電子凸輪曲線生成及使用方法研究*
2021-03-19 03:36:50黃云鷹王宇翔
制造技術與機床 2021年3期
關鍵詞:系統
黃 迪 黃云鷹 王宇翔
(①沈機(上海)智能系統研發設計有限公司,上海 200041;②沈陽機床(集團)有限公司上海研究院,上海200441)
電子凸輪技術利用伺服電機系統的受控運行來實現機械凸輪機構的運動規律。就現有的工程手段而言,電子凸輪系統大多使用電子凸輪表[1],通過規定主/從軸相對位移的關鍵位置控制點來描述預期的機械運動規律。該方法對于各個控制點之間的系統運動規律不做描述,工程實踐上大多由各種伺服設備基于各自的性能自由運行實現,另外該方法無法在設計階段確認執行系統一定能夠無震蕩連續運行,很多時候存在需要反復在線調試的麻煩。
使用電子凸輪曲線則相較于傳統的電子凸輪表可以更容易地設計出運行平滑無沖擊的系統,此外電子凸輪曲線能夠實現一定程度的運行軌跡控制,能夠完成許多傳統凸輪機構無法實現的復雜動作。電子凸輪曲線技術的運用依賴于對運行曲線的進行簡便且良好的描述,機器人運動控制學當中使用高次多項式曲線連接相鄰的路徑點[2],最終形成軌跡曲線的方法對這一類運行軌跡的描述和解算提供了非常好的示范。本文研究了基于多項式連接位置控制點構成的實際電子凸輪曲線的算法,對系統運行需要的實際控制對象給出了數學解算,考慮了實際運行系統當中從軸平滑耦合到凸輪曲線的問題并給出了解決方案。文章后半部分介紹了基于相關研究內容快速構建一套多軸聯動的同步沖壓線控制系統的具體應用案例。
1 構建電子凸輪曲線
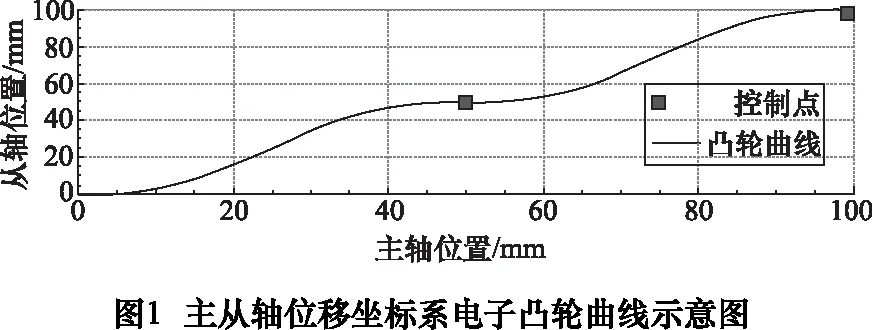
按照傳統的電子凸輪表描述主從軸相對位移的思路構建坐標系[3],以主軸位置作為坐標系的橫軸M;以從軸位置作為坐標系的縱軸S,如此則一般凸輪表中的關鍵位置控制點都可以表達為該M-S直角坐標系中的點。采用5次多項式[4]曲線逐一連接所有的位置控制點則構成了完整的凸輪曲線,如圖1所示。
1.1 求取多項式曲線:
在上述M-S坐標系內,令有兩控制點A(PMA,PSA)與B(PMB,PSB),存在5次多項式:
(1)
通過A、B兩點,其中PS為S軸變量,PM為M軸變量,a~f為未知參數,將PS對PM多次求導,可得:
(2)
(3)
考慮到凸輪系統的從軸位置一定是關聯于主軸位置的,此處可定義:
VS為M-S坐標系下從軸以主軸位移為參照系的速度;AS為M-S坐標系下從軸主軸位移為參照系的加速度;將A、B兩控制點的位置坐標值(PMA,PSA),(PMB,PSB)代入式(1);同時根據實際的需要,設定必要的A、B兩點處的VSA、ASA,VSB,ASB值,分別代入式(2)、(3),可得到6個聯立方程組:
考慮軟件實現的方便,此處利用矩陣來求得a~f的解[5],首先將方程組右側變量前的系數提取出組成矩陣M:
方程組左側的結果組成矩陣N:
矩陣M的逆矩陣與矩陣N的乘積,這里記作R,顯然:
R=M-1×N
矩陣R為1列6行矩陣,各行的值即為需要求解的式(1)中a~f值,依據上述的計算方法,即可確定M-S坐標系內任意兩個相鄰控制點之間5次曲線的描述,進而確定M-S坐標系內的任意一個電子凸輪曲線的全部描述。
1.2 實際運行系統的參照系轉換
上述M-S坐標系運算中,從軸S的速度、加速度的描述是基于主軸M為參照系計算的,實際的運行條件下需要將其轉換為的真實物理速度和加速度,具體算法如下:
實際運行系統的主軸位置PM=f(t),從軸位置PS=g(t),即主/從軸的位移是時間t的函數,顯然基于速度和加速度的物理意義,存在:
將這4個t的函數代入之前1.1中式(2)、(3)可得:
VSt=VS·VM
(4)
=[g"(t)f′(t)-g′(t)f"(t)]/f′(t)3

(5)
通過式(4)、(5),即可獲得實際運行時從軸對應于M-S坐標系內凸輪曲線的實際物理運行速度和加速度的數學解。
1.3 從軸耦合到凸輪曲線的切入方法:
實際系統的從軸和主軸有時會處于解耦狀態——比如系統開始上電運行之初,此時需要將從軸耦合到預設的凸輪曲線上,具體方法為:
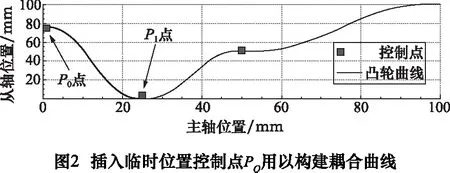
系統運行的開始時刻,讀取當前主軸與從軸的位置(PM0,PS0)作為一個臨時的關鍵位置控制點P0,并以此臨時構建出一條連接預設凸輪曲線首個位置控制點P1的5次多項式曲線。解算該曲線需要的主/從軸速度VM、VSt、加速度AM,ASt可以直接從物理驅動器讀出獲得,按照上述式(2)~(5)解算出M-S坐標系內的從軸VS、AS,即可完成耦合段多項式的解算。還是以圖1為例子,構建出的曲線如圖2所示。
2 用于拉管機同步沖壓生產線的實例
實際設備見圖3。
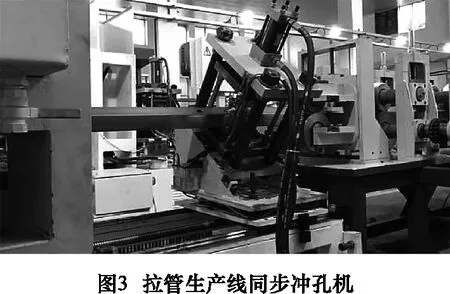
沖孔機作為下位機,不能反向控制拉管機主軸的出料時間與出料速度,僅能通過其編碼器的值讀到位置信息,因此實際執行為跟隨主軸出料長度的追沖的形式[6]。該同步沖壓生產線中包含三個運動軸:
(1)主軸:理解為拉管機的出料機構,將金屬棒料擠出,主軸為單一方向持續運行。
(2)跟隨軸:推動沖孔軸機構跟隨主軸的運行到達并保持在預設位置點的伺服軸,需要往復運行。
(3)沖孔軸:在跟隨軸到達預設的主軸跟隨位置點時執行沖孔動作的伺服軸,需要往復運行。
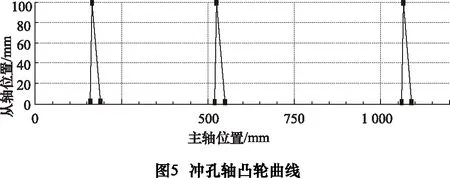
實例中主軸每出料1 200 mm完成一個加工循環,每次循環執行3個孔的沖孔動作,位置分別在主軸循環長度的150 mm、510 mm與1 050 mm處。跟隨軸與沖孔軸分別使用各自的凸輪表與主軸同步。
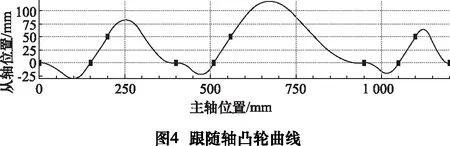
2.1 凸輪表和凸輪曲線設計實現
圖4~5為隨沖系統兩個伺服軸的電子凸輪曲線的設計實現,相應的表1~2為對應軸的凸輪關鍵位置控制點設計實現。
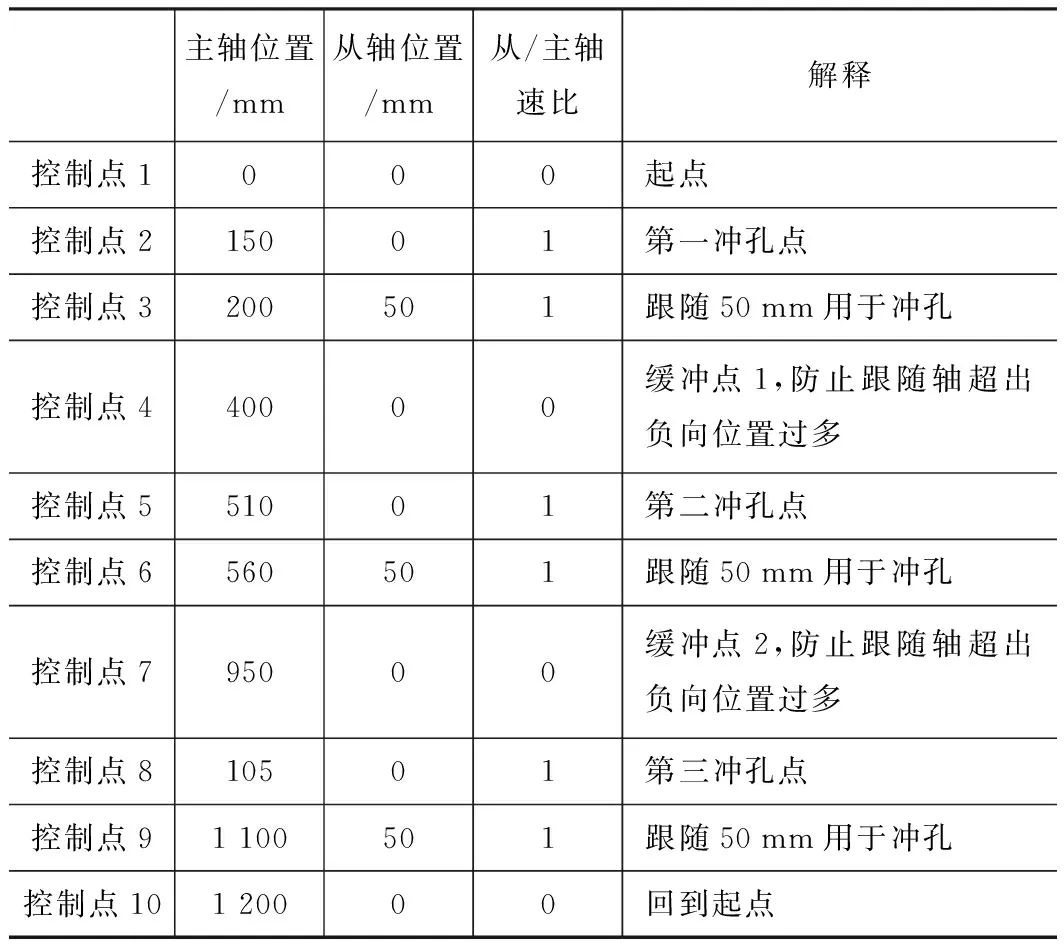
表1 跟隨軸凸輪表
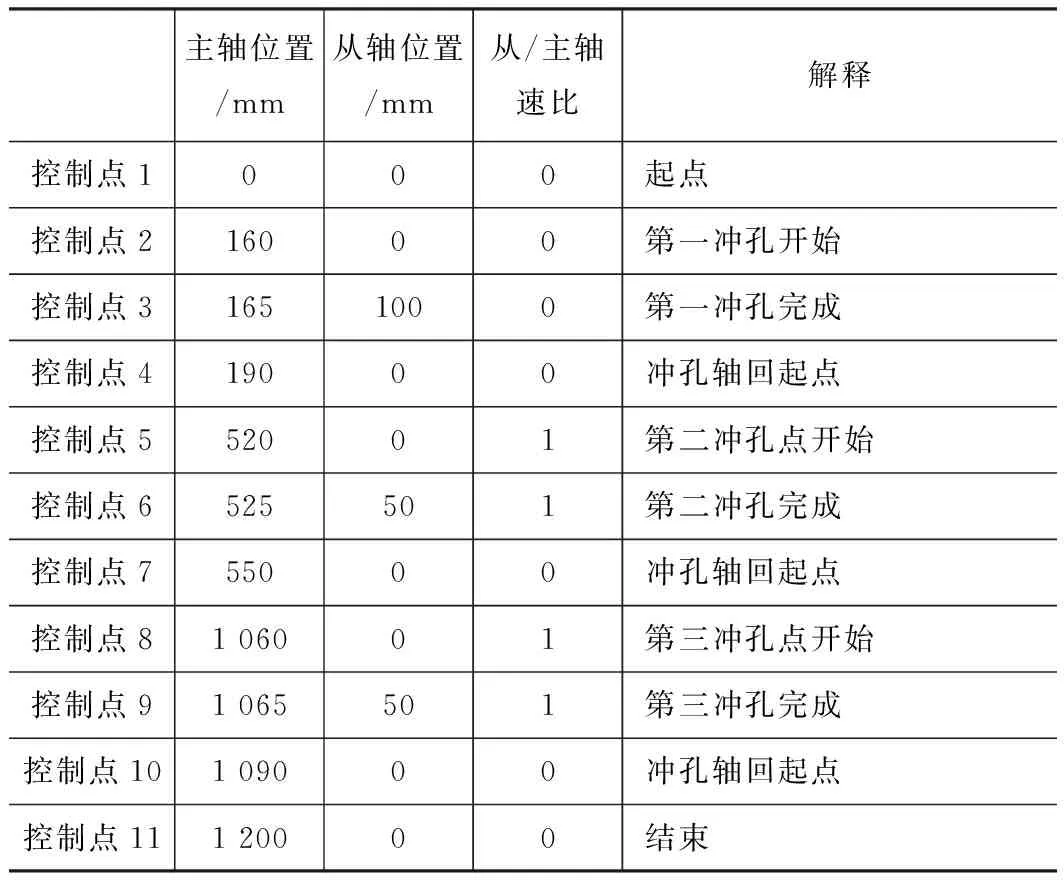
表2 沖孔軸凸輪表
3 結語
本文使用5次多項式生成的電子凸輪曲線可使得伺服電機系統在運行過程中加速度處處可導,大幅度消除了機械硬性沖擊;實現了運行過程中從動軸伺服的關鍵位置和過程運動完全可控。另外在具體的實現方法上,主從軸可動態耦合和解耦,適應更多復雜場景;可以實現多個從軸耦合于一個主軸進而執行多軸同步運動控制;如有必要還可以進一步使用虛擬主軸,完成傳統機械凸輪系統無法完成的動作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32