電柜遠程上斷電系統的研發設計
2021-03-17 07:41:18沈宇浩黃立仁黃干將
科學技術創新 2021年5期
關鍵詞:設備
沈宇浩 施 怡 韋 文 黃立仁 黃干將
(廣西中煙工業有限責任公司,廣西 南寧530000)
1 概述
南寧卷煙廠制絲車間設備總電取用模式依然是傳統的斷路開關控制方式,在開班、收班、外網電壓異常波動時,需要維修電工行走至每一設備電柜進行上電、斷電、檢查工作,存在著效率低下、智能化程度低等現象,嚴重影響生產效率。
2 需求提出及解決思路
2.1 需求提出
(1)提升電柜上斷電效率的需求
現車間每次節假日收班時,需按照節能、安全管理要求,將車間設備動力電源全部斷開,開班時再上電。目前的操作方式為維修電工走到每一個主電柜面前按下斷電、上電按鈕,對每個區域段的設備進行逐一上斷電。平均一次收開班的斷電耗時約151min,上電耗時約217min 左右,由于上電后需檢查下端設備運行情況,因此上電比斷電耗時久屬正常現象。斷電耗時過長會延長收班日期。上電耗時過長會延后開班首天正常生產的時間,極大地影響了車間整體生產效率。
(2)上電后設備狀態智能診斷的需求
上電后人工耗費了大量的時間在下端設備狀態檢查上,耦合器故障、交換機未啟動兩項故障占比較高,如圖1 所示,經咨詢生產廠家羅克韋爾公司,得知該類電子元件在首次上電時有一定幾率自檢不通過,需重新上電自檢。目前這兩項故障檢測均是使用人工檢查的手段,尚未實現智能診斷,是下端設備狀態檢查耗時長的根本原因。
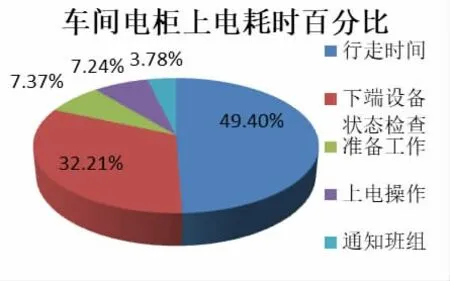
圖1 電柜上電耗時餅分圖
2.2 解決思路
為了滿足以上需求,提出“遠程上斷電”和“智能診斷”思路,將電柜上電方式由傳統的電柜按鈕開關上電轉變為遠程上電模式,將人工診斷模式轉變為設備智能診斷模式,以自動化、智能化[3]的方式有效減少在電柜上斷電過程中的人工時間,實現效率提升。電柜遠程上斷電系統按組成可分為:基礎硬件層、遠程控制層、智能診斷層三個部分,實現電柜遠程上斷電與上電后設備的智能自診斷。如圖2 所示。

圖2 系統設計框架
3 方案研究
3.1 基礎硬件層的選擇
(1)信號驅動源的選擇
驅動源主要是用作當上斷電信號產生時,發出24V 脈沖信號給控制電路,實現機構動作,要求信號發送準確:信號驅動源的電壓脈沖信號發送準確率=100%。
綜上所述,經過對PLC 控制器、遠程IO 模塊、單片機進行測試分析后。其中PLC 控制器發送準確率=100%,符合要求。所以采用PLC 控制器方案。
上電機構需要一定的儲能時間后才能夠實施上電動作,因此在選擇PLC 控制器為信號驅動源后,需要對信號驅動進行一定的延時處理,完成元件的儲能,不儲能或儲能不完全則元件無法動作。延時時間在滿足儲能動作正確率100%的情況下,時間越快越好。小組成員決定使用“黃金分割法”尋找元件儲能的脈沖延時時間。
按照人工上電使用經驗,在10s 內能夠完全滿足儲能要求,因此脈沖延時時間X 范圍在:0-10s 內選擇。
使用PLC 控制器在程序里分別設定不同的脈沖延時時間,每個時間值進行五組試驗,每組10 次,測試儲能后動作正確率,計時精確到0.1s。(動作正確率=正確次數/10*100%)
在6.2s 時脈沖延時時間最短,且儲能后元件動作正確率=100%,最終確定信號驅動的脈沖延時時間=6.2s。
(2)網絡傳輸介質的選擇
在確定PLC 控制器為信號驅動源后,PLC控制器需要與人機交互服務器進行通訊,由人機交互界面發出遠程控制指令,命令PLC 控制器驅動輸出。因此兩者的網絡傳輸介質需要滿足以下要求:百米網絡傳輸速率>12.5MB/s。
綜上所述,經過對六類網線、Profinet 四芯通訊線、光導纖維光纖[4]進行測試分析后。其中PLC 控制器發送準確率=100%,符合要求。所以采用PLC 控制器方案。
(3)服務器的選擇
服務器的作用是轉發現場控制器和人機交互界面的信號,使得控制邏輯在界面顯示,操作指令在控制器實現。需要滿足以下要求:網絡延遲滿足數據傳輸需求,網絡延遲平均≤1ms。
綜上所述,經過對獨立服務器、集控服務器、現場操作站進行測試分析后。其中集控服務器網絡延遲平均=0.5ms<1ms,符合要求。所以采用集控服務器方案。
3.2 遠程控制層的選擇
(1)網絡結構的選擇
網絡結構在實際工況下運行時,必須具備較強的抗干擾能力和自恢復能力,通過人工模擬加大數據負荷,至百兆網絡額定負荷的1.5 倍,測試過負荷通訊故障率與網絡故障自恢復時間。需要滿足以下要求:抗負荷能力:過負荷下通訊故障率≤5%。自恢復時間:單次網絡故障自恢復時間≤120s。
綜上所述,經過對星型、樹型、環型進行測試分析后。其中環型
過負荷通訊故障率=3%≤5%,自恢復平均時間=64s≤120s,符合要求。所以采用環型方案。
(2)網段的選擇
網段是用于設置PLC 控制器與服務器通訊IP 地址,保證兩者處于同一通訊段中,進行數據交互。網段的選擇有如下要求:網絡安全性,生產工藝網段應與外網有物理隔離。兼容性,網段地址與PLC 控制器、服務器網卡設置地址應能100%兼容。
綜上所述,經過對設備網、主機網、控制網進行測試分析后。其中設備網之間通訊使用的網段與外網物理隔離,網段處于IP網段內,符合要求。所以采用設備網方案。
3.3 智能診斷層的選擇
(1)診斷模式的選擇
診斷模式主要應用于在電柜上電后,診斷下端設備狀態是否正常,要求誤診斷率≤5%。誤診斷率=誤診斷次數/總上電次數*100%。
綜上所述,經過對收發診斷、自檢診斷、組態診斷進行測試分析后。其中收發診斷誤診斷率=1.2%≤5%,符合要求。所以采用收發診斷方案。
收發診斷核心參數的確定:在收發診斷不同的參數條件下,統計誤診斷率,誤診斷率需<5%,且越低越好。因為該指標受到多因素的影響,小組決定通過正交試驗,尋找收發診斷的最佳核心參數,試驗過程數據如表1 所示。因素:響應時間(ms),掃描時間周期(ms),發送頻率(Hz)。選用正交表來做9 次試驗,確認收發診斷核心參數的設置為響應時間150ms,掃描時間周期250ms,發送頻率5Hz。
(2)報警方式的選擇
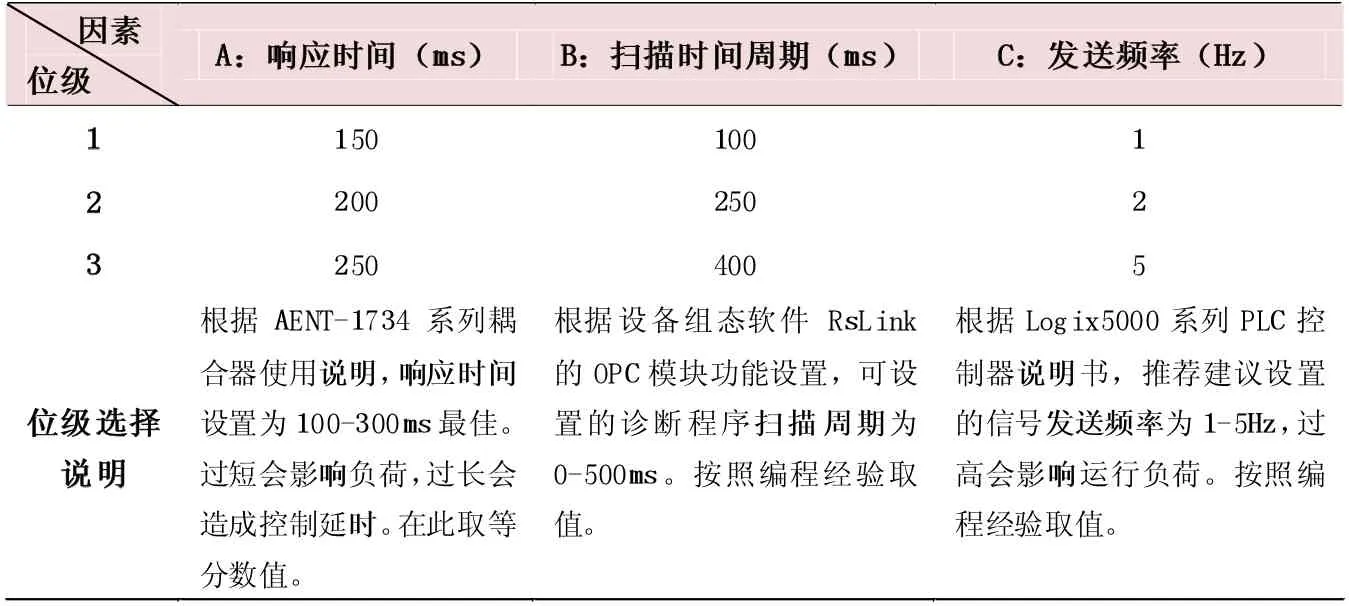
表1 正交試驗表
在系統診斷出上電后下端設備存在故障時,需發出報警提示現場維修電工,進行故障維修復位等操作,需滿足以下條件:報警準確率=100%。有效報警范圍≥50m2。
綜上所述,經過對聲光報警、系統軟件報警、組合報警進行測試分析后。組合報警準確率平均值=100%,有效報警范圍=64 m2≥50m2,符合要求。所以確定故障報警方式為組合報警。
4 方案實施過程
4.1 硬件部分
設置信號驅動源,在PLC 的輸出I/O 點進行接線,送至執行機構。敷設光導纖維光纖,安裝線路橋架,敷設光導纖維光纖。布置環形網絡結構,按環網線路進行光纖接頭熔接,制作聲光報警器裝置。
4.2 編程部分
部署服務器,配置服務器網卡,配置服務端數采驅動。設置交換機環網參數,制作IP 地址分配表,分配PLC 控制器及服務器IP 地址。在系統平臺制作交互畫面,部署至分散控制系統的操作站。編寫收發診斷程序,設置收發診斷核心參數。編寫軟件報警程序。
5 效果檢驗
使用新型電柜遠程上斷電系統后,上電流程發生了改變,減少了行走與下端設備檢查時間,上電時間總耗時減少至37.0min,效率提升了473%。
6 結論
本系統基于“遠程控制”和“智能診斷”的方式,降低了車間設備上電時間,有效解決了人工上電耗時長,人工診斷效率低的問題,其創新點在于:通過智能診斷的方式,有效解決了人工診斷效率低下、診斷不全的問題,可為各類工廠遠程控制系統提供借鑒。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
