網檢修或巡查過程中,往往沒有大量的時間耗費在充電上,因此當巡檢無人機中有備用電池可以一邊行進一邊充電時,就會非常方便。該系統的主要構架設計是將AC/DC整流模塊、AC/DC逆流模塊、AC/DC充電模塊中的能量相互轉換,以完成充電和放電的目的。
2 巡檢無人機電池應急充電裝置組成結構設計
2.1 AC/DC整流裝置設計
在充電過程中,需要將巡檢無人機的備用電池額外取出,固定在充電場所中,利用汽油發電機和AC/DC整流裝置,將原本汽油發電機中產出的220V電壓整流為24V的安全電壓,輸入進巡檢無人機的備用電池中。備用電池一般使用鋰電池組或鉛酸蓄電池組,將充入的電量儲存在電池中,為向外輸電做出準備。整流裝置的控制部分主要分為兩個部分,其前級交錯為并聯的PFV控制芯片技術,主要應用于電壓電流的保護與控制,后級全橋則是應用于輸出電壓的范圍調節。
2.2 AC/DC逆變裝置設計
在放電的過程中,既可以將巡檢無人機停下,也可以在巡檢無人機行進巡檢的過程中持續放電。將已經充電完畢的備用電池所儲存的24V直流電通過AC/DC充電模塊輸入進巡檢無人機中,達成巡檢無人機電池應急充電的目的。也可以通過AC/DC逆流裝置,將已經儲存在巡檢無人機備用電池中的24V電壓逆轉為220V電壓,與跟隨巡檢無人機同時前進的外設計算機相連,給筆記本電腦或平板電腦等設備充入220V電壓。逆變裝置的主電路采用前后隔離的技術手段,前路為升壓電路,將電壓升高到一定范圍之后,再實現前后電路之間的隔離。后級電路為全橋逆變電路,一般應用于增強電源的安全可靠性能。
3 對比實驗
在本文設計的備用電池應急充電方式之前,還有一種應急充電方式,即充電樁應急充電方式。充電樁應急充電主要是在巡檢無人機的必經之路上提前設置若干充電樁,在巡檢無人機電量不足時,無需返回出發點的主控機房進行充電,而是可以直接使用分布在道路兩旁的充電樁進行應急充電,這樣既可以省略往返的時間,又能夠省略巡檢無人機在路上所需的電量。但是即使是這樣,對于耗電量極高,充電時間極長的巡檢無人機來說也無法大幅度地提高巡檢效率,因此上文中設計了一種理論上能夠極大地增加巡檢效率的應急充電裝置。為了確保上文設計的應急充電裝置確實較充電樁應急充電方式在巡檢過程中所需時間更少,設計以下實驗。
3.1 實驗準備工作
本實驗因場地問題只能在計算機中使用仿真軟件進行仿真實驗,需要提供以下的實驗環境,如表1所示。

表1 實驗仿真環境
本實驗采用Flexsim作為仿真軟件,通過Flexsim能夠直接構建一個關于離散時間系統的仿真模型,以達到測算兩種應急充電裝置巡檢時間的目的。首先需要規劃電池電量的參數。設電池充電時間為100min,使用備用電池應急充電裝置的巡檢無人機中除主電池外還需配備兩個備用電源,設每臺電池從開始工作到電量耗盡需30min,一個電池的電量耗盡后,就會開啟另一個備用電池的電源,兩個備用電池的電量同樣可以支持巡檢無人機運行30min。如此一來,一臺巡檢無人機從開始運行到結束就能夠連續運行1h30min。而使用充電樁應急充電裝置進行應急充電的巡檢無人機中,只配備一臺主電池,則該類型的巡檢無人機只能運行30min。然后需要規劃巡檢路線,在這條巡檢路線上共有20個距離不一的虛擬電站,將各電站按順序變為1-20號,設巡檢無人機在電站中巡檢所用的時間為5-7min不等,整條巡檢路線的總長度需要巡檢無人機行走90min,在巡檢路線上設置若干充電樁,尋找充電樁需要1-3min不等,在本實驗中會以隨機數的形式存在。
3.2 實驗結果分析
運行Flexsim程序,將得到的數據統計分析,得到如表2所示的實驗結果。
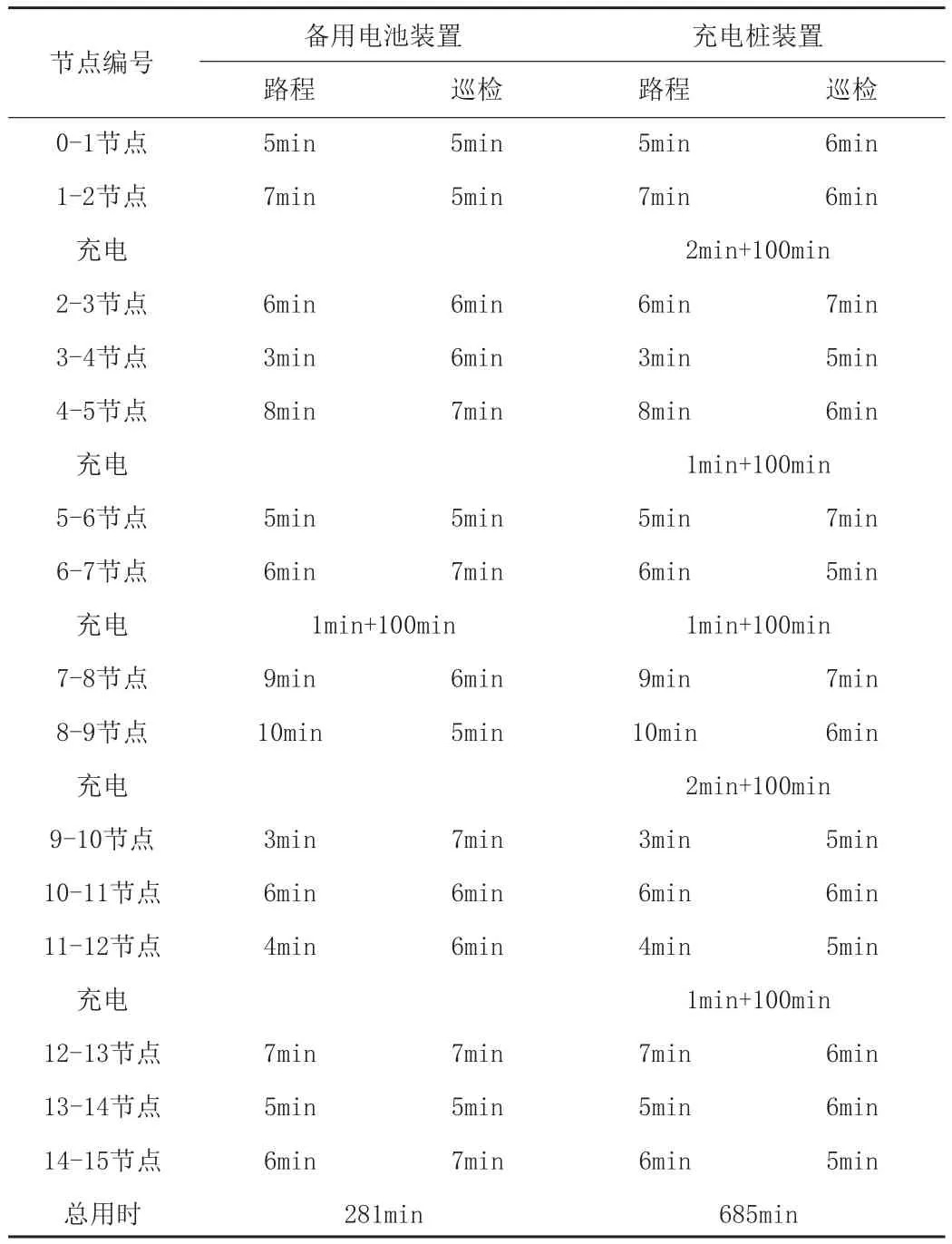
表2 實驗結果
如表2所示,在同樣90min的巡檢路線下,因為抽取隨機數的差異,使用備用電池裝置進行應急充電的巡檢無人機在巡檢過程中用時90min,使用充電樁裝置進行應急充電的巡檢無人機在巡檢過程中用時88min,兩者在整條巡檢路線上的用時只有2min的差距。但是使用充電樁裝置進行應急充電的巡檢無人機在最終的總用時比較中約為使用備用電池裝置進行應急充電的巡檢無人機的2.4倍,傳統的充電樁裝置在巡檢過程中所用的時間遠遠高于本文設計的裝置,這些多出的時間全部都是在進行充電。因此可以判斷,本文設計的使用備用電池裝置進行應急充電的巡檢無人機能夠極大限度地縮短巡檢無人機的充電時間,實現了設計的目的。
結束語:本文主要針對在用電量急劇增加的前提下,為了保障電網中巡檢工作的順利實施,使巡檢人員無需進入危險區域,為了提高巡檢的效率和準確率,放棄了以往的充電樁應急充電方式,改用備用電池的方式進行應急充電。設計了巡檢無人機電池應急充電裝置的基本構架,并詳細規劃了AC/DC整流裝置和AC/DC逆變裝置的結構設計。通過設計的對比實驗可以明確,傳統的充電樁應急充電方式,在巡檢的效率上遠不及本文設計的備用電池充電方式。且充電樁的應急充電過程中需要將插頭與電源相對接,在這個過程中總是會出現對接不上的問題,導致無法及時充電。因此在日后的巡檢無人機應急充電時,可以直接使用更具備實行性的備用電池充電方式。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55