雙三相永磁直線同步電機的推力波動及抑制
2021-03-16 08:36:06盧琴芬李焱鑫
電工技術學報 2021年5期
蔣 錢 盧琴芬 李焱鑫
(浙江大學電氣工程學院 杭州 310027)
0 引言
隨著稀土永磁材料和交流伺服控制技術的不斷發展,永磁直線同步電機(Permanent Magnet Synchronous Linear Motor, PMLSM)吸引了學術界和工業界越來越多的目光。PMLSM具有高推力、高速度、高效率、高加速度與高精度等優點,已成功應用于高檔數控機床、半導體加工設備與高速物流等行業[1-3]。
雙三相電機與三相電機相比,降低了電源的要求,可以采用更低電壓標準的功率器件,系統的容錯性好;磁動勢及反電動勢(Electromotive Force,EMF)波形大大改善;電機推力波動明顯降低。因此研究雙三相永磁直線同步電機非常重要[4-6]。然而,在直線電機中存在著由鐵心不連續結構引起的邊端效應和繞組開斷引起的各相互感不對稱等現象,因此在推力中存在特定頻率的推力波動,降低了推力的平穩性[7-9]。
針對直線電機的鐵心開斷和繞組結構不對稱特性,已有一部分學者對其進行了研究[10-20]。文獻[10]分析了定子中不對稱阻抗矩陣的表達式。文獻[11]中通過減小品質因數的方法降低縱向邊端效應的影響,但同時也會降低電機的性能。文獻[12]采用定子、動子極距不等的方法來降低推力波動,推導出動子極距的公式。文獻[13]基于磁場的分布,通過對氣隙磁場的特性分析,從而對電感參數的變化規律進行解析的計算推導。文獻[14]分析了邊端效應對電機電磁推力中不同頻率脈動的影響。文獻[15]提出一種新型繞組,通過改變通電段極數,改善其互感的不對稱程度。文獻[16]指出繞線式動子可直接控制動子電流,通過控制動子電流對稱,可抑制動子阻抗不對稱產生的邊端效應。文獻[17-18]指出通過換位的方法,將三臺電機的相序改變,從而產生三相的對稱負載,消除三相電流中的不對稱成分。文獻[19]分析了由于繞組磁動勢諧波分量與邊端效應影響,導致兩相圓筒直線電機的實際電感與理想電感之間存在差異。文獻[20]使用遺忘因子遞歸最小二乘算法在線辨識電機的等效d、q軸電感,補償邊端效應的影響。
本文首先對推力波動進行分析,推力波動主要分為空載和負載推力波動。其中空載推力波動主要可分為端部力和齒槽力。齒槽力是由于定子開槽引起的;端部力是由于初級鐵心開斷引起,通過優化端部齒的尺寸,可以改善。文中比較了優化前后電機空載反電動勢的對稱性和電磁性能。負載推力波動是由各相電感不平衡導致,而電感數值大小和匝數有關,所以本文提出不等匝數的繞組結構,通過改變每相繞組匝數,提高電感的對稱度,從而降低電機的推力波動。最后,通過施加三相對稱電壓源的有限元仿真計算和樣機測試驗證了模型的準確性。
1 電機結構與邊端效應
雙三相永磁直線電機(Dual Three Phase Permanent Magnet Linear Synchronous Machine,DTP-PMLSM)結構示意圖如圖1所示,具體參數見表 1。其定子鐵心由硅鋼片疊壓而成,定子繞組為兩套相差 30°電角度的三相雙層集中繞組,分別為A1、B1、C1和 A2、B2、C2,其中A1相繞組和A2相繞組相差30°電角度。動子由背鐵和永磁體構成。當電樞繞組接入三相對稱電源時,便產生電樞磁場,同時永磁體也會產生勵磁磁場,二者相互作用產生推力。

圖1 雙三相永磁直線電機結構示意圖Fig.1 Structure diagram of the DTP-PMLSM
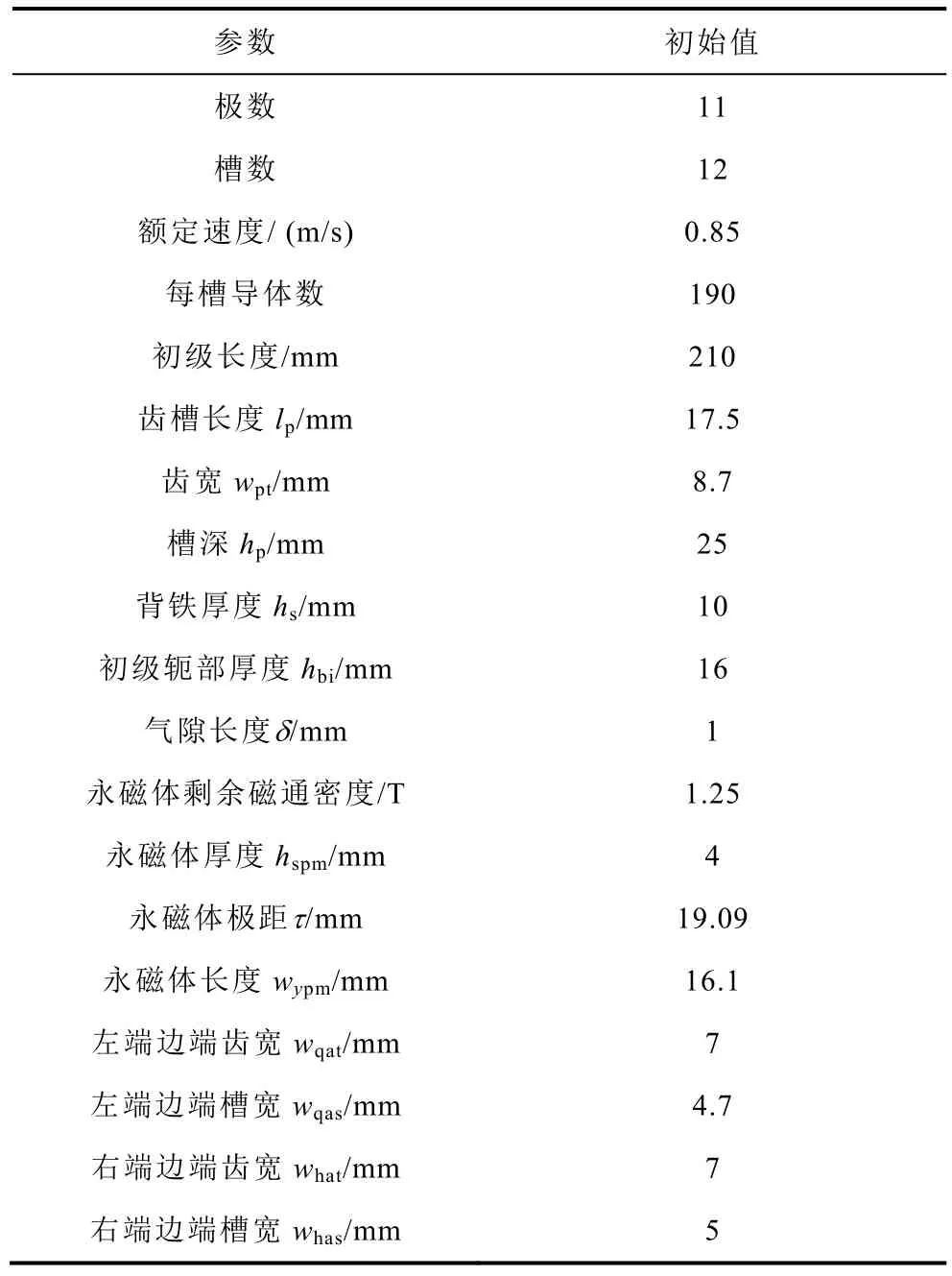
表1 雙三相電機結構參數Tab.1 Structure parameters of DTP-PMLSM
在不考慮外界干擾因素和安裝摩擦力的情況下,由于直線式結構引起的推力波動主要有兩個分量:空載推力波動和負載推力波動。其中空載推力波動分為端部力、齒槽力和空間諧波引起的推力波動。端部力是由于動子鐵心開斷形成的端部對磁極產生的鐵磁吸力;齒槽力是由于定子開槽部位對磁極產生的鐵磁吸力。這兩個力都是關于動子位置的函數,是在沒有電樞電流時求得,其中齒槽力和空間諧波引起的推力波動幅值大小只有不到端部力幅值大小的10%,本文忽略;而負載情況增加了電樞電流,此時增加的負載推力波動主要是由于電樞電流不平衡、電樞電流的諧波成分、電樞電壓不平衡、電樞電壓的諧波成分等引起,前者是主要因素,其是由繞組空間位置不對稱引起的電感不對稱所產生。因此,動子鐵心開斷形成的邊端效應與由繞組空間位置不對稱引起的電感不對稱是推力波動的主要分量。
2 端部優化
2.1 不等尺寸的邊端齒優化
邊端效應主要與端部齒的磁路有關系,雖然改變電機的端部齒寬來降低推力波動是傳統的優化方法,但是在工程中也是最容易實現的。然而本文通過研究空載反電動勢的對稱性來顯示出邊端效應對推力波動的影響。由于左端邊端齒和右端邊端齒相對永磁體的位置不同,因此采用的不等尺寸邊端齒優化能夠更好地削弱推力波動。
采用有限元計算,優化圖1所標識的初級左端邊端齒寬wqat和右端邊端齒寬what,得到對應的推力波動大小Trip如圖2所示。圖2中,Trip為推力波動峰峰值與平均推力的比值,其中常規結構的左右兩邊端齒寬相等。
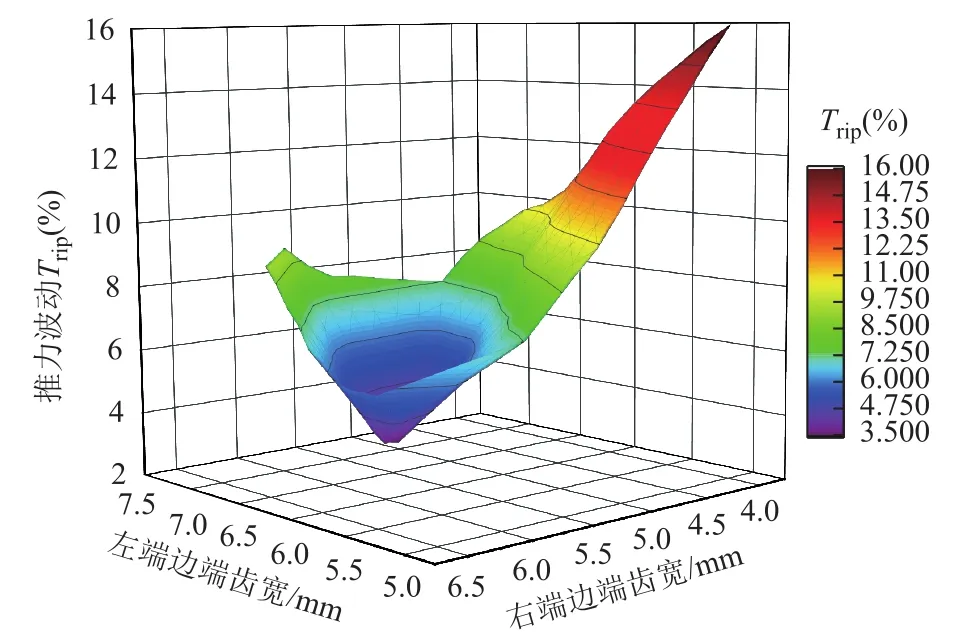
圖2 邊端齒優化Fig.2 Optimization of the auxiliary teeth
當左端邊端齒寬和右端邊端齒分別為6.4mm和6.3mm時,電機推力波動Trip最小為3.51%。優化前的推力波動Trip為5.6%,相對下降37.3%。優化前后的推力曲線如圖3所示,優化前推力頻譜分析結果如圖 4所示。可以看到,其主要的諧波為 2、4、6、8…次諧波。各主要諧波中2次最大,通過優化邊端齒之后,大大地削弱了2次諧波幅值。
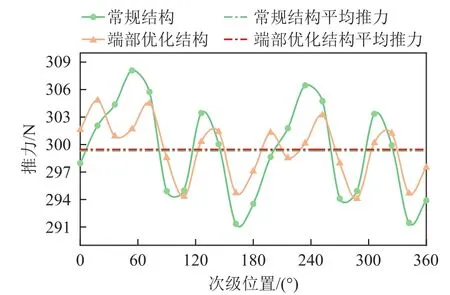
圖3 優化前后推力波形Fig.3 Waveforms of the thrust force after optimization
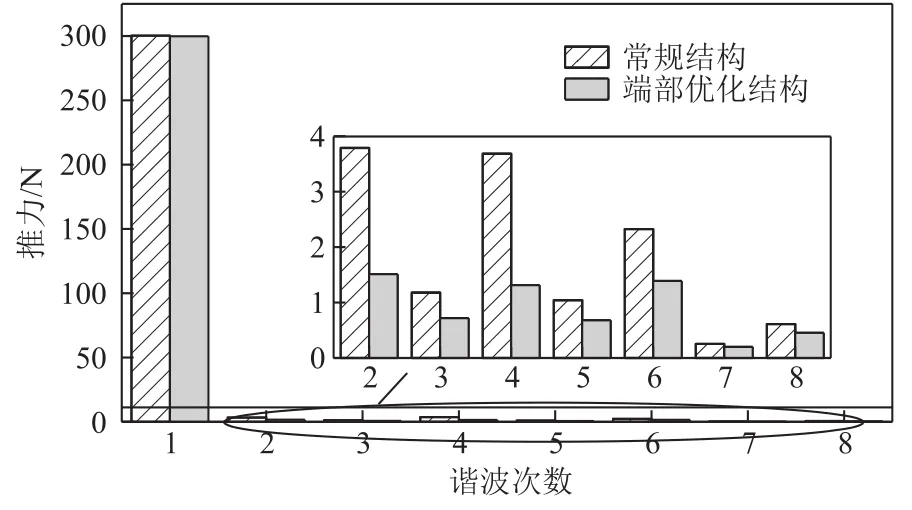
圖4 優化前后推力頻譜分析Fig.4 Spectra of the thrust force after optimization
2.2 空載反電動勢的影響
電機的電樞壓降主要包括三部分:電阻壓降、電抗壓降和空載反電動勢。其中空載反電動勢的不平衡會直接影響電機的性能,可以通過優化電機的邊端齒尺寸改善磁路,從而降低反電動勢的不對稱程度。
在邊端齒優化的參數中,選擇10個推力波動逐漸減小的點,如圖5的雷達圖所示。隨著電機推力波動逐漸減小,能清晰直觀地看出A1、C2相電壓幅值逐漸增加,其余四相電壓幅值基本影響不大。當左端邊端齒寬和右端幅值齒寬為最優值 6.4mm和6.3mm時,如圖6所示,六相電壓逐漸趨于平衡,彼此間幅值差距不超過0.1V。
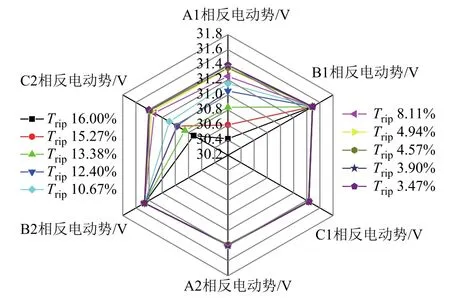
圖5 反電動勢隨著推力波動示意圖Fig.5 Back-EMF variation with the thrust ripple
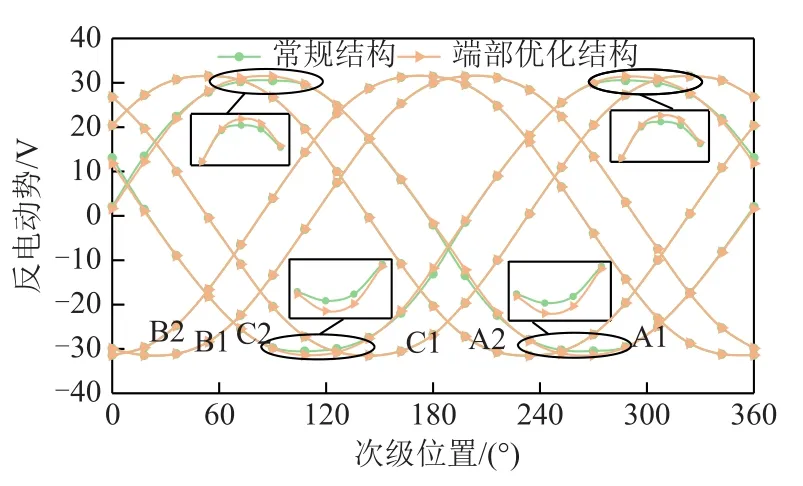
圖6 優化前后反電動勢波形示意圖Fig.6 Back-EMFs after optimization
2.3 電樞電流的影響
由于本文主要討論的是直線電機的不對稱問題,故施加三相對稱電壓作為激勵,就能考慮電樞電流諧波對電機性能的影響。當該雙三相永磁直線電機施加三相對稱電壓時,端部齒優化前后 A1相的電樞電流波形如圖7所示,其中A1代表常規結構的A1相電流,A1'代表端部優化結構的A1相電流。
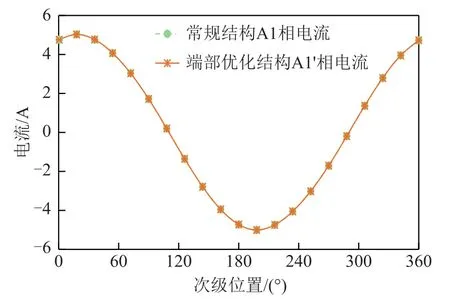
圖7 優化前后電流波形Fig.7 Waveforms of the current after optimization
從圖7中發現優化前后,電樞電流的正弦性都較好。為了進一步分析電流諧波含量,將其進行頻譜分析,結果如圖8所示,優化后的基波分量略微增大,諧波的幅值都有一定的削弱。
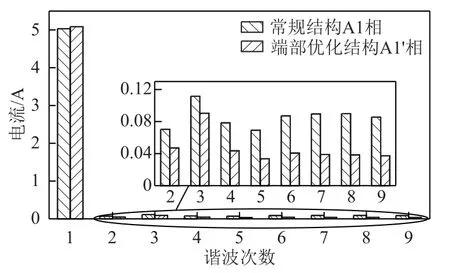
圖8 優化前后電流頻譜分析Fig.8 Spectra of the thrust force after optimization
2.4 電感的影響
對于雙三相永磁直線電機來說,端部磁路同樣影響電機的自感和互感。在磁路不飽和情況下,電機的自感主要與繞組匝數和磁阻有關,即

式中,NS、iS、ΛS、RS分別為繞組匝數、電樞電流、磁導和磁阻。由式(1)可知,自感與繞組匝數二次方成正比,與磁阻成反比。由于直線電機鐵心不連續,磁路路徑不同從而導致直線電機端部位置磁阻與正常磁槽位置不一樣,從而導致每相電感不平衡。
優化前后自感曲線如圖9所示,其中LA1A1代表常規結構的A1相自感,LA1′A1′代表端部優化結構的A1相自感,A1和Al′繞組在電機的左端部位置,C2和 C2'繞組在電機的右端部位置,因此 A1、A1′、C2、C2'和其他四相自感不一樣。C2和 A1的電感約為30.9mH左右,其余四相的自感約為29.6mH。在優化端部邊端齒尺寸后,A1和C2相自感的幅值大小無明顯變化。

圖9 優化前后自感曲線Fig.9 Waveforms of the self-inductances after optimization
電機自感的不對稱主要是由于每相磁阻不對稱造成的,然而互感不對稱因素是繞組的空間位置排布不一樣。優化前后互感曲線如圖10所示。由圖10可知,在Y軸正上方的是 A1A2、B1B2、C1C2和A1'A2'、B1'B2'、C1'C2'之間的互感,B1B2 和 B1'B2'之間的互感略大于 A1A2、C1C2、A1'A2'、C1'C2'之間的互感,然而A1A2、C1C2和A1'A2'、C1'C2'互感差不多相等。在Y軸負方向下方的四個電感值相等,都是非端部繞組之間的互感,平順性也比較好,所以端部位置繞組A1、C2相耦合的互感與兩個中間位置相耦合的互感不一樣,造成了互感之間的不對稱。
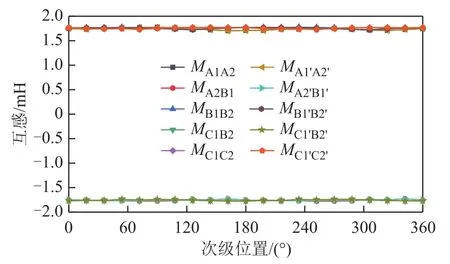
圖10 優化前后互感曲線Fig.10 Waveforms of the mutual-inductances after optimization
綜合分析,互感數值大小為 1.70~1.76mH,自感約為 29.6~30.9mH,兩者數值相差甚遠,自感的不對稱性可能對電機性能影響更大。
3 繞組優化
由圖 9可得,雙三相電機中,每相的自感LC2C2=LA1A1>LA2A2=LB1B1=LB2B2=LC1C1。 在 電 機不飽和情況下,自感的大小和繞組匝數二次方成正比,所以可以通過調整繞組匝數來抑制電感的不對稱性。在結構上,A1相與C2相位于兩端端部,因此改變這兩相繞組的匝數,就能夠使這兩者電感與其余四相趨于平衡,稱為不等匝數結構。改變繞組匝數固然也會使與A1、C2耦合的相互感減小,然而互感的數值遠小于自感,所以A1、C2匝數的稍微改變對互感的影響可以忽略不計。
理論上來講,雙三相電機中六相繞組都可以改變匝數,達到最優的匝數值,然而六個參數的計算比較復雜,所以要考慮減少參數。由繞組結構分析可得最需要調整的是兩端相自感,即A1和C2相。由圖1電機模型可以看出,B1和B2相在電機的中間位置,保持190匝不變,先考慮優化A1、A2、C1和 C2相的繞組匝數。取得最優值,再去調校 B1和B2相的繞組匝數,分組優化繞組匝數,降低計算難度。
通過有限元計算,A1、A2、C1、C2相匝數的優化結果如圖11所示,當A1、A2、C1、C2相線圈匝數分別等于188、189、186和187時,電機的推力波動最小,然后再去調校B1、B2相的繞組匝數。同樣,B1、B2相匝數的優化結果如圖12所示,當B1、B2相繞組匝數分別等于190和188,此時電機的推力波動為 2.43%,電機推力為 304.4N。因此,通過端部優化與采用不等匝數繞組結構,該直線電機的推力波動明顯下降。
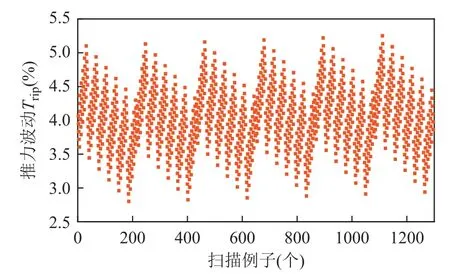
圖11 A1、A2、C1、C2相繞組匝數優化推力波動Fig.11 Thrust force ripple variation with the optimization of the phase A1、A2、C1、C2

圖12 B1和B2相繞組匝數優化推力波動Fig.12 Thrust force ripple variation with the optimization of the phase B1 and B2
4 不等匝數結構電磁性能
4.1 繞組電感的對稱性
根據有限元模型,通過磁鏈和電流可以計算得到上述優化方案的自感和互感,如圖13和圖14所示。圖中的A1'是端部優化結構的A1相,A1"是不等匝數結構的A1相。由圖13可得,將A1"和C2"相的繞組匝數設置為不相等之后,其電感值都趨于29.6mH,其中 B2"和 C1"自感減小,由于其繞組匝數減少導致,同樣的在圖14中LC1′C2′和LB2′C′之間的互感減小,也是繞組匝數減少導致。
根據上面計算出的自感互感,觀察電感的平衡程度。此處定義一個電感不平衡系數kL,表達式為
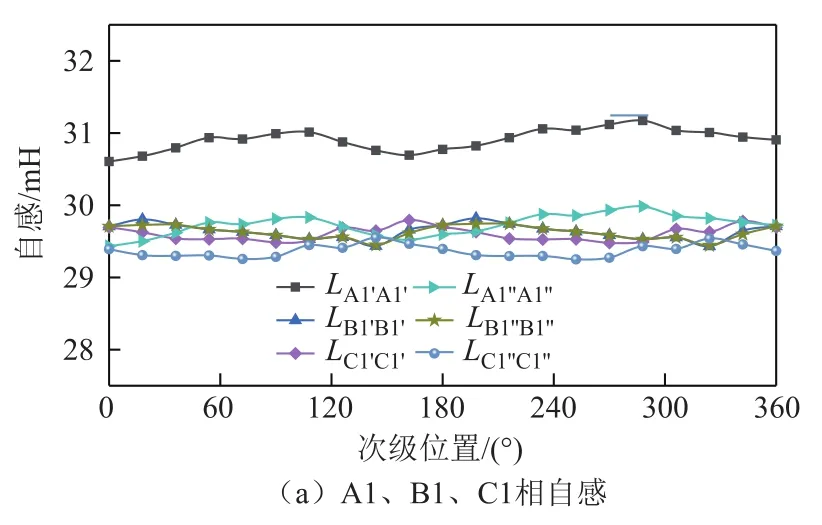
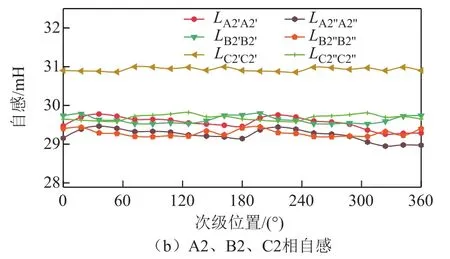
圖13 不等匝數結構自感Fig.13 Self-inductance of the unequal turn structure
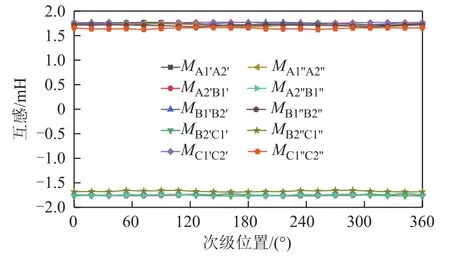
圖14 不等匝數結構互感Fig.14 Mutual-inductance of the unequal turn structure

式中,LS、LSV分別為相繞組自感的平均值和周期性結構中繞組自感的平均值;MM、MMV分別為兩相繞組的互感的平均值和周期性結構中繞組的互感平均值。
此處方差公式中的期望值采用周期性結構中的自感平均值和互感平均值,是因為周期性結構是一個不考慮邊端效應且繞組均對稱,其電感值、互感值、電流值基本相同,然后不對稱模型中的參數與之對比,得出對稱性指標參數。公式后一項乘以2是因為互感的值是兩個一樣的,例如MA1B1和MB1A1,兩者數值是一樣的。
由文獻[16]中三相永磁直線電機推力波動與自感和互感差值的關系,此處可以推導出雙三相永磁直線電機推力波動與自感和互感差值的關系。因為對稱的電感是不會產生負載推力波動,只有各相電感不平衡才會產生推力波動。為了簡化推導,此處僅考慮 C2相自感不平衡對推力波動的影響,那么C2相不平衡的那部分電感可表示為[16]
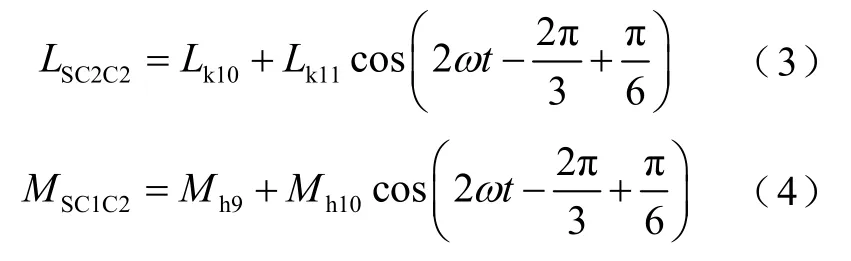
式中,Lk10為C2相自感平均值與周期性模型自感平均值的差值;Lk11為相自感峰值與周期性模型自感峰值平均值的差值;Mh9為兩相互感平均值與周期性模型互感平均值的差值;Mh10為兩相互感峰值與周期性模型互感峰值平均值的差值。
由此不平衡電感產生的電樞壓降為
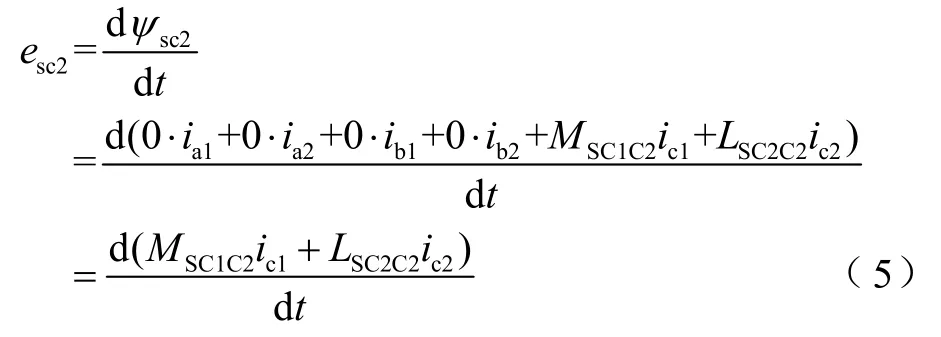
式中,ic1為C1相電流;ic2為C2相電流。那么,由此不平衡電感產生的推力波動表達式為
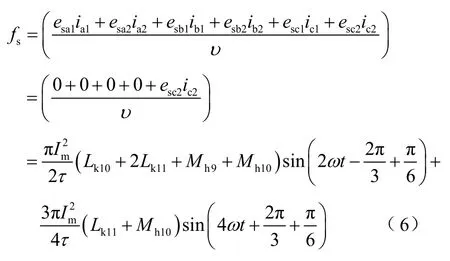
由式(6)可以看出推力波動與自感的差值Lk10、Lk11和互感的差值Mh9、Mh10成正比,由于自感的差值大于互感的差值,所以說電機中自感的不對稱對推力波動的影響更大。由式(6)也能看出不平衡系數kL的定義有實際的意義。
此外周期性結構、常規結構、端部優化結構與不等匝數結構的不平衡系數kL計算結果見表2。由表2計算結果可得,不等匝數結構的kL值最小。說明不等匝數結構的電感對稱度更高,常規結構和端部優化結構的kL差不多,說明通過改變端部邊端齒尺寸,對電感平衡度影響不大。
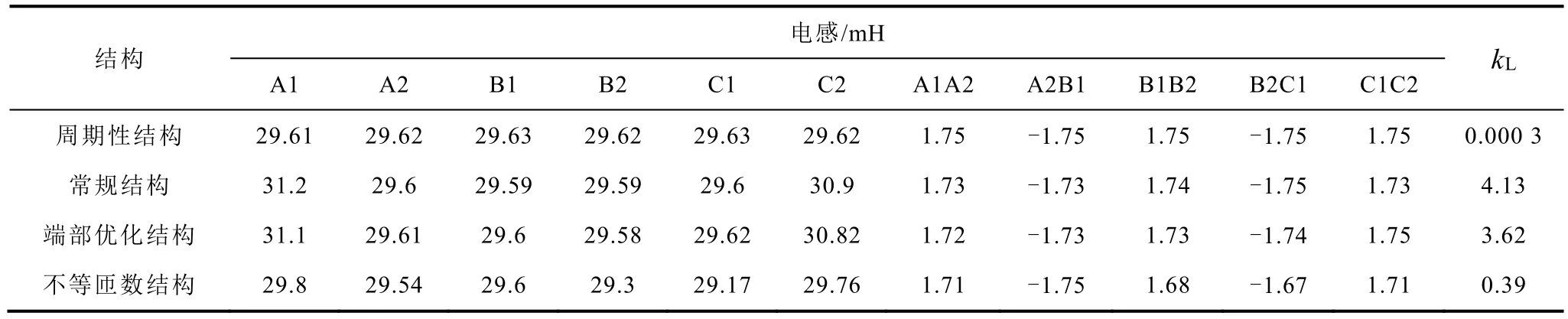
表2 電感不平衡系數kL值計算Tab.2 The calculation of the balance coefficient kL
4.2 電磁性能分析
繞組匝數的改變能改善電機的電感不對稱度,那么同樣對電樞電流的諧波幅值和對稱度也會有影響。通過計算可得電樞電流的諧波畸變率THD%見表 3,除了周期性模型之外,其中不等匝數結構的電流畸變率最小。
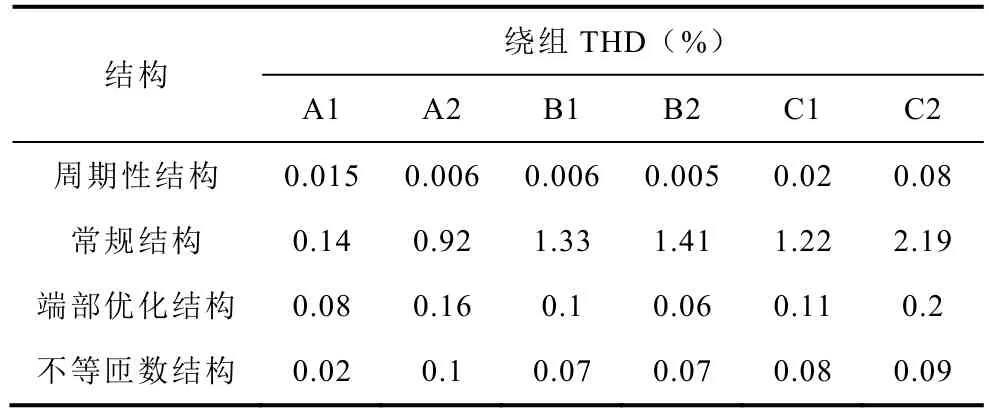
表3 四種結構電流畸變率THDTab.3 The THD of the four structures
按照上面對電感不平衡系數的定義,此處同樣定義一個電流不平衡系數kC,表達式為

式中,I、IP分別為電樞電流的基波幅值和周期性結構中電樞電流的基波幅值平均值。
然后用定義的公式計算電樞電流的不平衡系數,見表4。常規結構、端部優化結構、不等匝數結構的電流不平衡系數分別為 0.219 9、0.182 7和0.104 5,說明采用了不等匝數結構使得電樞電流對稱度更高。
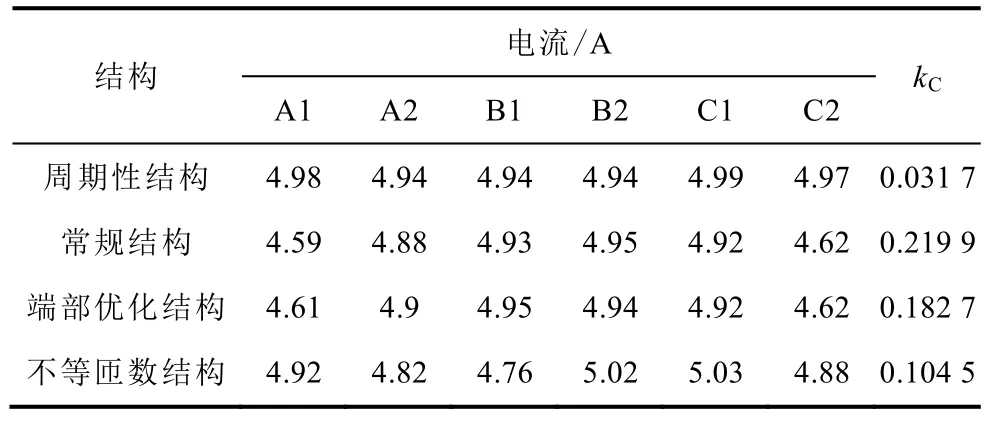
表4 電流不平衡系數kC值計算Tab.4 The calculation of the balance coefficient kC
如圖15所示,不等匝數結構推力比傳統等匝數結構要大,這是因為不等匝數結構的電機比傳統等匝數結構電機的線負荷要略微增大,傳統等匝數線負荷為 50.9A/mm,而不等匝數結構的線負荷52.688A/mm,由于直線式結構的特點,電流存在不對稱,所以線負荷和電流密度不能完全一致。為了研究繞組不同匝數對推力波動的影響,將推力波形進行頻譜分析,結果如圖16所示。由圖16可得推力波動各次諧波的幅值皆有降低。
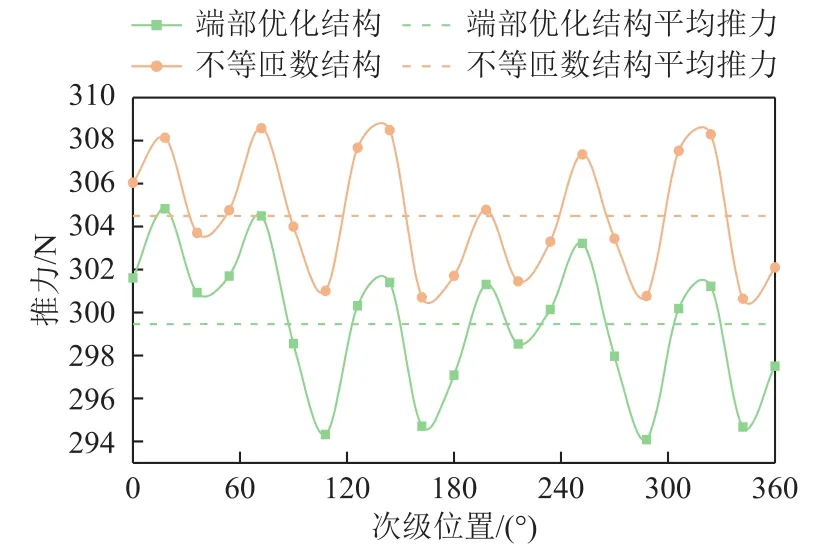
圖15 兩種優化結構的推力曲線Fig.15 Thrust force waveforms of two optimized structures

圖16 兩種優化結構的推力頻譜分析Fig.16 Spectrum analysis of two optimized structures
由圖15計算得到的推力減去平均推力(基波分量),就可以得到負載時候的推力波動范圍,如圖17所示,可以看出一個電周期內的波動差異,也能更直觀地比較不等匝數結構對電機推力波動的抑制作用。由圖中可見,不等匝數結構的負載推力波動峰峰值為 7.38N,相對于端部優化結構下降了 23%,推力波動為2.43%,相對下降了30.7%。

圖17 不等匝數結構的推力波動Fig.17 The thrust force fluctuation of the unequal turns structure
為了進一步驗證不等匝數結構在電機過載情況下對電機推力波動的削弱作用,如圖18所示。當供電電壓較低(電負荷較低)時,鐵磁材料的飽和程度較低,因此推力隨著供電電壓的增加幾乎線性增加;但是當供電電壓過大時,由于磁路飽和,推力與供電電壓不再成線性關系。此外,在供電電壓較低時,不等匝數結構對推力波動的削弱作用較大,在磁路逐漸飽和后,削弱作用逐漸減小,但仍然有削弱作用。
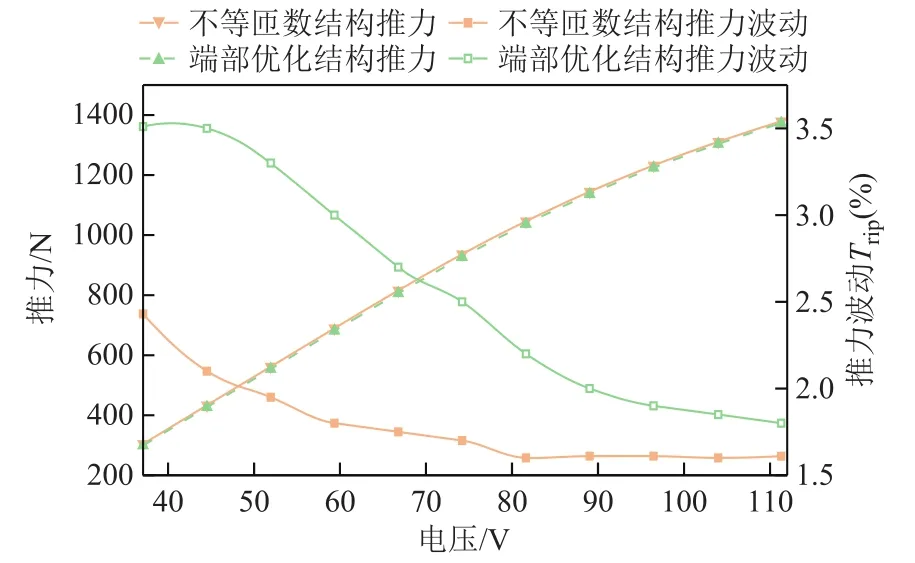
圖18 推力和推力波動隨供電電壓的變化關系Fig.18 The thrust force and thrust force ripple variation with voltage
5 試驗驗證
試驗基于邊端齒相同的常規結構樣機展開,因為該樣機鐵心采用自鉚接結構,加工精度高,測試結果準確,能夠驗證分析模型的準確性。測試平臺如圖19所示,樣機由一臺空心線圈永磁直線電機拖動進行試驗,采用空心線圈永磁直線電機是因為其不存在齒槽力,推力波動小,速度平穩性好,不會給測試結果帶來誤差。
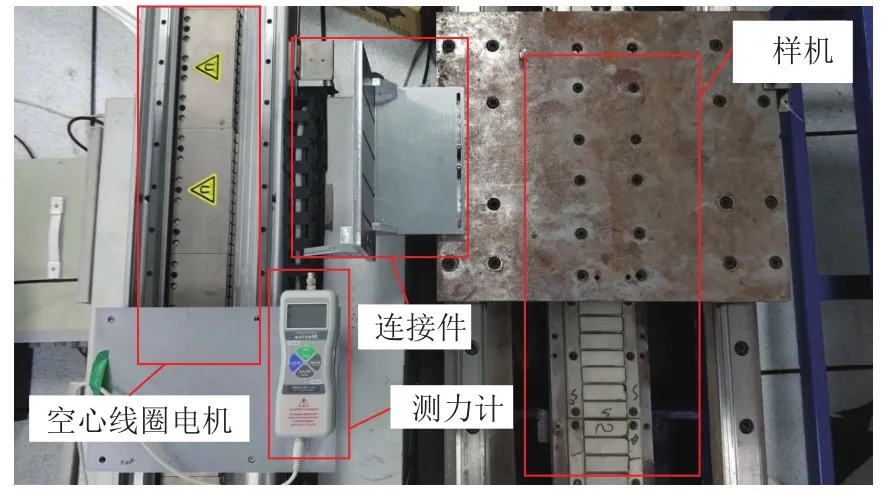
圖19 樣機測試平臺Fig.19 The test rig of prototyped machine

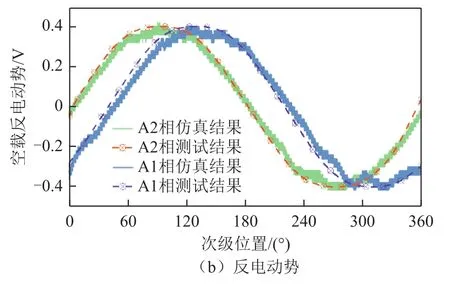
圖20 樣機仿真和測試結果比較Fig.20 Comparison of predicted and measured prototyped machine
圖20顯示了樣機的測試結果與仿真結果對比,顯然定位力和反電動勢的波形吻合度較好,證明了前述仿真模型與仿真結果的正確性。
6 結論
針對雙三相永磁直線電機的推力波動進行了分析,其主要是直線式結構中鐵心和繞組的開斷所造成的:一種是由于邊端效應引起的磁路不對稱;另一種由于繞組空間位置排布不對稱引起的自感和互感不對稱。論文建立了雙三相永磁直線同步電機(DTP-PMLSM)的有限元模型并計算了推力,分析了這兩種不對稱因素對推力波動的影響程度并提出了改善措施。
1)邊端效應引起的磁路不對稱:通過優化邊端的邊端齒尺寸改善了磁路。當左端邊端齒和右端邊端齒分別等于 6.4mm和 6.3mm時,電機的各相反電動勢趨于相等,使原本不對稱的反電動勢趨于對稱,電機的推力波動下降了37.3%。
2)繞組空間位置排布不對稱引起的自感不對稱:通過采用改變相電感的方法,使原本不對稱的電感趨于對稱。相比自感,互感很小,可以忽略互感不對稱的影響。在不考慮飽和的情況下,由于電機的自感正比于匝數二次方,采用了不等匝數結構來改變自感。基于有限元進行了匝數優化,得到最佳的匝數分配。優化后的結構負載推力波動峰峰值下降23%,推力波動下降了30.7%。
3)在磁路不飽和的時候,不等匝數結構削弱推力波動效果明顯;而在磁路飽和情況下,其效果下降,但仍然有削弱電機推力波動的作用。
結果表明,雙三相永磁直線同步電機(DTPPMLSM)通過上述兩種方法,提高了磁路與電感的對稱性,有效降低了電機的推力波動,為推廣與應用打下了基礎。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
