360°鉆機移運軌跡模擬計算分析*
2021-03-22 02:19:26王炳宇王麗君齊明俠
機械研究與應用 2021年1期
關鍵詞:設備
成 斌,王炳宇,孫 軍,王麗君,齊明俠
(蘭州蘭石石油裝備工程股份有限公司 青島分公司,山東 青島 266520)
0 引 言
目前全球發現的海洋巨型油田儲藏的44%位于淺海,中國近海油氣資源近90%都分布在淺海地區[1-6]。所以,淺海對于人類油氣勘探開發具有重要的實際意義,更是全球未來油氣勘探開發的戰略重點之一。人工島鉆機是在淺海油藏區建立的人工島上進行油氣鉆采作業的大型鉆采設備。人工島鉆機配備360°鉆機移運系統,該系統具有任意方向移運和360°旋轉功能,該系統在人工島鉆機搬家時,各模塊無需拆卸即可在叢式井井間快速移運及兩排井之間的轉場,縮短了搬遷時間,提高了鉆機作業效率,降低了鉆井成本。
筆者通過對人工島鉆機移運軌跡進行數據模擬計算分析,優化鉆機移運各個支點的角度及位移,得到最優解。
1 鉆機簡介
人工島鉆機主要由主機模塊、泥漿模塊、動力控制模塊、固定模塊組成。除固定模塊外其他三個模塊都帶有360°移運系統如圖1所示。
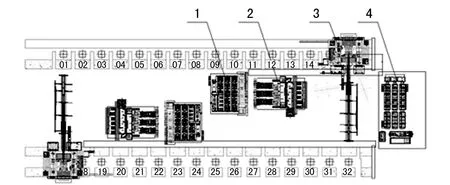
圖1 人工島鉆機總體布局圖
其中鉆機主機模塊由2個支撐架和8個行走機構組成,支撐架和行走機構按照上裝設備的尺寸和載荷分布進行布置,人工島鉆機移運行走機構布置行走機構如圖2、3所示。
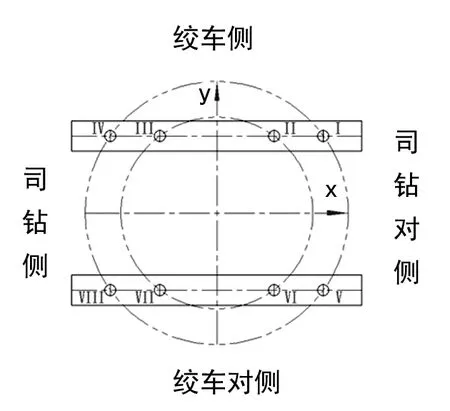
圖2 主機模塊行走機構布置圖
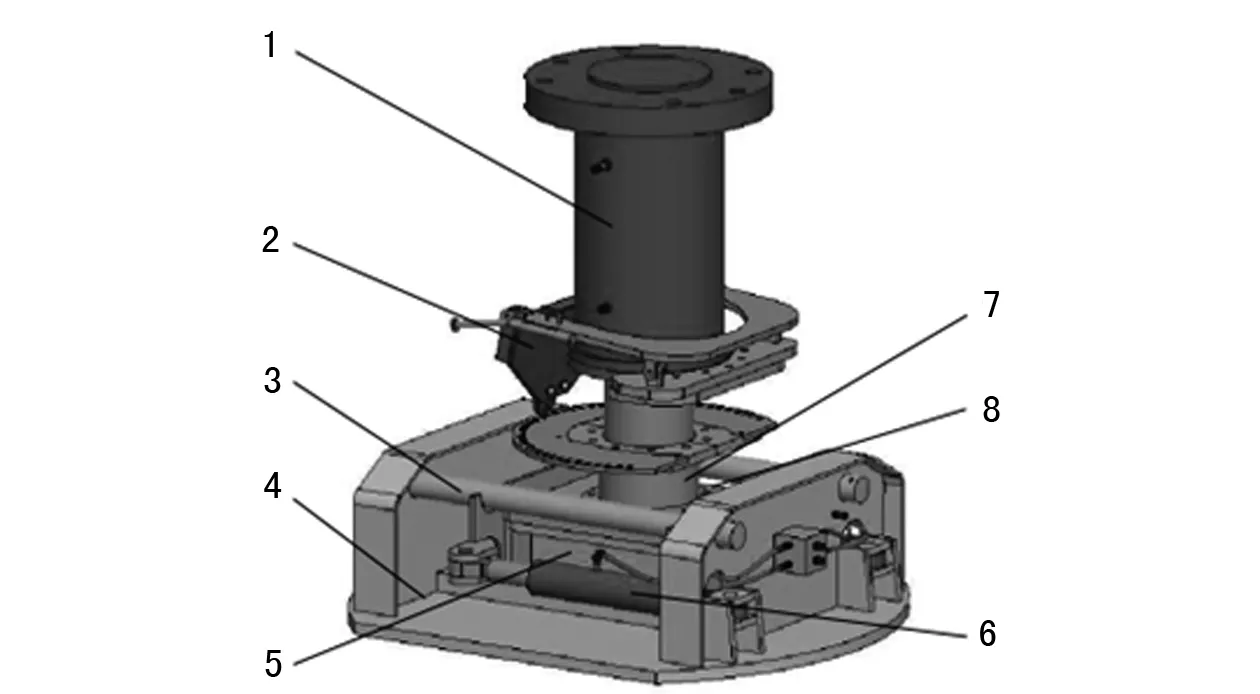
圖3 行走機構結構示意圖
360°鉆機移運系統在進行360°旋轉時需要液壓站提供動力,舉升液壓和步進液缸動作,刻度盤調整精確角度,完成鉆機的360°旋轉。
2 模擬分析
假定人工島鉆機各個模塊為平面剛體(如圖4所示),旋轉中心為O點,現在A點給以垂直于OA方向的驅動。

圖4 剛體旋轉示意圖
設OA長度為R,驅動步長為s。為討論方便,建立坐標系oxy,使OA平行于x軸,坐標原點在O點(如圖5所示)。

圖5 剛體旋轉偏差示意圖
第一次旋轉移動后,A點由A0移動到A1,此時:
xA0=R,yA0=0
xA1=xA0,yA1=yA0+s
轉動角度為:tanα=s/R[7-9]
移動結束后,LOA1=L1發生了變化,變化量為:
因此,需要將旋轉中心由O點改變到O1點,以保證結構尺寸不變,此時:
LO1A1=R
O1點坐標為:
x01=x0+LOcosα
y01=y0+LOsinα
此后,進行第二次移動,A1點將沿O1A1的垂直方向移動s距離至A2點。
x02=x01+LOcos 2α
y02=y01+LOsin 2α
據以上討論,旋轉中心將移動到O2點。重復以上過程至旋轉結束。
中心點On坐標為:
x0n=x0n-1+LOcosnα
y0n=y0n-1+LOsinα
圖6為設備轉動180°的運動軌跡,此時中心點有一定量的偏移。圖7給出了旋轉360°的運動軌跡,此時中心點又回到了原點。

圖6 設備旋轉180°中心軌跡示意圖 圖7 設備旋轉360°中心軌跡示意圖
移運系統實際結構與單點驅動的情況有所不同,移運系統一般布置8個驅動裝置,先假定兩點對稱布置于中心點,沿切向驅動。
設有A、B兩點驅動,對稱布置于中心O點,建立坐標系如圖8所示。
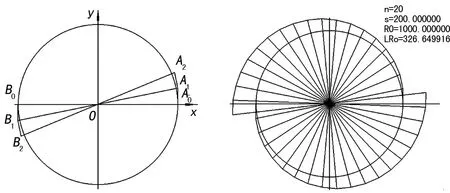
圖8 設備旋轉360°中心軌跡示意圖 圖9 設備旋轉180°A、B兩點軌跡圖
移動過程中,A點由A0運動至A1,B點由B0運動至B1,此時LA1B1>2R,但由于A、B點均固定在結構上,旋轉中心不會發生變化,所產生的位移只能軸間隙補償機構消化。
此后,每次轉動都要產生伸長,圖9顯示了旋轉180°的情況,當s=200,R=1 000 mm時,總會長量為326.6 mm,這將導致旋轉運動無法繼續進行。
當移動步長變小時,伸長量變小,圖10、圖11給出了不同步長時的運動情況。
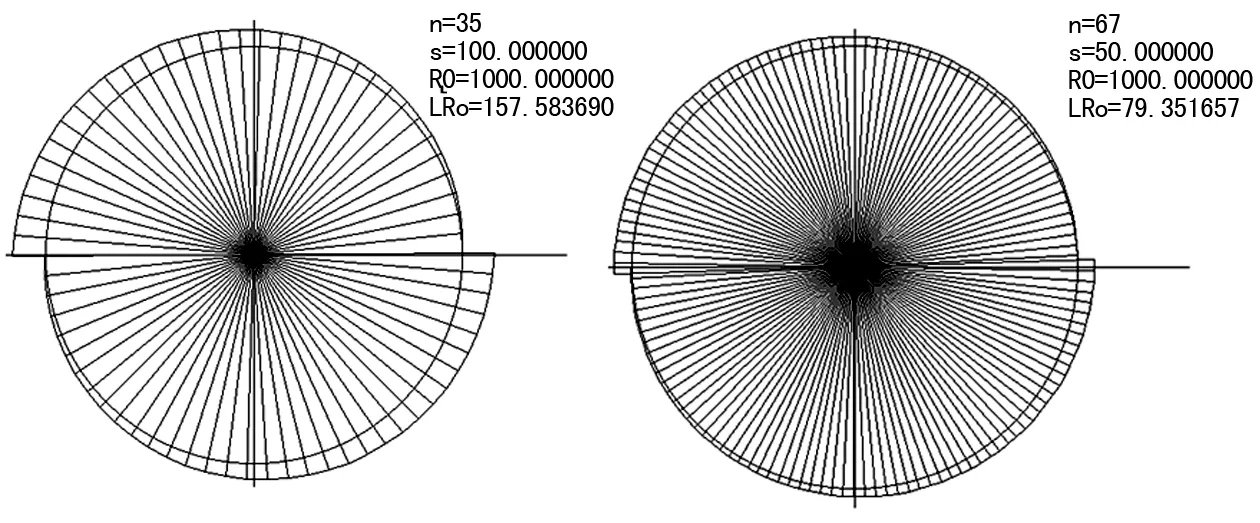
圖10 設備旋轉180°A、B兩點軌跡圖 圖11 設備旋轉180°A、B兩點軌跡圖
當一個結構由8個驅動裝置時,這8個點可以構成一平面幾何圖形,為保證結構在運動前后不發生內部變形,需要提出該平面幾何圖形在運動前后不發生變化。
如圖12所示,一個矩形ACBD,旋轉角度α后,其形狀不能發生任何變化。如提出旋轉中心也不變化的要求,則各點必然要在同一個圓周上,且各點旋轉角度相同。
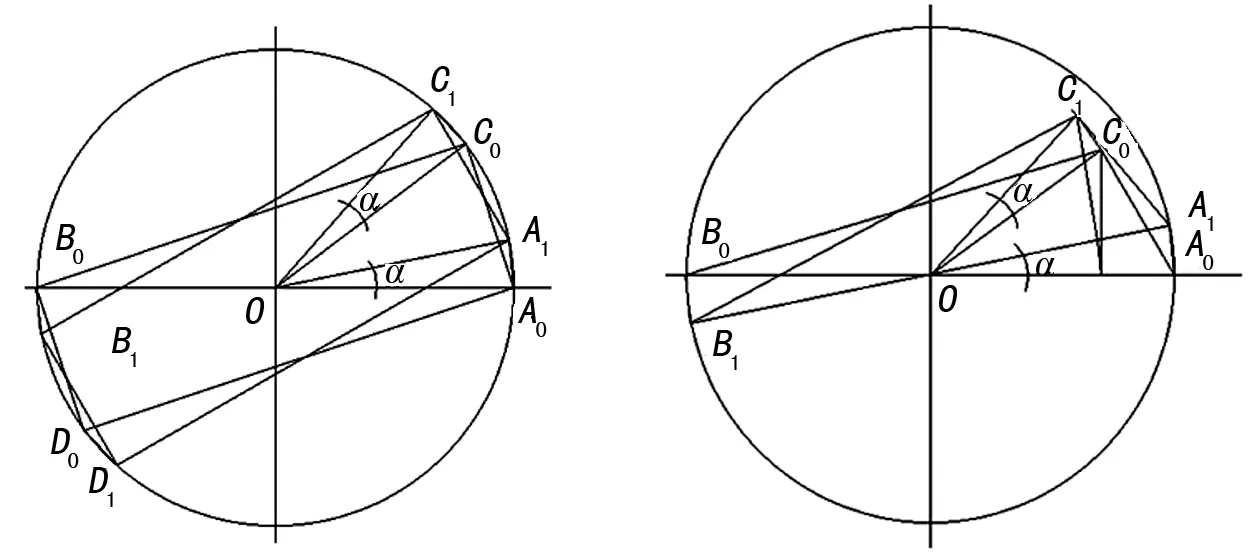
圖12 設備旋轉180°A、B、C、D四點軌跡圖 圖13 設備旋轉180°A、B、C三點軌跡圖
對于各點距旋轉中心距離不等情況,該條件仍然有效。圖13為三角形情況。
為保證步進式旋轉運動的進行,可以有各種實施方案,采用比較簡單的一種,即再加上旋轉中心點不運動的限制。由上節所述由于限定了中心點不運動,各驅動點必然要圍繞旋轉中心旋轉。
如圖14所示,A1點必須在圓周上,因此A0A1不再與OA0垂直。其旋轉半角為:

圖14 A0-A1軌跡圖
由于各驅動機構是固連在結構上的,所以結構在實際運動時,各點的軌跡不是沿直線運動,而是沿圓弧運動。例當A點由A0到A1時,不是沿直線,而是沿圓弧。在運動過程,勢必要產生橫向偏移,該偏移要靠機械間隙補償機構來補償,否則會產生額外的內力,造成設備的損壞。其橫向偏移與結構尺寸和步進行程有關。計算公式為:


圖15 設備旋轉180°A、B、C四點軌跡圖
各驅動機構的行程與該機構到中心點的距離成正比,當行程不與理論值相等時,只要行程的角度正確,不會產生橫向偏移(見圖14中C1C1′線段)但若驅動機械還在工作,會產生軸向推力,設計時也必須考慮。
圖16、17分別是兩種參數的模擬軌跡圖,供參考。合理調整行走機構旋轉角度,如表1所列。
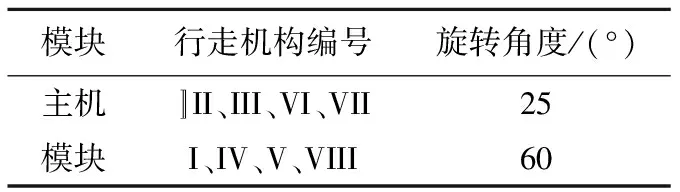
表1 行走機構旋轉角度
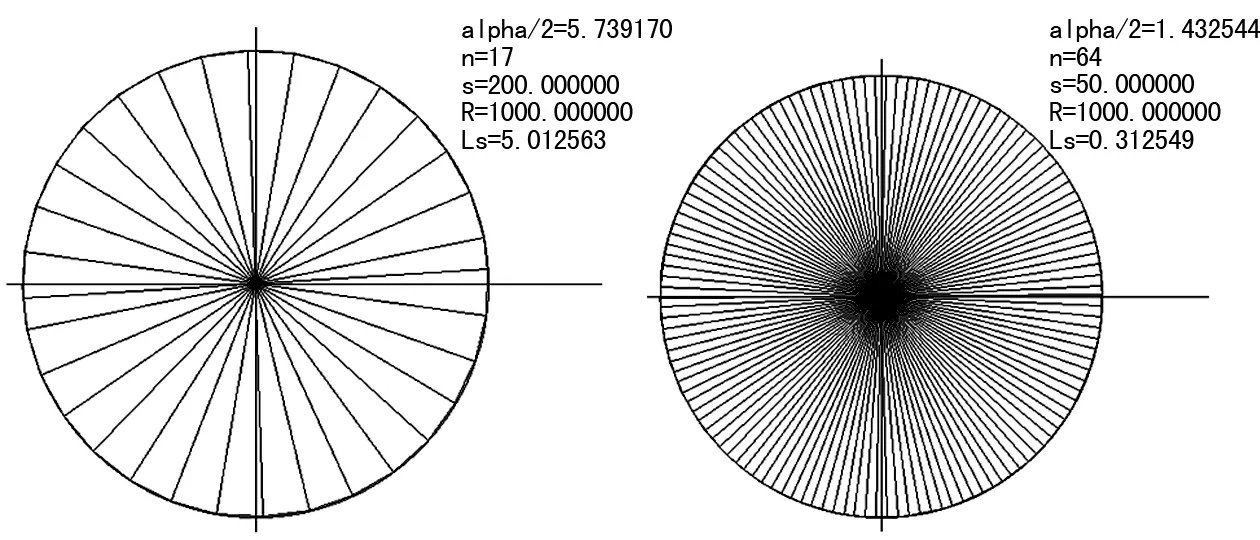
圖16 設備旋轉軌跡圖 圖17 設備旋轉軌跡圖
根據旋轉角度模擬的設備軌跡偏移如圖18所示,設備旋轉過程中不會產生較大橫向偏移,產生的橫向偏移能夠由行走機構內部間隙補償。
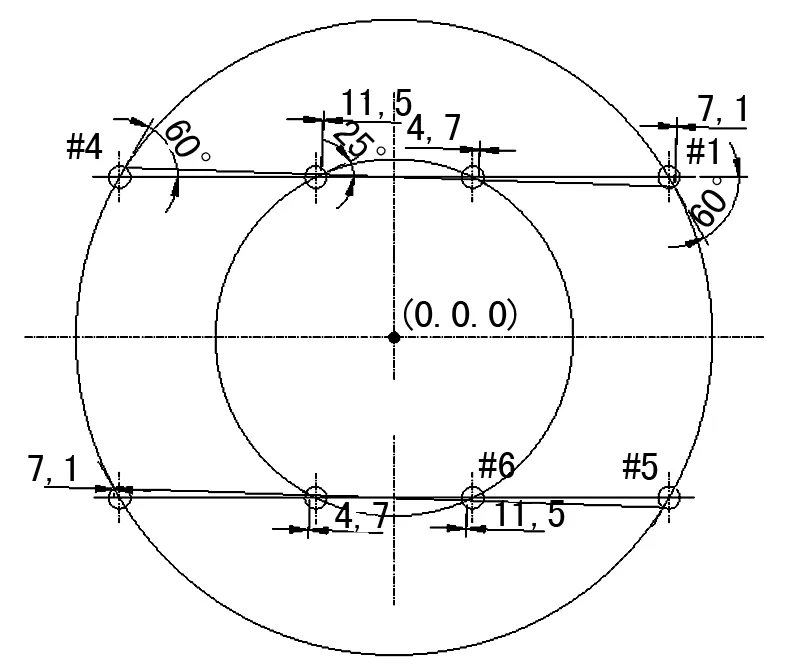
圖18 設備旋轉偏移軌跡圖
主機模塊各行走機構偏移如表2所列。
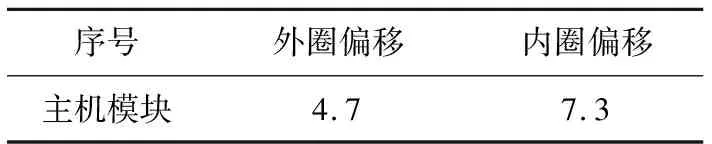
表2 行走機構旋偏移量 /mm
3 結 論
通過對鉆機主機移運軌跡分析得出以下結論:
(1)人工島360°鉆機移運系統具有快速移運旋轉功能,滿足叢式井鉆井要求。
(2)移運系統行走機構按照圓弧切線旋轉時中心會產生一定的偏差。
(3)移運系統按圓弧切線旋轉時,行走機構與支撐架產生偏移,偏移量與行走補償成正比。
(4)行走機構按照圓弧內切線旋轉時,行走機構和支撐架基本無偏移。
(5)人工島360°鉆機移運系統旋轉應按圓弧內切線旋轉。
(6)該研究成果對大型裝備移運和轉場具有一定的參考價值。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
