基于一階加純滯后模型的高精度氣體流量控制算法設計
2021-03-25 08:22:02汪瀟雨石曉康
自動化與儀表 2021年3期
岳 彬,汪瀟雨,石曉康
(1.北京航空工程技術研究中心,北京100076;2.93121 部隊,北京100720)
油氣濃度檢測報警系統檢定校準裝置(以下簡稱“檢定校準裝置”)屬于本級計量器具,該裝置與高濃度標準氣體、稀釋氣體組成油氣濃度檢測報警系統現場檢定裝置,是一種智能化程度高、簡單實用的便攜式油氣濃度檢測報警系統現場檢定裝置[1]。油氣濃度檢測報警系統現場檢定裝置的工作原理就是通過檢定校準裝置,將高濃度標準氣體和稀釋氣體充分混合,配制出符合檢定校準工作要求的一定精度、濃度、流量的標準氣體,進而檢定評價被檢油氣濃度檢測報警器的各項計量性能。
在檢定校準裝置中,氣體質量流量控制器是決定油氣濃度檢測報警系統現場檢定裝置性能的關鍵。通過檢定校準裝置中質量流量控制器檢測的各種參數,來控制高濃度的標準氣體和純凈氣體,盡可能地減少系統滯后性和系統的遲滯效應[2],并提高質量流量控制器的響應速度[3]。目前眾多質量流量控制器對滯后性的指標要求不高時,可以選用常用的質量流量控制器[4]。但是有高實時性和低滯后性需求的氣體質量流量傳感器,則會導致控制器的遲滯性,檢定校準裝置的性能和精度受到影響[5]。
本文針對這一問題,設計了一個采用一階加純滯后模型的質量流量控制器。它與常見的質量流量控制器的區別是,對質量流量控制器滯后性所引起的輸入遲滯效應具有良好的抗性[6]。尤其是針對非線性的連續輸出變化具有良好的效果[7]。我們基于一階加純滯后模型設計的質量流量控制器的算法簡單,響應迅速,并且對外界的干擾擾動具有良好的抗性[8]。通過引入滯后模型很好地提高了系統的響應速度和配置氣體的輸出精度[9]。
1 流量控制工作原理
標準氣體的濃度是由質量流量控制器所控制,通過精確調節輸入氣體流量,準確測量高濃度標準氣體和稀釋氣體兩個氣體流量之比就得到稀釋倍數,混合氣體的濃度可從稀釋倍數計算出來,調節氣體流量之比可以得到所需濃度的標準氣體[10]。
需要先對高濃度的標準氣體的流量質量控制器和純凈氣體的流量質量控制器進行標定,從而獲得計算標準氣體濃度的初始條件。當配置標準氣體時,根據所要配置的氣體濃度和流量值,在裝置上設定樣品氣體和稀釋氣體的流量即可[11]。標準氣體的濃度配置如式(1)所示:

式中:Cs是目標的標準氣體濃度;Fs是高濃度的標準氣體的實際流量,(mL/min);Fa是純凈氣體的實際流量,(mL/min);C0是被稀釋樣品氣體的已知濃度。綜上所述,只需要控制兩種氣體的流速就可以得到不同濃度的標準氣體。
質量流量控制器的響應曲線,根本上可以認為是非線性的不連續控制函數。但是,本控制系統所控制的氣體流量不固定,而是根據配置氣體中的濃度來動態平衡調整。在本系統的動態配氣過程中,需要設計一種動態平衡并消除滯后影響的控制算法,可以使得動態配置的氣體濃度達到精確的濃度和非滯后性,我們稱之為非滯后性控制[12],其表達式為

式中:η 是控制使配置氣體達到非滯后性的高精度控制配氣速度參數;δ 是防止配氣出現滯后性的函數;動態平衡函數S(t)是非滯后性控制時配置氣體的濃度隨目標濃度變化的函數。
控制原理結構如圖1所示,r(t)是濃度參考值,y-(t)是系統的滯后性表示,y(t)是配氣系統的控制參數和em(t)滯后性所導致的誤差。
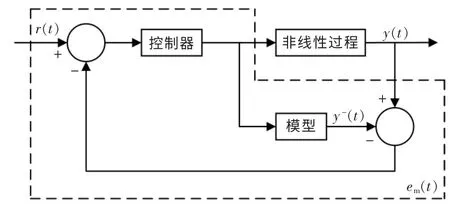
圖1 控制原理結構圖Fig.1 Control principle structure diagram
由圖1 可以看出,氣體控制器分為兩個模塊:氣體濃度精度控制器和控制滯后補償控制器。氣體濃度精度控制器的功能是控制氣體的閉環控制可以保證氣體高精度的控制性,控制滯后補償控制器作用是為了使得氣體的控制擺脫滯后性的干擾,使其可以快速并穩定地達到指定的精度。在控制滯后補償控制器中,主要是通過基于一階加純滯后模型實現滯后補償的控制。之前的氣體濃度控制器往往由于控制器的調節具有較大的滯后性而造成時間延遲,導致控制具有遲滯性,為了提高動態配氣的準確性和高實時性,我們在自己的系統中引入一階加純滯后模型公式為

式中:K 為與標準濃度差距的增減值;t0為控制器的滯后時間;α 為一階滯后參數。一階滯后模型由以下兩個函數組成:

式中:G+是一階滯后模型的滯后模型;G-是抵消模型中滯后性的對消函數。將這兩個模型組合引入圖1 的控制模型,形成改進的原理圖,如圖2所示。

圖2 引入一階加純滯后的控制原理圖Fig.2 Control principle structure diagram based on a first-order mass flow controller with a pure hysteresis model
油氣質量流量函數S(t)為

根據上述的控制模型,將油氣質量流量函數中的公式變形為

則油氣質量流量函數簡化為

為了非滯后性控制的條件,dS(t)/dt=0,所以從式(7)和式(8)可以推論出

把滯后函數(5)代回式(2)并進行微分運算處理,推算出如下公式:

把以上兩個公式相加可以得到一階加純滯后的模型控制函數為

把一階加純滯后方程代回原油氣流量濃度控制方程,計算出油氣流量濃度的非滯后性方程(u(t)為控制輸入)為

2 實驗分析
通過模擬仿真來驗證所設計的一階加純滯后模型的氣體流量控制器的非滯后性能。實驗中需要驗證設計的原理和設計的功能性和準確性。使用Simulink 仿真對一階加純滯后模型的氣體流量控制器進行仿真來驗證其功能性以及性能。Simulink 仿真模擬原理圖如圖3所示。
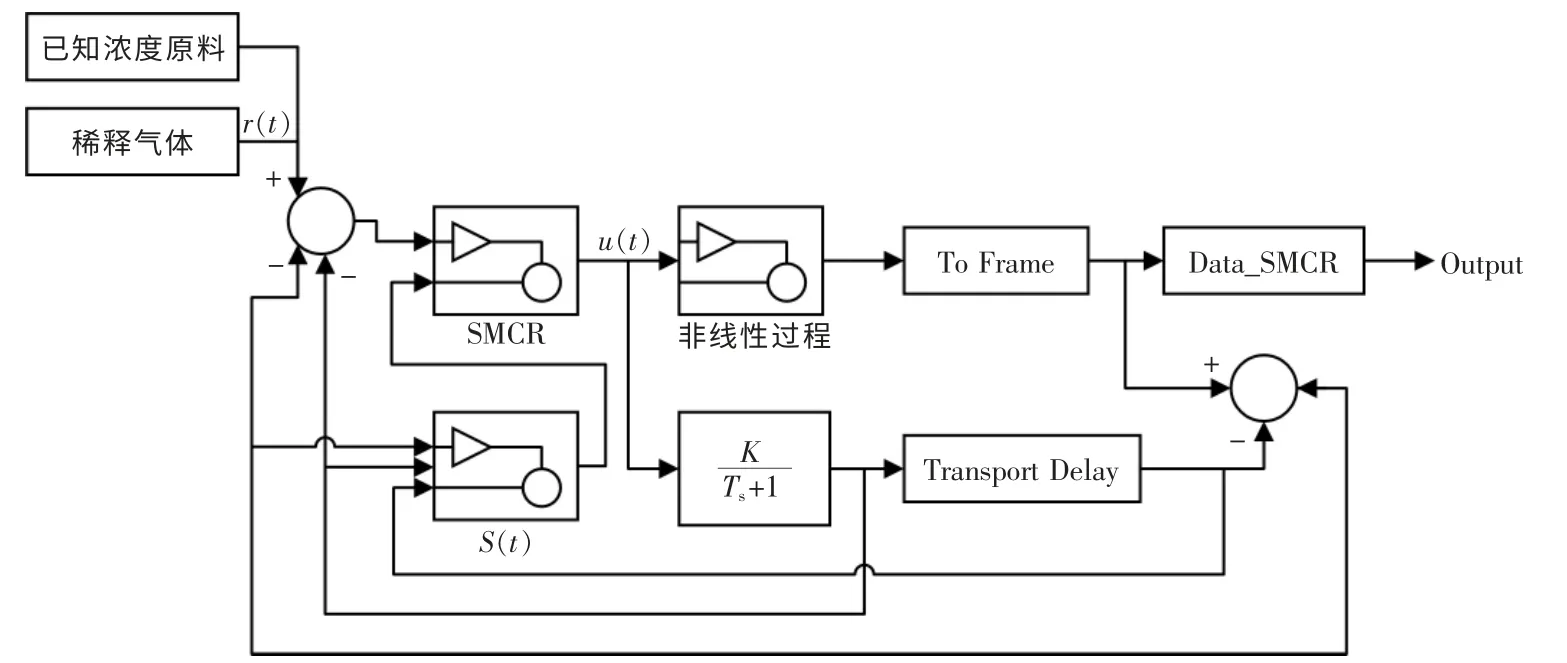
圖3 質量流量控制器一階加純滯后仿真模型Fig.3 Mass flow controller based on a first-order mass flow controller with a pure hysteresis model
一階加純滯后模型的氣體質量流量控制器對已知濃度的原料氣體和稀釋氣體的流量進行動態控制,之后將兩種氣體在混合室中進行均勻并充分的混合后,在從混合室中輸出所配置的氣體。一階加純滯后模型的氣體流量控制器。氣體質量流量控制器控制范圍為0~1000 mL/min,流量值在0 mL/min、200 mL/min、400 mL/min、600 mL/min、800 mL/min 和1000 mL/min 勻速增減。在Simulink 仿真的結果如圖4所示。從仿真結果可以分析出當氣體高濃度的標準氣體和純凈氣體的流量發生變化時,一般常見的質量流量控制器具有很高的遲滯性,導致精度下降,而本文所設計的基于一階加純滯后模型的質量流量控制器就可以準確并實時地輸出所需濃度的標準氣體。根據仿真結果,可以計算出基于一階加純滯后模型的質量流量控制器的控制精度誤差在0.89%以內,如表1所示。仿真結果可以證明出,本文所提出的方法響應迅速,并且對外界的干擾擾動具有良好的抗性。通過引入滯后模型很好地提高了系統的響應速度和配置氣體的輸出精度。

圖4 控制器仿真結果圖Fig.4 Controller simulation result

表1 流量誤差結果比較Tab.1 Comparison of flow error
3 結語
本文設計了一種基于一階加純滯后模型的質量流量控制器的油氣濃度檢測報警系統檢定校準裝置,可以精確地控制高濃度標準氣體和稀釋氣體流量,從而精確地控制輸出標準氣體的配制濃度。Simulink 仿真試驗的結果,可以證明所提出的方法響應迅速,并且對外界的干擾擾動具有良好的抗性。通過引入滯后模型很好地提高了系統的響應速度和配置氣體的輸出精度。檢定校準裝置樣機送至國家認可的法定計量檢定機構進行了校準測試,測試結果表明,兩個質量流量控制器的測量結果擴展不確定度均為0.56%(k=2),配氣精度高。檢定校準裝置可以用于油氣濃度報警檢測報警系統的標定、測試、校準和氣體傳感器的性能評價等領域,具有很好的實用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
光學精密工程(2016年6期)2016-11-07 09:07:19
