基于狀態估計的高速受電弓魯棒預測控制
2021-03-16 08:36:38宋寶林謝松霖張翰濤劉志剛
電工技術學報 2021年5期
張 靜 宋寶林 謝松霖 張翰濤 劉志剛
(1. 西南交通大學機械工程學院 成都 611756 2. 西南交通大學電氣工程學院 成都 611756)
0 引言
目前,高速列車普遍采用電力牽引方式。受電弓是安裝在高速列車上的一種從接觸網上集取電流的專用設備,因此受電弓和接觸網之間平穩的接觸狀態是保證列車受流質量優良的關鍵[1],高速鐵路受電弓-接觸網系統示意圖如圖1所示。在高速列車受流質量的評價體系中,接觸力是其非常重要的指標。隨著高速列車速度的提升,受電弓與接觸網之間復雜的耦合振動會更加劇烈,體現在接觸力的波動變大,受流質量急劇變差,脆弱的弓網系統已經成為高速列車舒適性和可靠性提升的嚴重障礙[2]。當接觸力波動幅度過大時,弓網系統容易出現離線、燃弧等現象,使得受流質量變差,受電弓也容易出現故障損壞。接觸力過大時,既加重了受電弓滑板的磨損,同時也增加了運維成本。根據中國鐵路總公司統計資料,牽引供電系統故障造成的鐵路事故在2008年、2009和2010年分別占到了當年事故總數的28.8%、40.4%、29.6%,因此研究高速運行中受電弓-接觸網系統的動態性能和改進措施對高速鐵路安全運行有重要的意義[3]。
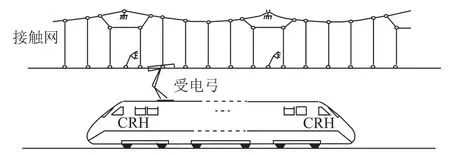
圖1 高速鐵路受電弓-接觸網系統示意圖Fig.1 Schematic diagram of pantograph-catenary system of high speed railway
針對弓網接觸力波動的問題,國內外學者對高速弓網關系進行了大量的分析與研究,比如優化受電弓結構[4]、優化接觸網結構[5-6]和優化受電弓靜態抬升力[7]等。由于受電弓結構優化難以及時調整,所以適應不同類型的接觸網的靈活性較差。如果針對既有線路進行接觸網結構優化,將涉及接觸網的大規模改造,需要花費巨大的人力物力,成本極高。優化受電弓靜態抬升力的作用效果又十分有限。
為解決上述問題,學者們提出受電弓主動控制方法以減小弓網接觸力的波動。受電弓主動控制是根據弓網系統的部分狀態量,運用現代控制理論,對受電弓施加控制力,通過調節受電弓弓頭抬升量來減小弓網接觸力的波動。與上面提到的方法相比,受電弓主動控制的適用性較高,該控制方法不需要針對具體類型的受電弓和接觸網,控制算法確定的情況下只需調節控制參數便能應用于所有類型的弓網系統,并且受電弓主動控制只需適當改造受電弓,無需優化接觸網的結構,無論是新建線路還是既有線路皆可應用,成本較低。
受電弓主動控制系統包括控制算法、量測系統和控制結構等。其中,控制算法是受電弓主動控制研究的核心和重點。文獻[8]基于弓網接觸力的伺服控制模型,設計了弓網接觸力的線性二次型調節器(Linear Quadratic Regulator, LQR)。仿真結果表明,調節器能有效減小弓網接觸力波動,改善弓網受流質量。文獻[9]在弓網耦合振動系統全局輸入-輸出線性化模型的基礎上,提出一種基于狀態反饋線性化的弓網系統全局線性化主動控制策略。相較于LQR最優控制策略,對期望弓網接觸壓力均值都有更好的跟蹤效果。文獻[10]將魯棒控制問題轉換為最優控制問題,利用Lyapunov穩定性理論描述了一個合適的線性狀態反饋控制律,以保證閉環系統的二次穩定性和性能魯棒性,并通過仿真研究證明了有效性。文獻[11]根據建立的弓網模型和接觸力歷史數據,利用預測控制技術,預測下一時刻接觸力,使實際值接近于理論值。結果表明控制策略能有效抑制離線電弧的發生,改善了受流質量。文獻[12]運用模糊自適應終端滑模控制解決弓網優載荷伺服控制問題,結果表明控制算法降低了對弓網模型精確性的要求,具有較好的伺服跟蹤性能。文獻[13]利用非線性系統的微分幾何理論,構造微分同胚變換和狀態反饋表達式,得到了受電弓線性化模型,設計反饋控制律解決弓網接觸力的跟蹤問題。研究結果表明,所提出的反饋線性化控制策略能有效解決弓網接觸力的跟蹤問題,為一定工況下弓網最優接觸力的跟蹤控制提供可行方案。
綜上可知,大多數受電弓主動控制策略屬于狀態反饋控制方法,控制目標大都為減小接觸力的波動,并沒有考慮作動器的輸出限制等實際問題;部分文獻只對弓網接觸力進行了估計,沒有提及受電弓其他狀態量的獲取方法,在基于狀態反饋的控制中,狀態量的獲取與精確性極為重要。控制算法的驗證和分析大都在簡單弓網模型上進行。在簡單弓網模型中,接觸網通常被看作為一根可變剛度的彈簧,與實際的接觸網結構差別很大,不能完全反映接觸網上波動傳播和弓網系統振動狀態。
本文以高速鐵路受電弓-接觸網系統為研究對象,以減小弓網接觸力的波動,即降低接觸力的標準差為主要目標,提出一種基于狀態估計的受電弓魯棒預測控制策略。首先,考慮到受電弓工作環境的強烈電磁干擾,提出一種考慮量測數據丟失的魯棒卡爾曼濾波方法以獲取受電弓的狀態量,為控制器提供精確的受電弓狀態估計值;然后,根據增廣后的受電弓-接觸網系統狀態空間方程,設計基于狀態估計的魯棒預測控制方法;最后,在引用的非線性弓網系統模型上,驗證了所提出的控制策略的有效性和魯棒性。
1 問題描述
1.1 弓網系統模型
本文引用文獻[14]中的弓網系統模型,該弓網系統模型通過受電弓歸算質量模型和接觸網有限元模型結合得到。
受電弓歸算質量模型的動力學方程為

式中,m1、m2、m3分別為受電弓弓頭、上框架、下框架的質量;k1、k2、k3分別為受電弓弓頭、上框架、下框架的剛度;c1、c2、c3分別為受電弓弓頭、上框架、下框架的阻尼;x1、x2、x3分別為受電弓弓頭、上框架、下框架的位移;分別為受電弓弓頭、上框架、下框架的速度;分別為各個質量塊的加速度;Fpc為弓網之間的動態接觸力;Fl為靜態抬升力;u為主動控制力。

控制器可安裝在有弓頭、上下框架之間和下框架等位置,本文統一安裝于下框架。
接觸網有限元模型的動力學方程表示為

式中,Mc為接觸網的集中質量矩陣;Kc為整體剛度矩陣;Cc為阻尼矩陣;和Xc分別為接觸網各個節點的加速度、速度及位移;Fc為外力。
根據式(1)和式(2),弓網系統模型表示為

1.2 控制目標
在設計減小弓網接觸力波動的控制器之前,應考慮以下幾個方面。
1)減小弓網接觸力波動:控制器的主要目標是在不影響弓網接觸力平均值或影響較小的情況下降低接觸力的標準差,即減小實時接觸力Fpc(t)與接觸力參考值Fr之間的差值

式中,e(t)為實時接觸力與參考值的誤差。
2)作動器輸出限制:作為工程應用研究,實際中任何一種作動器都不可能輸出無限能量。為了保證執行機構的穩定性能,必須在合理范圍內限制控制力的大小。假定輸出最大值為umax,則控制力的范圍為

3)弓頭抬升量限制:列車獲取電能過程中,弓頭抬升量是保證接觸網正常工作的關鍵,必須保證主動控制不會讓弓頭抬升量超過安全范圍。設抬升量最大值為x1max,則

在魯棒預測控制器的設計階段,需要一個面向控制的模型。接觸線上剛度的不均勻分布是導致受電弓-接觸網系統波動的主要原因,因此可以通過簡化接觸網對受電弓的影響來建立面向控制的受電弓-接觸網系統模型。文獻[15]利用有限元接觸網模型計算得到接觸網靜態剛度系數,再用最小二乘法擬合獲得平均剛度系數和剛度變化系數,即可得接觸網剛度的表達式為
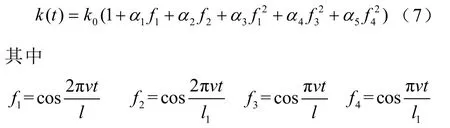
式中,v為車速;k0為接觸網平均剛度系數;l為接觸網跨距;l1為接觸網相鄰吊弦的間距;α1、α2、α3、α4、α5為接觸網剛度變化系數。
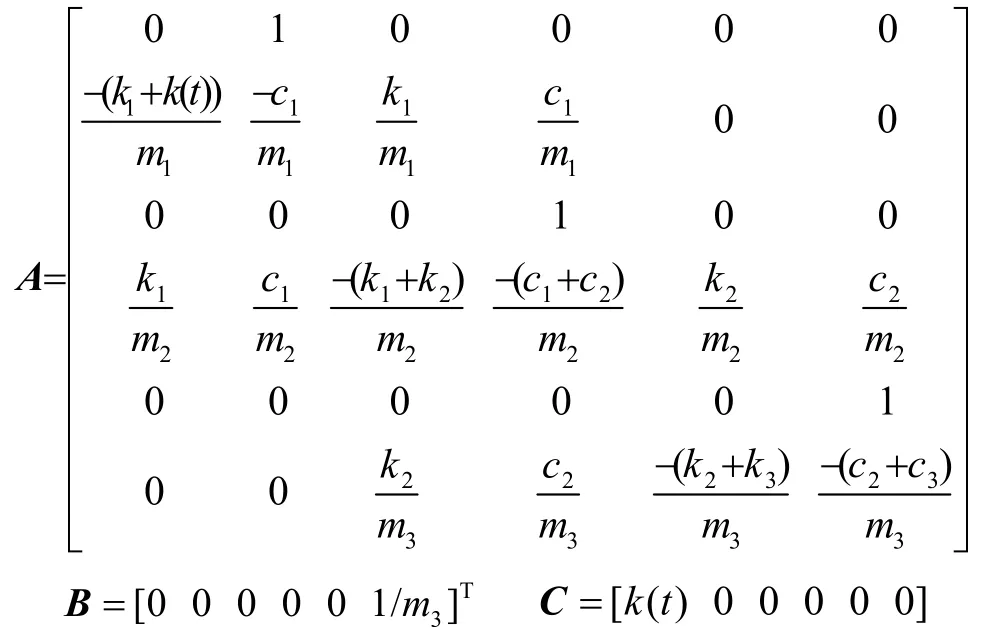
結合式(1)和式(7),實時弓網接觸力的表達式為Fpc(t)=k(t)x1。令系統狀態量則弓網系統的狀態空間方程為

式中,A、B、C為弓網系統狀態空間方程的系數矩陣;u為系統輸入;y為弓網接觸力。系數矩陣具體表達式為
魯棒預測控制器是通過最小化目標函數J∞(k)得到控制力u(k+i|k),目標函數表達式為
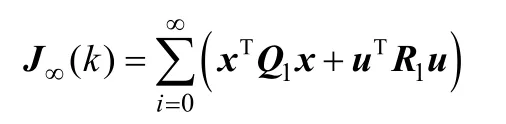
式中,Q1和R1為對稱正定加權矩陣;x(k+i|k)為受電弓狀態量,即位移和速度。因此minJ∞(k)是對系統狀態量的優化。而控制器的主要目標是減少接觸力參考值與實際接觸力的差值,弓網接觸力是弓網系統的輸出量而非狀態量,因此需要將接觸力跟蹤誤差的積分增廣至弓網系統狀態空間方程中。
結合式(4)~式(6),則式(8)增廣形式為
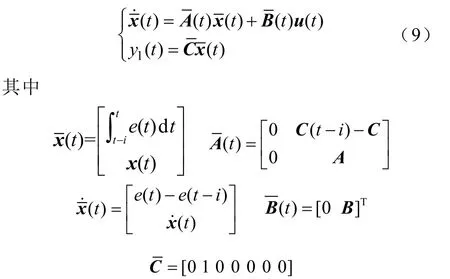
式中,y1(t)為受電弓弓頭抬升量;中的C(t-i)表達式為C(t-i)=[k(t-i) 0 0 0 0 0]。
因此,整個問題可以轉換為設計一個狀態反饋控制律,即

式中,G(t)為控制增益矩陣,其由魯棒預測控制器計算得到。
2 受電弓狀態估計
由式(9)和式(10)可知,控制力的計算需要受電弓的狀態量。然而,受電弓工作環境有強烈的電磁干擾,檢測到的數據會包含大量的噪聲成分,并有量測數據隨機丟失的情況,同時在受電弓上安裝多個傳感器也會降低控制系統的可靠性。因此,本文通過狀態估計方法估計受電弓的狀態,不僅減少了傳感器數量,而且還能獲得較高精確度的受電弓狀態量。可觀測的狀態量為受電弓質量塊的垂直位移,采用改進后的卡爾曼濾波方程實時估計每個質量塊的垂直位移和速度。
弓網系統的離散狀態空間方程可以表示為
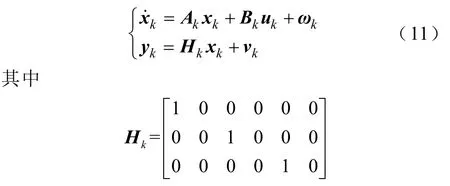
式中,Ak和Bk分別為與式(8)中A和B有關的系數矩陣;yk為量測輸出;ωk為過程噪聲;νk為量測噪聲;ωk和νk為不相關的零均值高斯白噪聲,其協方差矩陣為Qk和Rk;xk為k時刻的系統狀態量;uk為系統輸入。
γk是值為1或0的伯努利分布序列。γk=1表示弓網系統獲得量測值,γk=0表示量測失敗即數據丟失,且不同時刻的γk是相互獨立的,其統計特性為
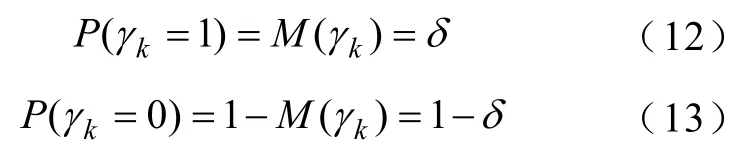
當γk=1時,yk=Hkxk+νk;當γk=0時,量測失敗,系統不能得到量測值,此時定義當前時刻的虛觀測值為[16]

令數據獲得時的觀測值為yreal=Hkxk+νk,虛觀測值代替數據丟失時的觀測信息,則等效的觀測方程為

結合式(11)和式(15)給出標準卡爾曼濾波算法。

由于虛觀測值是在傳感器觀測值丟失時通過歷史狀態預測得到的,因此虛觀測值相比于傳感器真實觀測值會有很大的誤差,若直接將虛觀測值代入卡爾曼濾波方程,則會增大狀態估計的誤差,同時由于環境的復雜性等原因,量測數據丟失的現象是不可避免的,經典的卡爾曼濾波方法不適合解決觀測不確定的狀態估計問題[16-22]。為此應用基于Huber的魯棒卡爾曼濾波算法對受電弓狀態進行估計[16]。將卡爾曼濾波方程的式(19)和式(20)修改為

結合式(16)~式(19)和式(22),得到受電弓狀態量量測數據丟失情況下的虛觀測魯棒卡爾曼濾波算法,為控制增益矩陣和控制力的計算提供實時受電弓狀態估計值。
3 魯棒預測控制器
受電弓復雜的工作環境會導致受電弓參數攝動,而傳統模型預測控制在參數攝動的情況下,其控制效果會下降,為此設計受電弓魯棒預測控制器[23]。將式(9)離散化,得到增廣后的弓網系統離散狀態空間方程為

式中,Q1和R1為對稱正定加權矩陣,它表示在k時刻進行滾動優化時,應使模型參數在Ω內任意變化時對應于“最壞”情況的無窮時域性能指標最優。解決“極小-極大”優化問題的方法是給出極大問題的上界,將“極小-極大”優化問題轉換為極小化問題。
為了解決控制變量數目無窮的問題,采用單一狀態反饋控制律u(k+i|k) =Gx(k+i|k),i≥ 0,把系統狀態保持在一個不變集內。
通過以上的轉換,解決了“極小-極大”優化問題和控制變量數目無窮的問題,k時刻,G的表達式為

式中,Y從以下線性目標最小化問題的解中獲得


4 仿真驗證
為了驗證上述提出的狀態估計算法和魯棒預測控制算法的有效性,取DSA380型受電弓和京津線接觸網參數,見表1和表2。

表1 DSA380型受電弓歸算質量模型參數Tab.1 Parameters of calculation quality model of DSA380 pantograph
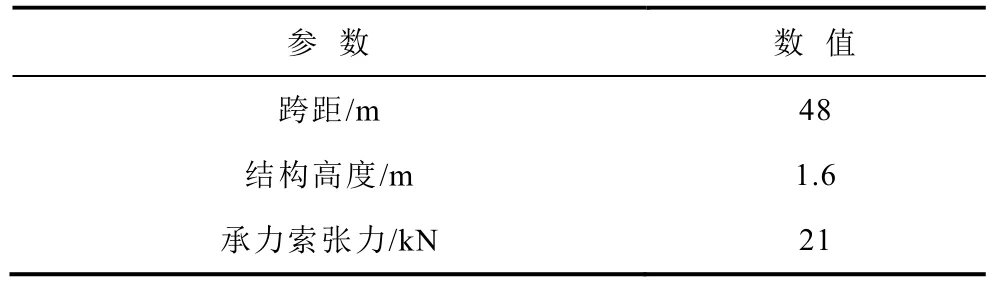
表2 接觸網結構參數Tab.2 Structural parameters of catenary
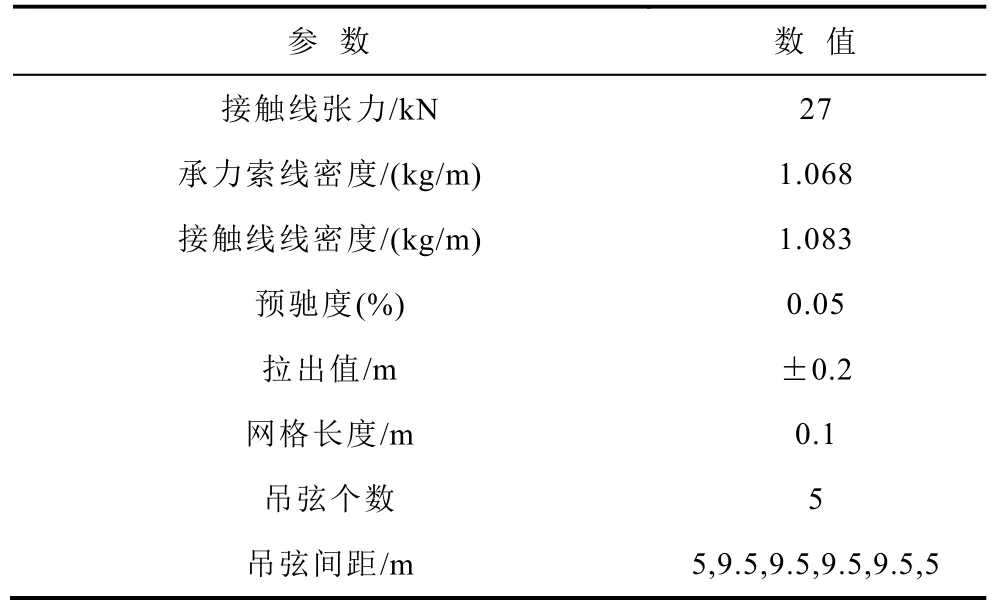
(續)
首先驗證量測數據丟失情況下的估計算法在非線性弓網模型中的精確性,取初始值為圖2為受電弓位移狀態的量測值、估計值和仿真值,圖2a~圖2c分別表示受電弓質量塊一、二和三的垂向位移的量測值、估計值和實際值,虛線為量測值,實線為估計值,點畫線為仿真值。圖3為受電弓速度狀態的估計值和仿真值,圖3a~圖3c分別為質量塊一、二和三的垂向速度的估計值和仿真值。量測值是在量測數據部分丟失和工作環境有強烈噪聲干擾的情況下,傳感器檢測獲得的系統位移;仿真值是在不考慮任何外界干擾的情況下,仿真計算出的理論計算值。
仿真計算結果表明:圖2的方均根誤差分別為0.001 4,0.001 4和0.001 4,圖3的方均根誤差分別為0.007 1,0.009 3和0.007 1,驗證了狀態估計算法的精確性。


圖2 受電弓位移狀態的量測值、估計值和仿真值Fig.2 Measured values, estimated values and simulation value of pantograph displacement state

圖3 受電弓速度狀態的估計值和仿真值Fig.3 Estimated values and simulation values of pantograph speed state
用非線性弓網模型驗證所提出的控制器的有效性,設弓頭抬升量最大值x1max為0.1m,控制力最大值umax為200N,控制參數系數矩陣的參數攝動范圍在10%以內。本文根據上述參數,在360km/h、300km/h和250km/h速度下分別進行弓網接觸力仿真計算,圖4為在非線性弓網模型中控制前后的接觸力。

圖4 不同速度下接觸力控制前后比較Fig.4 Comparison of contact force before and after control at different speeds
仿真結果表明:即使在受電弓參數攝動的情況下,控制器仍能表現出優良特性,大多數位置的接觸力的極大值減小,極小值增大,不同速度下的接觸力標準差都有所降低,在 360km/h、300km/h和250km/h速度下分別降低了 19.18%、21.16%和16.21%,接觸力平均值降低了1.2%、4.7%和7.3%。在不同工況下,控制器在影響接觸力平均值較小的情況下,能有效降低接觸力的標準差,驗證了控制器的有效性和魯棒性。
5 結論
本文提出一種基于狀態估計的受電弓魯棒預測控制器,以減輕弓網之間的接觸力波動,提高高速列車弓網受流質量。考慮受電弓工作環境中電磁干擾的影響和量測數據隨機丟失的情況,采用帶虛觀測的魯棒卡爾曼濾波算法實時估計受電弓狀態。為了降低接觸力的波動,提高列車受流質量,同時考慮作動器輸出限制和受電弓弓頭垂向位移的約束,提出一種基于狀態估計的受電弓魯棒預測控制策略。本文通過仿真驗證了估計算法的精確性和控制器的有效性及魯棒性。仿真結果表明,即便在受電弓-接觸網系統參數攝動的情況下,提出的控制策略仍能有效降低接觸力的波動,改善高速列車弓網受流質量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
