基于增強(qiáng)現(xiàn)實(shí)的手術(shù)導(dǎo)航系統(tǒng)快速標(biāo)定算法
2021-03-18 13:45:44
計(jì)算機(jī)應(yīng)用 2021年3期
(上海交通大學(xué)機(jī)械與動(dòng)力工程學(xué)院,上海 200240)
0 引言
隨著計(jì)算機(jī)圖形學(xué)和醫(yī)學(xué)影像分析技術(shù)的發(fā)展,增強(qiáng)現(xiàn)實(shí)(Augmented Reality,AR)技術(shù)已成為計(jì)算機(jī)應(yīng)用領(lǐng)域的研究熱點(diǎn)之一,在治療指導(dǎo)[1]、患者康復(fù)[2]、手術(shù)導(dǎo)航[3]等方向發(fā)展迅速。光學(xué)半透式頭戴顯示器(Optical See-Through Head-Mounted Display,OST-HMD)在增強(qiáng)現(xiàn)實(shí)中應(yīng)用廣泛,它可以為用戶提供在不同場(chǎng)景下身臨其境的體驗(yàn)。許多可穿戴顯示設(shè)備已被用于醫(yī)療用途,如谷歌眼鏡(公司為Google,CA)[4]、Optinvent(公司為Rennes,F(xiàn)rance)[5]、Vuzix M300(公司為Vuzix,Rochester,NY)[6]和HoloLens(公司為Microsoft Corporation,Redmond)[7]。
在增強(qiáng)現(xiàn)實(shí)輔助手術(shù)和介入治療領(lǐng)域中,有很多基于Microsoft HoloLens 的嘗試。在不可逆電穿孔(IRreversible Electroporation,IRE)中,利用HoloLens 在目標(biāo)區(qū)域顯示超聲二維圖像來(lái)對(duì)電極針消融進(jìn)行引導(dǎo)。文獻(xiàn)[8]中提到用手眼標(biāo)定來(lái)計(jì)算光學(xué)跟蹤系統(tǒng)和HoloLens 坐標(biāo)系之間的轉(zhuǎn)換,但并未提及系統(tǒng)的精度。在骨科手術(shù)中,Gibby 等[9]通過(guò)半透式頭盔中的三維手術(shù)路徑來(lái)引導(dǎo)椎弓根螺釘?shù)闹萌耄翘摂M路徑和脊椎模型之間的對(duì)齊是靠手動(dòng)實(shí)現(xiàn)的。石磊等[10]在肝癌切除手術(shù)中使用HoloLens 進(jìn)行手術(shù)規(guī)劃和術(shù)中引導(dǎo),但虛擬模型與術(shù)中靶器官的匹配也是手動(dòng)實(shí)現(xiàn)的。于德旺等[11]利用Vuforia 插件對(duì)比了識(shí)別圖注冊(cè)、三點(diǎn)注冊(cè)和手動(dòng)注冊(cè)方法,通過(guò)實(shí)驗(yàn)驗(yàn)證三種方法的平均誤差值為4.16 mm。Hajek等[12]使用兩臺(tái)HoloLens 配合實(shí)現(xiàn)了閉環(huán)校準(zhǔn),一臺(tái)由用戶佩戴,另一臺(tái)固定在C 臂機(jī)上作為定位裝置。通過(guò)手眼標(biāo)定估計(jì)了C 臂機(jī)到HoloLens 的轉(zhuǎn)換矩陣,并借助即時(shí)定位與地圖構(gòu)建算法(Simultaneous Localization And Mapping,SLAM)在同一世界坐標(biāo)系中標(biāo)記這兩臺(tái)HoloLens,最終建立錐形束計(jì)算機(jī)斷層掃描(Cone-Beam Computed Tomography,CBCT)坐標(biāo)系到虛擬坐標(biāo)系之間的映射,該方法在定位上的均方根誤差為26.6 mm。在文獻(xiàn)[13]中,將視覺(jué)標(biāo)記物固定在骨盆模型上,通過(guò)超聲和光學(xué)跟蹤器的融合實(shí)現(xiàn)了虛擬基準(zhǔn)點(diǎn)和骨盆上真實(shí)基準(zhǔn)點(diǎn)的重合,該方法的目標(biāo)配準(zhǔn)誤差(Target Registration Error,TRE)為36.90 mm。除了上述應(yīng)用,還有基于Vuforia軟件開(kāi)發(fā)工具包(Software Development Kit,SDK)利用HoloLens 的RGB 攝像機(jī)進(jìn)行目標(biāo)跟蹤的方法。在Frantz等[14]的工作中,通過(guò)Vuforia 專有的特征檢測(cè)算法對(duì)一個(gè)已知的RGB 圓柱進(jìn)行識(shí)別,因此圓柱需要保持在攝像機(jī)狹窄的視野內(nèi)且相對(duì)目標(biāo)物體保持靜止,該方法配準(zhǔn)目標(biāo)點(diǎn)的二維表面定位誤差為1.92 mm。在半透式頭戴顯示器的相關(guān)應(yīng)用中,OST-HMD 中的虛擬物體與物理現(xiàn)實(shí)之間的對(duì)齊一直是個(gè)難題。
從現(xiàn)有工作可知,目前增強(qiáng)現(xiàn)實(shí)在外科手術(shù)導(dǎo)航領(lǐng)域的相關(guān)研究無(wú)法滿足臨床應(yīng)用的精度要求。此外,現(xiàn)有的標(biāo)定方法操作步驟較為繁瑣,無(wú)法做到快速對(duì)增強(qiáng)現(xiàn)實(shí)設(shè)備進(jìn)行標(biāo)定并實(shí)現(xiàn)虛實(shí)融合。針對(duì)上述問(wèn)題,本文提出了一種快速、準(zhǔn)確的OST-HMD標(biāo)定算法。該標(biāo)定方法更加友好,用戶只需保持虛擬標(biāo)記點(diǎn)在HMD 的視野中,并調(diào)整探針的位置即可完成標(biāo)定。該方法通過(guò)3D-3D 映射直接求解OST-HMD 的虛擬坐標(biāo)系到光學(xué)追蹤系統(tǒng)的轉(zhuǎn)換矩陣,且不需要對(duì)HMD 內(nèi)部的投影矩陣進(jìn)行修改,因此任何支持顯示三維物體的光學(xué)半透式頭戴設(shè)備都可使用該方法。很少有人將虛擬空間到真實(shí)場(chǎng)景的3D-3D 映射方法應(yīng)用到手術(shù)導(dǎo)航系統(tǒng)中,本文的工作為這種方法提供了一個(gè)參考流程,在此基礎(chǔ)上開(kāi)發(fā)了基于AR的手術(shù)導(dǎo)航系統(tǒng)并進(jìn)行了精度驗(yàn)證實(shí)驗(yàn)。在該系統(tǒng)的引導(dǎo)下,醫(yī)生可以在特定的手術(shù)靶區(qū)按照三維術(shù)前規(guī)劃進(jìn)行操作,無(wú)需將視線在手術(shù)區(qū)域和傳統(tǒng)的顯示器之間移動(dòng),并且能夠在手術(shù)過(guò)程中動(dòng)態(tài)地驗(yàn)證手術(shù)結(jié)果。
1 相關(guān)工作
為了解決基于OST-HMD 的虛實(shí)融合問(wèn)題,需要對(duì)OSTHMD 進(jìn)行適當(dāng)?shù)臉?biāo)定以建立從物理現(xiàn)實(shí)到虛擬場(chǎng)景的映射關(guān)系。一種經(jīng)典的方法是單點(diǎn)主動(dòng)對(duì)準(zhǔn)方法(Single-Point Active Alignment Method,SPAAM)[15],這是一種基于二維圖像點(diǎn)與真實(shí)世界中三維點(diǎn)的對(duì)應(yīng)關(guān)系進(jìn)行的標(biāo)定。要獲得足夠的約束至少需要6 組對(duì)應(yīng)點(diǎn),用戶需要反復(fù)移動(dòng)頭部將顯示器中的二維光標(biāo)與現(xiàn)實(shí)世界中的三維點(diǎn)精準(zhǔn)地對(duì)齊。文獻(xiàn)[16]介紹了一種基于SPAAM 的改進(jìn)校準(zhǔn)方法以簡(jiǎn)化標(biāo)定過(guò)程。Qian 等[17]還提出了一種新的交互方式,通過(guò)部分固定用戶的頭部來(lái)降低半透式頭盔的自由度,這種方法可以減少人為因素引起的標(biāo)定誤差。上述方法均采用3D-2D的映射來(lái)解決HMD 的標(biāo)定問(wèn)題,這需要獲取并修改每個(gè)屏幕的投影矩陣。對(duì)于某些商用半透式頭戴顯示器來(lái)說(shuō),制造商只允許在用于顯示的三維坐標(biāo)系中進(jìn)行操作,無(wú)法得到屏幕的投影矩陣。在這種情況下,傳統(tǒng)的3D-2D 標(biāo)定方法不再適用。文獻(xiàn)[18]介紹了一種用于OST-HMD 校準(zhǔn)的3D-3D 方法,通過(guò)光學(xué)追蹤器對(duì)立方體進(jìn)行定位,并指導(dǎo)用戶通過(guò)移動(dòng)立方體以完成標(biāo)定,該方法的標(biāo)定平均誤差超過(guò)4 mm。此外,Owen 等[19]提出了頭戴顯示器相關(guān)標(biāo)定(Display-Relative Calibration,DRC)方法,引入光學(xué)模型并考慮了瞳孔間距,但該方法步驟復(fù)雜在實(shí)際應(yīng)用中有較大的局限性。基于眼球捕捉的無(wú)交互標(biāo)定方法也是一種潛在的解決方案[20],但目前相關(guān)的研究工作較少還有待進(jìn)一步的發(fā)展。
2 光學(xué)半透式頭戴顯示器標(biāo)定
2.1 OST-HMD的標(biāo)定算法描述
大多數(shù)OST-HMD 具有在自己的坐標(biāo)系統(tǒng)進(jìn)行三維顯示的功能,HoloLens由于在立體感知、任務(wù)負(fù)荷和刷新率方面的優(yōu)越性能[15]而成為本文的實(shí)驗(yàn)對(duì)象。為了使HoloLens中的虛擬內(nèi)容與現(xiàn)實(shí)世界中相應(yīng)的物體重合,必須建立從虛擬坐標(biāo)系到世界坐標(biāo)系的映射。換言之,本文的標(biāo)定方法是為了找到從OHoloLens到OTracker的變換矩陣,如圖1所示。
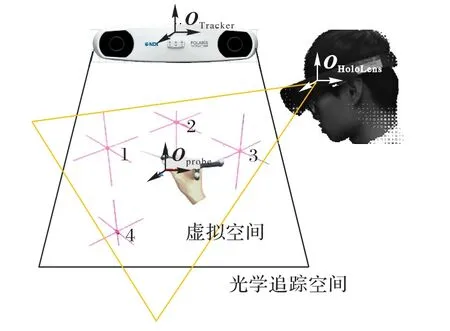
圖1 用戶正在佩戴HoloLens進(jìn)行標(biāo)定Fig.1 User is doing calibration with HoloLens
根據(jù)探針上的反光標(biāo)識(shí)物,光學(xué)跟蹤系統(tǒng)可實(shí)時(shí)獲得OProbe的位姿信息,由此獲取探針尖點(diǎn)OProbeTip在光學(xué)追蹤系統(tǒng)下的坐標(biāo)。為了簡(jiǎn)化表示,下面使用OProbe替代OProbeTip。用戶透過(guò)半透式顯示器能夠在視野中看到編號(hào)為1 到4 的三維正交軸(如圖1 所示),且這些正交軸的中心點(diǎn)在虛擬坐標(biāo)系中的位置是已知的。本文從立方體的非共面頂點(diǎn)中選擇這些標(biāo)記點(diǎn),可以提供足夠的約束來(lái)估計(jì)映射。相鄰標(biāo)記點(diǎn)之間的距離大于150 mm 以減少標(biāo)定時(shí)手部抖動(dòng)的影響。當(dāng)探針尖端與虛擬標(biāo)記點(diǎn)在視野中重合時(shí),記錄此時(shí)標(biāo)記點(diǎn)在虛擬坐標(biāo)系下的位置pi和探針尖點(diǎn)在光學(xué)跟蹤系統(tǒng)下的位置qi(i=1,2,3,4),由此得到兩組有序的3D點(diǎn)集。
2.2 OST-HMD的標(biāo)定矩陣求解
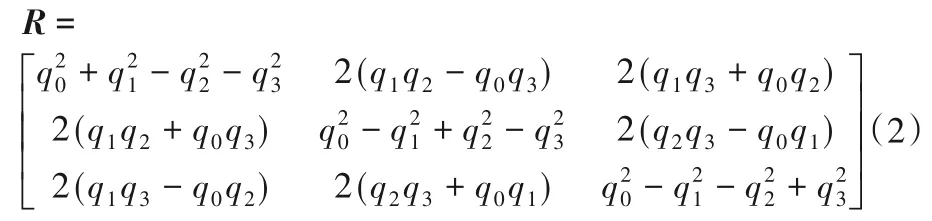
最小二乘擬合[21]、迭代最近點(diǎn)(Iterative Closest Point,ICP)[22]等經(jīng)典算法都可用于估計(jì)兩個(gè)三維點(diǎn)集之間的映射問(wèn)題,這里注意到pi和qi之間存在一一對(duì)應(yīng)關(guān)系,因此可采用單位四元數(shù)方法[23]或?qū)ε妓脑獢?shù)方法[24]以提高估計(jì)的精度。若qR表示的四元數(shù)如式(1)所示:

其中:q0≥0并且若將齊次變換矩陣中的平移部分記作T,旋轉(zhuǎn)矩陣記作R,則R可以表示為:
由此可以將求解兩個(gè)點(diǎn)集之間的映射問(wèn)題轉(zhuǎn)換為重投影誤差函數(shù)的優(yōu)化問(wèn)題:

該優(yōu)化問(wèn)題的解就是HoloLens的虛擬空間到光學(xué)追蹤空間的轉(zhuǎn)換矩陣的最優(yōu)估計(jì),可以表示為:

3 基于AR的手術(shù)導(dǎo)航系統(tǒng)
3.1 AR手術(shù)導(dǎo)航系統(tǒng)的功能概述
本文在課題組原有導(dǎo)航系統(tǒng)BeiDou-SNS[25]的基礎(chǔ)上增加了新的模塊,提供OST-HMD 的標(biāo)定功能以及PC 與HoloLens 之間的雙向通信,設(shè)計(jì)了基于AR 的手術(shù)導(dǎo)航系統(tǒng)。該系統(tǒng)主要包含以下5個(gè)模塊,軟件界面如圖2所示。
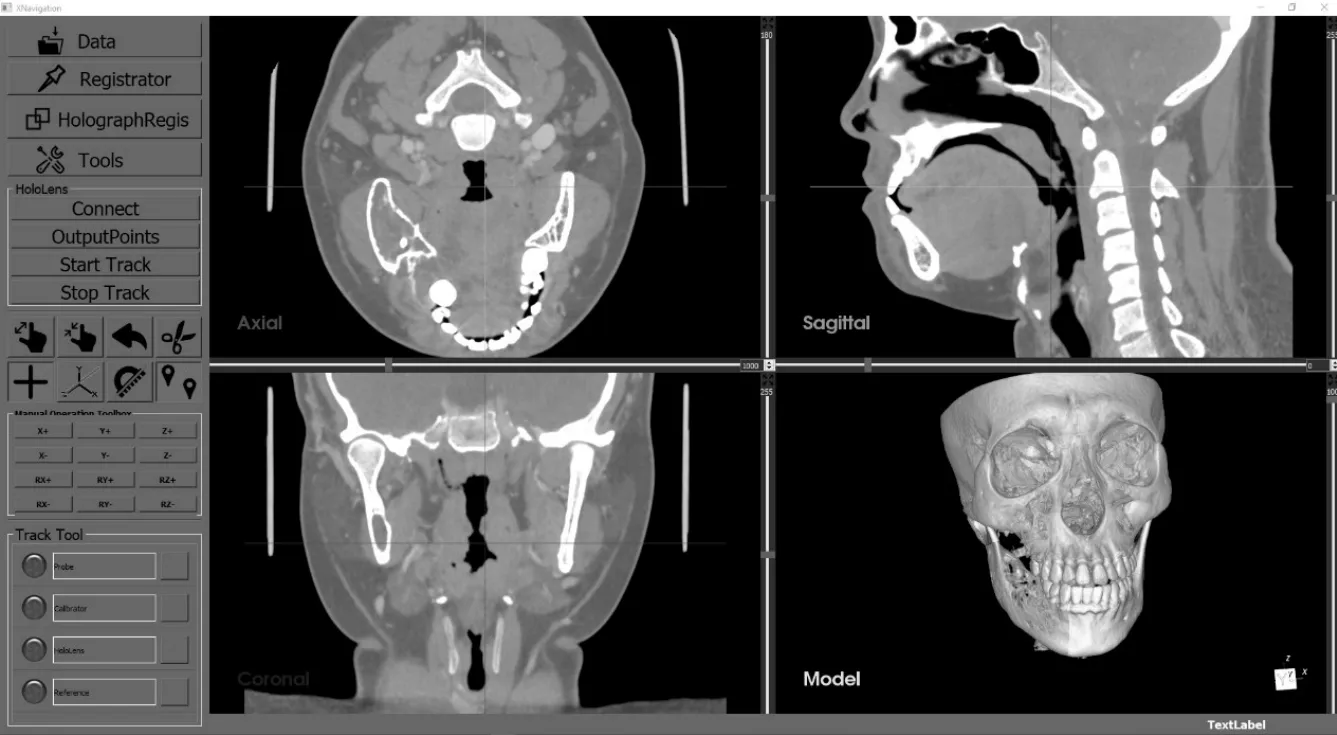
圖2 AR手術(shù)導(dǎo)航系統(tǒng)界面Fig.2 Interface of AR-based surgical navigation system
1)圖像分割和三維重建。用閾值分割法[26]和區(qū)域生長(zhǎng)算法將手術(shù)靶區(qū)從原始CT 中分割出來(lái)并進(jìn)行三維重建。重建的三維數(shù)據(jù)與原始CT圖像具有相同的坐標(biāo)系,這將簡(jiǎn)化導(dǎo)航系統(tǒng)中的變換關(guān)系。
2)術(shù)前手術(shù)規(guī)劃。在CT影像和三維重建數(shù)據(jù)的基礎(chǔ)上,利用專門(mén)設(shè)計(jì)的軟件進(jìn)行術(shù)前規(guī)劃。規(guī)劃結(jié)果將以O(shè)BJ格式導(dǎo)入到HoloLens 上運(yùn)行的Windows 通用應(yīng)用平臺(tái)(Universal Windows Platform,UWP)應(yīng)用中,并在經(jīng)過(guò)配準(zhǔn)和標(biāo)定步驟后實(shí)現(xiàn)和實(shí)際手術(shù)靶區(qū)的對(duì)齊。
3)圖像配準(zhǔn)。圖像配準(zhǔn)實(shí)現(xiàn)了手術(shù)靶區(qū)與術(shù)前CT 坐標(biāo)系的幾何對(duì)齊[27]。系統(tǒng)提供兩種可選的配準(zhǔn)方法:表面匹配和點(diǎn)配準(zhǔn)。如果手術(shù)靶區(qū)存在明顯的解剖特征或人為基準(zhǔn)點(diǎn),則選擇具有較高精度的點(diǎn)配準(zhǔn)方法;否則選擇基于迭代最近點(diǎn)方法[28]的表面配準(zhǔn)。在一次實(shí)驗(yàn)中,根據(jù)場(chǎng)景選擇一種方法用于計(jì)算CT 坐標(biāo)系到手術(shù)靶區(qū)固定的光學(xué)參考架之間的轉(zhuǎn)換矩陣
4)光學(xué)半透式顯示器的標(biāo)定。在完成圖像配準(zhǔn)后,用戶佩戴HoloLens 按照之前提到的方法,按順序?qū)⑻结樇恻c(diǎn)與每個(gè)虛擬標(biāo)記點(diǎn)對(duì)齊,由此完成OST-HMD 的標(biāo)定,之后用于標(biāo)定的四個(gè)標(biāo)記點(diǎn)將自動(dòng)隱藏。
5)實(shí)時(shí)跟蹤。標(biāo)定完成后,術(shù)前規(guī)劃的虛擬場(chǎng)景將自動(dòng)與真實(shí)的目標(biāo)區(qū)域?qū)R。當(dāng)目標(biāo)區(qū)域發(fā)生移動(dòng)時(shí),通過(guò)光學(xué)追蹤系統(tǒng)獲取目標(biāo)區(qū)域安裝的光學(xué)參考架的位姿變化,據(jù)此更新虛擬場(chǎng)景在HoloLens 中的平移和旋轉(zhuǎn),保證虛實(shí)融合的效果。
3.2 AR手術(shù)導(dǎo)航系統(tǒng)的實(shí)現(xiàn)
AR手術(shù)導(dǎo)航系統(tǒng)中的坐標(biāo)系變換如圖3所示。


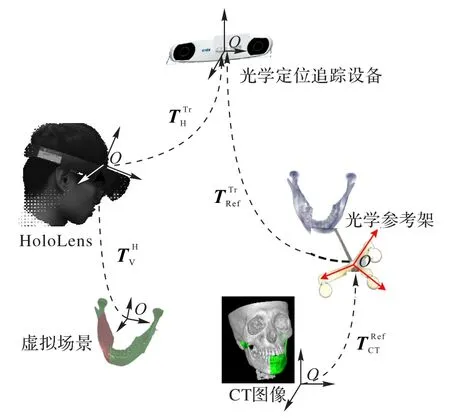
圖3 基于AR的手術(shù)導(dǎo)航系統(tǒng)的坐標(biāo)系變換Fig.3 Coordinate transformation in AR-based surgical navigation system
為了提高了術(shù)中跟蹤的實(shí)時(shí)性,所有計(jì)算過(guò)程都在PC上進(jìn)行,只將以四元數(shù)和平移向量的形式發(fā)送給HoloLens上的UWP 應(yīng)用。PC 和HoloLens 之間的雙向通信通過(guò)傳輸控制協(xié)議(Transmission Control Protocol,TCP)實(shí)現(xiàn),HoloLens 將作為客戶端與PC上導(dǎo)航系統(tǒng)內(nèi)搭建的服務(wù)端進(jìn)行連接[29],借助可識(shí)別的編碼格式實(shí)現(xiàn)實(shí)時(shí)的數(shù)據(jù)交換。
4 實(shí)驗(yàn)與結(jié)果分析
4.1 實(shí)驗(yàn)準(zhǔn)備
為了模擬手術(shù)導(dǎo)航的實(shí)際過(guò)程,本文使用帶有8 個(gè)鈦釘基準(zhǔn)點(diǎn)的3D 打印顱骨模型(如圖4 所示)。對(duì)該模型進(jìn)行掃描得到的CT 數(shù)據(jù)分辨率為512×512 像素,層厚為0.625 mm。實(shí)驗(yàn)中使用的硬件設(shè)備為L(zhǎng)enovo 筆記本電腦(Intel Core i5 CPU@2.60 GHz,8.0 GB RAM),光學(xué)定位追蹤設(shè)備Polaris Vicra(Northern Digital Inc.,Canada)和半透式頭戴顯示器Microsoft HoloLens(Microsoft Inc.,USA)。HoloLens 上運(yùn)行的UWP 應(yīng)用基于Unity 2017.4.1f1 和微軟MRTK 2017.4.0.0開(kāi)發(fā)。
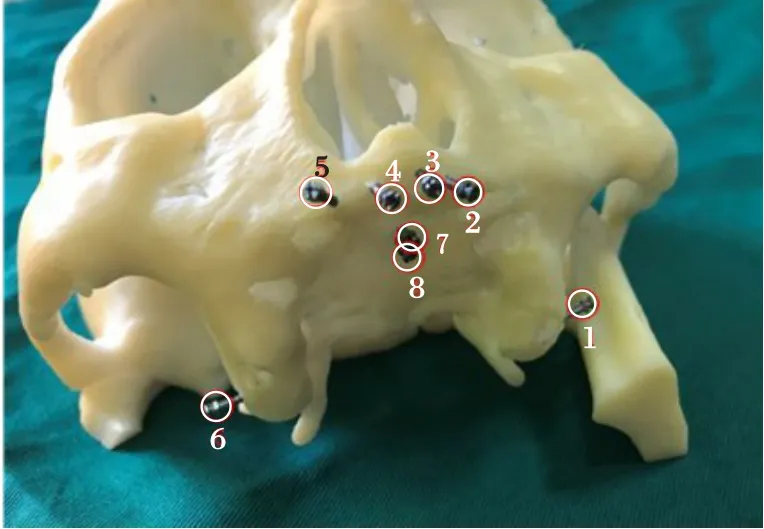
圖4 帶有鈦釘?shù)娘B骨模型Fig.4 Skull model with titanium crews
4.2 精度驗(yàn)證實(shí)驗(yàn)
為了評(píng)估AR 手術(shù)導(dǎo)航系統(tǒng)的精度,本文設(shè)計(jì)了如下的模型實(shí)驗(yàn)。首先,對(duì)掃描后的顱骨CT 圖像進(jìn)行三維重建,用自動(dòng)基準(zhǔn)點(diǎn)識(shí)別算法定位CT 圖像中鈦制基準(zhǔn)點(diǎn)的位置[23]。將光學(xué)參考架固定在頭骨模型上以便光學(xué)定位追蹤系統(tǒng)可以跟蹤顱骨模型的運(yùn)動(dòng)。在圖像配準(zhǔn)中,用戶操作探針的尖端來(lái)選擇模型上的基準(zhǔn)點(diǎn),通過(guò)3.1 節(jié)中的點(diǎn)配準(zhǔn)算法計(jì)算得到該配準(zhǔn)方法配準(zhǔn)后的TRE 通常為0.4 mm 左右。為了使虛擬場(chǎng)景和顱骨模型實(shí)現(xiàn)重合,用戶戴上HoloLens 然后依次用探針尖端與4 個(gè)三維虛擬標(biāo)記點(diǎn)重合。該步驟完成后根據(jù)式(3)和式(4)可計(jì)算得出
完成OST-HMD的標(biāo)定后,用戶用探針尖端采集顱骨模型上第i個(gè)真實(shí)的鈦制基準(zhǔn)點(diǎn)(xi,yi,zi)∈R3在光學(xué)追蹤系統(tǒng)坐標(biāo)系下的位置,向量fi=(xi,yi,zi,1)作為真實(shí)值。HoloLens坐標(biāo)系下的虛擬基準(zhǔn)點(diǎn)將被轉(zhuǎn)換至光學(xué)追蹤坐標(biāo)系下以計(jì)算整個(gè)系統(tǒng)的誤差。假設(shè)HoloLens 空間中的第i個(gè)虛擬基準(zhǔn)點(diǎn)可以表示為(xvi,yvi,zvi)∈R3,且向量fv(i)=(xvi,yvi,zvi,1),那么fv(i)可通過(guò)式(7)轉(zhuǎn)換至光學(xué)追蹤坐標(biāo)系下:

其中:fr(i)是虛擬標(biāo)記點(diǎn)在光學(xué)追蹤坐標(biāo)系下的映射。系統(tǒng)的誤差可以由式(8)表示:

本文選取8 位之前未接觸過(guò)該系統(tǒng)的志愿者參照上述步驟進(jìn)行了精度驗(yàn)證實(shí)驗(yàn),標(biāo)定過(guò)程的平均耗時(shí)約為23.8 s。實(shí)驗(yàn)結(jié)果表明8 枚鈦制基準(zhǔn)點(diǎn)的均方根誤差為1.39±0.49 mm,實(shí)驗(yàn)的原始誤差記錄如表1 所示,標(biāo)定過(guò)程的時(shí)間記錄如表2所示。圖5展示了其中一位志愿者標(biāo)定后的畫(huà)面,顏色較淺的虛擬基準(zhǔn)點(diǎn)與深色的真實(shí)鈦基準(zhǔn)點(diǎn)尖端重合,表明本文的標(biāo)定算法具有較高的精度。
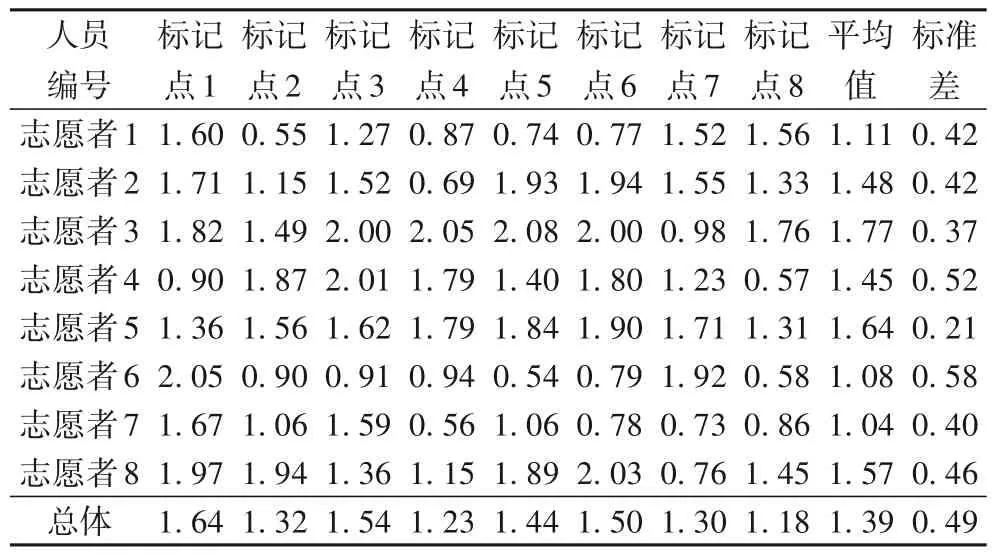
表1 精度驗(yàn)證實(shí)驗(yàn)的原始數(shù)據(jù) 單位:mmTab.1 Original data of accuracy validation experiment unit:mm
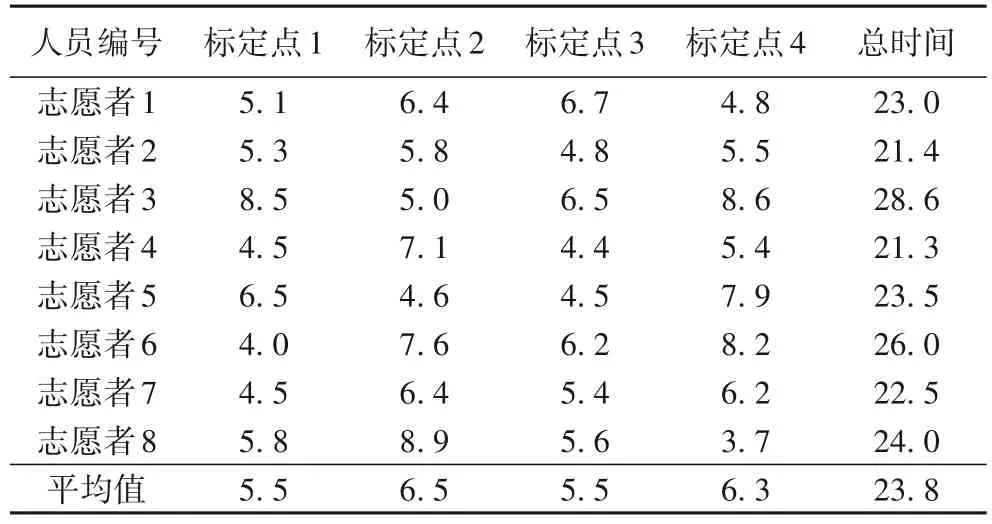
表2 標(biāo)定所用時(shí)間 單位:sTab.2 Time consumption of calibration unit:s
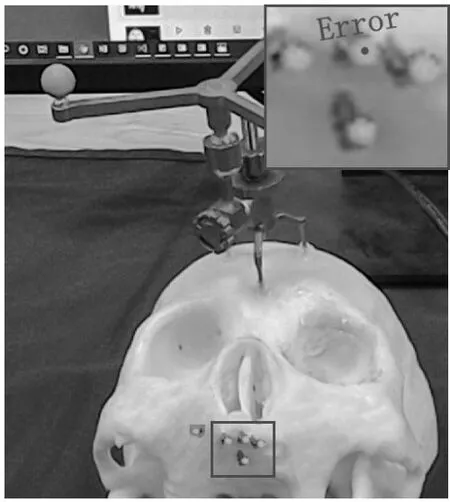
圖5 精度驗(yàn)證實(shí)驗(yàn)的結(jié)果Fig.5 Result of accuracy validation experiment
本文還以3D打印的下頜骨為對(duì)象進(jìn)行了模型實(shí)驗(yàn),實(shí)驗(yàn)按照3.1 節(jié)中的步驟進(jìn)行。標(biāo)定時(shí)的場(chǎng)景如圖6(a)所示,標(biāo)定后的結(jié)果如圖6(b)所示,紅色部分為預(yù)定進(jìn)行切除的組織,綠色部分為保留的組織。為了模擬真實(shí)的手術(shù)場(chǎng)景,該模型上并未裝有鈦基準(zhǔn)點(diǎn),由經(jīng)驗(yàn)豐富的醫(yī)生選取下頜底、下頜角、下頜切跡等下頜骨解剖學(xué)特征作為標(biāo)記點(diǎn)進(jìn)行了圖像配準(zhǔn),之后采用本文的方法完成標(biāo)定。由于無(wú)法采用鈦基準(zhǔn)點(diǎn)進(jìn)行結(jié)果評(píng)估,故本文采集了用戶視野下虛實(shí)融合的結(jié)果圖,利用圖像分割中常用的Dice 相似系數(shù)(Dice Similarity Coefficient,DSC)進(jìn)行誤差評(píng)估。
Dice 相似系數(shù)通常用來(lái)計(jì)算集合的相似度,這里本文用它來(lái)表示虛擬模型和真實(shí)物體在用戶視野中的重合度。若將真實(shí)物體在圖6(b)中所占的像素記為集合T,虛擬模型在圖6(b)中所占的像素記為集合V,則Dice相似系數(shù)可以表示為:

由式(9)可知,當(dāng)虛擬模型和真實(shí)物體完全重合時(shí),集合T和集合V中的像素完全相同,此時(shí)對(duì)應(yīng)的Dice 系數(shù)為1,故Dice 系數(shù)越接近1 表示虛實(shí)融合的效果越好。本文由一位具有豐富圖像數(shù)據(jù)集標(biāo)注經(jīng)驗(yàn)的志愿者對(duì)圖6(b)中的真實(shí)物體和虛擬模型進(jìn)行了手動(dòng)分割,并據(jù)此計(jì)算得出Dice 相似系數(shù)為0.913 7,表明虛擬規(guī)劃模型和下頜骨實(shí)物之間具有很高的重合度,證明本文設(shè)計(jì)的基于增強(qiáng)現(xiàn)實(shí)的手術(shù)導(dǎo)航系統(tǒng)具有較高的精度。
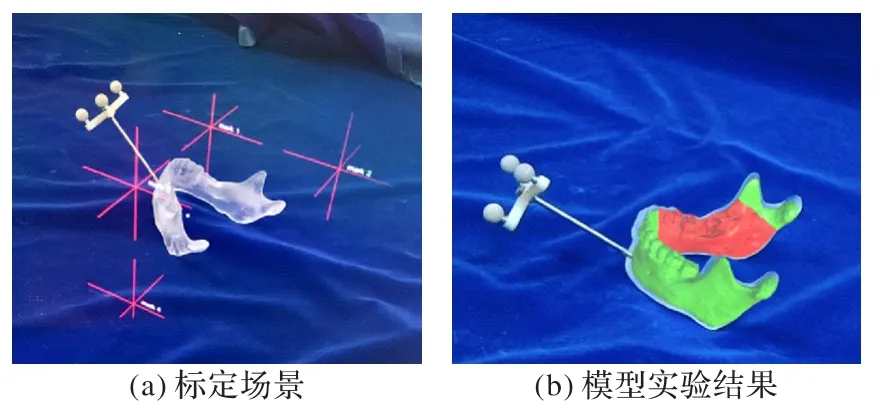
圖6 標(biāo)定場(chǎng)景和模型實(shí)驗(yàn)結(jié)果Fig.6 Calibration scene and result of model experiment
4.3 結(jié)果分析與討論
基于增強(qiáng)現(xiàn)實(shí)的手術(shù)導(dǎo)航系統(tǒng)的誤差主要來(lái)源于光學(xué)追蹤系統(tǒng)的定位偏差、圖像配準(zhǔn)的誤差和OST-HMD 的標(biāo)定誤差。光學(xué)追蹤設(shè)備在工作空間的誤差小于0.2 mm[30],點(diǎn)配準(zhǔn)算法的誤差一般小于0.5 mm,而基于迭代最近點(diǎn)(ICP)算法的面配準(zhǔn)誤差約為1 mm。同時(shí),由于OST-HMD 與光學(xué)追蹤系統(tǒng)之間的映射可能不是完全的等距變換,因此本文的求解策略也可能產(chǎn)生誤差。在采用點(diǎn)配準(zhǔn)方法的精度驗(yàn)證實(shí)驗(yàn)中,整個(gè)系統(tǒng)的平均誤差小于2 mm,證明該方法有臨床應(yīng)用的可行性。
表3 列出了不同方法的精度對(duì)比,可以看出本文方法具有較為明顯的優(yōu)勢(shì)。同文獻(xiàn)[18]的標(biāo)定方法相比,其采用正方體的標(biāo)定方法由于實(shí)物的體積原因容易造成遮擋,因此在深度感知上表現(xiàn)較差,導(dǎo)致z方向標(biāo)定誤差較大。文獻(xiàn)[11]方法用HoloLens的虛擬光標(biāo)與空間標(biāo)識(shí)圖的多個(gè)頂點(diǎn)對(duì)齊完成注冊(cè),注冊(cè)過(guò)程需要移動(dòng)和旋轉(zhuǎn)頭部進(jìn)行,容易造成HoloLens重新定位出現(xiàn)偏差。本文的標(biāo)定方法采用三維虛擬點(diǎn)配準(zhǔn),因此遮擋狀況不明顯,誤差在三個(gè)方向的分布較為均勻。此外,由于標(biāo)定時(shí)用探針的移動(dòng)代替了頭部的移動(dòng)和旋轉(zhuǎn),在標(biāo)定過(guò)程中頭戴設(shè)備不會(huì)發(fā)生大幅度運(yùn)動(dòng),保證了HoloLens自身定位的準(zhǔn)確性,也改善用戶的使用體驗(yàn)。
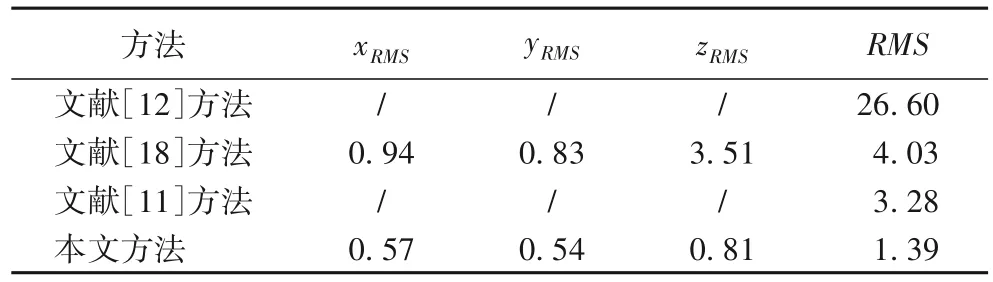
表3 不同方法的精度對(duì)比 單位:mmTab.3 Accuracy comparison of different methods unit:mm
5 結(jié)語(yǔ)
本文提出了一種快速、準(zhǔn)確的光學(xué)半透式頭戴顯示器的標(biāo)定方法,用HoloLens 進(jìn)行了多次實(shí)驗(yàn)并在此基礎(chǔ)上開(kāi)發(fā)了基于增強(qiáng)現(xiàn)實(shí)的手術(shù)導(dǎo)航系統(tǒng)。標(biāo)定過(guò)程收集了OST-HMD的虛擬空間和光學(xué)追蹤空間的三維點(diǎn)集,對(duì)3D-3D 映射直接進(jìn)行估計(jì),建立了虛擬空間到真實(shí)空間的轉(zhuǎn)換矩陣。由于本文的標(biāo)定方法采用的是虛擬空間中的3D標(biāo)記點(diǎn),因此該方法對(duì)于一些制造商只允許對(duì)最終的3D 可視化內(nèi)容進(jìn)行操作而不開(kāi)放內(nèi)部投影矩陣的商業(yè)半透式頭盔是可行的,解決了經(jīng)典的SPAAM方法在此情況下不適用的問(wèn)題。8組精度驗(yàn)證實(shí)驗(yàn)表明,基準(zhǔn)點(diǎn)的均方根誤差為1.39 ± 0.49 mm,用戶進(jìn)行標(biāo)定的平均耗時(shí)為23.8 s,表明該方法精度較高且操作簡(jiǎn)單。
增強(qiáng)現(xiàn)實(shí)中常見(jiàn)的延遲現(xiàn)象在該實(shí)驗(yàn)中影響較小。一方面因?yàn)槭中g(shù)靶區(qū)不會(huì)頻繁地快速移動(dòng);另一方面計(jì)算過(guò)程全部在PC 上實(shí)現(xiàn)有利于提高HoloLens 中虛擬場(chǎng)景刷新的幀速率。另外,一旦標(biāo)定完成后用戶和半透式頭盔之間不能有相對(duì)運(yùn)動(dòng),否則必須再次進(jìn)行標(biāo)定。近年來(lái)眼球捕捉技術(shù)發(fā)展迅速,最新發(fā)布的第二代HoloLens 提高了硬件性能并提供了眼球捕捉功能,這將有利于促進(jìn)本文的導(dǎo)航系統(tǒng)在臨床上的應(yīng)用。目前本文的導(dǎo)航系統(tǒng)無(wú)法應(yīng)用于形變的組織和器官,未來(lái)將對(duì)三維網(wǎng)格模型進(jìn)行動(dòng)力學(xué)建模,并利用計(jì)算機(jī)視覺(jué)跟蹤實(shí)際組織的形變將其反饋到增強(qiáng)顯示的三維術(shù)前規(guī)劃中,提高該系統(tǒng)的魯棒性,擴(kuò)大其臨床適用范圍。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
河北畫(huà)報(bào)(2020年10期)2020-11-26 07:20:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
中國(guó)衛(wèi)生標(biāo)準(zhǔn)管理(2015年3期)2016-01-14 03:41:47
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年13期)2014-03-01 04:26:36