風機的防喘振控制及優化淺析
2021-03-17 06:22:08丁理格
儀器儀表用戶 2021年3期
關鍵詞:閥門
李 雁,丁理格,黃 愿,陳 俊
(1.中石油西南油氣田公司 川東北作業分公司,四川 達州 635000;2.重慶精本科技發展有限公司,重慶 400000)
0 引言
天然氣凈化廠每套裝置包含脫硫單元、脫水單元、硫磺回收單元和尾氣處理單元,硫磺回收和尾氣處理單元通常配備兩用一備風機,滿足燃料爐空氣供給。為有效利用硫磺回收和尾氣處理單元燃燒爐產生的中壓蒸汽降低裝置的電耗量,在硫磺回收及尾氣處理裝置各自配備兩臺中壓蒸汽透平風機、一臺電機驅動風機以滿足燃料爐空氣供給,正常生產時投用兩臺中壓蒸汽透平風機,電機驅動風機作為備用。倘若風機在工作過程中出現喘振,風機及相連接管道將產生大幅振動,造成設備損害。同時,影響硫磺回收和尾氣處理單元的正常運行,風機的防喘振控制及優化就成為裝置穩定運行的關鍵因素之一。
1 風機喘振原因
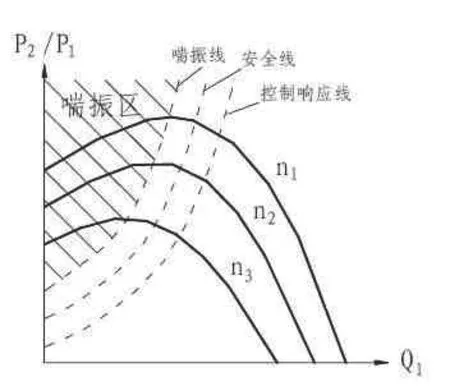
圖1 喘振線、安全線與控制響應線Fig.1 Surge line, safety line and control response line
風機的喘振是風機的固有現象,風機啟動時入口導葉逐漸增大,風機出口空氣壓力逐漸增大。由于供給總管的空氣一般是由兩臺甚至多臺風機提供,在此過程中出口空氣壓力如果大于總管空氣壓力則向空氣總管供風,如果出口空氣壓力小于總管空氣壓力則空氣總管的空氣會倒回至風機,如此反復則會出現風機的喘振。從風機監控的數據可以看出:此時振動監測值增高,如果防喘振閥門不能及時動作則會導致風機聯鎖停機、機械損傷。從圖1風機的喘振線、安全線與控制響應線可以看出:防喘振控制的目的是防止風機進入喘振區,通過將風機工作點控制在安全線以內以確保風機的穩定運行。
2 風機防喘振控制系統設計
2.1 風機防喘振控制系統硬件配置
為滿足風機防喘振控制系統的精確控制,PLC系統選用西門子S7-300控制系統,性能優良、性價比高。S7-300是模塊化的PLC,可以根據需要自由組合模塊,可拆的模塊前面板接線端子易于維護。S7-300有350多條指令,其編程軟件STEP 7功能強大,支持梯形圖、功能圖、STL等編程語言,完全滿足風機的防喘振控制編程要求。風機防喘振控制系統硬件配置參見表1。
控制器采用CPU314C-2PN/DP,該CPU包含兩個通信接口:MPI/DP和PROFINET(PN)接口。MPI/DP接口可與現場觸摸屏連接,方便現場人員進行風機數據的監視與控制;PROFINET(PN)接口可與中控的工程師站進行連接,方便遠程監控程序以及與DCS系統進行modbus通訊,有利于數據的整合與遠程控制位于現場的風機。
2.2 風機防喘振控制系統的實現
當風機即將進入喘振區時,防喘振閥應迅速開啟,然而隨著防喘振閥的開啟,工作點將回到防喘振線的下方,此時防喘振閥在關閉過程中又應放慢,即要求在打開、關閉防喘振閥的過程中,所用的速度是不一樣的。由于PLC編程的靈活性,通過其內置的STL編程語言可以對防喘振閥控制參數進行實時修改以滿足防喘振閥的快開慢關要求。典型的設置就是通過修改PID的積分時間和增益,積分時間修改的順控邏輯及STL代碼實現如下:
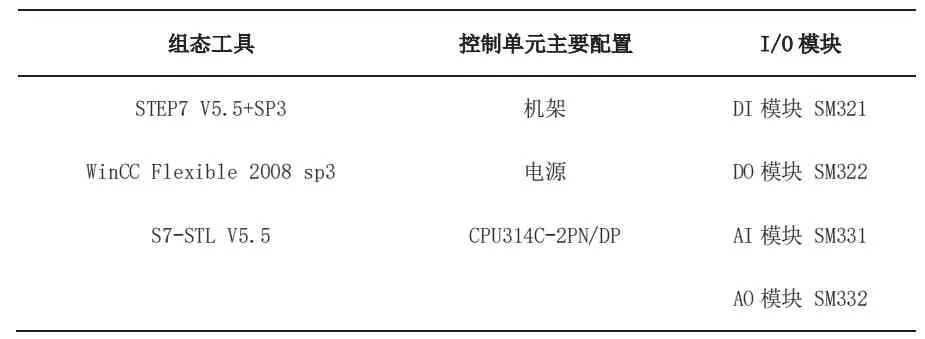
表1 防喘振控制系統硬件配置Table 1 Hardware configuration of anti surge control system

圖2 快開慢關變積分防喘振控制順控邏輯及STL代碼實現Fig.2 Sequence control logic and STL code implementation of integral anti surge control with fast on and slow off
風機防喘振的軟件實現采用模塊化程序的設計方法,分別由模擬量的輸入/輸出處理模塊、防喘振控制曲線、PID調節控制等部分組成,如圖3所示。其中,將測量到的入口流量差壓進行補償運算后,所得的流量值經過折線運算后得到的能量頭作為PID控制的設定值SP,通過風機進口的空氣壓力、溫度,及出口空氣壓力計算得到的能量頭作為PID的PV。防喘振控制的偏差:e = PV-SP,即為能量頭的控制偏差。當風機正常工作時,則它的運行點應該在圖1中防喘振線的下方,此時偏差e>0;若運行點在防喘振線的上方,此時偏差e≤0,則控制防喘振閥具有一定開度。
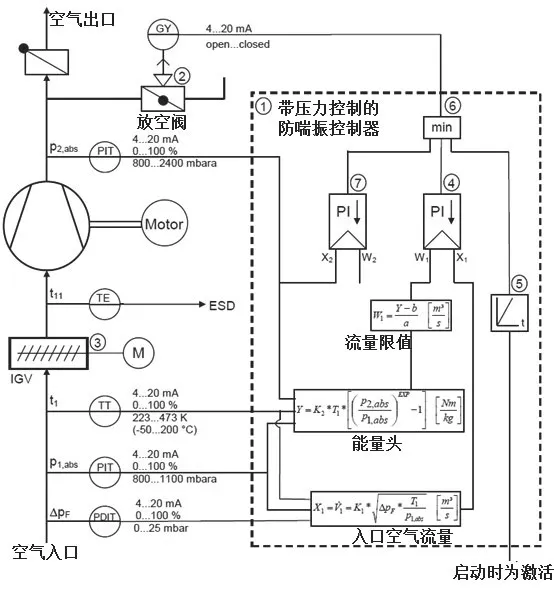
圖3 防喘振控制系統框圖Fig.3 Block diagram of anti surge control system
防喘振控制系統主要由進口空氣壓力、進口空氣溫度、進口流量、出口空氣壓力和防喘振閥組成。防喘振控制系統框圖如圖3所示。
防喘振控制根據圖3的方案進行設計。防喘振控制器是具有連續輸出信號的數字多分量控制器。該輸出信號作用于防喘振放空閥的定位器,當控制器或驅動源發生故障時,通過閥門打開,實現故障安全行為。
根據圖1的防喘振控制系統框圖,向控制器提供傳感器的模擬信號。當前工作點通過以下公式計算:
入口空氣流速:

式(1)中:?PF ——入口空氣流量差壓;T1——進口空氣溫度;P1abs ——進口空氣壓力。
能量頭測量值:

式(2)中:t1——進口空氣溫度 P1;abs——進口空氣壓力P2;abs——出口空氣壓力。
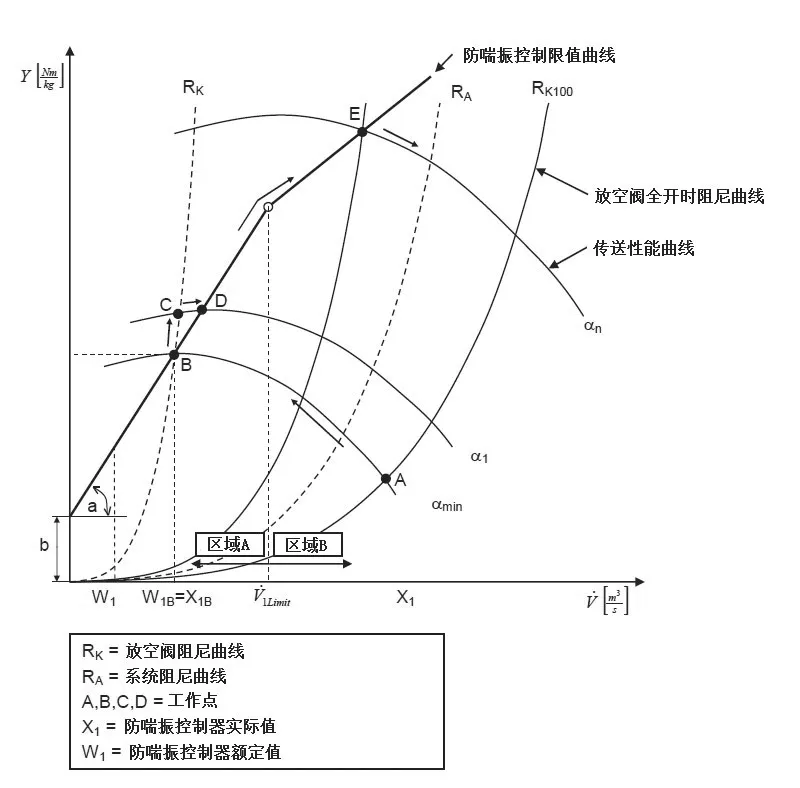
圖4 防喘振控制工作點移動原理圖Fig.4 Schematic diagram of anti surge control working point movement
能量頭設定值:

式(3)中:a——防喘振控制線斜率;b——防喘振控制線截距。
風機在不同的防喘振工作區域,它的防喘振控制限值曲線不同,能量頭設定值對應的a、b值也不同。風機的防喘振控制分成兩部分,根據出廠風機參數可知:

根據能量頭測量值計算公式,計算出當前能量頭測量值。根據入口空氣流速與V1Limit(V1Limit在風機出廠時給定,不同的風機V1Limit值不同)相比,在不同的防喘振區域可計算出當前能量頭測量值對應的防喘振設定值。當能量頭測量值超過能量頭設定值時,風機將進入喘振區,此時應控制防喘振閥打開,以降低能量頭測量值,將風機控制在正常工作區內。風機處于正常工作區時,防喘振閥逐漸關閉實現風機效能的最大化。風機防喘振控制工作點移動圖如圖4所示。
當壓縮機啟動時,入口導葉閥IGV處于最小開啟位置αmin(速度控制時的最小速度)。在此過程中,防喘振放空閥打開。機組加速后達到第一個工作點A,如圖4所示。防喘振控制器被激活,時間斜坡開始。通過該可調斜坡,可確保控制器通過最小選擇關閉防喘振放空閥的速度不會太快。
當防喘振放空閥關閉時,壓縮機的系統阻力增大。這導致沿入口導葉閥IGV傳送性能曲線αmin的工作點發生變化,可能達到點B。控制器接管防喘振放空閥的控制,并且通過最小值選擇啟動斜坡將變得無效。當入口導葉閥IGV從αmin打開到α1時,假定的恒定阻尼曲線(RK)操作點B將移到C。超過控制極限曲線會導致控制器的控制偏差,從而導致防喘振放空閥打開。因此,工作點D可能位于控制極限曲線上。當進一步打開入口導葉閥IGV時,重復此程序,直到止回閥朝系統方向(工作點E)打開,將設備阻力曲線(RA)向右移動,遠離控制性能曲線。
在壓縮機運行期間,喘振控制裝置隨時準備好切入,以便在出現任何運行故障時立即打開防喘振放空閥。通過限位控制器打開防喘振放空閥,限制排放側的絕對壓力p2max,abs。
防喘振控制在壓縮機停止后關閉,防喘振放空閥自動打開。
3 風機防喘振控制系統優化
風機防喘振控制系統優化的目的是充分發揮風機的效能,將風機出口的壓縮空氣全部送進燃燒系統。從表面上看就是防喘振閥門在風機正常運行時處于全關,燃燒系統供風壓力、流量滿足燃燒要求。從控制系統的角度出發可以從以下兩個方面進行防喘振控制系統的優化。
3.1 風機進口風速的計算
根據防喘振控制理論,進口空氣風速決定了風機防喘振的控制模式:流量控制、出口壓力控制。根據入口空氣流速的計算公式:可以看出:入口空氣流速在入口空氣流量差壓、入口空氣溫度、入口空氣壓力測量準確的情況下,可以修正的參數為K1,通過對K1的修正觀察計算出的進口空氣風速與該管線上另外一個聯鎖控制的風機入口空氣流量,兩者之間的差值應在可接受的范圍內。同時,監控風機防喘振閥的開度曲線,確保風機運行正常。
3.2 風機防喘振PID參數的優化
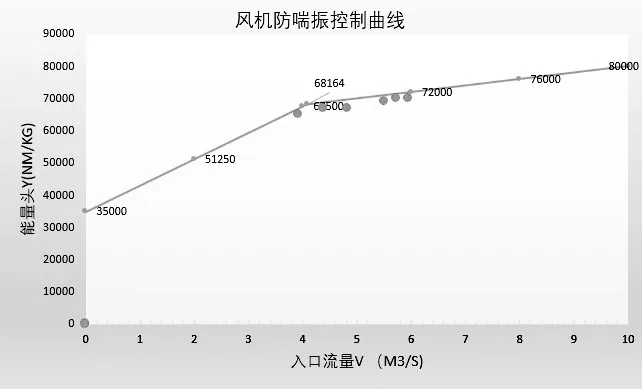
圖5 防喘振優化控制曲線Fig.5 Anti surge optimization control curve
防喘振閥的動作通過PLC控制系統的PID功能塊進行控制,通過PID參數的變積分設置確保了在能量頭的設定值與反饋值相差過大,PID輸出快速動作,能量頭的設定值與反饋值接近時,PID輸出動作減緩。在運行中為保護防喘振閥門,減少防喘振閥門不必要的動作同時兼顧防喘振閥門的快開慢關特點,可通過設置PID死區來減少防喘振閥門不必要的動作。
經過系統優化后,風機的能量頭控制在能量頭控制線附近,防喘振控制曲線如圖5所示。
4 結論
風機的穩定運行對燃燒爐的穩定燃燒起著至關重要的作用,風機的防喘振控制復雜,工作人員只有充分理解其控制原理,結合風機自身特點才能制定出切實有效的優化方案。本裝置的風機經過優化后,運行效果良好,沒有再次出現因為風機的喘振導致燃燒爐停爐,為工廠的保質、保量運行提供了堅實的基礎。
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:10
流程工業(2022年3期)2022-06-23 09:41:08
流程工業(2022年3期)2022-06-23 09:41:02
流程工業(2022年3期)2022-06-23 09:40:50
流程工業(2022年5期)2022-06-23 07:19:22
流程工業(2022年5期)2022-06-23 07:19:16
中國核電(2021年3期)2021-08-13 08:57:02
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
智富時代(2018年5期)2018-07-18 17:52:04
