基于改進天牛須算法的主汽溫控制系統PID參數優化
2021-03-17 06:22:08仝家朋華北電力大學自動化系河北保定071003
儀器儀表用戶 2021年3期
仝家朋(華北電力大學 自動化系,河北 保定 071003)
0 引言
PID控制因簡單可靠,在實際中應用非常廣泛。在智能PID參數整定方面,有基于蝙蝠算法的設計[1]、基于H2函數的粒子群算法的設計[2],優化方法眾多。本文將天牛須算法(Beetle Antennae Search,BAS)用于PID控制參數優化。改進了BAS,把改進BAS應用于電廠主汽溫控制系統PID參數優化中,并與粒子群算法、經驗公式法的PID參數優化結果進行對比。
1 天牛須算法
BAS的計算過程是對天牛覓食行為的模擬。當天牛進行覓食時,其覓食策略是根據左右側氣味濃度來移動,從而找到食物。天牛有兩只觸須,當左邊觸須感受出氣味濃度比右邊強時,天牛就向左移動,否則就向右移動[3]。受此啟發,食物氣味就相當于適應度函數,天牛感受食物氣味強度就相當于判斷適應度函數的大小,天牛找到食物就相當于找到了全局最優值。
用公式描述BAS的覓食策略:用一個N維向量表示天牛的質心,天牛的兩須位于質心的兩側,天牛的步長step與兩須之間距離d的比值為一個固定值。天牛飛到下一步后,頭的朝向是隨機的,即右須指向左須的方向向量是隨機的,定義如下:

式(1)中,rands(·)為隨機函數;k代表空間的維度。獲得方向向量后,定義左右須的位置如下:

式(2)、式(3)中,xl與xr分別為左右須的位置;xt為t時刻天牛的質心位置;d t為t時刻兩須間距。此時便可以確定下一刻天牛的運動方向和距離,如下式所示:

式(4)中,f(·)為被優化函數;δt是t時刻的搜索步長。初始時,大步長方便進行全局搜索,然后逐步減小步長值以進行精細搜索,如公式(5)所示:

式(5)中,g為迭代時步長的衰減系數。
在實際應用中,兩須間的距離d t可隨步長δt調整,如式(6)所示:

式(6)中,c為常數。
BAS的計算流程如下:①天牛初始位置為隨機值;②用公式(1)和公式(5)更新須子方向和步長;③用公式(2)、公式(3)確定兩須位置;④計算兩須適應度值;⑤用公式(4)判斷下一刻移動方向,更新天牛位置并計算新適應度值;⑥若循環到最大迭代次數或得到期望適應度值,則結束迭代過程,否則轉回②,繼續迭代。
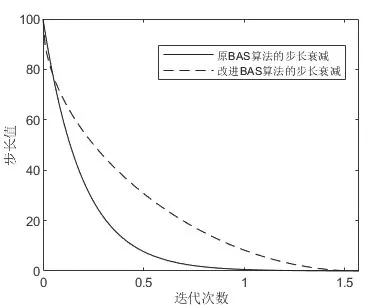
圖1 改進前后BAS的步長下降趨勢Fig.1 Declining step of BAS and improved BAS
2 BAS的改進
本文從兩個角度對BAS進行改進:改進原BAS的步長衰減;加入了變異環節。
2.1 改進原BAS的步長衰減
原BAS是使用步長的固定衰減系數進行迭代,造成前期步長衰減過快、搜索精度低,中、后期步長衰減過慢、局部搜索效率慢[4]。經過多次試驗,本文將原來的步長衰減公式變為式(7)的形式:

式(7)中,δt代表第t次迭代時的步長;δstart代表初始步長;tmax代表最大迭代次數。這樣改進BAS與原BAS的步長下降的趨勢如圖1所示(設定δstart為100,tmax為158)。
從圖1可看出,改進BAS的步長衰減在前期由快變緩,從而進行更多次大范圍的搜索,更利于找到全局最優值的鄰域;中期衰減較快,有利于算法快速縮小查找范圍;后期衰減變慢,使算法查找更為精準。經實驗測試,此下降趨勢比原來的更符合算法需要。
2.2 加入變異環節
多次實驗發現原BAS進行到最后階段,其查找方式不足以找到最合適的最優值,常常陷于局部最優值。
本文在BAS中加入了變異環節,在算法的最后階段發揮作用。該變異環節為:當步長值衰減到一定長度h時(即δt>h時),算法中生成一個隨機數作為概率,當概率小于一定值o的時候,公式(6)中的d t將按照公式(8)進行計算:

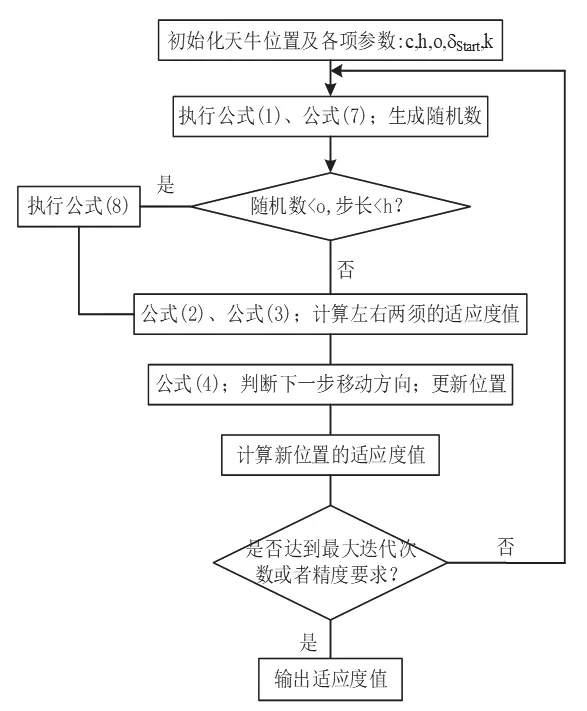
圖2 改進BAS的計算流程Fig.2 Computing flow of improved BAS
式(8)中,rand(·)為隨機函數。
該方法可以使算法擁有跳出局部最優的能力,擴大針對最終全局最優值的搜索范圍。
2.3 算例測試
兩次改進后,BAS計算流程如圖2所示。
為了對比改進前后BAS的尋優效果,本文選取了8個測試函數來對算法進行測試[5]。這8個測試函數f1~f8分別為:Sphere、Rosenbrock、Rastrigin、Schaffers、Schwefel P2.26、Alpine、Ackley、Griewank。8個測試函數中前兩個是單峰函數,可以檢測算法的收斂速度;后6個是擁有大量局部極值的多峰函數,可以測試算法的全局搜索能力。
函數測試時,原BAS設定為:須子間距與步距大小之比c為2.5,每次迭代后步距衰減系數g為0.95。改進BAS設定為:c為2.5,變異概率o為0.3,限制值h=0.00004。在測試時,函數維度都設為二維,原BAS與改進BAS參數尋優初始位置都設為(5,5),步距δt初始值設為這8個函數的定義域范圍兩端值相減后絕對值的3%。例如,Rosenbrock函數對應的步距初始值為(|30-(30)|×0.03)。測試時,每個函數都獨立運行100次,然后統計這100次結果的最好值、最差值、平均值、標準差,最多只統計到9位小數。迭代次數為3000時統計結果見表1,結果中的最好值加粗顯示;改進BAS與BAS對應在函數f3、f8最優值隨迭代次數的變化曲線如圖3、圖4所示。
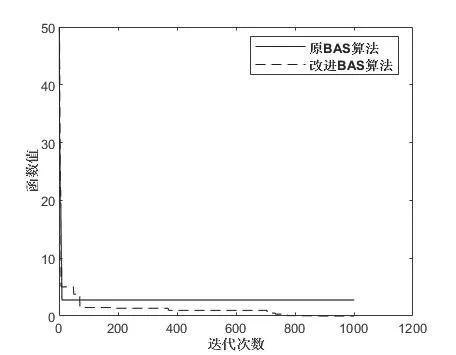
圖3 函數f3最優值隨迭代次數的變化曲線Fig.3 The curve of the optimal value of f3 follows the number of iterations
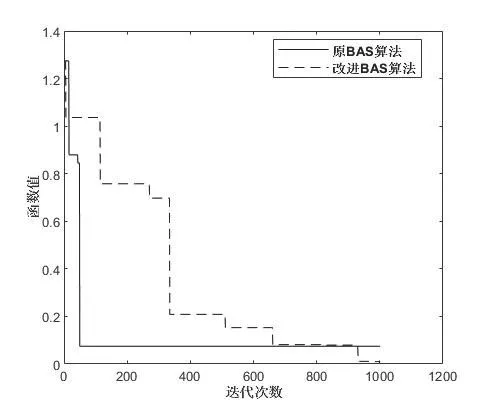
圖4 函數f8最優值隨迭代次數的變化曲線Fig.4 The curve of the optimal value of f8 follows the number of iterations
從表1可以看出,除了f1這樣較簡單的函數,其他函數上改進BAS都比BAS的表現好,更容易搜索到全局最優值且搜索效果更穩定。BAS在個別函數上最好值一項中能找到最優值0,但效果太不穩定,其對應的最差值表現的也更為不好,標準差較大。在這一點上改進BAS表現很好,而且隨著迭代次數的增加,改進BAS的搜索結果也更好。從圖3、圖4中可以看出工作時改進BAS比BAS下降更快,搜索更快。
3 BAS優化主汽溫系統PID參數
某電廠的主汽溫控制系統[6]結構如圖5所示,內回路采用PI控制,即比例積分控制器,外回路也采用PI控制,R為給定值。
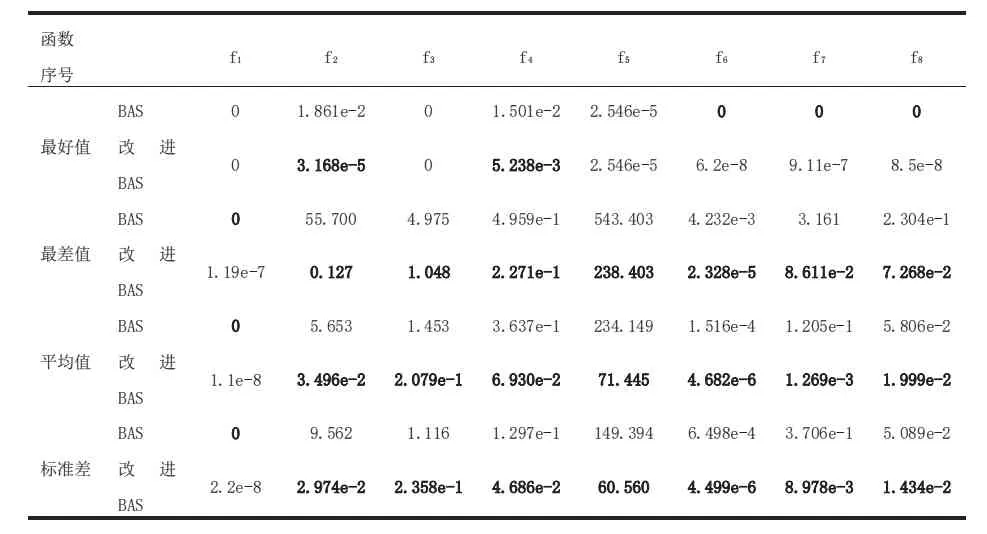
表1 迭代3000次時測試結果Table 1 Test results at 3000 iterations
以該控制系統為測試系統。內環控制器參考前人的控制方式,其傳遞函數為kp1+ki1/s,其中kp1=10,ki1=0.0128;外環控制器的傳遞函數為kp+ki/s,使用改進BAS對外環控制器中的參數kp和ki進行尋找最優值,并與粒子群算法優化PID參數的方式、經驗公式法設置PID參數的方式來進行對比。目標函數為能反映系統調節品質的絕對誤差一階矩積分ITAE,即:

利用經驗公式法(臨界比例度法)整定出的基本參數:kp=0.7399,ki=0.001327。
粒子群算法的設定為:迭代次數為100,設140個粒子,c1和c2均為1.4,慣性權重ω為0.7,單個粒子的維度為2,系統仿真時間為3000s,仿真步距為1s,最大速度Vmax為1,最小速度Vmin為-1,kp參數的尋優范圍為[0,1],ki參數的尋優范圍為[0,1]。
改進BAS的設定為:迭代次數為2500,須子間距與步距的大小之比c為2.5,個體的維度為2,系統仿真時間為3000s,仿真步距為1s,kp參數的尋優范圍為[0,1],ki參數的尋優范圍為[0,1],步距δt初始值設為0.3,限制值h為0.00004,變異概率o為0.15。
基本BAS的設定值:迭代次數為2500,須子間距與步距的大小之比c為2.5,個體的維度為2,系統仿真時間為3000s,仿真步距為1s,kp參數的尋優范圍為[0,1],ki參數的尋優范圍為[0,1],步距δt初始值設為0.3,每次迭代后步距的衰減系數g為0.95。
本文基于Matlab2018a仿真平臺來驗證其有效性,電腦主頻為2.60GHz,內存為8.00GB,CPU為i7-4720HQ。測試時,每個算法都獨立運行100次,然后統計這100次結果的最好值、最差值、平均值、標準差,最多只統計到9位小數;另外,還統計這100次中在上升時間、超調量、調節時間3個指標上改進BAS比PSO好的情況。統計結果見表2,結果中的最好值加粗顯示,經驗公式法的標準差不進入比較,且經驗公式的算法用時不進行測量。
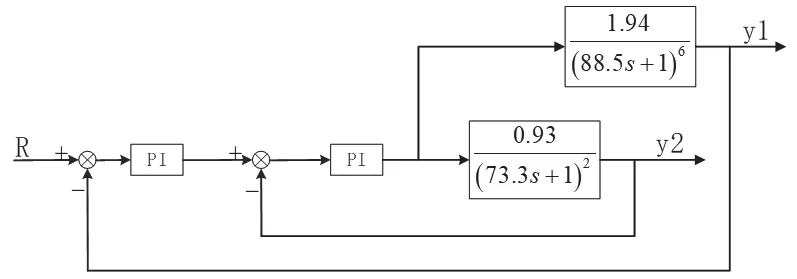
圖5 主汽溫控制系統結構圖Fig.5 Structure drawing of main steam temperature control system
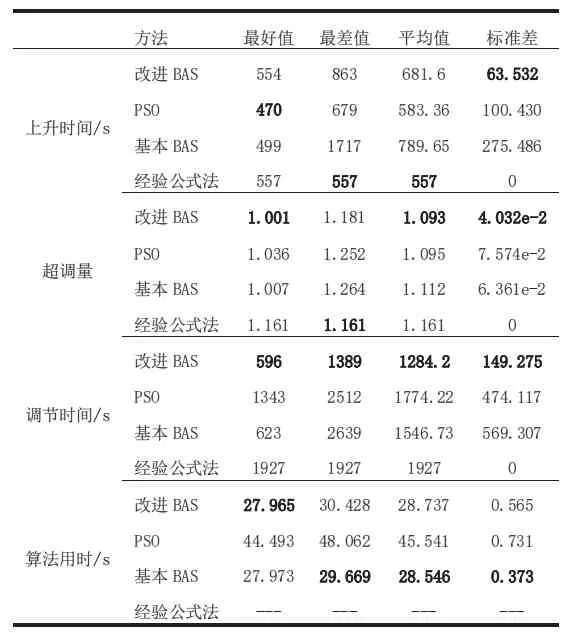
表2 4種算法的測試結果Table 2 Test results of four algorithms
從表2可以看出:經驗公式法對應的響應曲線表現最差,其上升時間雖然短,但是超調量和調節時間都比較大;BAS算法對應的響應曲線最不穩定;改進BAS法對應的響應曲線的上升時間平均值比PSO法的略大一點,超調量平均值和PSO法的較為接近,但調節時間平均值比PSO法的要好,而且改進BAS對應的響應曲線在多次試驗時表現更穩定。而在這100次中,改進BAS對應的響應曲線3個指標均比PSO好的情況發生了4次,其有兩個指標比PSO好的情況發生了49次,只有一個指標比PSO好的情況發生了47次;在49次中,改進BAS對應的上升時間和超調量更好的情況發生了3次,上升時間和調節時間更好的情況發生了23次,超調量和調節時間更好的情況發生了23次。另外,從算法用時的角度看,改進BAS法的優化用時接近PSO法用時的一半(PSO算法此時迭代次數已到最少,再少則沒有此時的搜索效果),較為可觀。綜上所述,改進BAS法優化控制器參數后,控制器表現更好,響應曲線表現更穩定,而且更有利于在算力較弱的設備上使用,更有利于在硬實時要求的環境中使用。
4 結論
本文在BAS的基礎上進行改進,改變了原來的步長衰減趨勢,在局部搜索時加入了變異環節。在主汽溫系統控制器參數尋優后,改進BAS法對應的響應曲線表現更好,在3個指標上各有更好的優勢。同時大幅度減少尋優用時,更有利于在算力較弱的設備上使用。當然,改進后的BAS也存在一些不足,較為明顯的則是改進的BAS在高維度空間表現不佳。其進一步的改進方向可以為加入某些環節來增強該算法在高維度空間的搜索效果。
