基于故障觀測器的多無人機姿態一致性控制
2021-03-18 08:04:18薛智爽劉小芳劉永春
計算機工程 2021年3期
唐 余,薛智爽,劉小芳,劉永春,張 果,余 亮
(1.四川輕化工大學人工智能四川省重點實驗室,四川自貢 643000;2.四川輕化工大學自動化與信息工程學院,四川自貢 643000;3.四川輕化工大學計算機科學與工程學院,四川自貢 643000;4.四川輕化工大學物理與電子信息工程學院,四川自貢 643000)
0 概述
多無人機協同控制技術是利用多架無人機通過任務分配及調度的方式完成指定任務,近年來在軍事、民用等領域具有廣泛的應用。在多數情況下,使用多個無人機協同工作比使用單個無人機更為有效,比如在大范圍內搜索目標以及繪制地圖時,可通過無人機團隊合作實現空中加油的任務[1-3]。多無人機協同控制中最基本的問題是一致性問題,是指在一個集群中的無人機基于相鄰無人機信息以及一致性控制協議同步到一個公共狀態中[4-5],這種一致性控制協議可分為非主從式控制協議和主從式控制協議[6-7]兩類。主從式一致性控制是所有無人機都相對領導者或參考信號進行同步。由于無人機進行長時高空作業時,不僅需要應對來自外部的干擾,還需要解決由于機體內部的零件磨損和退化引起的模型或參數不確定、測量存在誤差以及控制器微小故障等問題。在實際應用過程中,無人機真實模型的獲取較為困難,而僅基于無人機名義模型設計的一致性控制器不能使得無人機按照期望的姿態飛行。
文獻[8]針對四旋翼無人機姿態控制問題,提出一種基于干擾觀測器的軌跡跟蹤魯棒控制算法。通過對未知氣動干擾力矩進行觀測,并在控制輸入中加入干擾力矩的觀測值,確保姿態子系統能夠以指數收斂速率跟蹤中間指令信號。文獻[9]提出一種基于多輸入多輸出擴展狀態觀測器的新型水下機器人積分滑模控制器,并利用自適應增益更新算法估計不確定性的上界,實現水下機器人對期望姿態的漸近跟蹤。文獻[10]針對具有未知擾動的非線性多智能體系統的事件觸發跟蹤控制問題,通過設計擾動觀測器來估計未知的外部擾動,并基于Lyapunov穩定性理論和Backstepping 方法,證明一致性跟蹤誤差位于原點的一個小鄰域內。文獻[11]在模型或參數不確定、未知海洋擾動和伴隨測量誤差的情況下,關于有向網絡上由多個動態領導者引導的網絡化自主水下機器人的圍堵控制問題,提出一種新的基于預測器的神經動態曲面控制設計方法。該方法可用于開發自適應包容控制器,使機器人的運動軌跡收斂于領導者附近。文獻[12]在設計的控制器中直接構造神經網絡,以解決干擾及模型不確定等問題造成的不利影響,并實現多無人機姿態的一致性控制。然而,上述姿態控制方法僅考慮了姿態跟蹤中的單個干擾問題,并未綜合考慮姿態跟蹤中出現的復合干擾問題,因此姿態的同步性能還有待提高。
本文基于觀測器理論[13-14]提出一種故障檢測方法,對外部干擾、模型不確定、測量誤差以及控制器微小故障等問題進行實時估計,并結合無人機名義模型設計一致性控制器,解決由于上述故障與干擾引起的飛行姿態不理想問題,通過與文獻[12]所提控制器進行對比,以驗證該控制器的有效性。
1 無人機姿態系統的數學模型
為了方便起見,本文使用的符號表示如下含義:
1)? 表示常數空間,?n表示n維向量空間,?n×m表示n×m維的矩陣空間,In表示n×n維的單位矩陣。
2)tr(·)表示求解矩陣的跡,·T表示矩陣轉置,·+表示求解矩陣的Moore-Penrose 廣義逆,diag(·) 表示構造對角矩陣,λmin(·)和λmax(·)分別為矩陣的最小和最大特征值。
3)?表示求解克羅內克積。
固定翼無人機姿態在空間中的運動具有3 個繞質心旋轉的自由度,分別為滾轉、俯仰和偏航運動。無人機的副翼和升降翼相互作用產生滾轉力矩和俯仰力矩,而方向翼產生偏航力矩。如圖1 所示,無人機的運動涉及慣性坐標系、機體坐標系和氣流坐標系,并分別用字母n、b和w表示。
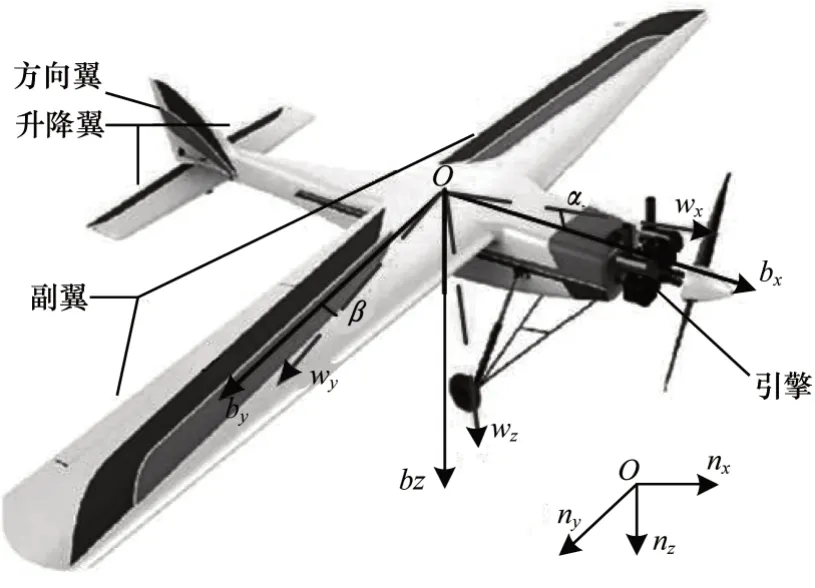
圖1 固定翼無人機模型及其慣性坐標系Fig.1 Fixed wing UAV model and its inertial coordinate system
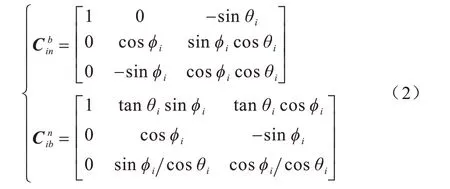
以無人機i為例,其相對于慣性坐標系的滾轉、俯仰和偏航姿態角分別用歐拉角φi、θi和ψi表示,相對于機體坐標系的姿態角速度分別用pi、qi和ri表示。其中,i∈[1,2,…,N],N為實現姿態同步的無人機數量。令,則兩者之間具有如下轉換關系:

根據牛頓力學[15]可推導出無人機i姿態系統的動力學方程為:

其中,Ib是通用無人機轉動慣量矩陣,其完整形式如式(4)所示。

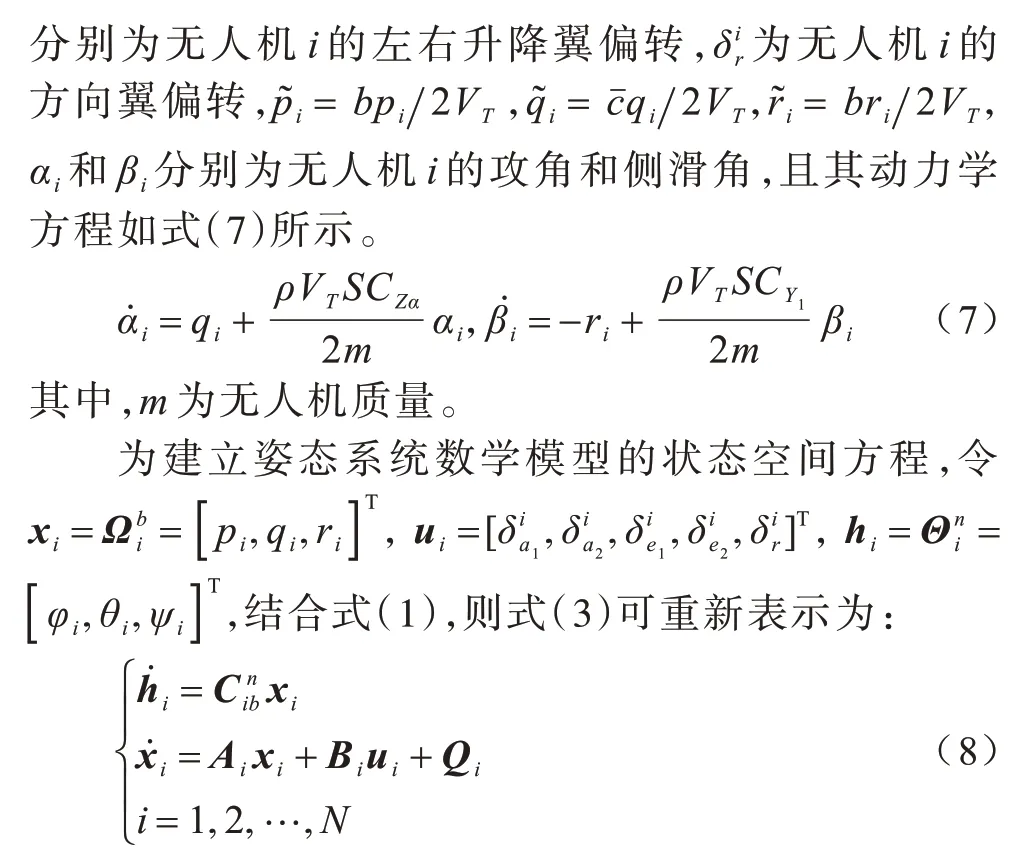
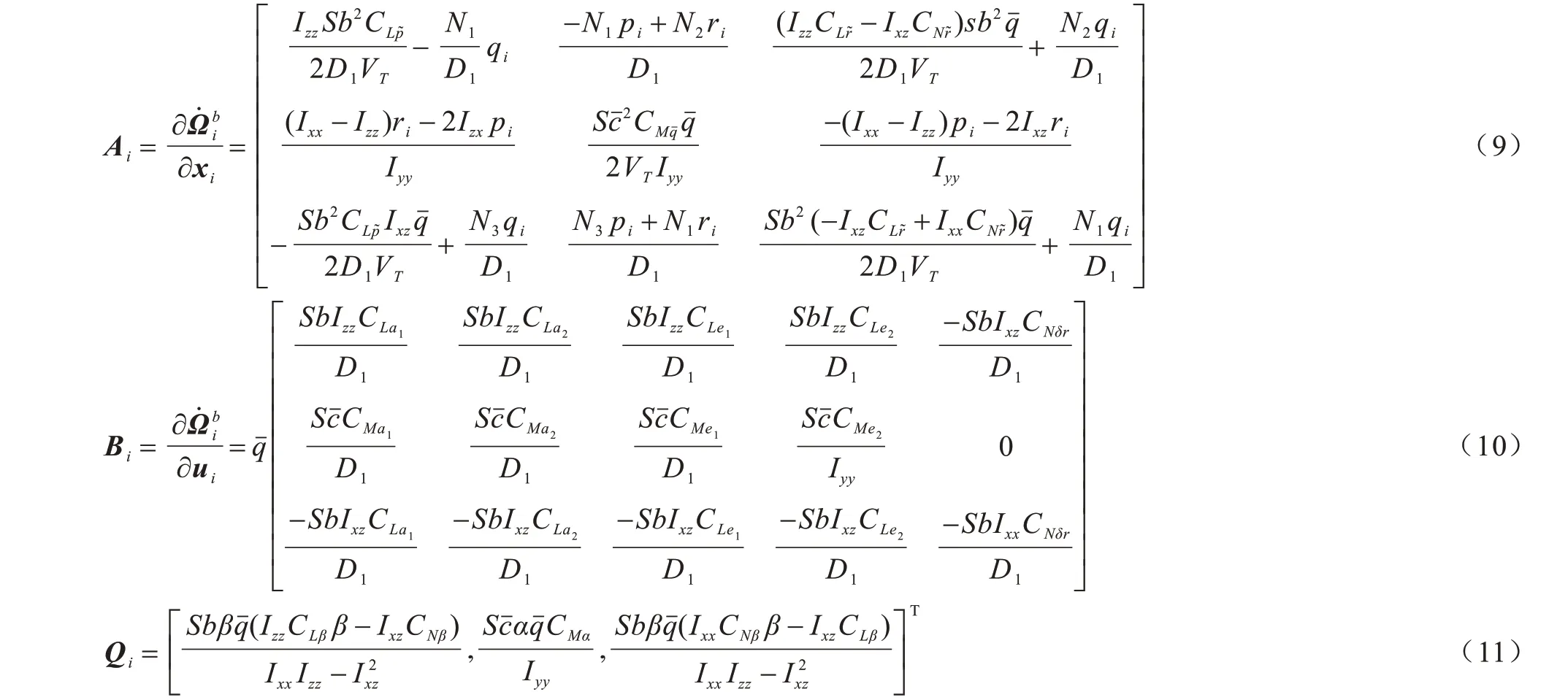
式(8)為無人機姿態系統名義模型(無模型不確定及外部干擾下無人機姿態系統的數學模型)的狀態空間方程。Ai∈?3×3、Bi∈?3×5和Qi∈?3為名義模型,它們的完整形式如下所示:

2 基于觀測器的故障檢測方法
結合式(8),在干擾、模型不確定、狀態測量誤差以及控制器微小故障下,一類非線性多無人機姿態運動數學模型可以建模為以下微分方程:
理論上式(12)可以等價為:
其中,Fi(t)為包含干擾、模型不確定、狀態測量誤差以及控制器微小故障的集成不確定項,其具體形式為:
為方便使用觀測器觀測集成不確定項,可截取式(13)中包含集成不確定項的部分,并在此基礎上設計如下包含輸出方程的多無人機姿態運動方程:
其中,yi(t)為輸出向量,Ci=Im為輸出矩陣,Im為維數為m的單位矩陣,m為狀態向量的維數。
式(15)對應的模型不確定及干擾觀測器可被定義為:

因此,可得出以下結論:Lyapunov 函數Vi將收斂到半徑附近,κi=2λmax(Pi)/λmin(Qi),其中σi為足夠小的正常數,κi的值可以通過調整參數Pi和Qi而設計到足夠小,理論上構造函數Vi的觀測誤差和神經網絡權值估計誤差將收斂到足夠小。
3 主從式多無人機姿態一致性控制
因為式(13)與式(15)等價,所以適用于式(15)的控制器同樣適用于式(13),本文將在式(15)的基礎上設計出多無人機姿態一致性控制器,且在設計主從式多無人機姿態一致性控制器過程中,須給出參考信號或領導者狀態方程:
其中,hl(t),xl∈?3為領導者狀態,fl(t)∈?3為有界光滑向量函數且‖fl(t) ‖<ε。本文控制任務是在模型不確定、外部干擾以及智能體與領導者之間通信受限(只有部分無人機能與領導者通信)下,設計一致性控制方案,使得每個無人機xi都能精確跟蹤領導者狀態hl(t)和xl,即limt→∞(‖xi(t)-xl(t) ‖+‖hi(t)-hl(t)‖)=0。
為實現無人機姿態的一致性,本文引用了圖論[17-18],一個無向圖可定義為:

其中,v=[v1,v2,…,vN]為圖節點集,ε?v×v為圖邊集。
根據文獻[17-18]可知,如果在2 個節點之間存在一條邊,則表示這2 個節點互為鄰接節點。如果圖Γ中任意2 個節點之間存在路徑,則稱該圖為連通圖。結合式(33),將N個需實現姿態同步的無人機視作v中的節點,則該無人機之間的關系可以用圖Γ表示。圖Γ的鄰接權重矩陣可以表示為:

其中,aii=0 且aik=aki,如果無人機i和無人機k之間存在通信,則aik>0,且矩陣A的Laplace 矩陣L為:

其中,D=diag(d1,d2,…,dN)∈?N×N,
結合式(12)和式(32),則無人機i和領導者之間的跟蹤誤差可定義為:
根據文獻[19]可知,無人機i的主從式一致性誤差可定義為:

式(39)為無人機與領導者之間的通信權重矩陣,當且僅當bi>0 時,無人機i和領導者之間存在信息交換。結合式(36),則式(38)可重新表示為:
對于Laplace 矩陣L而言,其特征值為非負,因此矩陣=L+B特征值也為非負。因此,定義一個Lyapunov 正定函數為:

其中,正定矩陣?I3∈?3N×3N可以被分解為如式(44)所示。

其中,M∈?3N×3N和Λ∈?3N×3N分別為?I3的特征向量矩陣和特征值矩陣,且MT=M-1。
結合式(44),Lyapunov 函數V(t)可被重寫為:

結合式(16)~式(31)中基于觀測器與神經網絡設計的集成不確定項估計器(xi),伴隨集成不確定項時的多無人機姿態一致性同步控制器可設計為:

式(56)表明,包含集成不確定項估計誤差的參數ρˉ能夠收斂到足夠小,且通過選擇合適的參數,Lyapunov 函數V(t)也能收斂到足夠小,進而確保一致性誤差收斂到足夠小。
4 仿真與結果分析
為了驗證本文提出的針對無人機模型不確定及外部干擾下的主從式多無人機姿態一致性控制方案的有效性,實驗運用MATLAB R2016b 環境進行仿真與分析。實驗選擇6 架飛機進行模型不確定及外部干擾下的姿態一致性仿真,構建無人機模型所需參數見表1。
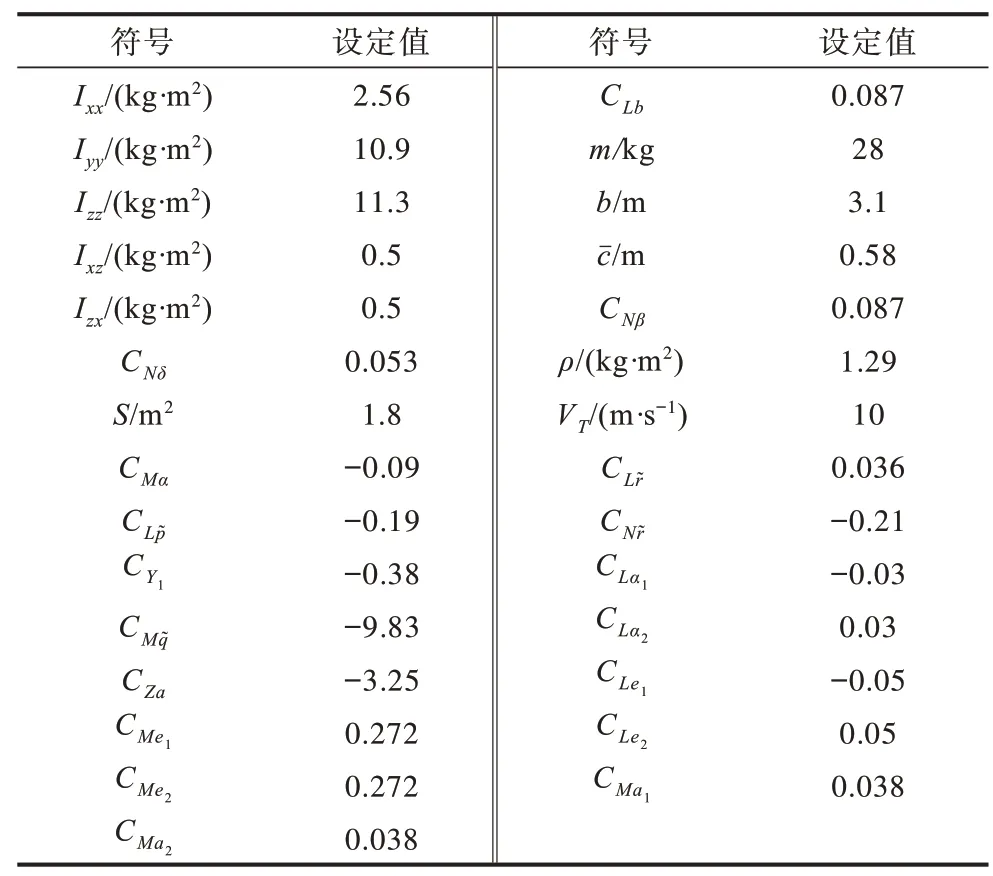
表1 無人機姿態運動模型的相關參數設置Table 1 Parameter setting of UAV attitude motion model
本文給出:

式(57)為領導者與無人機之間的通信權重矩陣,表明只有無人機1 和無人機5 與領導者之間存在信息交換,且無人機之間的鄰接權重矩陣為:
式(58)表明無人機之間存在通信。
給出慣性坐標系下的領導者姿態為:
由式(59)可得出在機體坐標系下的領導者姿態角速度函數為:

各無人機的初始姿態取值為弧度-1 到1 之間的隨機數。各無人機所受外部干擾、模型不確定項、狀態測量誤差及控制器微小故障為:
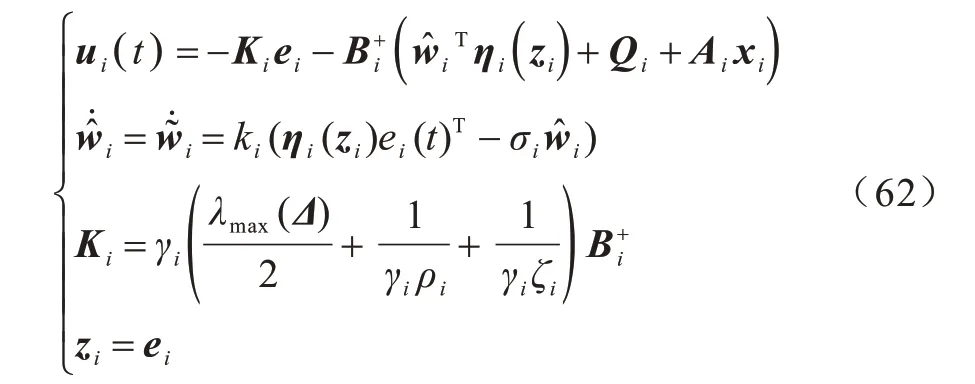
此外,為了對比驗證本文提出的故障檢測方案的性能,根據文獻[12]設置區別式(50)的控制器(基于神經網絡的直接自適應控制器)為:
本文提出方法以及對比方法的控制參數相同,具體如表2 所示。
表2 各無人機所需控制參數Table 2 Control parameters of each UAV
本文提出的基于觀測器的間接自適應一致性方法的仿真結果如圖2 和圖3 所示。圖2 給出了無人機1 在慣性坐標系下相對于領導者姿態跟蹤的效果,圖3 給出了無人機1 主從式一致性誤差隨時間的變化情況。
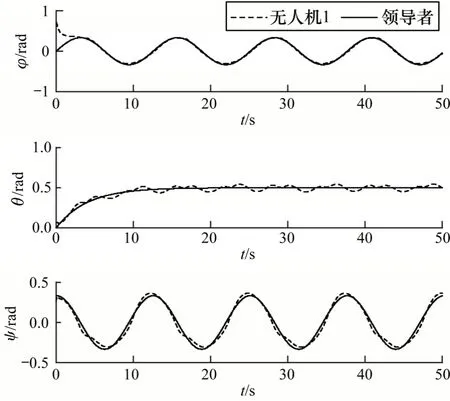
圖2 式(50)控制下無人機相對于領導者的姿態同步效果Fig.2 Attitude synchronization effect of UAV relative to leader under the control of Eq.(50)
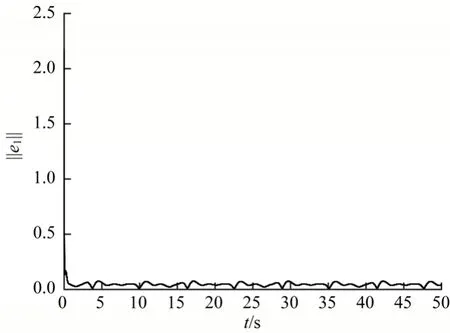
圖3 式(50)控制下無人機主從式一致性誤差Fig.3 Leader-follower consistency error of UAV under the control of Eq.(50)
無人機1 和無人機2 的集成不確定項及估計值隨時間的變化情況如圖4 所示。從中可以看出曲線的擬合度較好,這說明本文設計的控制器能夠補償不確定項給無人機同步帶來的干擾。圖5給出了無人機不確定項估計誤差隨時間的變化情況。基于文獻[12]提出的神經網絡直接自適應一致性方法的仿真結果如圖6~圖9 所示。圖6 給出了無人機1 在慣性坐標系下相對于領導者姿態跟蹤的效果,圖7 給出了無人機1 主從式一致性誤差隨時間的變化情況,圖8 給出了無人機不確定項估計誤差隨時間的變化情況,圖9 給出了無人機1 和無人機2 的集成不確定項及估計值隨時間的變化情況。從圖2、圖3 與圖6、圖7 的姿態一致性跟蹤效果可以看出,基于神經網絡的直接姿態一致性控制方法的控制效果明顯較差,相比基于觀測器的間接姿態一致性控制方法,姿態在同步過程中有明顯波動且無人機的主從式一致性誤差也較大。通過對比圖4、圖5 與圖8、圖9 可知,基于觀測器的間接不確定項估計方法對初期無人機不確定項的估計過程雖然有一定的抖動,但是相比基于神經網絡設計的直接不確定項估計方法,最終穩定的不確定項估計誤差波動范圍較小,對不確定項的估計更為精確且快速。

圖4 式(50)中無人機1 和無人機2 的故障估計效果Fig.4 Fault estimation result of UAV1 and UAV2 in Eq.(50)
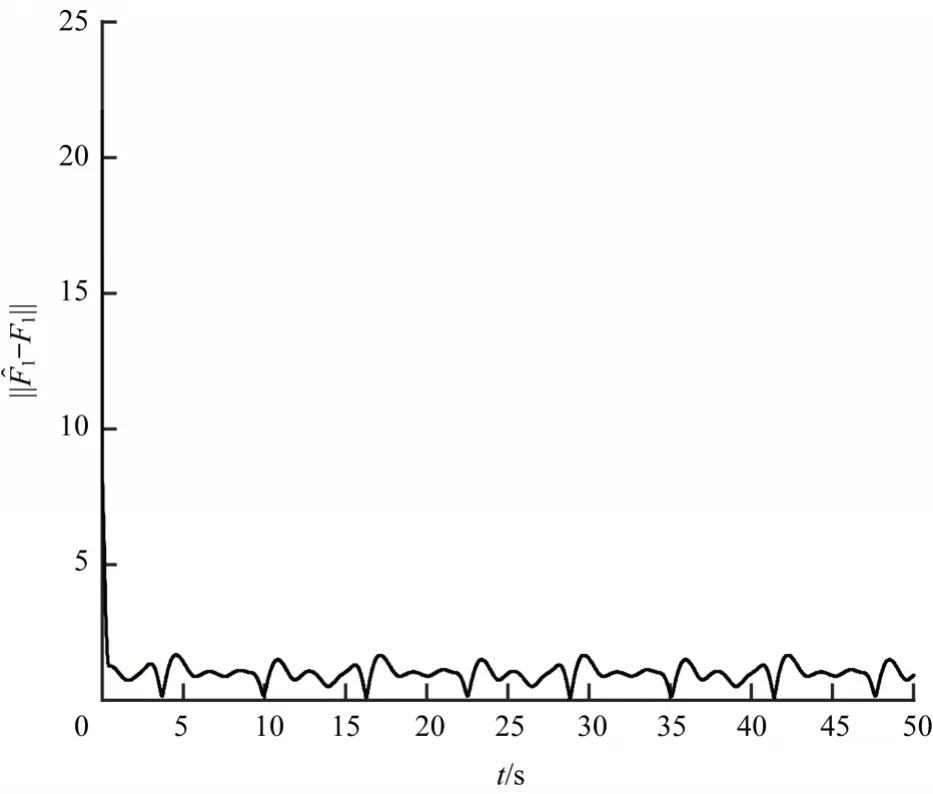
圖5 式(50)中無人機故障估計誤差Fig.5 Fault estimation error of UAV in Eq.(50)
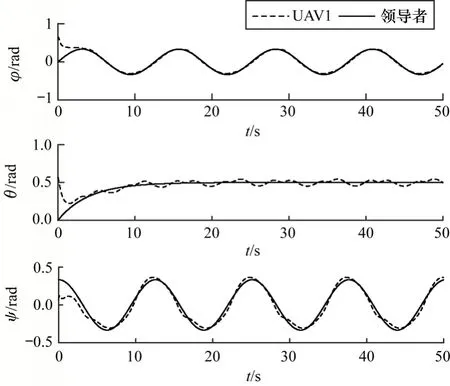
圖6 式(62)控制下無人機1 相對領導者的姿態同步效果Fig.6 Attitude synchronization effect of UAV1 relative to leader under the control of Eq.(62)
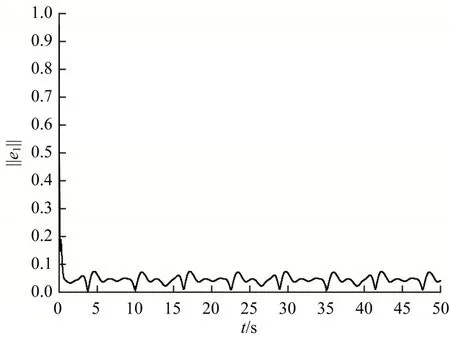
圖7 式(62)控制下無人機主從式一致性誤差Fig.7 Leader-follower consistency error of UAV under the control of Eq.(62)
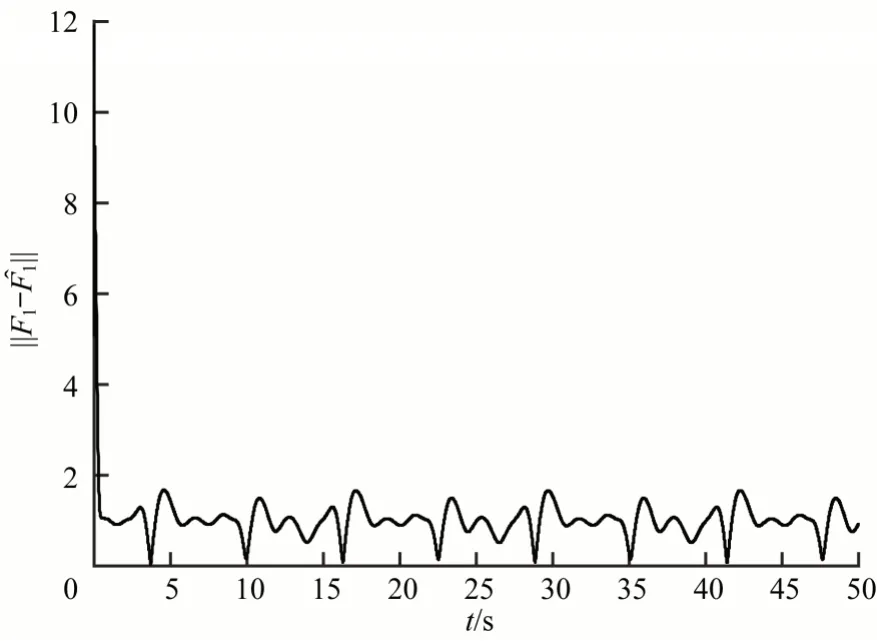
圖8 式(62)中無人機故障估計誤差Fig.8 Fault estimation error of UAV in Eq.(62)
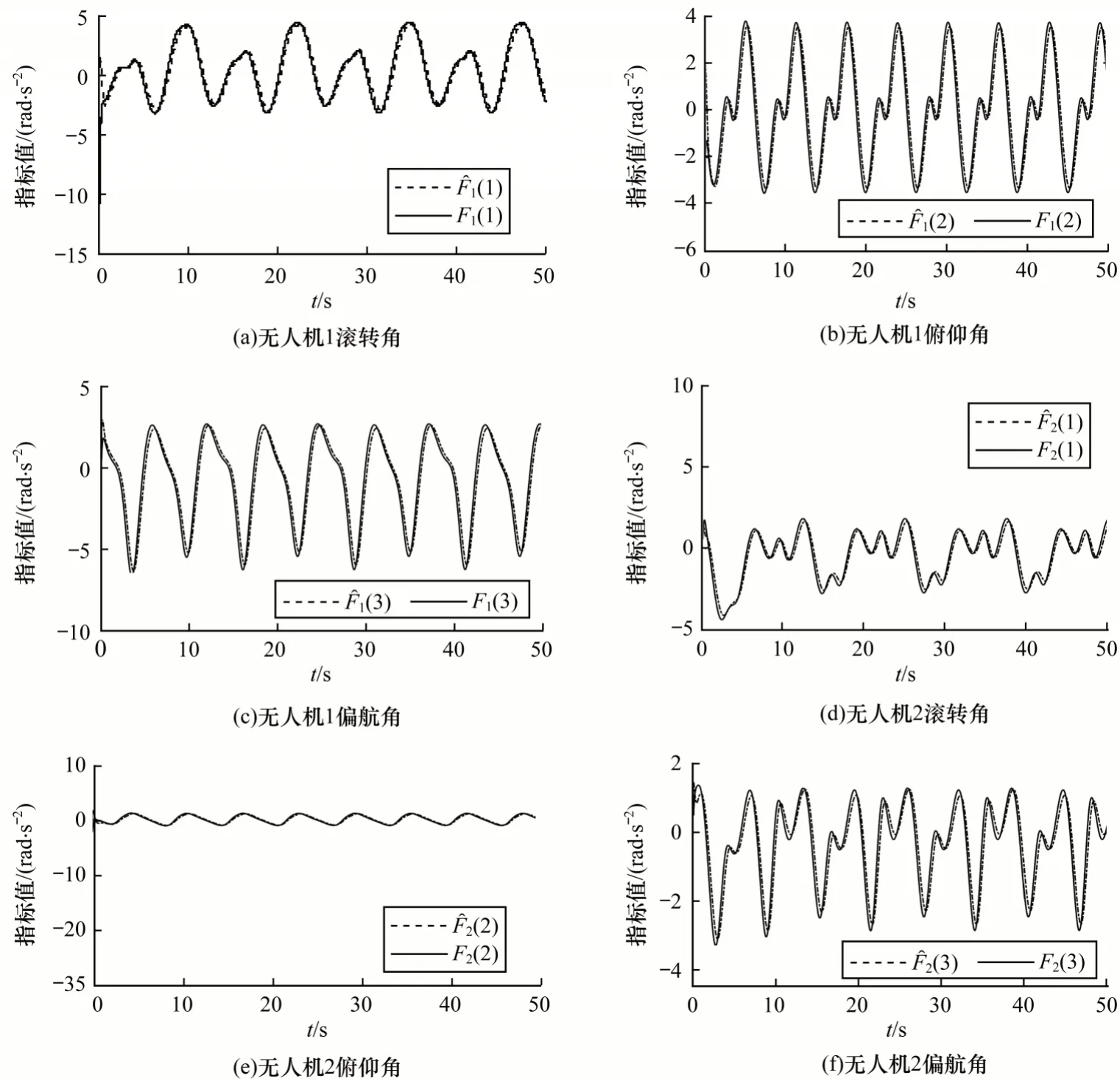
圖9 式(62)中無人機1 和無人機2 的故障估計效果Fig.9 Fault estimation effect of UAV1 and UAV2 in Eq.(62)
5 結束語
本文提出一種基于觀測器和神經網絡的故障檢測方法。該方法通過對無人機中干擾、模型不確定、狀態測量誤差以及控制器微小故障等集成不確定項進行快速精確估計,并在無需構造無人機實際模型的情況下,結合無人機名義模型設計一致性控制器,實現多無人機姿態對領導者的準確跟蹤。下一步將在基于故障觀測器的控制中引入智能控制算法,以完成無人機跟蹤任務以及路徑的尋優規劃,滿足多場景任務需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
燕山大學學報(2015年4期)2015-12-25 02:19:49
