開繞組磁場調(diào)制永磁直線電機的單位功率因數(shù)弱磁控制
2021-03-16 08:36:08宋鑫鑫趙文祥
電工技術學報 2021年5期
宋鑫鑫 趙文祥 成 瑀
(江蘇大學電氣信息工程學院 鎮(zhèn)江 212013)
0 引言
近年來,直線電機以其優(yōu)異的性能在長行程應用領域受到越來越多的關注[1-2],同采用旋轉電機的直線傳動設施相比,直線電機傳動系統(tǒng)省掉了笨重又昂貴的旋轉直線變換機構,簡化了系統(tǒng)復雜度。感應式的直線電機雖然結構簡單、技術成熟,但其本體效率較低[3-4];傳統(tǒng)的永磁直線電機的功率因數(shù)和效率相對較高[5],但需沿軌道布置永磁體,增加了系統(tǒng)和維護成本[6]。近年來,出現(xiàn)的磁場調(diào)制永磁直線(Field-Modulated Permanent Magnet Linear,FMPML)電機將永磁體和電機繞組放置在短動子側,長定子側僅由低成本的導磁材料組成,具有高可靠性、高推力密度的優(yōu)點。FMPML電機非常適用于軌道交通等長行程領域,但其功率因數(shù)仍然較低,采用常規(guī)控制方法會增加系統(tǒng)成本[7-8]。因此,為實現(xiàn)寬調(diào)速范圍和高性能控制,對其進行功率因數(shù)補償具有重要的意義。
同感應電機相比,永磁同步電機的主磁場由永磁體產(chǎn)生,電機反電動勢隨轉速的增加而迅速增加。當直流母線電壓固定時,其調(diào)速范圍受限。雙逆變器拓撲可以提供高端電壓,并有效擴展功率容量。這種拓撲將定子繞組的中性點打開,在繞組兩端各并聯(lián)一個兩電平逆變器,形成開放式繞組電機[9]。兩個逆變器由同一個電源供電時,會形成零序電流,對電機的正常運行產(chǎn)生影響,造成功率損耗增加,電流波形畸變,影響電機的控制性能,目前的研究主要集中在選擇合適的電壓矢量以消除零序電流。文獻[10-13]針對以上問題提出了幾種抑制零序電流的方法。兩個逆變器由隔離雙電源供電且電壓比為k:1時,可以獲得多電平效果[14-15],并且無零序電流產(chǎn)生,增加了控制系統(tǒng)的靈活性。但雙電源拓撲增加了系統(tǒng)的成本和質(zhì)量。當一個逆變器由直流電源供電,另一個由飛跨電容器組供電時,降低了系統(tǒng)成本[16],擴展了恒功率區(qū)的調(diào)速范圍,且這種控制策略也有合適的控制方法維持電容電壓的穩(wěn)定。此外,死區(qū)效應對系統(tǒng)性能的影響亦有相應的補償策略[17]。
目前,永磁同步電機弱磁控制的研究相對成熟,針對不同的弱磁區(qū)域均有不同控制策略。永磁電機的弱磁控制通常以產(chǎn)生去磁電流調(diào)節(jié)磁通量的方式來實現(xiàn)[18]。常用的弱磁策略有反饋法[19-20]和查表法等。文獻[21]采用二維查表法,具有很好的動態(tài)性能,但需離線測試,通用性較弱。電壓反饋控制弱磁策略因其較強的魯棒性和通用性,是一種很好的弱磁控制策略。
本文提出一種基于飛跨電容和永磁直線電機的開繞組磁場調(diào)制單位功率因數(shù)弱磁控制策略。首先考慮FMPML電機低功率因數(shù)的問題,通過功率解耦分配理論,解耦出電機系統(tǒng)運行所需功率流,實現(xiàn)主逆變器單位功率因數(shù)運行,電容逆變器補償無功功率。然后,結合弱磁控制,將弱磁和功率因數(shù)補償?shù)奶攸c相結合,拓寬了系統(tǒng)調(diào)速范圍和恒轉矩區(qū)域。最后,所提控制策略的有效性通過搭建的FMPML電機實驗平臺來驗證。
1 FMPML電機特性及電機系統(tǒng)拓撲
1.1 FMPML電機結構特性的分
三相開繞組FMPML電機的截面如圖1所示。帶有凸齒的簡單鐵心構成該電機定子,其成本較低,適合于長行程應用領域。動子由插入動子齒內(nèi)的多個永磁體陣列和帶有凸齒的鐵心及三相集中繞組組成。三個磁化方向如圖1中箭頭所示的永磁體組成1個永磁體陣列。垂直磁化的永磁體夾在兩個水平磁化的永磁體之間,提高了氣隙磁通密度。FMPML在0.3m/s時的反電動勢如圖2所示,反電動勢波形具有良好的正弦性。

圖1 磁場調(diào)制永磁直線電機剖視圖Fig.1 Sectional views of FMPML motor

圖2 磁場調(diào)制永磁直線電機在0.3m/s時反電動勢波形Fig.2 Back-EMFs waveforms of FMPML motor at speed of 0.3m/s
在兩相旋轉坐標系下,F(xiàn)MPML電機的磁鏈方程為
式中,ψd、ψq分別為定子磁鏈旋轉坐標系d、q軸分量;Ld、Lq和id、iq分別為d、q軸電感和電流;fψ為永磁磁鏈幅值。
d、q電壓方程可以表示為

式中,ud、uq分別為定子電壓d、q軸分量;Rs為定子電阻;p為微分算子;ωr=2πv/τs為動子磁鏈的電角頻率,τs為定子極距,v為FMPML動子速度。
在旋轉坐標系下,電機的推力方程為

式中,F(xiàn)e為永磁推力。
當電機穩(wěn)態(tài)運行并忽略定子壓降時,式(2)可以改寫為
FMPML電機基于磁場調(diào)制原理工作。根據(jù)磁場調(diào)制原理,在氣隙中會產(chǎn)生多極磁場,該磁場與動子上的多極磁極相互作用以產(chǎn)生永磁推力。圖 1所示電機的調(diào)制比為 9,槽極差異大,這會導致漏磁增加及功率因數(shù)降低。圖3是相電壓ua與相電流ia在額定工況下的仿真結果,功率因數(shù)約為0.46。

圖3 額定工況下相電壓與相電流的仿真結果Fig.3 Simulation results of phase voltage and phase current under rated operation
1.2 飛跨電容開繞組系統(tǒng)拓撲
圖4為飛跨電容開繞組FMPML電機系統(tǒng)的拓撲。在該拓撲中,與直流母線相連的逆變器稱為主逆變器;與電容器組相連接的逆變器稱為電容逆變器。兩個逆變器的直流母線彼此隔離,無法產(chǎn)生干擾驅動系統(tǒng)的零序電流。在該拓撲中,電容器組用于提供電機控制系統(tǒng)運行所需的無功功率,可通過電容電壓控制策略將其維持在更高的電壓等級。開繞組拓撲下電機端所獲得的電壓矢量為
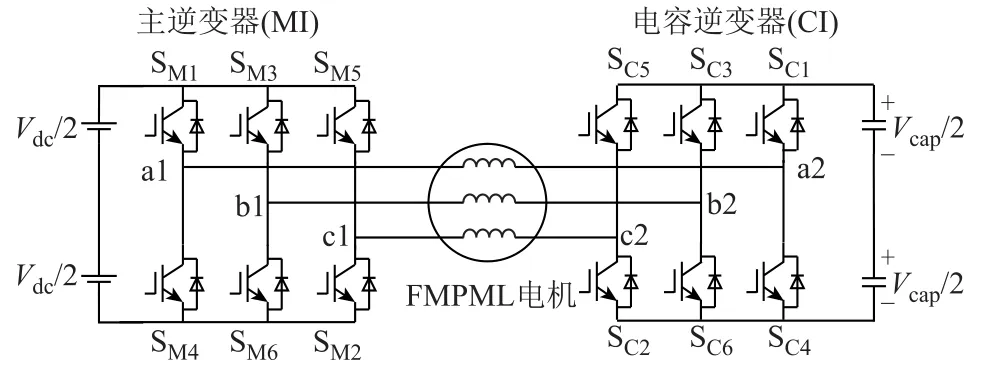
圖4 基于飛跨電容開繞組FMPML電機的系統(tǒng)拓撲Fig.4 System topology of open-end winding FMPML motor with floating capacitor

式中,us為系統(tǒng)的合成電壓矢量;uMI、uCI分別為主逆變器和電容逆變器的輸出電壓矢量。
2 功率解耦分配及電容電壓控制
2.1 功率解耦分配原理
在本文所提出的功率分配策略中,具體功率流如圖5所示,主逆變器用于提供電機運行所需的全部有功功率,電容逆變器用于提供電機運行所需的無功功率。因此,主逆變器以單位功率因數(shù)狀態(tài)運行,有利于降低電源的無功壓力。

圖5 開繞組系統(tǒng)功率流示意圖Fig.5 Diagram of power flow in open-end-winding motor drive
圖6為電壓電流之間的關系,其中,uactive為系統(tǒng)所需的有功電壓分量,ureactive為系統(tǒng)所需的無功電壓分量,Is為系統(tǒng)的電流矢量,θvi為uMI電壓矢量與電流矢量Is的夾角,φ為功率因數(shù)角。系統(tǒng)穩(wěn)定運行時,us和功率因數(shù)角均恒定,因此系統(tǒng)有功電壓分量uactive和無功電壓分量ureactive均恒定。uMI、uCI和uactive之間的關系表示為

圖6 電流電壓矢量相位關系Fig.6 Phase relationships between current and voltage vectors
由式(7)可知,當θvi=0時,系統(tǒng)所需的有功電壓分量完全由主逆變器承擔,無功電壓分量完全由電容逆變器承擔,即

2.2 電容電壓控制
本文采用 PI調(diào)節(jié)器來維持電容電壓在電機動態(tài)及穩(wěn)態(tài)運行時的穩(wěn)定[22]。并且,考慮到 FMPML電機功率因數(shù)較低,在低速運行時,通過較低的直流母線電壓將電容電壓提升到一個更高的電壓等級。將電容電壓的實測值與給定值的誤差送入電容PI調(diào)節(jié)器得到電容器組充電電壓給定值ucps,并將ucps通過三相電機繞組充入電容器組,以維持電容電壓的穩(wěn)定。由此可以得到考慮電容電壓控制時,主逆變器參考電壓計算公式為
考慮開繞組電壓矢量計算公式(見式(5)),得到電容逆變器的參考電壓為

式中,uCId、uCIq為電容逆變器的參考電壓。
通過以上所述方法,實現(xiàn)電機驅動系統(tǒng)的單位功率因數(shù)運行。此外,電機本體功率因數(shù)越低,該策略控制效果越為明顯。
3 基于飛跨電容的弱磁控制策略
圖7為本文所提控制策略的控制框圖。其中,電機運行所需q軸參考電流由速度閉環(huán)PI調(diào)節(jié)器產(chǎn)生,d軸電流采用id=0控制策略。電機運行于高速時,dq軸的電壓耦合導致 dq軸電流控制精度下降,采用電流反饋解耦模塊來減弱dq軸之間的耦合。

圖7 單位功率因數(shù)弱磁控制框圖Fig.7 Block diagram of unit power factor field weakening control
電機在實際運行時,受限于直流電源輸出電壓和電流的能力,其輸出的電壓和電流均有一個極限值,其約束方程為

式中,Umax為電壓極限值;Imax為電流極限值。
電機系統(tǒng)穩(wěn)態(tài)運行時,將式(4)代入式(11)中,可得

式中,Ldc、Lqc為考慮電容逆變器之后的等效電感。
由式(11)和式(12)可知,電流極限方程是以O1(0,0)為圓心的圓,電壓極限方程是以O2(-ψf/Ldc,0)為中心的橢圓,電壓電流極限軌跡如圖 8所示。電機在升速的過程中,端電壓不斷上升,電機工作點由原點沿著最大轉矩電流比運行軌跡O1A運行,當轉速達到ω1時繼續(xù)升速,則需采用弱磁控制策略,且dq軸電流工作點位于電流極限圓與電壓極限橢圓的重合區(qū)域。

圖8 電壓電流極限軌跡Fig.8 Voltage and current limiting track
在所提控制策略中,將主逆變器母線電壓作為弱磁給定參考值,并采集主逆變器 d、q軸電壓參考值作為反饋值,以判斷是否進入弱磁控制。弱磁控制示意圖如圖7中的弱磁模塊所示,弱磁電流由式(13)產(chǎn)生。通過該方法主逆變器能夠始終輸出最大有功功率。

式中,Udc為主逆變器母線電壓;PI_out為弱磁 PI調(diào)節(jié)器輸出。
4 仿真與實驗
4.1 仿真分析
系統(tǒng)電源的穩(wěn)定性對電機的控制性能有重要的影響,考慮系統(tǒng)拓撲中電容器組為電容逆變器供電,因此電容電壓的穩(wěn)定性影響了電機控制效果。圖 9和圖10為電容器組電壓與電機A相電流的仿真結果,仿真結果表明電容電壓PI調(diào)節(jié)器的有效性。仿真中,主逆變器母線電壓為25V,電容電壓給定值為 50V,負載為10N,開關頻率為10kHz,電機參數(shù)與實測參數(shù)一致,見表1。0.8s時,速度由0.2m/s階躍至0.35m/s。圖9和圖10的仿真結果表明,速度階躍時,電容電壓能夠維持穩(wěn)定,為系統(tǒng)提供穩(wěn)定的電容電壓。
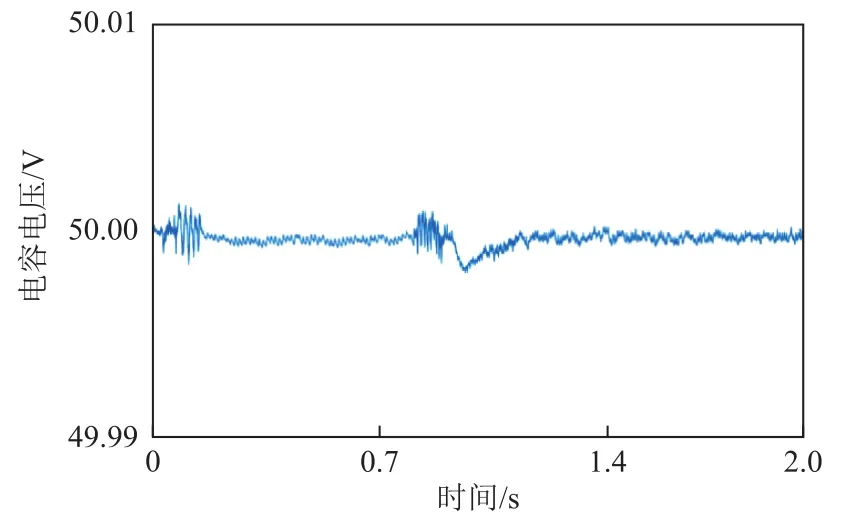
圖9 電容器組電壓仿真結果Fig.9 Simulation results of voltage of capacitor bank
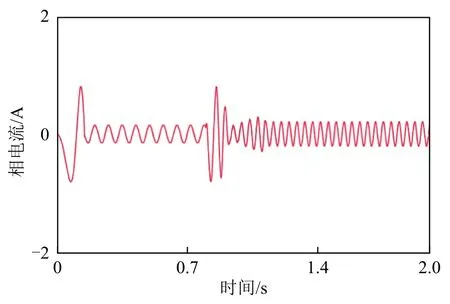
圖10 電機A相電流仿真結果Fig.10 Simulation results of A phase current

表1 磁場調(diào)制永磁直線電機參數(shù)Tab.1 Parameters of FMPML motor
圖11和圖12分別為電機速度和d、q軸電流。由圖11可以看出,該控制策略能夠控制電機速度快速跟隨給定。由圖12可知,電機在變速的過程中,速度達到極限,進入了弱磁控制區(qū),d軸電流由0A開始負向增加以達到弱磁擴速的目的,最終速度跟隨給定,表明所提弱磁控制策略的有效性,提升了系統(tǒng)的調(diào)速范圍。

圖11 變速運行的仿真結果Fig.11 Simulation results of speed step operation

圖12 變速運行弱磁電流仿真結果Fig.12 Simulation results of speed step running field weakening current
4.2 實驗驗證
根據(jù)上述所提控制策略搭建的開繞組磁場調(diào)制永磁直線電機驅動系統(tǒng)的實驗平臺如圖13所示。驅動系統(tǒng)以TI公司的浮點數(shù)產(chǎn)品TMS320F28377S作為處理器,使用英飛凌的1ED020I12FTA型驅動芯片和IXYS公司的IXYH50N120C3D1型IGBT器件搭建驅動電路。系統(tǒng)中的直流母線為主逆變器供電,電容器組與電容逆變器相連接。表1為被控磁場調(diào)制永磁直線電機參數(shù)。實驗中,IGBT開關頻率選擇10kHz,IGBT的死區(qū)時間為 4μs,主逆變器直流母線電壓是25V,電容器組電壓在系統(tǒng)上電時是25V,低速時,由電源為其充電至更高的電壓等級,實驗中選擇60V。

圖13 FMPML電機實驗平臺Fig.13 Experimental platform of FMPML motor
圖 14為與電容逆變器連接的電容器組的實驗結果。圖14包括電容器組電壓(上)、電機速度(下)。在0.2m/s運行速度下,將電容逆變器的直流電壓由25V升壓到60V,電容電壓在約1s內(nèi)升壓到60V并保持穩(wěn)定。圖15為電容器組在變速情況下的實驗結果。圖15包括電容器組電壓(上)、電機速度(下)。由圖可知,變速情況下,電容電壓略有上升,在電容電壓PI調(diào)節(jié)器的控制下能夠較好地跟隨給定值,與仿真結果相近。圖14和圖15的實驗結果驗證了所提電容電壓控制策略的有效性。

圖14 電容器組充電實驗結果Fig.14 Experiment results of voltage of capacitor bank charging

圖15 電容器變速實驗結果Fig.15 Experiment results of voltage of capacitor bank in speed step operation
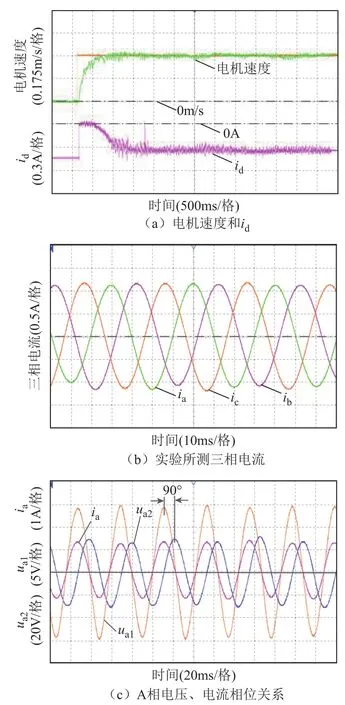
圖16 0.35m/s工況下實驗結果Fig.16 Experiment results of in 0.35m/s operation
圖 16為給定速度 0.35m/s時的實驗結果。圖16a包括 FMPML電機速度(上)、d軸電流(下)。可以看出,速度可以很好地跟隨給定并實現(xiàn)弱磁控制,弱磁電流約為 0.3A。圖 16b為實驗所測三相電流,三相電流對稱性良好,諧波含量較低,電流幅值約為1.1A。圖16c是FMPML電機的A相電壓、電流的相位關系,主逆變器A相電壓ua1與A相電流ia保持同相位,與電容逆變器A相電壓ua2保持90o相位差,因此無功電壓矢量與有功電壓矢量呈正交關系,實現(xiàn)了電機運行所需功率流的解耦,有功與無功功率分別由主逆變器和電容逆變器供給。從直流電源的角度來講,實現(xiàn)了電機系統(tǒng)的單位功率因數(shù)弱磁控制,減輕了直流電源的無功壓力。
圖17a所示為變速實驗結果,實驗中將速度給定值由0.2m/s變?yōu)?.35m/s。從圖17a中可以看出,經(jīng)過大約0.2s的時間,速度達到給定值,跟隨效果良好。由圖17b可以看出,變速前后系統(tǒng)均能工作于單位功率因數(shù)狀態(tài)。圖17c為d、q軸電流,可以看出變速前受定位力的影響,q軸電流波動較大,隨著速度的提升,q軸電流波動變小。這表明變速前后系統(tǒng)具有良好的可控性和穩(wěn)定性。
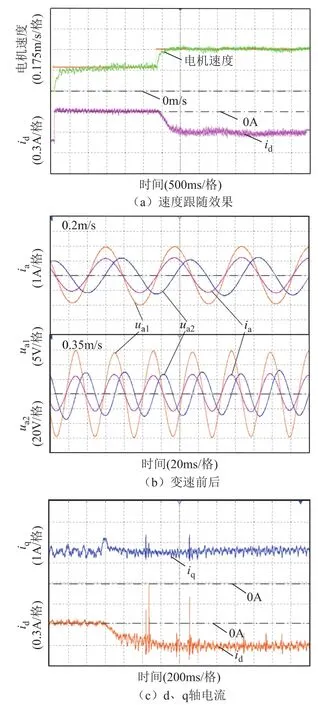
圖17 變速實驗結果Fig.17 Experiment results of altering speed
圖 18為速度極限實驗結果,在不采用反饋弱磁控制策略情況下,給定速度超出極限速度時無法跟隨,并有較大的脈動,驗證了所提弱磁策略的有效性。
以上實驗結果表明,電機在不同速度下,都能夠確保系統(tǒng)運行所需有功功率由主逆變器提供,所需無功功率由電容逆變器提供,且變速前后電流工作點均位于電流電壓極限圓內(nèi),驗證了所提控制策略的有效性。

圖18 系統(tǒng)極限速度實驗結果Fig.18 Experiment results of system limiting speed
5 結論
本文提出了開繞組磁場調(diào)制永磁直線電機的單位功率因數(shù)弱磁控制策略。該策略將弱磁與飛跨電容的功率因數(shù)補償特點相結合,拓寬電機系統(tǒng)的調(diào)速范圍。并且,考慮FMPML電機功率因數(shù)低的特點,在低速時,對電容器組進行充電,滿足無功功率補償?shù)男枰ㄟ^單位功率因數(shù)控制策略解耦電機功率流,降低直流母線的無功壓力,使驅動系統(tǒng)以單位功率因數(shù)運行。實驗結果表明,所提出的單位功率因數(shù)弱磁控制策略,實現(xiàn)單位功率因數(shù)控制和弱磁控制,擴展了電機控制系統(tǒng)的調(diào)速范圍。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
