基于TR技術的sin-FDA-MIMO距離角度聯合估計
2021-03-21 07:18:32丁梓航謝軍偉
空軍工程大學學報 2021年6期
丁梓航, 謝軍偉, 齊 鋮
(空軍工程大學防空反導學院, 西安, 710051)
自頻控陣(frequency diverse array, FDA)這一概念被ANTONIK.P等人[1]于2006年提出,近年來許多學者對FDA雷達進行了系統的綜述并提出了其發展方向[2-4]。與相控陣不同的是,FDA雷達在每個陣元處引入一個微小的頻偏,使得其波束方向圖具有角度-距離二維相關性,但其方向圖存在角度和距離耦合。文獻[5]提出了一種采用非均勻頻偏的解耦方法,文獻[6]提出了一種采用對數頻偏的解耦方法,文獻[7]提出了一種基于子陣陣列的解耦方法,文獻[8]提出了基于遺傳算法的解耦方法。
多輸入多輸出(multiple-input multiple-output, MIMO)雷達是一種新體制雷達,文獻[9]將FDA引入MIMO雷達中,產生了FDA-MIMO雷達信號發射和接收模型;文獻[10]在FDA-MIMO中引入了一種對數的非線性頻偏,文獻[11]引入了一種正弦頻偏,兩種方法都解決了距離的周期性問題;文獻[12]提出了FDA-MIMO的波束形成算法。相比于MIMO雷達只能對角度進行估計,FDA-MIMO雷達能夠對空間中目標的角度和距離進行二維估計。如何提高FDA-MIMO雷達對目標角度和距離的估計精度也成為了研究的重點。目前大多數研究中都建立在直達波模型上的波達方向(direction of arrival,DOA)估計算法,估計的精度受信噪比影響較大。
時間反轉(time reversal, TR)技術來自于對光學相位共軛法的研究[13]。近年來很多研究人員將TR技術與雷達技術相結合[14-15],文獻[16]中提出將TR技術引入了MIMO雷達,建立了TR-MIMO模型。文獻[17-18]將該技術運用于MIMO雷達目標估計領域,提高了目標估計精度。文獻[19]將TR技術引入到FDA-MIMO中,但普通FDA-MIMO存在距離的模糊性,在對目標距離估計時易造成距離的多值性。圖1是普通FDA的波束方向圖,可以觀察到其在距離上呈現周期性,造成距離模糊。圖2是sin-FDA的波束方向圖,引入sin函數的非線性頻偏,消除了波束圖在距離上的模糊,實現了距離的單值性。
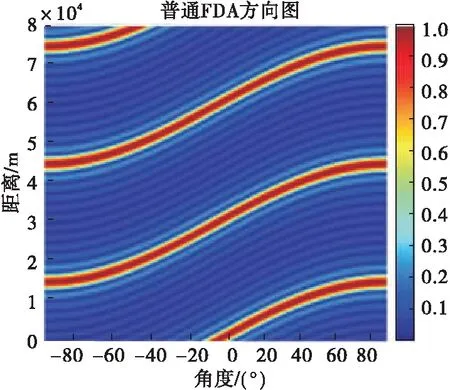
圖1 普通FDA波束圖
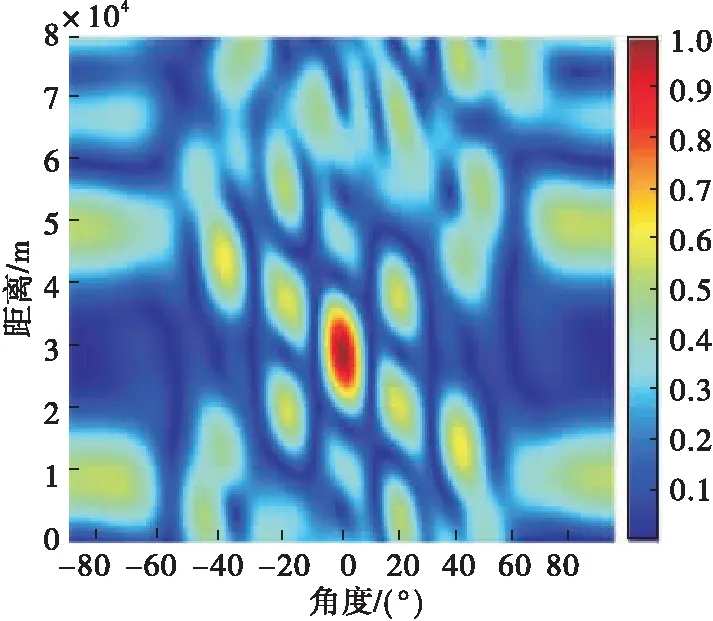
圖2 sin-FDA波束圖
本文主要研究TR技術對sin-FDA-MIMO的DOA估計精度的影響。
1 sin-FDA-MIMO雷達接收信號模型
為不失一般性,假設sin-FDA-MIMO雷達發射部分與接收部分位于同一位置且都為均勻線性陣列。sin-FDA-MIMO雷達發射陣元個數為M,接收陣元個數為N,陣元間距均為d,陣元間的頻率增量為Δf。sin-FDA-MIMO雷達發射接收模型結構如圖3所示。
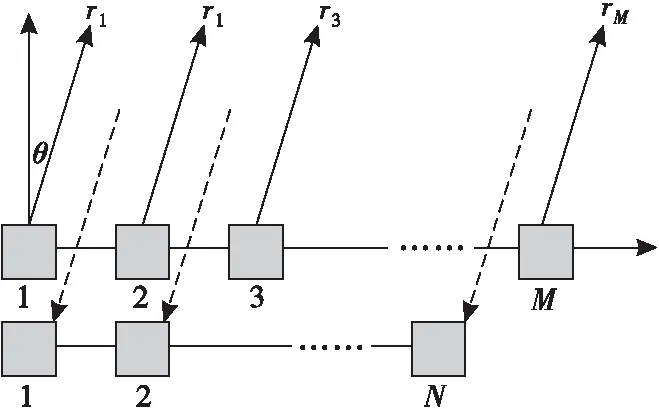
圖3 sin-FDA-MIMO模型
發射陣列上第i個陣元發射的信號為:
fi(t)=si(t)ej2π[f0+sin (i-1)Δf]t
(1)
式中:si(t)為第i個發射陣元的發射波形。
假設目標符合遠場條件,且有K個遠場目標,則sin-FDA-MIMO第j個接收陣元接收到的信號為:
(2)

(3)
式中:Rk為第k個遠場目標與陣列的距離;θk為第k個遠場目標與陣列的夾角;c為光速。假設陣元的發射信號為窄帶信號,則有:
(4)
假設各陣元發射信號的波形相互正交,滿足:
(5)
式中:τ表示在脈沖持續時間內的時移。經過接收機內部的匹配濾波處理,可以得到接收信號導向矢量信息。對應的接收導向矢量和發射導向矢量的表達式分別為:
(6)
(7)
(8)
a(θk,rk)=ar(rk)⊙aθ(θk)
(9)
式中:⊙表示Hardamard積。對應目標信號矢量表達式如下:
(10)
式中:?表示Kronecker積;N∈CMN×1,是信號的噪聲空間;b(θk)∈CN×1是信號接收矢量;a(θk,rk)∈CM×1為發射矢量。
由此,式(2)可以重新寫為:
(11)
式中:接收信號矩陣表達式為r(t)=[r1(t),r2(t),…,rN(t)]T;發射信號向量表達式為f(t)=[f1(t),f2(t),…,fM(t)]T。
2 基于TR的接收信號模型
在sin-FDA-MIMO中,將接收矩陣r(t)經過共軛,時間反轉后再次發射,則再次發射的探測信號可以表示為:
(12)
sin-FDA-MIMO再次接收到的信號為:
aH(θk,rk)f*(-t)+v(t)
(13)
式中:w(t)是TR探測時的噪聲;v(t)是探測信號中的噪聲n(t)與w(t)的復合噪聲。將rr(t)經過匹配濾波處理后的目標信號矢量為:
(14)

3 基于TR的距離角度聯合估計
3.1 Capon算法
Capon算法原理是在維持期望目標空間位置信號功率不變的基礎上,使得噪聲及期望目標空間位置以外的干擾信號功率最小。Capon算法的空間譜可寫為:
(15)
通過式(14)對功率譜譜峰進行搜索可得對應的角度和距離。
對于sin-FDA-MIMO普通接收信號模型,式(14)中的ax=b(θk)?a(θk,rk)。
R=E[yHy]
(16)
對于TR的sin-FDA-MIMO接收信號模型,式(15)中的ax=a*(θk,rk)?a(θk,rk)。
R=E[yrHyr]
(17)
sin-FDA-MIMO雷達的DOA估計實現了目標角度和距離的二維估計,使得對目標在空間中定位變為可能。
TR-Capon算法較常規Capon算法,顯著提高了目標參數估計的精度。同時,該算法利用回波信號,使其在目標處具有聚焦特性。這些表明基于TR的DOA估計算法具有良好的效果。
3.2 MUSIC算法
陣列協方差矩陣R經過特征值分解可化為信號空間和噪聲空間兩部分。
(18)
由噪聲特征矢量與和信號特征矢量正交關系,得到空間譜表達式:
(19)
對于sin-FDA-MIMO接收信號模型,式(19)中的ax=b(θk)?a(θk,rk),陣列協方差矩陣形如式(15)所示。
對于TR sin-FDA-MIMO接收信號模型,式(19)中的ax=a*(θk,rk)?a(θk,rk),陣列協方差矩陣形式如(17)所示。
4 仿真試驗
為了對比sin-FDA-MIMO與基于TR技術的sin-FDA-MIMO雷達距離角度估計特性,分別針對單目標和雙目標進行仿真實驗。設發射陣列陣元數為10,接收陣列陣元數為10。陣列陣元間距d=λ/2,載頻f0=9 GHz,頻率增量Δf=10 kHz,信噪比為0 dB,快拍數L=200。
4.1 單目標
假設目標位置位于(30°,50 km),圖4為sin-FDA-MIMO的Capon譜MUSIC譜、TR-Capon譜和TR-MUSIC譜。圖5為4種距離角度估計算法的均方根誤差(RMSE)比較。設置300次蒙特卡洛試驗,信噪比間隔設置為2 dB。

圖4 單目標距離角度估計
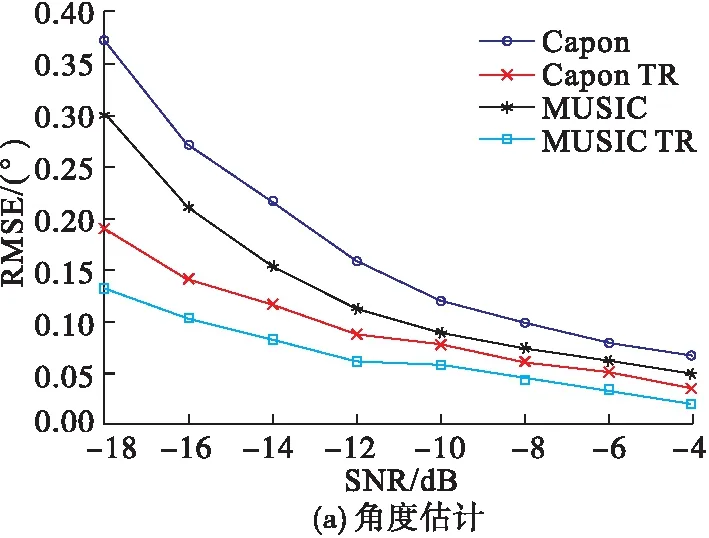
圖5 均方根誤差變化情況
計算角度RMSE公式如下:
(20)
計算距離RMSE公式如下:
(21)
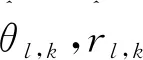
從圖4可以看出4種DOA估計方法得到的不同樣式的空間譜,TR-Capon和TR-MUSIC得到的空間譜與常規接收信號模型下的Capon和MUSIC算法相比,具有更高的空間估計聚集性和更低的旁瓣分布。
圖5實驗結果顯示TR-Capon和TR-MUSIC在角度和距離估計的RMSE都較Capon和MUSIC算法有明顯的下降,驗證了TR技術對提高DOA估計的有效性。
4.2 空間位置接近的雙目標
假設目標位置位于(20°,28 km)和(23°,30 km),圖6為處于相近空間位置的兩個目標的空間譜估計。可以看出普通Capon和MUSIC的空間譜分辨不出空間中的兩個目標,而基于TR技術的Capon和MUSIC的空間譜則能夠明顯區分。
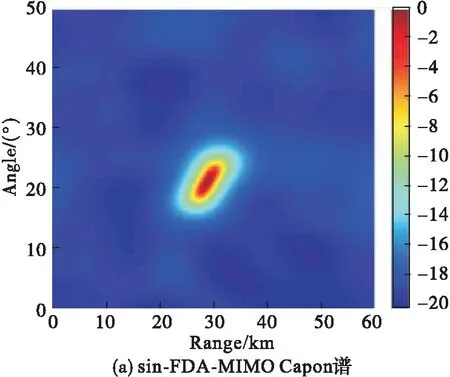
圖6 雙目標距離角度估計
圖7為4種參數估計算法在不同信噪比條件下的均方根誤差(RMSE)比較。設置300次蒙特卡洛試驗,信噪比間隔設置為2 dB。圖7定量地說明了TR技術對相近空間位置的兩個目標的空間估計能力有顯著提高。
圖7 均方根誤差變化情況
5 結語
TR技術對于sin-FDA-MIMO的距離角度聯合估計精度有較顯著的提高,且對于空間位置相近的目標有較強的分辨能力。
本文建立了sin-FDA-MIMO模型,該模型可以實現在距離和角度上進行二維估計。在傳統Capon和MUSIC算法的基礎上,將TR技術分別融入這2種算法,并對這4種算法進行了距離角度估計精度的比較,通過計算不同信噪比下各算法的RMSE,驗證了TR技術對提高二維估計精度的有效性,為提高sin-FDA-MIMO雷達在距離和角度估計精度提供了一定的參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03