一種攻角可調的雙段翼仿生撲翼飛行器設計*
2021-03-22 02:19:36林鎮煒王麗麗肖杰康黃明威
機械研究與應用 2021年1期
林鎮煒,王麗麗,肖杰康,黃明威
(東莞理工學院 機械工程學院,廣東 東莞 523000)
0 引 言
昆蟲和鳥類等生物高超的飛行性能是自然界億萬年進化的結果,飛行效率是目前人造飛行器所無法與之比擬的。針對目前消費市場上的螺旋槳式無人飛行器普遍存在飛行效率低,續航時間短的短板且飛行噪音大,仿生撲翼式無人飛行器存在撲翼動作單一,攻角不可調節等問題研制一款飛行效率高,續航能力長,飛行姿態可調的新型撲翼式飛行器。
目前國內外在撲翼飛行器樣機研制過程中大多采用模仿昆蟲或小型鳥類的單段翼式撲翼結構,而這種結構形式在飛行器翼展尺寸增大時氣動性能會顯著惡化。因此,考慮到負載能力的要求,本團隊選擇禿鷲等大型鳥類作為研究對象研發一種可沿展向折疊的新型多段翼式仿鳥類撲翼飛行器。
目前研發的螺旋槳式飛行器(無人機)多用于偵察方面,該類無人機飛行時噪音轟鳴且外形易辨認,在警用偵察時極易引起犯罪嫌疑人警覺,在軍用時則容易被敵方識別并擊落,在續航方面,螺旋槳式無人機需要其螺旋槳高速轉動提供升力才能滯空,滯空時間取決與電池電量和機身重量。筆者研究的雙段翼仿生撲翼飛行器,仿照禿鷲的飛行方式,利用熱氣團上升帶來的升力滯空從而長時間對地面進行偵察,且設計的外形偽裝為鳥類,不易被敵方識別。外觀可漆成各種大型鳥類,加上其仿生性的撲動飛行方式,該撲翼飛行器亦可應用在大型演藝演出上。
1 動力電路及控制系統設計
雙段翼仿生撲翼飛行器主體設計由動力電路及控制系統,兩段撲翼運動機構,圓柱直齒輪傳動機構,尾舵控制機構等組成,骨架上覆EPP泡沫,并可涂裝鳥類外形。
1.1 選型確定
參考其他文獻并結合以往設計經驗,依據實際需求調整后,初步決定以下選型:
動力電路部分中,電源選用eoWER-3S25C航模電池,額定電壓11.1 V,質量165 g,原動機選用A2212/10T-1400無刷電機,kV值為1400,(即供電電壓為10 V時,轉速為14 000 r/min),質量51 g。電子調速器(后簡稱電調)選擇與無刷電機適配的Skywaler15A,質量為17 g。信號發射器與信號接收器為同一套產品,品牌型號Radiomaster TX16S,質量為392 g,可實現對撲翼機器人的無線遙控。
控制電路部分中,集成電路芯片選用的是品牌型號為STC89C52的單片機芯片(后簡稱51單片機),質量約15 g,舵機選用MG90S小型舵機,質量為13 g。各傳感器類選型的基本要求是質量輕巧,具體性能不再贅述。
1.2 電路控制原理
如圖1電路控制原理圖所示,11.1V航模鋰電池電源直接給電子調速器供電同時連接上變壓模塊以便輸出5V電路,另一端接入低壓保護器。電子調速器接受11.1V電源后將其轉化為三相正弦波電流以驅動無刷電機,無刷電機轉速此時取決于其輸出的三相正弦波電流的頻率大小。電子調速器由5 V電路供電以維持正常工作,受由信號接收器引出的信號線發送持續的電信號以調節輸出電流的頻率與功率,控制無刷電機的實時轉速。

圖1 電路控制原理圖
無線信號發射器為操作端,推動油門桿方向桿等操作桿,其上無線電波信號發送至信號接收器,信號接收器把接受到的無線電波信號轉化為電信號由一條信號線引至電調控制無刷電機轉速,另外兩條信號線引致51單片機,單片機實時處理信號而發送電信號控制舵機組1和舵機組2,控制撲翼仿生鳥的飛行姿態和轉向。姿態傳感器實時讀取撲翼仿生鳥的飛行角度速度等將數據傳回單片機,單片機根據撲翼仿生鳥的當前飛行姿態控制舵機組3而調整飛行攻角。溫濕度傳感器和攝像頭將控制收集到的溫濕度數據和所拍攝到的圖片返回單片機從而采集空中數據進行空中偵察。攝像頭以數據線與單片機連接,數據線中已包含供電線。
2 雙段翼撲動仿生機構設計部分
2.1 雙段翼式鳥類撲翼運動分析
此次研究的仿生鳥主要以禿鷲為仿生對象,經過研究,禿鷲的飛行是相對節省能量。白天太陽照耀在大地上,而地面上由于地形、植被的不同,受熱并不均勻,有些地方更容易受熱,那些地方空氣的溫度上升也比較快,熱空氣比冷空氣輕,就會形成一股空氣柱慢慢地上升。在這股空氣柱的底部會受到冷空氣向上兜的力,結果,熱空氣就成了一團向上翻滾的大氣泡。我們可以把它想象成蘑菇云,但肉眼卻看不到。禿鷲可以憑著它們特有的感覺捕捉到這種自然的力量。它們鉆進上升的氣泡中,在氣泡的頂部盤旋,依靠氣泡上升的力量,它們可以爬升到500~1 000 m的高空。作為一種食腐動物,禿鷲會在空中長時間觀察地面目標以確定其是否已死亡,這種超長時間的滯空能力和超強觀察力是文中研究撲翼仿生鳥的目標。
禿鷲以及大部分大型猛禽類的翼翅可分作內翼和外翼兩部分,因此稱大型鳥類的翅膀為兩段翼,研究分析大型鳥類中,禿鷲的撲翼動作后發現,禿鷲的翅膀撲動動作大致可分為兩個階段,為下撲階段和上撲階段。
圖2所示為由知網文獻搜集的大型猛禽類的飛行撲翼動作,其中1~7的運動過程為下撲階段,此階段是大型猛禽鳥類撲動飛行產生升力和前進推動力的主要階段,該階段所需時間最長,在開始準備下撲時,鳥類的翅膀會完全舒展開來,使其翅膀的受力面積達到最大,以便在整個下撲過程中獲得最大的推力和升力;8~14過程為上撲階段,當翅膀下撲到最低點并停留一段時間后,其外翼部分會開始下垂,同時其內翼部分開始向上回轉,翅膀呈拱起的狀態,盡量減小其翅膀受力面積,以降低阻力的作用,當內翼回轉到最高點是,外翼開始向上揚起,再次使其翅膀受力面積伸展到最大,準備開始下撲,如此反復運動,從而為飛行提供動力。
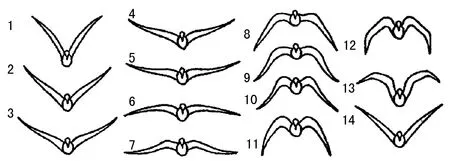
圖2 大型鳥類撲翼運動分析圖
查閱各方文獻中搜集得表1數據,供后文撲翼機構的設計參數參考。

表1 禿鷲仿生設計相關參數
2.2 撲翼機構的設計計算
研究的飛行器撲動機構選用雙曲柄搖桿機構初步估算仿生撲翼飛行器的總質量為300 g機構原理圖如圖3。
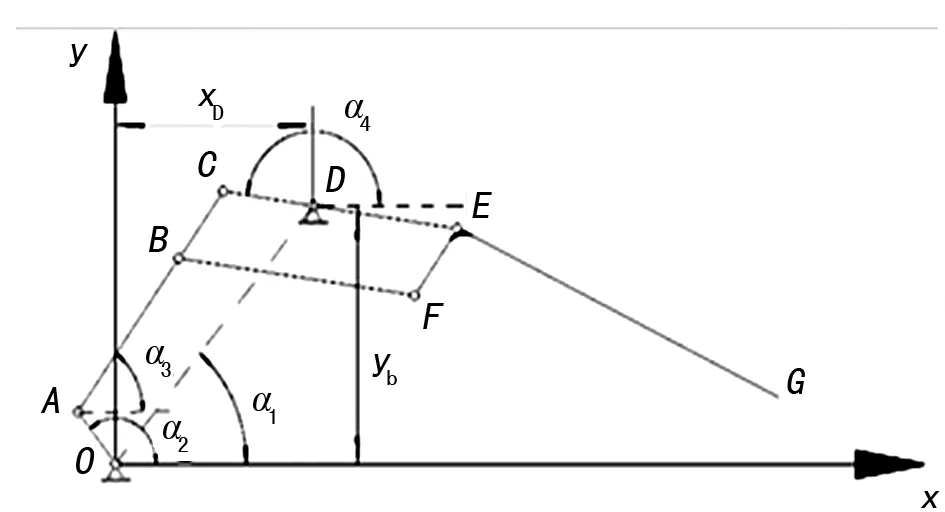
圖3 仿生撲動機構原理圖
其中O點與D點為機架,OA為曲柄,AC為連桿,CE為搖桿,它們構成了內翼部分,而桿BF和桿FEG構成了外翼部分。當曲柄OA與連桿AC拉成直線時,搖桿CE的搖擺幅度達到下極限值。由以往設計經驗,初步取LCE=LBF=0.27 m,LBC=LEF=0.015 m,D=0.1 m。
則:
LEG=L-LCE-D/2=0.68 m
(1)
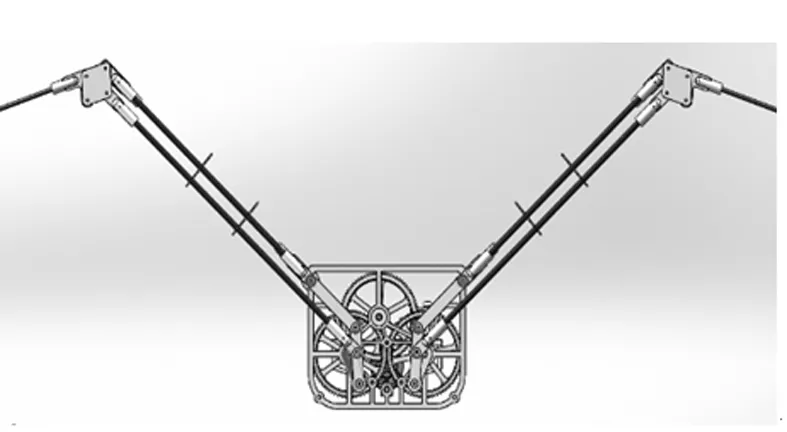
圖4 機構三維建模圖
2.3 圓柱直齒輪減速傳動機構
原動機轉速計算如下:
n=1 400×11.1=15 540 r/min
(2)
設計機構的撲動頻率為60 Hz,則:
(3)
漸開線圓柱齒輪傳動比為3~5 因此應采用三級減速機構。初步分配傳動比:
i1=4.76
(4)
i2=3.80
(5)
i3=2.38
(6)
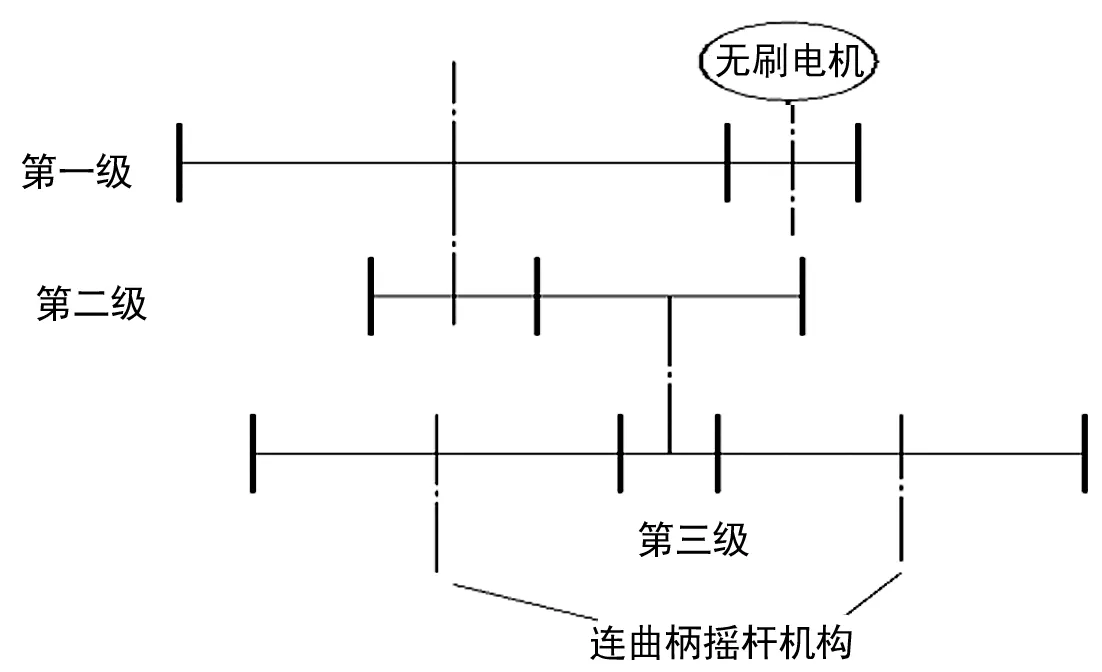
圖5 齒輪裝配布置簡圖
2.3.1 選定第一級齒輪類型、材料及齒數
齒輪設計基本公式有:
Z1×i1=Z2
(7)
d=mz
(8)
確定齒輪類型:兩齒輪均為標準直齒圓柱齒輪,8級精度。材料選擇上,考慮高速級應力循環次數最大,因此選用擁有優秀比強度的金屬材料齒輪材料選用閉式軟齒面。小齒輪材料為優質碳素鋼45,調質處理,硬度取值為250HBS;大齒輪材料為21spc尼龍材料,硬度取值為30HBS。
原動機輸出軸徑3.17 mm,為節省幾何空間以及減輕結構重量,以電機軸直接作為輸入軸而不用聯軸器連軸結構。由于原動機輸出軸無法制成齒輪軸。故小齒輪分度圓直徑至少為:
d1=3.17×4=12.68 mm
(9)
將d1圓整為13 mm,若取模數為1 mm則齒數為13,不滿足最低齒數17,因此采用非常用模數0.8 mm,取小齒輪齒數為17,則由式(7)、(8)得:
Z2=Z1×i1=17×4.76=80
(10)
d2=Z2×0.8=64 mm
(11)
2.3.2 選定第二級齒輪類型、材料及齒數
兩齒輪均為標準直齒圓柱齒輪,8級精度。為減輕飛行器的重量,小齒輪材料為21spc尼龍材料,硬度取值為30HBS。大齒輪材料為21spc尼龍材料,硬度取值為30HBS。經過一級減速后,傳遞轉速減慢而傳遞扭矩增大,故應采取更大的模數和,而分度圓則可以適當減少,即齒數減少,為保證傳動平穩,齒數17已為極限少齒數,故各小齒輪齒數Z1、Z3、Z5都只能選擇為17,即Z3=17。
初步選定模數為1 mm,則由式(7)、(8)得:
d3=1×17=17 mm
(12)
Z4=Z3×i2=64
(13)
d4=1×64 mm
(14)
2.3.3 選定第三級齒輪類型、材料及齒數
該齒輪副中,為低速級齒輪傳動,有兩個對稱布置的大齒輪,大齒輪上連接曲柄搖桿機構,為保證兩翅撲動對稱,齒輪選6級精度,材料均選用POM4520尼龍 齒面硬度30HBS。Z5=17,由于幾何結構限制仍取模數1 mm,該級傳遞扭矩較大,故應適當加大齒寬。由式(7)、(8)得:
d5=1×17=17 mm
(15)
Z6=Z5×i3=64
(16)
2.3.4 傳動比相對誤差校核
由2.3.1~2.3.3可制得表2,表3所列。

表2 高速級齒輪設計結論
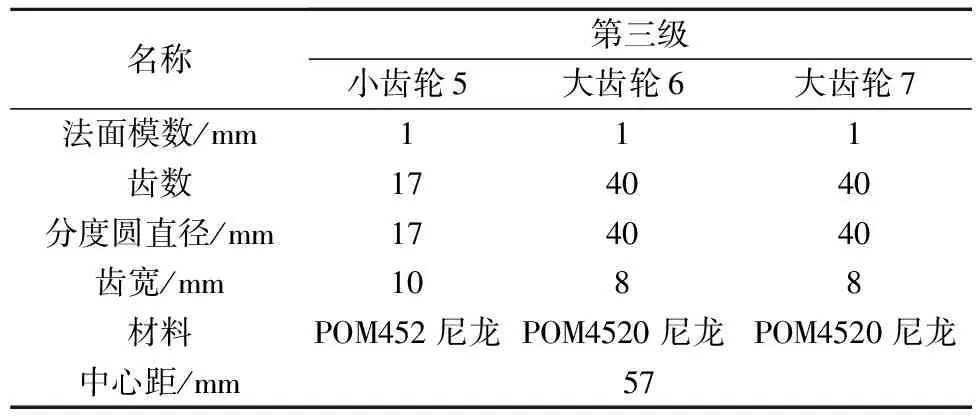
表3 低速級齒輪設計結論
計算總傳動比i′以及整機傳動比相對誤差:
i′=(Z2/Z1)×(Z4/Z3)×(Z6/Z5)=41.68
(17)
Δ=(i′-i)/I=3.4%
(18)
減速比誤差小于5%,故符合工程要求。
3 撲翼機器人骨架及其控制
3.1 整機骨架部分
碳纖維材料由于其輕便結實,常用于航模等的制作材料。因此整機選用比強度很高的碳纖維管/棒以及碳纖維板制成,整體機身骨架建模示意圖如圖6、7,兩圖中,整體呈翼狀的為機器的曲柄搖桿撲翼機構;成“Y”狀的為尾舵機構;中間為齒輪減速機構,齒輪箱板支撐由碳纖維板加尼龍螺柱組成并鏤空處理,由直徑3 mm的碳纖維棒作主支撐貫穿整個機器。撲翼機構上流線片狀為翼片支撐構件,支撐其上覆蓋的EPP泡沫。
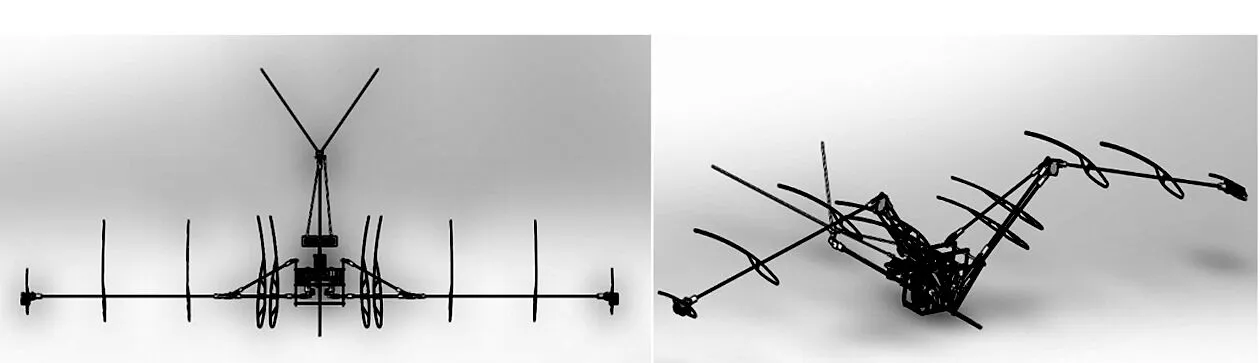
圖6 機身骨架俯視圖 圖7 機身骨架軸測視圖
3.2 尾舵控制部分
如圖8,尾部設計通過兩個舵機連接連桿機構,連桿兩端帶魚眼軸承提供額外自由度,通過舵機組中兩個舵機配合運動,可實現尾部的上下左右運動。
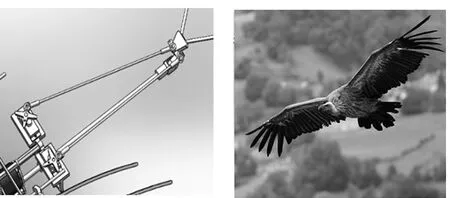
圖8 設計的尾部骨架 圖9 禿鷲的尾部圖
如圖9,仿照禿鷲的尾部,覆蓋EPP泡沫制成扇形尾舵圖10。

圖10 尾部實物圖 圖11 撲翼機構尾端
3.3 攻角控制部分
曲柄搖桿撲翼機構末端裝有舵機,如圖11,可控制流線片狀翼片小幅度轉向,在飛行過程中,51單片機接受從各傳感器返回的數據而做出實時判斷,發出控制指令實時控制該舵機組,從而實時調整飛行攻角獲得更佳的升力。
4 結 語
研究了一種仿生動物飛行新概念的飛行器---特種機器人撲翼飛行器。文中基于項目科研工作開展并結合機械仿生設計學完成了一種攻角可調的仿生飛行撲翼鳥的電路控制等設計。利用文中原理可制得撲翼飛行器原動機。文中制作計算主要依據經驗公式,所得僅為近似值,受限于實驗條件沒有進行流體力學分析。在設計計算精度、外形流體分析,以及重心控制方面有待進一步改善。此次是對仿生撲翼機器人的基礎研究,需進一步加深,希望對仿生撲翼飛行機器人的相關研究及此類機器人的成熟化與產品化過程能起到一定的參考作用。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
