一種雙臂魔方還原機器人機構設計*
2021-03-22 02:19:36阮嘉宏翁涌杰俞龍杰鄒趙渭儲博凱江曉亮
機械研究與應用 2021年1期
阮嘉宏,翁涌杰,俞龍杰,鄒趙渭,儲博凱,陳 龍,江曉亮
(衢州學院 機械工程學院,浙江 衢州 324000)
0 引 言
隨著科學技術的不斷發展和工業化的日趨成熟,智能和自動化正逐步取得突破性的進展,各行各業在迫切地需求綜合性強的智能機器人。智能魔方還原機器人便是其中綜合性的重要體現。結合多方面考慮,魔方還原機器人對機械步驟響應、還原速度,判斷識別成功率以及效率,機械動作準確度都有極高的要求。目前一個能穩定快速還原魔方的機器人設計難度較高,需要有較多的技術綜合,因此研究解魔方機器人的設計具有一定的科研價值及創新意義。
筆者針對這些上述要求提出了一種雙臂二指型魔方[1]的結構設計方案,設計目標是快速穩定還原任意打亂的魔方。該機器人結構設計便于操控與移植算法,整體穩定型較高,普適性較強,成本低,具有高度擴展性。
1 總體方案設計
該雙臂解魔方機器人設計包括機架和框架,兩個臂,圖像采集系統和控制系統。每只手臂由步進電機,支架,聯軸器,氣動滑環,氣動手爪組成[2]。步進電機通過支架與底座固定,電機與滑環通過聯軸器和光桿來連接,并用自己設計的3D打印零件將滑環的定子固定在底座上,最后氣爪與滑環的轉子相連接[3]。該機構使用一對1080P攝像機捕獲圖像,從而在確保識別穩定性的同時加快了識別速度。圖1顯示了魔方機器人的整體結構。
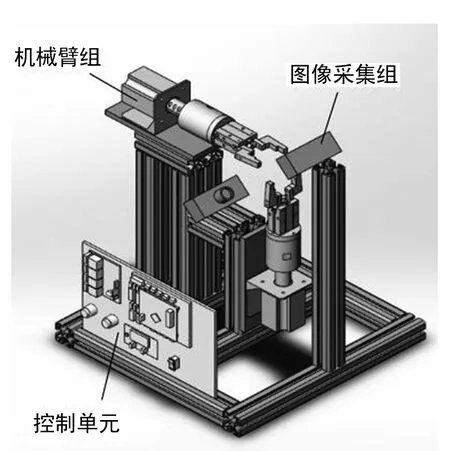
圖1 魔方機器人總體結構圖
上位機(計算機),下位機(STM32F407ZG微控制器),兩個步進電機及其驅動器,機器支架(40*40鋁材)、攝像頭、氣動滑環、氣爪,電磁閥,氣瓶,控制部分包括單片機和驅動控制機構[4],兩個圖像采集裝置安裝在還原手臂的對角線上,第一機械臂和第二機械臂分別安裝在機架上。在上方,第一機械臂和第二機械臂的軸線彼此垂直交叉以形成魔方夾具。
左右機器臂分別通過驅動控制機構與單片機連接,攝像裝置與單片機連接[5]。雙臂解魔方機器人不需要改變魔方的本體,利用經優化過的圖像識別結構,提高魔方識別效率的同時縮小了機器人的總體體積,節約成本,方便制造。
2 魔方機器人結構設計
2.1 機械臂結構設計
該魔方機器人結構還原魔方需要靠兩只機械臂中57步進電機帶動聯軸器,通過聯軸器與氣動滑環、氣缸手爪相連。通過自制的氣動滑環支架支承,由此減少了步進電機工作時徑向滑移帶來的偏差以及減小了摩擦力,節約了功耗[6]。氣閥固定在底座上與氣缸手爪相連,較細的通氣管保證了氣流流體的連續性,能精準快速的完成動作。兩只機械臂呈現水平方向與豎直方向90°的位置擺放,能夠最大程度上的固定魔方初始還原位置,減少還原魔方時機械臂的運動帶來的機體振動,在提高魔方色塊識別率的同時穩定還原時機體動作,提高還原成功率。
通過對魔方尺寸與機器人本身的配合關系的研究,將魔方手指設計為二指結構,在保證夾持力度的同時減小體積與轉動慣量,方便夾持與配合電機旋轉,定為氣動手爪二指間距導程要在86~135 mm之間,由此利用3D打印設計了階梯指與氣動手爪相連,在第二階梯面上附著2 mm厚度的橡膠片來增大摩擦力與對夾持時手指的閉合進行緩沖,階梯指中階梯尺寸為長14 mm,寬10 mm,另有5°的傾角,在此狀態下機械臂手指對于魔方的夾持力度較大且穩定又不影響識別效果。具體結構如圖2所示。
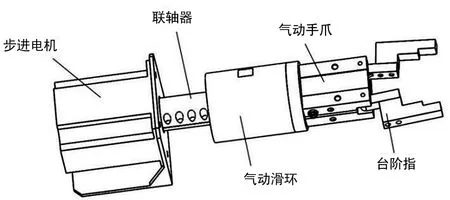
圖2 機械臂結構圖
2.2 氣動手爪結構設計的分析
在實際的還原過程中,機械臂的設計是實現還原功能最重要的事情。考慮到魔方機器人的可行性,體積和重量,該項目采用了兩臂兩指復位方法。這種手臂設計方式體積較小,結構簡易緊湊,二指的夾持力度較大,十分適合用以還原魔方。具體結構如圖3所示。

圖3 機械手爪結構圖
手指作為夾持魔方的部分需要在氣動手爪的導程與夾持力度之間做出協調。3階魔方的尺寸為57×57×57 mm3。要牢固地夾持住魔方,需要手指閉合的情況下,手指間距k略小于57 mm。因此,選擇了最小閉合角度α為7°的氣動手爪,由此通過3D打印的方式,設計出了使用PLA材質的階梯手指。階梯部分用于在放置與還原過程中對魔方進行定位與限制作用。k值的大小在我們多次實驗中確定為53 mm,這樣的k值能讓階梯指牢牢地夾住魔方的同時不至于將魔方擠壓變形或是擠壓至與另一手臂發生干涉[7]。
2.3 魔方識別結構設計
如圖1所示,該設計使用雙1080P攝像機捕獲圖像。兩個攝像頭分別固定于機械臂加持魔方的45°方向,與所要加持的魔方相距24 cm。在方案中,攝像頭每次可以拍攝一張帶有魔方相鄰兩面的圖片,通過透視變換與圖像拼接把第一次拍攝的兩張包含4個面的圖片與通過機械臂轉換魔方朝向后的第3、4張照片組合,這樣就得到了魔方6個面的圖片[8]。
通過去噪,分割和取6張圖像的平均顏色等預處理操作,輸出圖像的顏色信息,再通過Python中的Kociemba算法庫對輸出的魔方色塊信息進行求解,得到一組解字符串。再返回上位機,輸出電脈沖信號分別去控制電磁氣閥與步進電機,對手臂進行旋轉與夾持的控制,以實現魔方的還原。
2.4 框架結構設計
為保證圖像識別便利與還原動作的迅速,本項目采用了水平與豎直擺放手臂的方案[9]。這種結合方式通過手爪的臺階手指與夾持定位器之間的配合能夠保證每次的夾持都可以使魔方在同一位置,避免了魔方位置改變而去影響圖像采集與切割、還原時手爪夾持錯位等問題。夾持定位器如圖4所示。
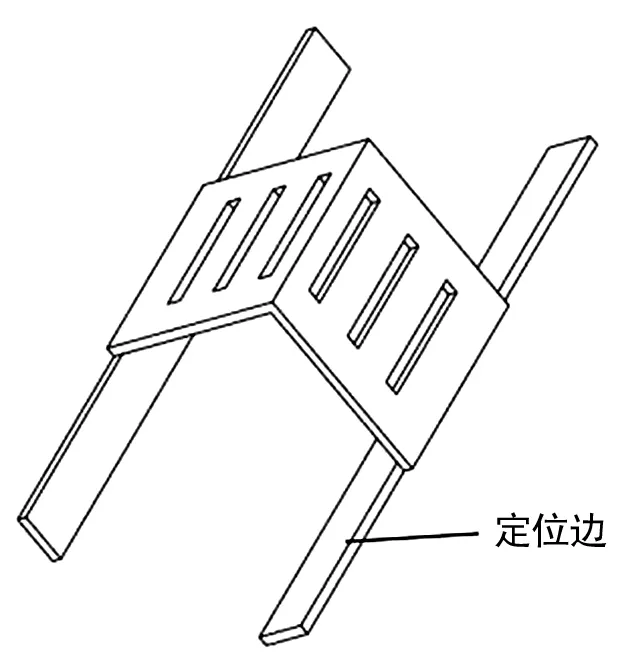
圖4 夾持定位器
定位時將魔方放入夾持定位器內,再將氣動手爪張開,把夾持定位器兩條定位邊架在氣動手爪的臺階指上,把夾持定位器延垂直于手爪方向滑移取出,最后將手爪合攏夾持,這樣就便利地完成了魔方的安裝[10]。
魔方機器人主體部分為40×40的鋁材框架包圍成的立方體,結構緊湊小巧,這樣的框架在減少機器人重量與體積的同時可以有利于魔方還原時的穩定,減少機器振動,提高還原效率與成功率。
3 結 語
此次二指魔方還原機器人的結構綜合了以往魔方機器人的各類優勢,將體積小、重量輕、結構緊湊、功能實現穩定等優點融為一體,相較于傳統魔方還原機器人,降低了大量成本,精簡了結構設計,使其能夠適應各類環境限制,能在多種場景下進行魔方還原功能。順應了機器人的發展方向,朝著綜合性強、自動化、普適性強的目標靠攏。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2021年13期)2021-07-28 07:15:50
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
中國房地產業(2016年2期)2016-03-01 01:25:23
中國房地產業(2016年24期)2016-02-16 06:10:22
