基于RNN-LSTM 的船舶位置預(yù)測(cè)分析?
2021-03-22 09:11:40張玉人龔志猛
計(jì)算機(jī)與數(shù)字工程 2021年2期
張玉人 龔志猛
(1.中國(guó)科學(xué)院福建物質(zhì)結(jié)構(gòu)研究所 福州 350608)(2.華信咨詢?cè)O(shè)計(jì)研究院有限公司 杭州 310052)
1 引言
船舶在開(kāi)闊的航道區(qū)間內(nèi)航行時(shí),很難用一個(gè)確定的線性關(guān)系去描述船舶的運(yùn)動(dòng)情況。通常,研究人員采用馬爾科夫過(guò)程來(lái)建立船舶航行軌跡預(yù)測(cè)非線性系統(tǒng)模型,但該模型結(jié)合軌跡數(shù)據(jù)建立多特征模型的復(fù)雜度較高,也無(wú)法記憶較長(zhǎng)歷史時(shí)間跨度的信息[1]。而神經(jīng)網(wǎng)絡(luò)通過(guò)模擬人腦的神經(jīng)網(wǎng)絡(luò)基本結(jié)構(gòu)進(jìn)行自主學(xué)習(xí)與訓(xùn)練,能夠較好地完成非線性數(shù)據(jù)的處理工作,具有優(yōu)異的非線性擬合能力。船舶航行過(guò)程中,由于GPS設(shè)備采集到的數(shù)據(jù)具有時(shí)序性,而且地理位置之間存在著上下文關(guān)聯(lián),使得循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)應(yīng)用成為可能。利用RNN 學(xué)習(xí)當(dāng)前環(huán)境和既有時(shí)刻基礎(chǔ)上的船舶運(yùn)動(dòng)規(guī)律,然后進(jìn)行航跡預(yù)測(cè)。這既避免了傳統(tǒng)算法中繁雜的建模過(guò)程,又保證了所建立的模型符合實(shí)際邏輯。一個(gè)完善的RNN 模型可以預(yù)測(cè)任意復(fù)雜、期望的序列,但標(biāo)準(zhǔn)的循環(huán)神經(jīng)網(wǎng)絡(luò)模型不能存儲(chǔ)過(guò)多的歷史信息[2~3]。在一定的歷史時(shí)間跨度下,歷史記憶的長(zhǎng)短關(guān)乎模型預(yù)測(cè)的準(zhǔn)確度。基于上述考慮,為了能夠記憶更長(zhǎng)歷史時(shí)間跨度的信息,并能在一定誤差范圍內(nèi)運(yùn)行穩(wěn)定,本文采用了基于長(zhǎng)短型記憶循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN-LSTM)模型來(lái)預(yù)測(cè)船舶下一位置。并不是每個(gè)歷史軌跡點(diǎn)位都是重要的,只有在一段時(shí)間內(nèi)有諸多點(diǎn)位數(shù)據(jù)聚集在某個(gè)區(qū)域才有意義,這個(gè)區(qū)域也稱為目標(biāo)位置。為降低系統(tǒng)的復(fù)雜度,本文采用了DBSCAN聚類算法來(lái)提取歷史軌跡中的目標(biāo)位置序列作為預(yù)測(cè)模型的輸入,并利用Embedding 與LSTM 雙層預(yù)測(cè)模型訓(xùn)練出船舶位置預(yù)測(cè)模型。
2 船舶位置預(yù)測(cè)技術(shù)概述
2.1 RNN-LSTM模型
循環(huán)神經(jīng)網(wǎng)絡(luò)在進(jìn)行訓(xùn)練時(shí),往往為降低模型的復(fù)雜度,只會(huì)選取若干個(gè)隱藏層,而非整個(gè)隱藏層作為記憶單元,這樣會(huì)導(dǎo)致在長(zhǎng)時(shí)段歷史數(shù)據(jù)上下文語(yǔ)義信息挖掘應(yīng)用方面存在缺陷,無(wú)法做長(zhǎng)時(shí)序數(shù)據(jù)挖掘。基于上述原因,Hochreiter 和Schmidhu?ber等提出了長(zhǎng)短型循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN-LSTM)[4~5]。RNN-LSTM相較于傳統(tǒng)循環(huán)神經(jīng)網(wǎng)絡(luò),它從設(shè)計(jì)上就避免了時(shí)序數(shù)據(jù)預(yù)測(cè)過(guò)程中長(zhǎng)短時(shí)依賴問(wèn)題,而設(shè)計(jì)的關(guān)鍵就是隱藏層中獨(dú)特的記憶單元結(jié)構(gòu)。如圖1 所示,為RNN-LSTM 隱藏層記憶單元結(jié)構(gòu),該結(jié)構(gòu)包含了三種門,分別是輸入門(Input Gate)、遺忘門(Forget Gate)、輸出門(Output Gate)。
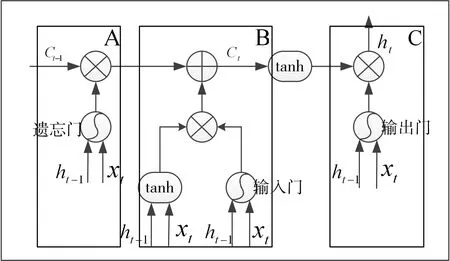
圖1 RNN-LSTM隱藏層記憶單元結(jié)構(gòu)
將RNN-LSTM 隱藏層記憶單元結(jié)構(gòu)比作一個(gè)記憶細(xì)胞(memory cell),該細(xì)胞控制著記憶單元中信息的傳播途徑。其中A區(qū)域表示遺忘區(qū),其中遺忘門(Forget Gate)接收來(lái)自上一時(shí)刻隱藏層的輸出(ht-1)和當(dāng)前時(shí)刻輸入(xt)并決定丟棄當(dāng)前狀態(tài)下部分信息;B 區(qū)域表示更新區(qū),它決定了當(dāng)前狀態(tài)需要存儲(chǔ)哪些新的信息,并完成記憶細(xì)胞的信息更新;C區(qū)域表示輸出區(qū),其中輸出門(Output Gate)決定了當(dāng)前狀態(tài)下細(xì)胞輸出的內(nèi)容。
根據(jù)以上分析,在t時(shí)刻,為了計(jì)算傳給下一個(gè)記憶細(xì)胞的Ct,ht,現(xiàn)列出記憶單元中輸入狀態(tài)和三個(gè)門狀態(tài):
Input Gate:

Forget Gate:

Output Gate:

狀態(tài)輸入:

進(jìn)而求出輸出狀態(tài)Ct和隱藏層輸出ht

綜上,RNN-LSTM 通過(guò)門的控制,解決了時(shí)序數(shù)據(jù)預(yù)測(cè)過(guò)程中長(zhǎng)短時(shí)依賴問(wèn)題,這對(duì)于長(zhǎng)時(shí)段歷史數(shù)據(jù)預(yù)測(cè)研究有很好的幫助。
2.2 DBSCAN聚類算法
1996 年Ester M 等[6]提 出 了DBSCAN 聚 類 算法,該算法是一種基于點(diǎn)的周圍密度形成集群的聚類方法。在每個(gè)聚類的中,可以利用聚類的密度特點(diǎn),找出任意形態(tài)的簇,它們滿足簇內(nèi)的點(diǎn)密度明顯高于簇外點(diǎn)的密度這一條件。即DBSCAN 聚類算法可表述為:在一個(gè)集合中,定義一個(gè)半徑為Eps的圓,如果這個(gè)圓內(nèi)落入的點(diǎn)的數(shù)目多于所給定最小點(diǎn)數(shù)MinPts,則可通過(guò)Eps 和MinPts 這兩個(gè)參數(shù)來(lái)定義聚類的密度。
關(guān)于DBSCAN聚類算法相關(guān)的概念定義[7~8]。
定義1給定一個(gè)點(diǎn)a,以點(diǎn)a 為圓心,Eps 為半徑得到的圓所在的區(qū)域叫做Eps鄰域。
定義2核心對(duì)象(Core objects),如果點(diǎn)a的Eps鄰域內(nèi)樣本點(diǎn)數(shù)b 大于所給定最小點(diǎn)數(shù)Minpts,則稱a 為核心對(duì)象,b 稱為核心點(diǎn)。若樣本點(diǎn)落在在Eps鄰域的邊界上,則稱b為邊界點(diǎn)。
定義3直接密度可達(dá)(Directly density reach?able),給定一個(gè)樣本集合D={d1,d2,…,dn},如果點(diǎn)di的Eps 鄰域內(nèi)樣本點(diǎn)數(shù)為b,且d1為核心對(duì)象,那么Eps鄰域內(nèi)樣本點(diǎn)到di直接密度可達(dá)。
定義4密度可達(dá)(Density reachable),對(duì)于一個(gè)樣本集合D={d1,d2,…,dn} ,給定數(shù)據(jù)樣本集{p1,p2,…,pn}其中p=p1,q=pn,又假設(shè)樣本點(diǎn)pi至pi-1直接密度可達(dá),則對(duì)象q至對(duì)象p密度可達(dá)。
定義5密度相連(Density connected),對(duì)于一個(gè)樣本集合D={d1,d2,…,dn},假設(shè)在數(shù)據(jù)樣本集P={p1,p2,…,pn}樣本點(diǎn)pi至pj在樣本集合P 中的一點(diǎn)d 密度可達(dá),那么樣本點(diǎn)pi和pj密度相連。假設(shè)樣本集合D 中存在一個(gè)對(duì)象a,使得樣本對(duì)象p 至q 從對(duì)象a 密度可達(dá),則對(duì)象q 和p 密度相連。由此可知,密度相連是對(duì)稱關(guān)系,密度可達(dá)是直接密度可達(dá)的傳遞閉包。
以上基本介紹了DBSCAN相關(guān)定義、聚類原則等。DBSCAN 具有良好的去噪聲能力,能夠根據(jù)點(diǎn)位的疏密程度去除掉其中的噪聲區(qū)域。此外,DB?SCAN 初始值對(duì)聚類結(jié)果影響不大。基于上述優(yōu)點(diǎn),本文選用DBSCAN作為船舶位置停留點(diǎn)聚類提取方法。
3 船舶位置預(yù)測(cè)分析
3.1 船舶位置預(yù)測(cè)框架
RNN-LSTM相較于傳統(tǒng)循環(huán)神經(jīng)網(wǎng)絡(luò),它從設(shè)計(jì)上就避免了時(shí)序數(shù)據(jù)預(yù)測(cè)過(guò)程中長(zhǎng)短時(shí)依賴問(wèn)題,而設(shè)計(jì)的關(guān)鍵就是隱藏層中獨(dú)特的記憶單元結(jié)構(gòu)。該結(jié)構(gòu)在增長(zhǎng)了記憶范圍的同時(shí),能適當(dāng)?shù)膾仐壟f信息。圖2 為本文基于RNN-LSTM 神經(jīng)網(wǎng)絡(luò)構(gòu)建的船舶軌跡預(yù)測(cè)框架。

圖2 基于RNN-LSTM的船舶軌跡預(yù)測(cè)框架
由圖2可知,基于RNN-LSTM 神經(jīng)網(wǎng)絡(luò)構(gòu)建的船舶軌跡預(yù)測(cè)框架主要由Embedding層[9]、LSTM模塊構(gòu)成,下面詳細(xì)介紹這兩個(gè)模塊。
1)Embedding層
正如圖2 所示,本文通過(guò)DBSCAB 聚類算法提取目標(biāo)位置,得到了船舶航行目標(biāo)位置序列。這些目標(biāo)位置被賦予唯一的標(biāo)識(shí)1,2,3,…,k 。因此可以將目標(biāo)位置序列轉(zhuǎn)化成索引時(shí)序序列,例如1表示港口A,2表示航道B,3表示臨時(shí)拋錨點(diǎn)C,4表示目的地港口D。假設(shè)一條船舶m 從港口A 出發(fā),途徑航道B,行駛到C 點(diǎn)進(jìn)行拋錨作業(yè)。但是也可能有另一條船舶n 從港口A 出發(fā),途徑航道B,行駛到目的地港口D。由此可知,船舶m 的航行軌跡向量可表示為[1,2,3],船舶n 的軌跡向量表示為[1,2,4]。通過(guò)歐式距離公式計(jì)算出的相似度顯然非常接近統(tǒng)一軌跡,若已知臨時(shí)拋錨點(diǎn)C 和目的地港口D方向相反,這樣得出的預(yù)測(cè)結(jié)果與實(shí)際情況大相徑庭。這樣可以說(shuō)明一個(gè)事實(shí),那就是如果單純用索引時(shí)序序列來(lái)標(biāo)識(shí)目標(biāo)位置,將不可能得到一個(gè)好的預(yù)測(cè)結(jié)果。而本文,為解決上述問(wèn)題,采用了自然語(yǔ)言中的word2vec模型內(nèi)的Skip-gram 算法[10~11],用多維的方式將每一個(gè)目標(biāo)位置對(duì)應(yīng)一個(gè)特征向量,這樣為區(qū)別目標(biāo)位置提供了更詳細(xì)的區(qū)分度與可能性。
根據(jù)Skip-gram算法,相關(guān)參數(shù)定義如下[12~13]。
由歷史軌跡數(shù)據(jù)提取出來(lái)的目標(biāo)位置集合Q;
目標(biāo)位置L:其為列向量,長(zhǎng)度為k;
目標(biāo)位置窗口C:以選取目標(biāo)位置序列中一個(gè)元素為中心,上下文寬度為j(向前和向后j 個(gè)目標(biāo)位置)組成的部分軌跡;
條件概率P(C|Li):表示目標(biāo)位置Li出現(xiàn)的時(shí)候,目標(biāo)窗口部分軌跡c 出現(xiàn)的概率,其中C(Li)表示所有目標(biāo)窗口中包含了目標(biāo)位置Li的集合。
給定模型參數(shù)θ,尋求模型參數(shù)最大化條件概率乘積如下:

再利用softmax[43]函數(shù)對(duì)θ 進(jìn)行處理,將條件概率公式轉(zhuǎn)換成下列公式:
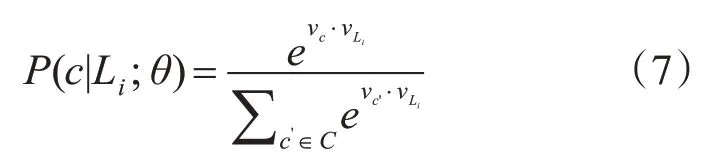
式中,vc、vLi分別表示維度為k的列向量。
通過(guò)上述模型表達(dá)式可知,模型訓(xùn)練時(shí),其將每一個(gè)目標(biāo)位置用多維特征向量表示,并使得其在目標(biāo)窗口內(nèi)條件概率P(C|Li)最大化。由此就可以得出結(jié)論,只有特定的目標(biāo)位置L 才能匹配到特定的目標(biāo)窗口C。
2)LSTM模塊
現(xiàn)結(jié)合船舶預(yù)測(cè)模型,詳細(xì)介紹LSTM 模塊的工作流程如下。
細(xì)胞遺忘過(guò)程:很多時(shí)候,在基于許多已有的歷史軌跡屬性都已經(jīng)存入在隱藏層記憶單元結(jié)構(gòu)—記憶細(xì)胞內(nèi),當(dāng)預(yù)測(cè)船舶下一目標(biāo)位置時(shí),可以立馬找到相應(yīng)的細(xì)胞狀態(tài)。但是當(dāng)有新的輸入時(shí),這就需要去清除較舊的上下文軌跡信息,這就需要通過(guò)遺忘門來(lái)實(shí)現(xiàn)。
細(xì)胞狀態(tài)更新:這一過(guò)程是決定當(dāng)前狀態(tài)需要存儲(chǔ)哪些新的信息,并完成記憶細(xì)胞的信息更新。其主要分為兩步,一步是輸入門輸入新的值,它決定需要更新什么值;另一步是Tanh 層建立了一個(gè)候選值向量[14]。通過(guò)狀態(tài)更新,使得新增加的目標(biāo)位置添加到細(xì)胞狀態(tài)中去,以便代替需要被遺忘的信息。
細(xì)胞輸出:也就是輸出門,它決定了當(dāng)前狀態(tài)下細(xì)胞輸出的信息[15]。首先通過(guò)Sigmod 層來(lái)確定細(xì)胞內(nèi)哪些信息會(huì)被輸出,然后將這些信息做Tanh 處理,將得到的結(jié)果與Sigmod 門的輸出相乘,進(jìn)而最終得到要輸出的信息,也就是本文要求得的船舶目標(biāo)位置概率向量。
結(jié)合上文對(duì)Embedding 層和LSTM 模塊的詳細(xì)分析可知,本文將離散的目標(biāo)位置序列作為輸入,送入Embedding 層進(jìn)行計(jì)算,從而將目標(biāo)位置轉(zhuǎn)換成一個(gè)固定長(zhǎng)度的特征向量。再將Embedding 層全部輸出結(jié)果送入LSTM 模塊內(nèi)進(jìn)行遍歷,不斷調(diào)整模型參數(shù),最終使得模型預(yù)測(cè)下一目標(biāo)位置成為可能。預(yù)測(cè)算法實(shí)現(xiàn)流程的偽代碼如下。
算法名:基于RNN-LSTM的船舶位置預(yù)測(cè)算法
Input:A set of trajectory
Process:
1:X=generateSeqSample(trajectory);
2:Y=generateNextPlace(trajectory);
3:model=sequential();
4:model.add(Embedding());
5:model.add(LSTM());
6:model.add(Dropout);
7:model.add(Dense);
8:model.add(Activation);
9:model.compile(loss=,optimizer=);
10:model.fit(X,Y);
11:model.evelate();
Output:an index of future target location
前期通過(guò)DBSCAB 聚類算法提取目標(biāo)位置,得到了船舶航行目標(biāo)位置序列。為了訓(xùn)練預(yù)測(cè)模型,第1、2 行代碼分別表示了目標(biāo)位置序列樣本輸入和目標(biāo)位置對(duì)應(yīng)的下一位置。由于本文所提預(yù)測(cè)模型是一個(gè)線性模型,所以創(chuàng)建了一個(gè)Sequential模型(第3 行)。接下來(lái)是創(chuàng)建Embedding 層和LSTM 模塊,以用來(lái)構(gòu)建目標(biāo)位置特征向量和模型訓(xùn)練(第4、5 行)。與此同時(shí),要選好模型使用的激活函數(shù)以及做好措施防止過(guò)擬合問(wèn)題(第6、7、8行)。最后是模型預(yù)測(cè)效果驗(yàn)證,將訓(xùn)練好的模型代入待測(cè)試的數(shù)據(jù),來(lái)預(yù)測(cè)下一步船舶可能出現(xiàn)的位置(第9、10 行)。需要強(qiáng)調(diào)的是,此模型的輸出并非是一個(gè)確定的地點(diǎn),而是一個(gè)概率分布,所以需要根據(jù)概率借助索引找到最有可能的目標(biāo)位置(第11行)。
3.2 船舶下一位置預(yù)測(cè)
前一小節(jié)詳細(xì)介紹了船舶位置預(yù)測(cè)框架流程,但未將LSTM 模塊中如何預(yù)測(cè)加以詳述。本節(jié)將詳細(xì)推導(dǎo)從部分歷史目標(biāo)位置序列來(lái)預(yù)測(cè)船舶下一位置這一過(guò)程。如圖3 所示,為簡(jiǎn)化后的循環(huán)神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)結(jié)構(gòu)模型,只展示出了隱藏層結(jié)構(gòu)。
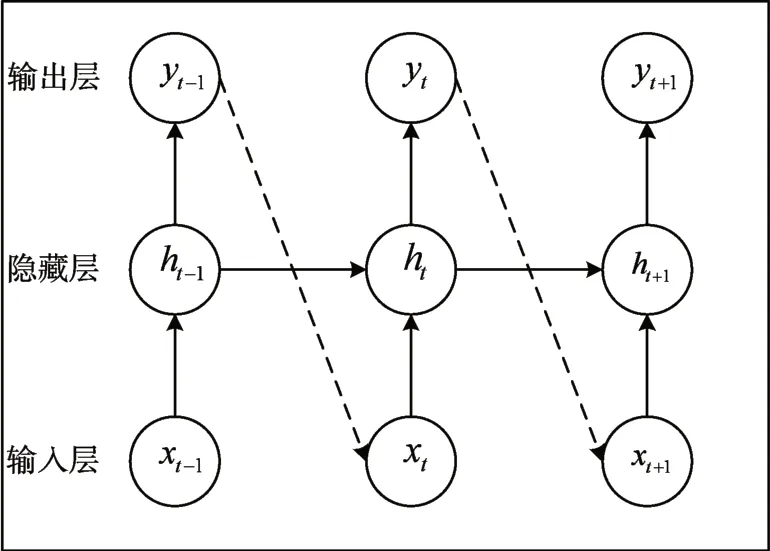
圖3 循環(huán)神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)結(jié)構(gòu)模型
目標(biāo)位置序列經(jīng)由Embedding 層計(jì)算之后,使得目標(biāo)位置轉(zhuǎn)換成相應(yīng)的多維特征向量X=[x1,x2,…,xT],接著將這些多維特征向量送入擁有N 層隱藏層線性結(jié)構(gòu)的RNN 中去,通過(guò)迭代計(jì)算得到n層隱藏層線性輸出為,最終經(jīng)由輸出層得到目標(biāo)序列Y=[y1,y2,…,yT]。目標(biāo)序列中,每一個(gè)元素yi都是一個(gè)M維向量,其中每一維對(duì)應(yīng)下一目標(biāo)位置的概率。而本文則是利用得到的目標(biāo)序列中每一個(gè)結(jié)果向量yt與下一個(gè)目標(biāo)位置特征向量xt+1得出預(yù)測(cè)分布Pr(xt+1|yt)。
由于本文所設(shè)計(jì)的模型框架只有一層LSTM隱藏層,所以從t=1 至t=T 時(shí)刻(一般目標(biāo)位置序列中第一個(gè)元素為空值),隱藏層內(nèi)激活函數(shù)迭代計(jì)算公式如下:

式中,H 為激活函數(shù),w 為輸入層與隱藏層之間的權(quán)值,b 為偏移值。
在得到隱藏層輸出后,需要在輸出層計(jì)算船舶位置預(yù)測(cè)概率,公式如下:

式中,φ(?)是一種將輸出結(jié)果yt參數(shù)化預(yù)測(cè)分布Pr(xt+1|yt)的輸出函數(shù)。通常在實(shí)際數(shù)據(jù)中難以尋找到一個(gè)合適的預(yù)測(cè)概率分布,而本文可得到一個(gè)目標(biāo)位置序列Traj 的概率公式如下:

訓(xùn)練模型的損失函數(shù)如下:

4 實(shí)驗(yàn)結(jié)果與分析
4.1 實(shí)驗(yàn)數(shù)據(jù)集
研究過(guò)程中實(shí)驗(yàn)數(shù)據(jù)是由自主設(shè)計(jì)的GPS 采集設(shè)備獲得。實(shí)驗(yàn)采集設(shè)備一共有5 個(gè)GPS 信標(biāo),選取了其中3 個(gè)測(cè)量精度較好的信標(biāo)。實(shí)驗(yàn)數(shù)據(jù)統(tǒng)計(jì)見(jiàn)表1所示。
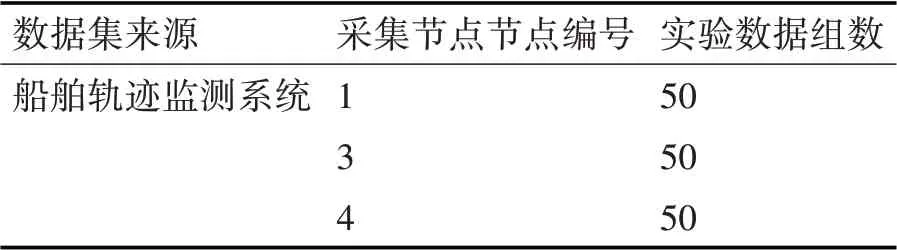
表1 實(shí)驗(yàn)數(shù)據(jù)集
為保證實(shí)驗(yàn)的真實(shí)性,本實(shí)驗(yàn)場(chǎng)地選在無(wú)錫市長(zhǎng)廣溪國(guó)家濕地公園,實(shí)驗(yàn)數(shù)據(jù)源一共包含了3 個(gè)實(shí)驗(yàn)GPS 節(jié)點(diǎn)(模擬3 條船只),共計(jì)150 條軌跡軌跡信息,且平均每條軌跡包含了180 個(gè)GPS 軌跡點(diǎn)。由于GPS 采集設(shè)備精度以及冷啟動(dòng)等因素的存在,該系統(tǒng)所采集到的位置數(shù)據(jù)中可能存在異常值。為避免這些異常值對(duì)后續(xù)各算法流程的影響,在軟件設(shè)計(jì)時(shí),就采用了偏移處理算法濾除了這些異常值。同時(shí)為抑制采集系統(tǒng)中的高斯噪聲,所有采集到的軌跡數(shù)據(jù)均利用擴(kuò)展卡爾曼濾波算法的船舶位置數(shù)據(jù)預(yù)處理模型來(lái)做船舶GPS 數(shù)據(jù)預(yù)處理。
4.2 評(píng)價(jià)指標(biāo)
本小節(jié)所介紹的評(píng)價(jià)指標(biāo)是用于權(quán)衡基于循環(huán)神經(jīng)網(wǎng)絡(luò)的船舶軌跡預(yù)測(cè)的實(shí)驗(yàn)結(jié)果。主要評(píng)價(jià)指標(biāo)包括準(zhǔn)確率(precision)、召回率(recall rate)和F值(F-measure)。
假設(shè)實(shí)驗(yàn)中預(yù)測(cè)結(jié)果集為Q,其中準(zhǔn)確的結(jié)果集為T,則相應(yīng)的實(shí)驗(yàn)評(píng)價(jià)指標(biāo)公式如下:
式(13)是準(zhǔn)確率,表示預(yù)測(cè)結(jié)果集Q 中正確結(jié)果所占比例。

式(14)是召回率,表示準(zhǔn)確的結(jié)果集T 中正確結(jié)果所占比例。

式(15)是綜合評(píng)價(jià)指標(biāo),指準(zhǔn)確率和召回率的調(diào)和平均值。
4.3 船舶位置提取與預(yù)測(cè)結(jié)果
DBSCAN 聚類算法調(diào)節(jié)過(guò)程中包含了Eps 和MinPts 兩個(gè)主要參數(shù)。其中Eps 指鄰域半徑(聚類時(shí)每一個(gè)點(diǎn)),MinPts指以Eps為半徑的鄰域內(nèi)擁有軌跡點(diǎn)的最少個(gè)數(shù)。聚類分析過(guò)程中MinPts 設(shè)定為3,若MinPts ≥3 時(shí),則被視為一個(gè)簇。表2 是調(diào)節(jié)Eps和MinPts兩參數(shù)后DBSCAN聚類效果統(tǒng)計(jì)。
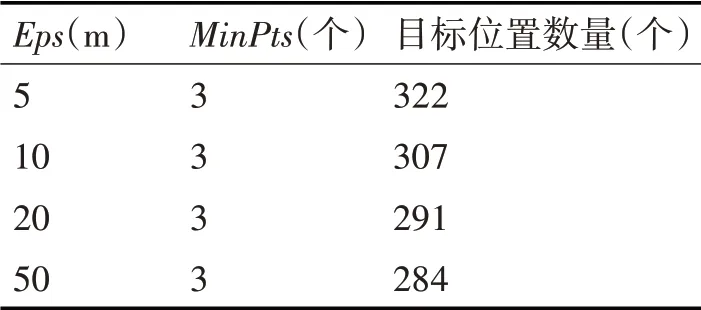
表2 DBSCAN參數(shù)調(diào)節(jié)效果
由表2 可以看出,當(dāng)MinPts 一定時(shí),提取到的目標(biāo)位置數(shù)量隨著Eps 的增大而減小。根據(jù)表中數(shù)據(jù)結(jié)合實(shí)驗(yàn)經(jīng)驗(yàn),現(xiàn)將Eps=20,MinPts=3 作為聚類條件。由此,聚類分析之后,150 條軌跡數(shù)據(jù)提取出了291個(gè)目標(biāo)位置,同時(shí)將整理成50條時(shí)序目標(biāo)位置序列。
通過(guò)聚類分析提取的目標(biāo)位置序列,將作為循環(huán)神經(jīng)網(wǎng)絡(luò)訓(xùn)練模型的數(shù)據(jù)集,用來(lái)進(jìn)行預(yù)測(cè)模型的訓(xùn)練。實(shí)驗(yàn)將取出20%的數(shù)據(jù)集作為測(cè)試數(shù)據(jù),其余將用于預(yù)測(cè)模型訓(xùn)練。
在使用LSTM 進(jìn)行位置預(yù)測(cè)時(shí),會(huì)有多種因素影響著系統(tǒng)的預(yù)測(cè)效果。下面將分不同參數(shù)條件來(lái)討論模型預(yù)測(cè)的準(zhǔn)確率。
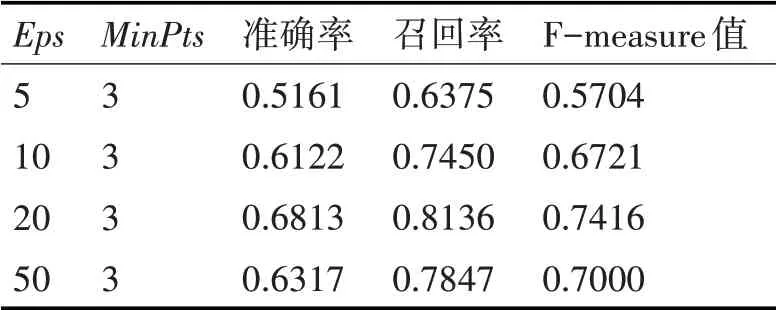
表3 DBSCAN聚類參數(shù)Eps對(duì)預(yù)測(cè)模型的影響
表3 展示了DBSCAN 聚類算法在取不同鄰域半徑Eps 時(shí)對(duì)LSTM 模型預(yù)測(cè)結(jié)果的影響。當(dāng)MinPts為固定值時(shí),隨著Eps的增大,鄰域半徑內(nèi)滿足MinPts條件的軌跡點(diǎn)會(huì)越來(lái)越多,更多的停留點(diǎn)被聚合在了一起,這樣相似的軌跡數(shù)量會(huì)越來(lái)越多,但也會(huì)出現(xiàn)聚類算法能夠提取到的目標(biāo)位置變少的狀況。進(jìn)一步分析可知,當(dāng)Eps 的增大時(shí),正是由于相似的軌跡數(shù)量越來(lái)越多,增強(qiáng)了模型的記憶訓(xùn)練,從而使得預(yù)測(cè)準(zhǔn)確率從51.61%升至68.13%。但Eps 也不是取越大越好,若是越大,會(huì)導(dǎo)致能夠提取到的目標(biāo)位置越來(lái)越少,使得送入模型的目標(biāo)位置序列長(zhǎng)度無(wú)法反映真實(shí)的運(yùn)行軌跡,不利于模型預(yù)測(cè)。

表4 LSTM模型參數(shù)對(duì)預(yù)測(cè)結(jié)果的影響
表4 展示了在進(jìn)行循環(huán)神經(jīng)網(wǎng)絡(luò)數(shù)據(jù)訓(xùn)練時(shí),模型參數(shù)調(diào)節(jié)對(duì)預(yù)測(cè)結(jié)果的影響。由上表可知,其他參數(shù)一定時(shí),隨著模型的迭代次數(shù)、梯度更新塊大小、Embedding 層個(gè)數(shù)的增加,系統(tǒng)的預(yù)測(cè)準(zhǔn)確率也會(huì)提升;其中梯度更新塊增多,會(huì)提升模型的訓(xùn)練速度,也會(huì)使預(yù)測(cè)結(jié)果趨于平穩(wěn)。經(jīng)過(guò)試驗(yàn)調(diào)整,可以看到當(dāng)?shù)螖?shù)設(shè)定為50、梯度更新塊設(shè)定為64、Embedding 層數(shù)設(shè)定為64 時(shí),本文提出的基于RNN-LSTM 的位置預(yù)測(cè)模型擁有較好的預(yù)測(cè)結(jié)果,預(yù)測(cè)準(zhǔn)確率為72.67%。
4.4 實(shí)驗(yàn)結(jié)果對(duì)比
上一小節(jié)已經(jīng)驗(yàn)證了基于RNN-LSTM 的船舶位置預(yù)測(cè)模型的可用性。為了進(jìn)一步驗(yàn)證模型的準(zhǔn)確性與研究的必要性,本文將選取傳統(tǒng)歷史軌跡位置預(yù)測(cè)模型如概率模型或馬爾科夫模型進(jìn)行對(duì)比分析。
為保證本文提出的預(yù)測(cè)模型處于最佳狀態(tài),因此設(shè)定LSTM 模型各參數(shù)依次為:迭代次數(shù)設(shè)定為50、梯度更新塊設(shè)定為64、Embedding 層數(shù)設(shè)定為64。此外,DBSCAN 聚類分析時(shí),設(shè)定鄰域半徑Eps設(shè)定為20、鄰域半徑內(nèi)最少軌跡點(diǎn)數(shù)MinPts 設(shè)定為3。
如圖4、圖5、圖6 分別是各模型準(zhǔn)確率、召回率、F-measure 值對(duì)比分析圖。其中1-MM 是一階馬爾科夫模型、2-MM 是二階馬爾科夫模型、1-VOMM 是一階變階馬爾科夫模型、2-VOMM 是二階變階馬爾科夫模型。由對(duì)比圖可以看出,在準(zhǔn)確度上,LSTM 模型達(dá)到72.67%,高出二階變階馬爾科夫模型13.3%;在召回率上,LSTM 模型達(dá)到81.3%,高出一階變階馬爾科夫模型9.4%;在F-measure 值上LSTM 模型達(dá)到76.47%,高出二階變階馬爾科夫模型12.24%。
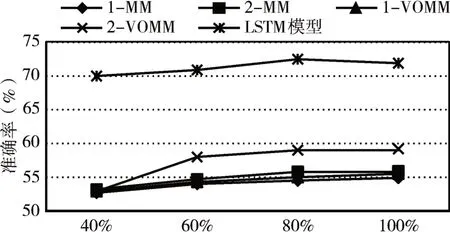
圖4 各模型準(zhǔn)確率對(duì)比

圖5 各模型召回率對(duì)比
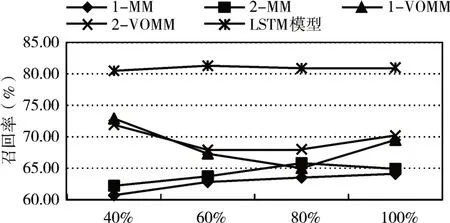
圖6 各模型F-measure值對(duì)比
綜上,基于循環(huán)神經(jīng)網(wǎng)絡(luò)的船舶位置預(yù)測(cè)模型相較于傳統(tǒng)基于馬爾科夫預(yù)測(cè)模型具有較高的預(yù)測(cè)精度,具有一定的研究?jī)r(jià)值。
5 結(jié)語(yǔ)
為解決在長(zhǎng)時(shí)序跨度條件下,針對(duì)傳統(tǒng)馬爾科夫模型預(yù)測(cè)船舶的下一位置精度較低且系統(tǒng)復(fù)雜度較高的問(wèn)題,本文提出了基于長(zhǎng)短型記憶循環(huán)神經(jīng)網(wǎng)絡(luò)的船舶位置預(yù)測(cè)模型。該模型依據(jù)船舶軌跡數(shù)據(jù)龐雜而有序的特點(diǎn),為降低系統(tǒng)復(fù)雜度,采用了新穎的DBSCAN 聚類算法來(lái)提取船舶軌跡數(shù)據(jù)中的目標(biāo)位置序列,同時(shí)為了獲得更好的目標(biāo)位置區(qū)分度,引入了Embedding 層,利用自然語(yǔ)言中的word2vec 模型內(nèi)的Skip-gram 算法,將每一個(gè)目標(biāo)位置用多維特征向量表示,最終將已構(gòu)建好的目標(biāo)位置特征向量送入LSTM 模塊中進(jìn)行模型訓(xùn)練,進(jìn)而利用模型預(yù)測(cè)出下一目標(biāo)位置。實(shí)驗(yàn)結(jié)果表明,所提模型相較于傳統(tǒng)模型具有較高的預(yù)測(cè)準(zhǔn)確性。在后續(xù)的研究中,要綜合考慮不同影響因素對(duì)所建船舶位置預(yù)測(cè)模型造成的影響,并結(jié)合實(shí)際應(yīng)用場(chǎng)景,讓船舶位置預(yù)測(cè)模型較好地進(jìn)行商業(yè)化探索。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
作文周刊·小學(xué)一年級(jí)版(2016年27期)2017-06-03 23:21:17
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
新湘評(píng)論·下半月(2016年4期)2016-05-05 22:12:41
新湘評(píng)論·下半月(2016年4期)2016-05-05 22:12:41