電機車電控系統性能提升優化方案
2021-03-27 16:35:10張薇
中國設備工程 2021年5期
關鍵詞:變頻器
張薇
(江蘇睿龍電氣設備有限責任公司,江蘇 常州 213000)
隨著時代的進步、技術的發展,工礦機車也發生了翻天覆地的變化。電力機車已經逐步取代了傳統的柴油機機車。但是,電力機車的電控系統卻發展緩慢,多數沿用傳統的電控方案,也就是蓄電池提供540V的直流電源給變頻驅動,進而將其轉換為0~380V的三相交流電源,以此來對電機進行驅動牽引。主控制器利用開關信號來對變頻驅動和多檔調速進行啟動和停止,車輛的實際運行狀態可以通過控制臺上面的指示燈和儀表來進行顯示。
1 工礦電機車的組成結構
某工礦機車主要由電氣和機械兩部分構成,其中,機械單元主要有車架、軸箱、制動設備、緩沖連接設備和制動手輪等。電氣單元則主要包括控制裝置、受電弓和照明等,見圖1。
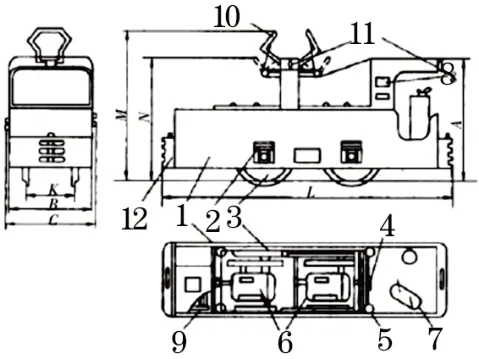
圖1 架線式電機車的供電原理圖
礦用電力機車的任何一個部件均有相應的作用,在軸承箱蓋上安裝的有所有的部件,該軸承箱蓋是由彈簧支架支撐起來的。在機車實際運行中,極有可能和其他設備之間發生碰撞。為盡可能降低碰撞帶來的損失,也就是將變形降至最低,可以將設備鋼板的厚度適當的提高。此外,在彈簧托架的作用下,各個輪胎內部能夠均勻的承受機車的質量。這樣一來,機車就能夠平穩地運行,有效降低運行過程中出現的振動現象,防止機車脫軌。
2 礦用電機車的工作原理
電池型和架空線路型電力機車為最主要的兩種機車類型:(1)架空線路型機車:這種類型的電力機車,其主要原理在于轉換電流、整流和降壓操作。具體來說,處于架空線路末端的高壓經過一系列的操作,完成上述任務,最終實現降壓的目標,以此確保電源能夠經過一系列轉換后適合機車的電壓值。架空線路作為正極,軌道屬于負極。在受電弓裝置的作用下,引入電流進入機車內部,因此,實現電力機車的啟動運行。(2)電流型電力機車。由于電力機車內部安裝的有電池,其無須對電流和電壓進行轉換,只需要借助電池能量就可以驅動電力機車。
3 傳統電機車電控系統的不足
45T和55T電力機車是現階段市場上最主要的機車類型。其驅動方式為同一變頻驅動,都由兩臺牽引電機進行驅動。但是,這種傳統的電機驅動方式,問題重重,具體表現為:(1)由于其驅動方式為變頻驅動,也就是說,需要逆變器輸出相同的電壓和頻率到牽引電機中,因而牽引電機的轉速基本趨同。但是,實際運用過程中,根本無法確保電力機車的每個輪子都承受相同的力度,僅能對電機速度予以調整,來盡可能地平衡各個輪子之間承受的不斷的載荷力。若牽引電機未能調整到位,載荷不夠平衡,則會引發電機燒毀等安全事故。(2)V/F控制是傳統機車變頻控制辦法。在零速的時候,直流輸出給牽引電機,并向其提供阻力轉矩。若電力機車在斜坡位置進行剎車的時候,滑倒風險極大。
4 電機車電控系統優化方案
隨著技術的發展進步,電力機車也不斷在攻克難關,不斷完善更新。其中,65T大噸位的電力機車開始誕生。該種電力機車的驅動為4臺牽引電機,并將旋轉變壓器安裝在電機軸側,其功能在于為后續的機車運行速度提供指導。所有的牽引電機均變頻驅動,控制方式為閉環矢量。CAN總線作為數據傳輸方式,主要用于變頻器之間的信息傳遞,以此來及時跟蹤機車運行速度,對負載及時予以平衡。信號傳遞通過主控制器傳遞給PLC,然后在利用CAN總線輸送給對應的變頻器。在PLC作用下,變頻驅動器的運行速度、電流以及電壓等相關信息均能夠反饋給人機界面。這樣,我們就可以直觀地對電力機車的實際運行狀況進行查看。
5 電機車電控系統優化方案的優勢
相比較于傳統的解決方案,65T電力機車的誕生極大地優化了電氣控制系統。具體表現如下。
(1)閉環矢量控制。在該電機電氣系統中,閉環矢量控制的設計,能夠實現零速轉矩輸出。這樣一來,在電機停止運行的時候,并不會發生滑倒等事故。同時,旋轉變壓器安裝在電機軸側,對其運行速度進行實時跟蹤反饋。這樣改造思路,較好地避免了斜坡上電機滑落滾動等危險。
(2)一對一控制變頻驅動。在65T電力機車中,牽引電機的控制方式為一對一。每臺牽引機均有一臺變頻器驅動。在速度模式下,一臺變頻器為主要工作;在扭矩模式下,其他變頻器全部作為輔助進行工作。PLC發布命令給變頻器主機,在接收到命令后控制電機的運行速度。接著,從動器會接收來自CAN總線的運行、速度以及轉矩等命令。然后從動器會將上述命令傳輸給主變頻主機,通過主從配合的方式,實現了4臺電機的安全運行。并能夠實時跟蹤電機運行速度,實現載荷平衡,有效控制電機電流差在±5%以內。
(3)故障跛行。由于傳統的電機控制方式為一對多,若其中一臺變頻器或者電機出現故障,整個電機系統立即停機,無法啟動。而65T電機系統的變頻控制為一對一,這樣一來,即便其中某一個或者某2個系統出現故障,也并不會導致電機系統出現停機現象。此時,只需要將故障部位繞開,依然可以啟動電力機車。
(4)開環/閉環控制。由于電力機車處于高振動、高沖擊和高濕度的工作環境之中,為了更好地適應上述惡劣環境,多將旋轉變壓器安裝在軸機內側,作為速度反饋裝置。然該裝置一旦出現故障,牽引電機立即停機,無法啟動。在65T電力機車中,控制模式調整為閉環/開環矢量控制模式。也就是說,一旦其中任何一個部件出現故障,駕駛人員也可以切換電力機車為開環模式,此時無須停機,可以繼續運行,提升了電力機車的運行靈活性和可靠性。
(5)空載模式。65T電力機車設計的為空載模式,借助人機界面。可以設置4臺牽引機中的任意一臺為空載模式,此時,僅需要2~3臺牽引電機便可以啟動。而滿載模式下,要想啟動電力機車,則需要3~4臺牽引電機。空載模式的設計,能夠極大地節約電力機車的能耗,實現節能的目標。
(6)保護方案完善。65T電力機車驅動為一對一,能夠從全方位實現對電力機車的各種保護,防范電機出現燒毀現象。
綜上所述,電力機車在工礦企業中運用的最廣泛,隨著工礦企業的發展,傳統的電力機車的控制系統已經無法滿足實際需求。此時,就亟待對電力機車控制系統予以優化。本文在分析了傳統電力機車控制系統不足的基礎上,提出了65T電力機車控制系統優化方案。控制系統改為閉環/開環矢量控制,主從負荷進行合理分配。同時,載荷分擔,能夠避免大負荷和大斜坡條件下機車打滑現象。此外,通過速度反饋裝置的配置,能夠靈活保護電機系統,避免電機燒毀,確保了電力機車的安全可靠穩定運行。
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
