Starship新型舵面形式氣動特性數值模擬
2021-03-26 09:51:10張宇佳左光徐藝哲杜若凡趙飛屈峰
航空學報 2021年2期
張宇佳,左光,*,徐藝哲,杜若凡,趙飛,屈峰
1.中國空間技術研究院 載人航天總體部,北京 100094 2.西北工業大學 航空學院,西安 710072
自1961年加加林首次進入太空以來[1],人類的載人航天歷史已經持續了50多年。經過探索,共發展了兩類可以執行天地往返任務的載人航天器:美國的航天飛機[2]和以俄羅斯“聯盟”號、中國“神舟”號為代表的載人飛船[3-4]。Mowry等[5]指出,在發展形成這兩類載人航天器之后,載人航天運輸工具天地往返方式便鮮有顛覆性的變化。載人飛船不可重復使用,而航天飛機只有少部分可重復使用,且維護成本高昂,因此天地往返運輸成本一直居高不下[6],從而大大限制了天地往返運輸的頻率,阻礙了人類向更遠的天空邊界探索的步伐[7-8]。
近年來,民間商用航天力量的興起為航天領域注入了新的活力[9-11],而其中的佼佼者就是SpaceX公司[12]。SpaceX公司通過采用柵格翼和矢量推力控制技術,實現了第一級火箭和助推器的回收降落與重復發射[13-17],從而大大降低了發射成本,將近地軌道的發射成本從航天飛機的$54 500/kg降低至$2 720/kg[18]。在回收火箭取得成功的基礎上,SpaceX公司開始著手研制新型天地往返運輸系統,并將其命名為Starship[12]。Starship與一級火箭助推器采用串聯布置,設計總高度達130 m,起飛重量5 000 t,起飛推力達9 000 t, 一旦研發成功,其運載能力將遠遠超過現役各型火箭,代表天地往返運輸系統的最前沿。同時,通過對一級火箭和Starship的重復使用,其載人天地往返運輸成本可以大大降低,從而使載人航天走向常態化。
不同于傳統載人飛船半彈道式再入大氣層后通過降落傘回收,也不同于航天飛機在機場水平降落,Starship采用的降落方式更像其“獵鷹”火箭的回收降落方式[19],即通過舵面和矢量推力共同控制實現垂直降落。針對這一特殊的起降模式,Starship采用了不同于傳統升力體飛行器的新型舵面控制方式。傳統的升力體飛行器采用副翼、垂直尾翼和水平尾翼來實現姿態和航跡控制[20],而Starship則采用了前后兩組可沿軸線方向偏轉的翼面來實現對機體的控制。在再入返回階段,Starship可以通過舵面的非對稱偏轉實現滾轉姿態的調整,并通過側向力的變化實現“傾側”飛行,該種飛行模式可以使左右船體及舵面輪流迎風飛行,從而防止船體或舵面某一部分長時間在嚴酷的氣動熱載荷下飛行,降低防隔熱需求。同時,舵面可以向船體方向收起,從而降低翼面的氣動熱載荷[21];在再入返回末段,其可以通過舵面控制實現船頭仰起,并進入著陸準備階段,之后通過舵面與矢量推力的組合控制實現垂直降落。
本文將主要聚焦Starship在再入返回末段和進入著陸準備后舵面的控制特性,由于Starship采用了新型的舵面控制方式,因此相對于傳統升力體飛行器,其舵面控制率將會存在很大差別。目前對于該種舵面控制形式的研究非常有限,而舵面控制率將會直接影響其降落的安全性,尤其是在最后著陸階段的安全性。因此,本文針對Starship的著陸階段,采用數值方法對Starship不同舵偏下的氣動特性進行研究,得到了舵面偏轉對船體升阻力和三軸力矩的影響。
1 物理模型與數值方法
1.1 物理模型
Starship飛行器是針對天地往返和行星際旅行而設計的一種可重復使用運載器。SpaceX公司根據自身在可重復使用一級火箭上的技術積累和匹配性提出了該方案,如圖1所示[22]。起飛時,其作為第二級運載器與“獵鷹”超級重型火箭串聯垂直發射,降落時其采用與一級火箭相同的垂直降落方式。通過該種方案,Starship飛行器與一級火箭實現了最大程度上的技術通用性,從而大大降低了研制風險和運行成本。

圖1 Starship與“獵鷹”超級重型火箭 [22]Fig.1 Starship and Falcon superheavy rocket [22]
目前,針對天地往返運輸的一級重復使用運載器主要有3種方案:水平起降的一級載機方案,美國空軍提出的垂直起飛水平降落的RBS方案[21](圖2),以及SpaceX公司的垂直起降可重復使用火箭方案。水平起降的一級載機方案技術難度較高,目前仍在概念設計階段。RBS方案采用并聯形式,連接方式類似于航天飛機,該方案飛行阻力大,且并聯方式分離時發生碰撞的可能性較高,危險系數更大。不同于前兩個方案,Starship采用一二級串聯形式,該種布置方式氣動阻力小,且一二級分離危險系數低。同時,可重復使用火箭方案是目前唯一實現商業化運行的方案。通過多次成功的發射和回收,SpaceX公司在該領域已經積累了大量的經驗。因此,從短期可行性和降低研發成本和系統風險等方面考量,一級可重復使用火箭都具有巨大的優勢。鑒于以上原因,SpaceX公司最終選擇該種一級二級布置方案。
由于Starship與一級火箭串聯,因此其氣動外形主體基本上屬于軸對稱形式,直徑與“獵鷹”超級重型火箭相同,從而保證了氣動外形的光滑連接,為減小氣動阻力,頭部為圓錐形。為實現姿態和軌跡的控制,其采用了前后兩對全動舵面,該舵面可沿飛行器軸線方向轉動,在飛行器再入時,可向船身兩側收起,從而大大降低舵面表面和前緣的氣動熱載荷。圖3展示了本文對Starship精細化的氣動熱Qw仿真結果(仿真工況為80 km,Ma=15,此工況點為軌道再入升力體式飛行器再入時計算熱流的一個典型工況),前后翼下表面前緣的氣動熱載荷均非常嚴酷。在此基礎上,本文通過流線追蹤法和經過形狀因子以及壓縮因子修正的參考焓方法對前后翼面偏轉與展開時的表面熱流進行了計算[23],如圖4所示,翼面偏轉后,前后翼的下表面熱流均大幅度降低。

圖2 可重復使用助推器與Ariane 5火箭[21]Fig.2 Two attached reusable fly-back boosters from Ariane 5 core stage[21]

圖3 Starship在80 km、Ma=15時的氣動熱仿真Fig.3 Aerodynamic thermal simulation of Starship at 80 km and Ma=15

圖4 Starship在80 km、Ma=15翼面收起與展開時的表面熱流對比Fig.4 Comparison of surface heat flux between deflected wing and deployed wing of Starship at 80 km and Ma=15
目前,傳統升力體式可重復使用的天地往返運輸系統基本思路仍屬于繼承航天飛機的思路,氣動布局和飛行控制方式仍是結合飛機的控制方式,而Starship新的氣動布局和氣動操縱方式為未來天地往返飛行器提供了新的思路。
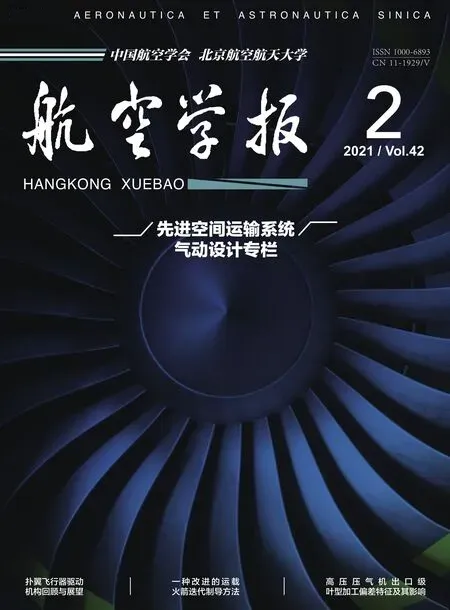
本文根據SpaceX官方網站公布的尺寸參數[22],對Starship進行了三維建模,如圖5所示,整個船體長50 m,直徑9 m,后翼展長18 m,前翼展長15 m。整船重1.0×105kg,船體采用不銹鋼制造,根據船體外形以及內部燃料儲箱和發動機的布置情況,估算得到整船重心距機頭40 m,通過重心的俯仰軸慣量矩為3.7×107kg·m2。
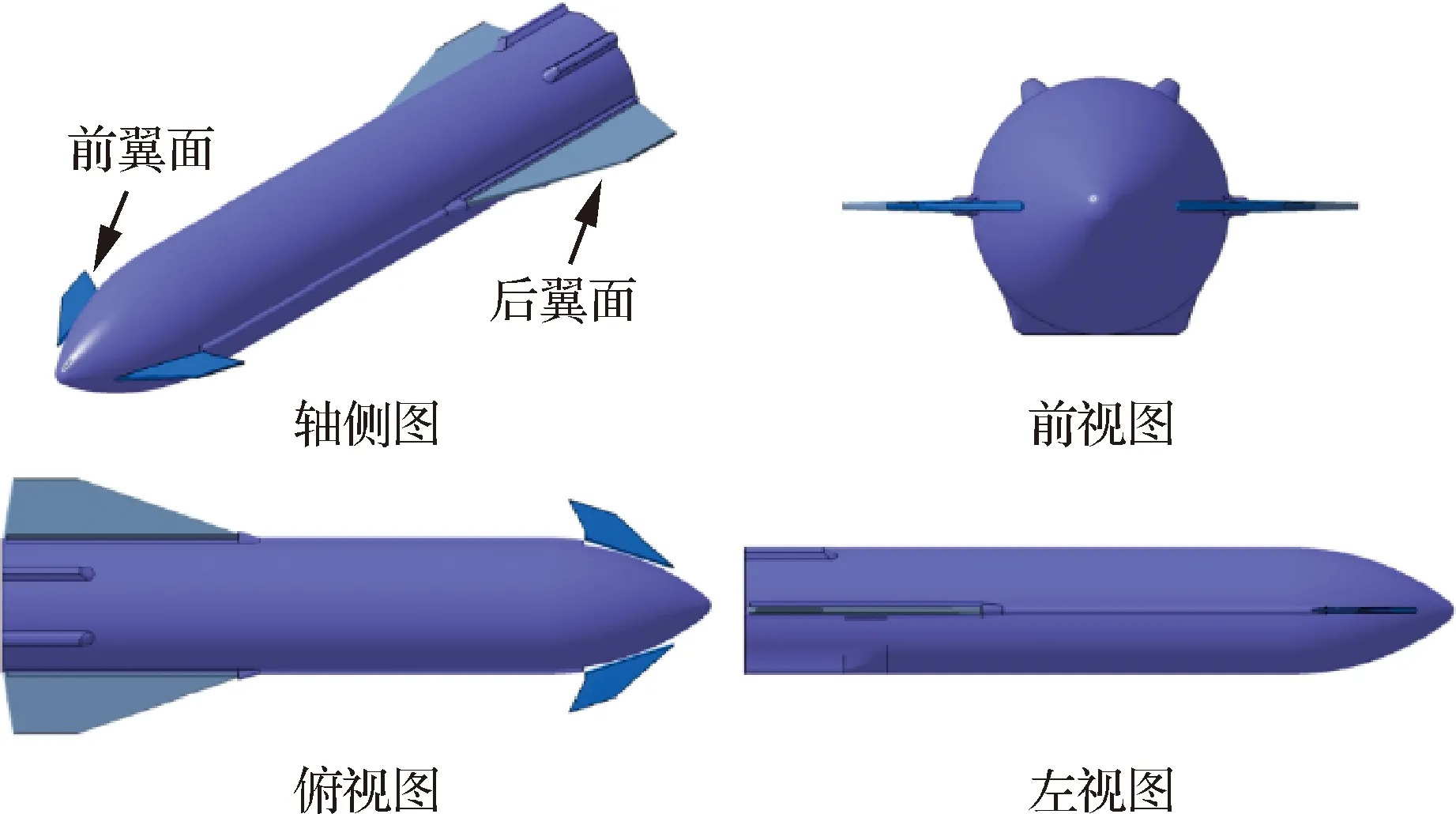
圖5 Starship三維模型Fig.5 Starship 3D model
Starship采用的是垂直起飛入軌,水平再入并垂直降落的飛行模式,因此在低速階段,其主要進行的是大攻角飛行并最終實現垂直降落。針對這一飛行模式,本文分別選取了60°攻角和120°攻角(進入著陸準備后,船頭仰起,攻角將大于90°)下不同舵偏的工況進行研究。值得注意的是,在大攻角下,Starship這樣的類旋成體飛行器,其流場必然存在大分離現象,具有非常強的非定常特性,因此其舵面控制率也必然存在很強的非線性,這對于研究此舵面形式的舵面控制率較為不利。鑒于此,本文增加了5°攻角下不同舵偏工況的研究,通過對小攻角下不同舵偏工況的數值模擬,能夠對該種舵面布置形式的氣動特性有一個更加系統性的認知。計算工況如表1所示。前后翼舵偏均為0°~60°,而在60°攻角時,考慮到大分離情況下左右兩側翼面可能存在非對稱性,故對單側偏轉和雙側同時偏轉的工況均進行了模擬。在此基礎上,本文通過采用整體動網格方法,對Starship的非定常俯仰運動進行了數值模擬。該方法不需要網格重構,通過運動邊界實現動網格計算。因此,相比于傳統的網格重構方法,該方法可以將計算效率提高一個量級,實現了對Starship舵面在大攻角降落時的非定常流場中俯仰通道上舵效的快速有效評估。

表1 計算工況Table 1 Computation cases
1.2 數值方法
通過采用有限體積法來求解三維不可壓Navier-Stokes方程。控制方程包括連續性方程和動量方程:

(1)
(2)

數值模擬采用非結構網格,并在船體表面生成棱柱體邊界層網格,網格總量1 400萬,船身表面網格及邊界層網格如圖6所示。船體表面采用壁面邊界條件,遠場采用Opening邊界條件,氣流可以在該邊界上流入和流出。計算采用全湍流模擬,湍流模型選取k-ωSST兩方程模型。

圖6 Starship表面網格及邊界層網格Fig.6 Surface and boundary layer mesh of Starship
2 計算驗證
選取NASA在第一屆AIAA高升力大會發布的TrapWing模型的實驗數據[24]以及Wang等[25]對該模型的數值模擬結果進行對比以驗證本文數值方法的準確性,實驗模型如圖7所示。該模型的平均氣動弦長c=1 m,模型半展長2.16 m,參考面積2.05 m2。前緣縫翼和后緣襟翼分別偏轉30°和25°,前緣縫寬和高均為0.015c,后緣縫高和重疊部分分別為0.015c和0.005c。來流馬赫數Ma=0.2,雷諾數Re=4.3×106。

圖7 NASA TrapWing 模型及本文生成的機體表面網格Fig.7 NASA TrapWing geometry and surface mesh of the proposed method
圖8展示了本文計算得到的升、阻力系數(CL和CD)與實驗[24]以及Wang等[25]計算結果的對比。本文計算結果與實驗結果吻合很好,在中小攻角時,本文計算結果要優于Wang等的計算結果;在大攻角情況下,計算結果與實驗值存在一定的偏差,但差值仍小于3%。因此本文選取的計算方法可以滿足計算精度的要求。


圖8 本文計算得到的NASA TrapWing的升、阻力系數與實驗[24]以及Wang等[25]計算結果對比Fig.8 Comparisons between calculated lift and drag coefficients of NASA TrapWing in this paper and those by Wang et al. [25] as well as experiment[24]
3 結果與討論
3.1 Starship大攻角下氣動特性
圖9對稱面流線展示了5°和60°攻角無舵偏情況下,船體對稱面流線分布,流線上的顏色云圖為速度云圖,船體表面云圖為壓力云圖。圖10展示了這兩個工況沿X方向一系列截面上的渦量云圖。由圖9的流線分布可知,在5°攻角時,流場基本貼體,僅在船體尾部存在一個分離區,船體前緣駐點靠近船體前緣點,在頭錐部分,由于流道收縮,存在很明顯的加速減壓效應;在60°攻角時,船體背風面基本分離,前緣駐點明顯下移,船體表面壓力分布主要受渦系結構影響。
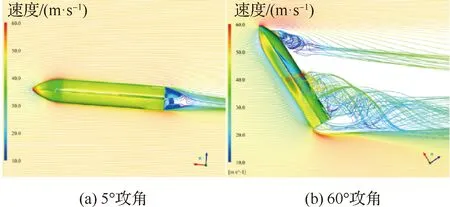
圖9 對稱面流線Fig.9 Streamlines starting from symmetry plane

圖10 Starship船體背風面渦量云圖Fig.10 Vorticity contour in leeward side of Starship
圖10清晰地展示了船體背風面的渦結構,在5°攻角時,主要有4組渦系結構,包括渦系a(前翼前緣渦)、渦系b(前翼內側產生的渦)、渦系c(兩側邊條渦)以及渦系d(后翼前緣渦)。這4組渦系結構相對穩定,并逐漸向下游發展。而在60°攻角時,在上述4組渦系的基礎上增加了一對由船體頭部前緣產生的渦系結構e,并且機體左右兩側渦系不對稱性非常明顯,隨著渦系向下游發展,各渦系之間會逐漸發生融合,特別是渦系b、c、d之間的融合異常顯著。這種渦系結構的非對稱性必然會造成表面壓力分布的非對稱性,如圖11 所示,船體的下表面左右壓力分布較為對稱,而船體上表面的壓力分布則存在明顯的非對稱性。這種強的非對稱特性會對舵面的控制特性帶來非常顯著的影響。

圖11 60°攻角時船體上下表面壓力云圖Fig.11 Pressure contour on Starship upper and lower surface at 60° of angle of attack
3.2 Starship舵面控制率
Starship采用的舵面控制方式如圖12所示,其可以分別通過前翼的單側和雙側偏轉、后翼的單側和雙側偏轉以及前后翼的組合偏轉來實現飛行器俯仰、偏航以及滾轉三軸的控制。該種舵面控制形式與圖13中基于副翼以及尾翼的舵面控制形式存在很大的不同,下文將對該種新型舵面控制形式的控制率進一步研究,定義舵面向上偏轉為正。

圖12 Starship所采用的舵面控制方式Fig.12 Control surface model of Starship
圖14展示了5°攻角下升力系數和阻力系數隨舵偏角的變化。后翼偏轉對升力系數的影響較為顯著,隨著后翼偏轉角度的增加,升力系數單調減小,偏轉角度與升力系數基本成線性關系。由此可見后翼作為主升力面,其偏轉對升力影響較大。前翼偏轉則對阻力系數的影響較為顯著,隨著前翼偏轉角度的增加,阻力系數增加,偏轉角度與阻力系數基本線性相關。其主要原因為前翼旋轉軸并非與機體軸平行,因此其偏轉后會增加迎風面積,從而增加阻力。同時值得注意的是,在前翼偏轉后會引起升力系數的增加,當其偏角小于40°時,升力系數與前翼偏角基本線性相關。

圖13 傳統襟副翼控制方式Fig.13 Control model through traditional flaperon
圖15展示了5°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖。在舵面偏轉以后,后翼前緣渦的強度明顯降低,后翼上表面受前緣渦影響而形成的低壓區減小,如圖15(a)橢圓框中所示。因此,偏轉一側升力系數降低。同時,由于升力方向翼面有效面積的減小,會造成偏轉一側翼面升力的減小。綜合上述兩個原因,后翼升力系數將隨著偏轉角度的增加而單調減小。


圖14 5°攻角下升力系數和阻力系數隨舵偏角變化Fig.14 Variations of lift coefficients and drag coefficients with wings deflection angle at 5° angle of attack
圖16展示了側向力系數CY和三軸力矩系數(Cmx,Cmy,Cmz)隨舵偏角的變化,其中取矩點為機頭位置。前翼與后翼偏轉對于側向力的影響非常接近,當偏轉角小于40°時,側向力系數隨著偏轉角的增加單調減小,兩者近似線性相關。對比圖16與圖14可知,后翼偏轉引起的側向力與阻力的變化相較于升力要小一個量級,因此滾轉力矩系數和俯仰力矩系數的變化主要由后翼偏轉造成的升力變化引起,其變化趨勢與后翼升力系數的變化趨勢非常接近,如圖16(b)和圖16(c)所示。后翼偏轉角與滾轉力矩系數和俯仰力矩系數均存在較好的線性相關性。前翼偏轉對俯仰力矩系數影響較小,對滾轉力矩系數幾乎無影響。而偏航力矩系數則主要由側向力的變化引起,當偏轉角度小于40°時,偏航力矩系數與前翼或者后翼的偏轉角基本線性相關,且前翼的舵效約為后翼的40%。

圖15 5°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖Fig.15 Pressure contour on surface and vorticity contour in leeward side of Starship with one side rear wing deflecting 60° at 5° angle of attack
在確定了舵面偏轉與三軸力和力矩的關系之后,便可以確定Starship的三軸控制方式。因為后翼偏轉角與俯仰力矩系數的線性相關性較好,所以可以通過雙側后翼的對稱偏轉實現俯仰方向的控制;前翼在偏轉角小于20°時,偏轉角與俯仰力矩系數相關性較好,因此雙側前翼可以通過微幅偏轉實現俯仰方向的精確控制。前翼的偏轉對偏航力矩系數的影響非常顯著,同時滾轉力矩系數和俯仰力矩系數的耦合變化則較小,所以通過雙側前翼的非對稱偏轉可以實現偏航方向的控制。后翼偏轉角與滾轉力矩系數線性較好,可以用于控制滾轉運動,但后翼的偏轉同時還會耦合偏航力矩的變化,可以通過雙側后翼和前翼的組合偏轉實現滾轉方向的控制。Starship姿態的控制流程圖如圖17所示。
通過以上分析可知,Starship僅憑前后4個翼面的組合偏轉即可實現三軸運動的控制。對于不需要大翼面積的飛行器,如再入飛行器,該種控制方式非常適合。
圖18為60°攻角時新型舵面控制形式以及傳統襟副翼控制方式下,升力系數和阻力系數隨舵偏角度的變化,其中虛線和實線分別為新型舵面后翼單側偏轉和雙側偏轉后升力系數變化的線性擬合。相比于5°攻角,升力系數以及阻力系數與舵偏角度的相關性明顯下降,并且由于流場的不對稱性,雙側偏轉也并非單側偏轉的疊加。其中,前翼的偏轉與升力系數和阻力系數的相關性非常弱。后翼單側偏轉與升阻力的相關性減弱,但其雙側偏轉時,后翼偏轉角與升力系數仍保持了非常好的線性相關性。無論是單側偏轉還是雙側偏轉,新型舵面控制方式的舵偏角與升力系數的線性相關性均優于傳統的襟副翼控制方式(圖18中五角星標所示)。

圖17 Starship姿態控制流程圖Fig.17 Flow chart of Starship attitude control
圖19展示了60°攻角時新型舵面控制形式以及傳統襟副翼控制方式下,側向力系數和三軸力矩系數隨舵偏角度的變化,其中虛線和實線分別為單側偏轉和雙側偏轉后升力系數變化的線性擬合。無論采用新型舵面控制形式還是傳統襟副翼控制方式,側向力系數和偏航力矩系數均隨著舵偏角的增加在零點附近左右擺動,并不存在很強的相關性,如圖19(a)和圖19(d)所示,其值受渦系的擺動和脫落影響很大。對于新型舵面控制形式,滾轉力矩系數和俯仰力矩系數與后翼偏轉仍然存在較強的線性相關性,尤其是俯仰力矩系數受后翼偏轉引起的升力變化的影響,在后翼雙側偏轉時,其與偏轉角近似線性相關。但是傳統的襟副翼控制在大攻角下基本失效,俯仰力矩系數和滾轉力矩系數與副翼偏角相關性并不強。因此,在60°攻角下,傳統的襟副翼控制方式基本失效,而Starship仍可通過后翼兩側同時偏轉實現俯仰控制。新型舵面控制方式在大攻角下的可控性是傳統襟副翼控制方式所不具有的能力。

圖18 60°攻角下升力系數和阻力系數隨舵偏角變化Fig.18 Variations of lift coefficients and drag coefficients with wings deflection at 60° angle of attack
圖20展示了60°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖。船體背風面左右兩側渦結構不對稱性明顯,使得船體背風面壓力分布也存在明顯的不對稱性,尤其是兩側邊條渦形成的低壓區。隨著左右兩側渦系的間歇性脫落,側向力必然會產生波動,從而造成偏航力矩的波動。
在此攻角下,后翼前緣渦脫體,其形成的低壓區消失,因此后翼偏轉后上翼面壓強差別并不明顯。但是氣流沖擊后翼下表面所形成的高壓顯著增加,后翼的偏轉對于下表面壓強的影響較為顯著。由于后翼偏轉引起的后翼下表面壓強的降低以及升力方向翼面有效面積的減小使得后翼的升力系數隨著偏轉角度的增加而近似線性減小,因此即使在船體背風面存在大的分離區,星船仍可通過后翼雙側的偏轉實現俯仰方向的控制。

圖19 60°攻角下側向力系數與三軸力矩系數隨舵偏角變化Fig.19 Variations of lateral force coefficients and three-axis torque coefficients with wings deflection at 60° angle of attack

圖20 60°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖Fig.20 Pressure contour on surface and vorticity contour in leeward side of Starship with one side rear wing deflecting 60° at 60° angle of attack
在進入著陸準備后,船頭仰起,攻角將大于90°,相對于船體來說,意味著來流方向反向,此時的流場將嚴重背離傳統的襟副翼設計流態。而對于“星船”所采用的舵面形式來說,由于其沿飛行器軸線方向偏轉,因此其控制模式不會發生根本性變化,只是舵面的前后緣發生了轉換。圖21展示了120°攻角時新型舵面控制形式升力系數和三軸力矩系數隨舵偏角度的變化(取矩點為機頭位置)。相比于60°攻角,此時舵面偏轉與升力系數以及三軸力矩系數的相關性非常強。不僅在俯仰通道,在滾轉通道和偏航通道其均能保持良好的操縱特性。因此,在“星船”著陸階段其仍能通過舵面偏轉對自身姿態進行有效控制,但是注意到舵面偏轉將會耦合升力系數的變化,因此其還需通過矢量推力對自身軌跡進行控制。通過舵面和矢量推力的組合控制,“星船”將能在著陸階段實現對自身姿態和軌跡的精確控制。

圖21 120°攻角下升力系數與三軸力矩系數隨舵偏角度變化Fig.21 Variations of lift coefficients and three-axis torque coefficients with wings deflection at 120° angle of attack
圖22展示了120°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖。相比于60°攻角時,船體背風面的壓力分布趨于左右對稱,結合背風面渦結構云圖可知,左右翼面的翼尖渦和邊條產生的渦系相對獨立,不存在明顯的相互誘導和干擾,渦系結構相對穩定,背風面由邊條渦形成的低壓區大幅減弱。因此相比于60°攻角工況,“星船”舵面偏轉與三軸力矩系數的相關性大大增強。即當來流攻角大于90°時,“星船”舵面的控制效能反而有所增強,這將有利于其降落時的精準控制。
3.3 Starship非定常俯仰運動模擬
鑒于60°攻角下,Starship仍可通過后翼偏轉實現有效的俯仰運動控制,本文通過采用整體動網格方法對后翼雙側偏轉60°情況下整船的非定常俯仰運動過程進行了數值模擬,旋轉軸通過重心平行于Y軸。整個運動過程如圖23所示,其中箭頭表示船體對稱平面上的速度矢量,云圖代表速度的大小。圖24展示了整個運動過程中俯仰角加速度、角速度以及俯仰角隨時間的變化。

圖22 120°攻角下后翼單側偏轉60°船體上下表面壓力云圖及船體背風面渦量云圖Fig.22 Pressure contour on surface and vorticity contour in leeward side of Starship with one side rear wing deflecting 60° at 120° angle of attack

圖23 后翼雙側60°舵偏時船體在氣動力 作用下的俯仰運動過程Fig.23 Starship pitching motion under aerodynamic forces with both sides rear wing deflecting 60°
圖24 Starship俯仰角加速度、角速度以 及俯仰角隨時間變化Fig.24 Variations of pitching angular acceleration, angular velocity and angle of Starship with time
在后翼偏轉以后,整船受到一個負力矩,逐漸進行抬頭運動。同時,背風面的分離區逐步變大,俯仰角加速度的值單調減小,但是在t≤3 s時,角加速度一直保持負值,因此在此時間歷程內,Starship一直在作角加速度逐步減小的加速旋轉運動。在2.5 s內,整船的俯仰角變化接近45°。因此在降落階段,Starship完全可以通過后翼的偏轉來實現俯仰控制。
4 結 論
針對Starship的再入飛行和著陸階段的飛行控制方式,對Starship新型舵面形式的氣動特性進行了系統的研究,主要結論如下:
1) 星船舵面在小攻角和大攻角下均能實現對船體姿態的有效控制,其中后翼為主控制面。
2) 后翼偏轉角與俯仰力矩系數的線性相關性較好,可以通過雙側后翼的對稱偏轉實現俯仰方向的控制;前翼的偏轉對偏航力矩系數的影響顯著,且與滾轉力矩系數和俯仰力矩系數的耦合較小,可以通過雙側前翼的非對稱偏轉實現偏航方向的控制;后翼偏轉角與滾轉力矩系數線性較好,但后翼的偏轉會耦合偏航力矩的變化,可以通過雙側后翼和前翼的組合偏轉實現滾轉方向的控制。
3) 在大攻角下,尤其是在著陸階段攻角大于90°的情況下,傳統的襟副翼控制方式失效可能性較大,而Starship新型舵面控制形式前翼和后翼偏轉與三軸力矩系數的相關性仍非常強。其對于俯仰通道、滾轉通道和偏航通道均能保持良好的操縱特性。
[21] SIPPEL M, MANFLETTI C, BURKHARDT H. Long-term/strategic scenario for reusable booster stages[J]. Acta Astronautica, 2006, 58(4):209-221.