氣流輸送式播種機(jī)測(cè)控技術(shù)研究進(jìn)展*
2021-03-30 11:48:38王麗麗梁學(xué)修胡小鹿樊學(xué)謙趙博周利明
中國(guó)農(nóng)機(jī)化學(xué)報(bào) 2021年2期
王麗麗,梁學(xué)修,胡小鹿,樊學(xué)謙,趙博,周利明
(1. 中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院土壤植物機(jī)器系統(tǒng)技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京市,100083; 2. 工業(yè)和信息化部計(jì)算機(jī)與微電子發(fā)展研究中心(中國(guó)軟件評(píng)測(cè)中心),北京市,100044; 3. 中國(guó)農(nóng)村技術(shù)開發(fā)中心,北京市,100045)
0 引言
播種作業(yè)是保證作物產(chǎn)量的重要環(huán)節(jié),氣流輸送式播種機(jī)目前已在國(guó)外的大型農(nóng)場(chǎng)廣泛應(yīng)用,具有寬幅結(jié)構(gòu)、智能控制且作業(yè)速度快的特點(diǎn)[1-2]。美國(guó)生產(chǎn)的氣力式免耕變量播種機(jī)通過(guò)控制閥對(duì)風(fēng)扇速度進(jìn)行調(diào)整,將氣體穩(wěn)定地輸送到排種系統(tǒng)[3]。意大利生產(chǎn)的播種機(jī)可以實(shí)現(xiàn)定位施肥,管理種肥分配、種子堵漏監(jiān)控等。法國(guó)生產(chǎn)的氣吸式精量點(diǎn)播機(jī)能夠?qū)崿F(xiàn)一致的負(fù)壓分配,保障了株距的均勻性,播種單體采用拉簧的形式增加下壓力,精確控制投種,確保了種子的完美定位[4-5]。德國(guó)生產(chǎn)的氣吸式播種機(jī)能夠在平整地面實(shí)現(xiàn)高速作業(yè),速度可達(dá)15 km/h,工作幅寬約為8~12 m[6]。德國(guó)生產(chǎn)的氣吸式精密播種機(jī)可用于精準(zhǔn)的子粒種植,排種盤采用獨(dú)特的外開放凹盤,通過(guò)與全新的推卷裝置配合實(shí)現(xiàn)作物的快速分離,種子在吸種區(qū)完成吸種,經(jīng)過(guò)攜種區(qū),在刮種器作用下完成刮種,到達(dá)無(wú)壓力區(qū)吸力瞬時(shí)消失,種子在自身重力作用下完成排種[7]。國(guó)內(nèi)電動(dòng)排種器處于實(shí)驗(yàn)研究階段,產(chǎn)品化處于初步階段。中國(guó)農(nóng)業(yè)大學(xué)研究了組合吸孔式小麥精量排種器,提高了播種均勻度和精準(zhǔn)度[8-9]。北京某公司研制的2BM-6型氣吸式免耕播種機(jī)可一次完成側(cè)深施化肥、清理種床秸稈殘茬、整理種床、單粒播種、施口肥、覆土、鎮(zhèn)壓等工作[10]。吉林大學(xué)和黑龍江八一農(nóng)墾大學(xué)研制了高速氣吸式精量播種機(jī)[11-12]。河北某公司研制的2BYQF-6輕型氣吸式玉米播種機(jī)通過(guò)四連桿仿形機(jī)構(gòu)實(shí)現(xiàn)播深一致。中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院等單位設(shè)計(jì)的傳感器可以實(shí)現(xiàn)多行播種量和漏播的監(jiān)測(cè)和報(bào)警。MS8000系列精量播種機(jī)的EASY-SET系統(tǒng)可實(shí)現(xiàn)行距快速調(diào)節(jié),電控播種監(jiān)測(cè)器能避免漏播、重播和堵塞報(bào)警[13-15]。隨著我國(guó)城鎮(zhèn)化和土地流轉(zhuǎn)和耕地集約化進(jìn)一步發(fā)展,氣流輸送式播種機(jī)是播種機(jī)未來(lái)的發(fā)展方向。但我國(guó)氣流輸送式播種機(jī)研究起步晚、基礎(chǔ)薄弱,缺乏理論基礎(chǔ)和實(shí)踐經(jīng)驗(yàn),商品化產(chǎn)品較少,研究主要在集中在排種分配器上[16-17],涉及其測(cè)控技術(shù)的研究更少。本文主要敘述了氣流輸送播種機(jī)測(cè)控技術(shù)的國(guó)內(nèi)外研究與應(yīng)用現(xiàn)狀,為國(guó)內(nèi)氣流輸送式播種機(jī)測(cè)控系統(tǒng)研發(fā)提供參考。
1 播種檢測(cè)技術(shù)
精確的檢測(cè)數(shù)據(jù)對(duì)于播種質(zhì)量至關(guān)重要,目前播種機(jī)上需要檢測(cè)的數(shù)據(jù)主要包括種箱料位、種子堵漏與流量、播深等。
1.1 種箱料位檢測(cè)
當(dāng)種箱出現(xiàn)種子排空時(shí),會(huì)導(dǎo)致漏播現(xiàn)象的發(fā)生,引起農(nóng)業(yè)生產(chǎn)損失。van Bergeijk等[18]學(xué)者運(yùn)用動(dòng)態(tài)稱量方法,通過(guò)獲取肥料質(zhì)量流量并結(jié)合位置信息,實(shí)現(xiàn)基于空間分布的肥量合理施用。美國(guó)學(xué)者[19-20]采用電容法設(shè)計(jì)了用于檢測(cè)大氣環(huán)境和土壤水分傳感器。在此基礎(chǔ)上,國(guó)內(nèi)王大可等利用電容式接近開關(guān)、光電傳感器對(duì)氣吸精播機(jī)施肥量無(wú)線計(jì)量監(jiān)測(cè)系統(tǒng)進(jìn)行了研究,用于檢測(cè)化肥箱的工作狀態(tài)。周利明等[21]利用電容傳感器法計(jì)算施肥量,能夠單獨(dú)監(jiān)測(cè)各個(gè)排肥管并發(fā)送到上位機(jī)進(jìn)行實(shí)時(shí)顯示。苑嚴(yán)偉等[22]設(shè)計(jì)了玉米免耕播種施肥機(jī)作業(yè)監(jiān)測(cè)系統(tǒng),利用電容傳感器的方法,通過(guò)調(diào)整伺服電機(jī)控制播種施肥量,但田間灰塵、水分等因素會(huì)影響到電容傳感器的精度。
氣流輸送式播種機(jī)的種箱大多是封閉式種箱,需要通過(guò)料位傳感器檢測(cè)種子剩余量。料位傳感器安裝在種箱底部,當(dāng)種子低于傳感器底部位置時(shí),提示駕駛員需要補(bǔ)充種子。Hopper Level Sensor光電式傳感器安裝在種箱底部,當(dāng)種子高度低于傳感器底部時(shí),接收端收到發(fā)射端的光信號(hào)并觸發(fā)報(bào)警;電容式料位傳感器是根據(jù)種子顆粒與空氣介電常數(shù)的差異性引起電容值的變化設(shè)計(jì)的,并可調(diào)整傳感器靈敏度以適應(yīng)于不同的種子。
2019年德國(guó)漢諾威農(nóng)機(jī)展上,USC-RPO(Universal Seeder Control)通用播種機(jī)控制系統(tǒng)是一種模塊化的、高技術(shù)含量的條播機(jī)控制系統(tǒng),用于監(jiān)測(cè)和控制機(jī)器所有功能:堵塞監(jiān)測(cè)、變量播種和對(duì)行播種。在USC-PRO系統(tǒng)上安裝新的PRO-SEEDER種子傳感器,可以計(jì)數(shù)和檢查種子流量,無(wú)需校準(zhǔn)。采用can總線技術(shù)的PRO-SEEDER種子傳感器,允許操作員對(duì)每一行的種子流量進(jìn)行計(jì)數(shù)和檢查,甚至能補(bǔ)償灰塵的沉積,其可識(shí)別的最小種子能到直徑1 mm,如圖1所示。
圖1 PRO-SEEDER種子傳感器Fig. 1 PRO-SEEDER sensor
ESD(Electronic Seed Driver)是一種簡(jiǎn)單的、模塊化的精密播種機(jī)系統(tǒng),采用直流無(wú)刷電機(jī)替代機(jī)械傳動(dòng)結(jié)構(gòu),直接驅(qū)動(dòng)排種盤。該系統(tǒng)可以與市場(chǎng)上的GPS設(shè)備通過(guò)ISOBUS接口進(jìn)行連接,自動(dòng)管理行合攏,避免了重復(fù)播種,節(jié)省了種子,可根據(jù)行進(jìn)速度自動(dòng)調(diào)節(jié)播種速率。UNI-SEEDER是一種特殊的種子傳感器,與傳統(tǒng)的種子傳感器不同,它可以配置成不同的性能。由于有一個(gè)微控制器,它保證了對(duì)來(lái)自紅外接收器的模擬信號(hào)的直接分析。利用先進(jìn)的數(shù)字分析技術(shù),它可以看到非常小和快速的種子,并可以將它們與播種過(guò)程中的灰塵、泥土或種子殘留物區(qū)分開來(lái),其可識(shí)別的最小種子能到直徑1.5 mm。
1.2 堵塞和流量檢測(cè)
氣流輸送式播種機(jī)的播種量檢測(cè)方法主要有光電法、聲電法、壓電法等,國(guó)外目前已有很多商品化的播種量檢測(cè)傳感器用于堵漏或計(jì)數(shù)監(jiān)測(cè)。美國(guó)學(xué)者Wrobel[23]采用光電傳感器監(jiān)測(cè)通過(guò)光區(qū)的物體,實(shí)現(xiàn)對(duì)作物種粒的實(shí)時(shí)監(jiān)測(cè),駕駛員可通過(guò)電子監(jiān)控系統(tǒng)查看作業(yè)速度、播種總量與每行播種量、相鄰種子之間的距離等。Garcia等[24]研制了紅外光電傳感器監(jiān)測(cè)系統(tǒng),當(dāng)排種盤或?qū)ХN管發(fā)生堵塞時(shí),故障指示燈亮,實(shí)時(shí)監(jiān)測(cè)每個(gè)輸種管的種子流信息。美國(guó)科研人員Haase[25]開發(fā)的監(jiān)測(cè)系統(tǒng)包括速度傳感器和光電傳感器,速度傳感器用來(lái)測(cè)量當(dāng)前的地輪轉(zhuǎn)速,光電傳感器實(shí)時(shí)監(jiān)測(cè)排種器的工作狀態(tài),顯示屏用來(lái)顯示播種量、重播量、漏播量等播種作業(yè)信息。2013年,Taghinezhad等[26]為了監(jiān)測(cè)大豆、小麥作物排種的均勻度,設(shè)計(jì)了一款電容傳感裝置,用來(lái)判別播種的間距是否合格。2007年,布盧農(nóng)業(yè)大學(xué)的Leemans等[27]開發(fā)了視覺(jué)相機(jī)監(jiān)測(cè)種粒下落系統(tǒng),對(duì)排種器工作狀態(tài)監(jiān)測(cè)并引導(dǎo)播種機(jī)進(jìn)行相關(guān)的作業(yè)。國(guó)內(nèi)對(duì)專用于播種機(jī)的播種施肥流量傳感器也有一定的研究。丁幼春等[28]采用壓電薄膜傳感器采集油菜粒的下落信息,并實(shí)時(shí)顯示排種信息。齊龍等[29]采用機(jī)器視覺(jué)傳感器統(tǒng)計(jì)種粒數(shù)量和缺種數(shù)量,用于指導(dǎo)種量偏少的穴孔補(bǔ)種。
漏播或重播也是目前精量播種作業(yè)中不可避免的異常情況,影響作物生長(zhǎng),降低產(chǎn)量,氣流分配器作為關(guān)鍵部件,其結(jié)構(gòu)形式可分為垂直式氣流分配器和水平式氣流分配器,如圖2所示。由于垂直式分配器中存在氣流上升管段,所以能量消耗大,在分配頭處存在方向突變易引起種子機(jī)械損傷,它的優(yōu)點(diǎn)是種子分配均勻,播種均勻性好;而水平式分配器很難控制氣流分布,易造成種子分布不均勻的后果,因此垂直式氣流分配器應(yīng)用較為廣泛。
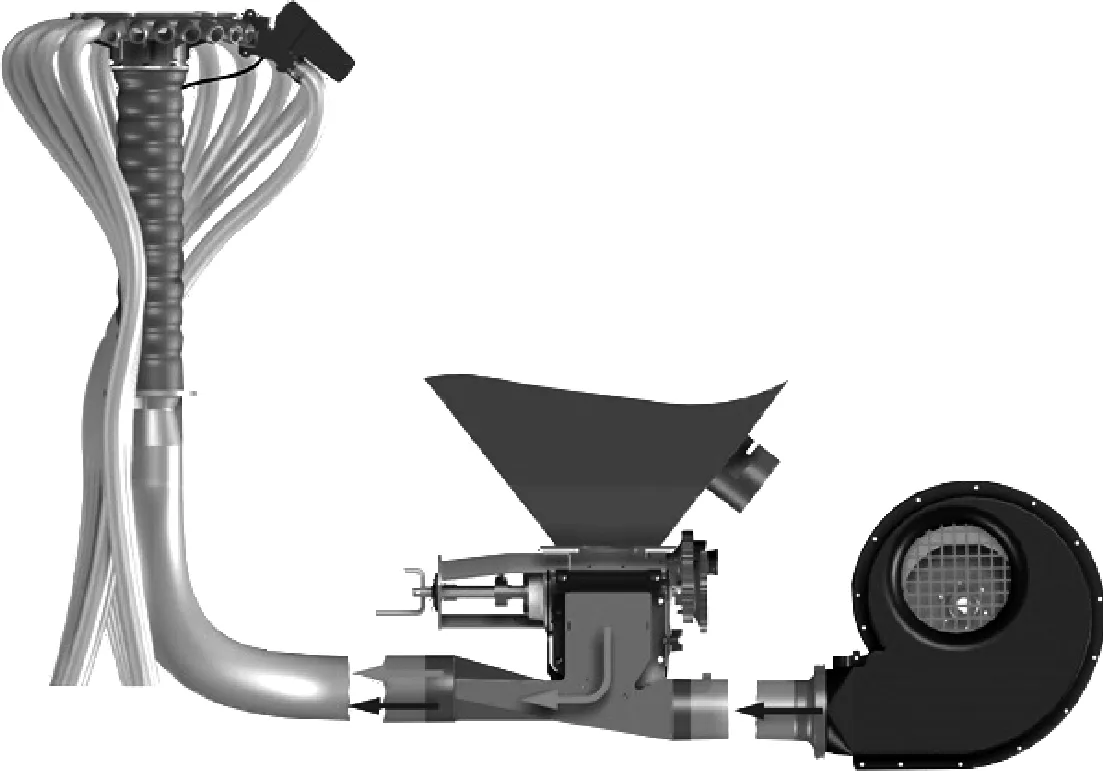
(a) 垂直式氣流分配器

(b) 水平式氣流分配器
對(duì)于氣流分配器來(lái)說(shuō),一旦某一行發(fā)生堵塞現(xiàn)象,不僅導(dǎo)致本行漏播,還會(huì)影響其他行的播種一致性,所以必須實(shí)時(shí)監(jiān)測(cè)播種機(jī)的運(yùn)行狀態(tài),實(shí)時(shí)檢測(cè)各行的播種均勻性并進(jìn)行故障報(bào)警。
1.2.1 光電傳感器
光電式傳感器分可為對(duì)射式和漫反射式。由于對(duì)射式傳感器信號(hào)易處理、檢測(cè)精度高,因此在播種流量檢測(cè)中應(yīng)用相當(dāng)廣泛[30]。BlackEye種子流量傳感器采用光電對(duì)射原理。6路特殊的紅外發(fā)射單元均勻覆蓋整個(gè)傳感器內(nèi)部區(qū)域,檢測(cè)精度接近100%(油菜籽、大麥準(zhǔn)確率為99%,小麥、豌豆準(zhǔn)確率為98%)。Meng等[31]設(shè)計(jì)了基于無(wú)線傳輸和激光傳感器的播種檢測(cè)系統(tǒng),在5 km/h的速度下試驗(yàn)準(zhǔn)確率約98%。
國(guó)內(nèi)關(guān)于光電式播種檢測(cè)傳感器的研究有很多,但是多用于堵塞檢測(cè),并且這些傳感器不是針對(duì)氣流輸送播種機(jī)設(shè)計(jì)的。車宇等[32]采用紅外LED產(chǎn)生光束,紅外光電二極管接收光束,開發(fā)了對(duì)射式傳感器。接收端和發(fā)射端采取分離式封裝方式,3只紅外LED覆蓋整個(gè)監(jiān)測(cè)空間,監(jiān)測(cè)準(zhǔn)確率可達(dá)95%以上。盧彩云等[33]針對(duì)傳統(tǒng)光電式傳感器易受灰塵干擾的問(wèn)題,設(shè)計(jì)了一款新型光電傳感器。該傳感器采用砷化鎵紅外發(fā)光二極管發(fā)出光束、紅外光電三極管接收光束,采用4對(duì)發(fā)射單元和接收單元,圍繞著圓管均勻等間隔分布。采用模擬信號(hào)輸出時(shí),雖然灰塵濃度不同會(huì)影響接收端的輸出電壓,但是種子的遮光作用更加強(qiáng)烈,因此,輸出電壓仍然會(huì)有一個(gè)明顯的區(qū)分。在沒(méi)有種子通過(guò)傳感器時(shí),輸出表現(xiàn)為一個(gè)動(dòng)態(tài)平衡。在10 km/h 的工作速度下進(jìn)行試驗(yàn),種管故障狀態(tài)監(jiān)測(cè)精度大于98%。
1.2.2 聲電傳感器
為了提高傳感器檢測(cè)精度,研究人員從以下方面進(jìn)行了優(yōu)化設(shè)計(jì):使用更高采樣頻率的聲卡以及更厚的不銹鋼片來(lái)提高聲音的衰減速度;加強(qiáng)檢測(cè)腔室的噪聲隔離以減弱環(huán)境噪聲,開發(fā)自適應(yīng)檢測(cè)算法和數(shù)據(jù)調(diào)理方法來(lái)消除噪聲干擾。
國(guó)外某公司于2015年設(shè)計(jì)了一款聲電式傳感器,如圖3所示,該傳感器包括傳感器板、聲音腔室、傳聲軟管和一個(gè)堵塞檢測(cè)單元。其中,傳感器板采用耐用材料,如不銹鋼,用于承受種子撞擊并將聲音傳遞到腔室;聲音腔室由塑料制成,用于將聲音引導(dǎo)向傳聲軟管;傳聲軟管使用柔性材料制成,如橡膠,用于將聲音傳輸?shù)蕉氯麢z測(cè)節(jié)點(diǎn);堵塞檢測(cè)節(jié)點(diǎn)包含一個(gè)微型麥克風(fēng)和聲音處理器,用于接收和處理聲音信號(hào)。2017年,該公司展出的一款Recon無(wú)線堵漏和流量監(jiān)測(cè)系統(tǒng)便是基于聲電傳感器開發(fā)的,ECU采集到聲音以后通過(guò)WiFi傳輸?shù)今{駛室的車載終端上,車載終端向機(jī)手展示每一個(gè)通道的流量百分比。并且能夠以圖形化的形式顯示播種狀態(tài),當(dāng)終端上的種子通道顯示為紅色時(shí)表示發(fā)生了堵塞,顯示橘色時(shí)表示流量超出了設(shè)定值的范圍[34]。

圖3 Recon傳感器Fig. 3 Recon sensor
目前,國(guó)內(nèi)未見聲電傳感器用于播種堵漏或流量檢測(cè)的相關(guān)研究。
1.2.3 壓電傳感器
目前的壓電式傳感器多用來(lái)檢測(cè)種子管路是否發(fā)生堵塞,也有用來(lái)檢測(cè)播種流量的研究和應(yīng)用。某公司采用壓電薄膜設(shè)計(jì)了一款堵漏檢測(cè)傳感器,傳感器的管壁向內(nèi)凸起形成一個(gè)斜面,壓電薄膜粘貼在管壁斜面上,種子通過(guò)傳感器時(shí)撞擊斜面產(chǎn)生信號(hào)。Hoberge等[35]根據(jù)壓電效應(yīng)設(shè)計(jì)了一款壓電式的種子計(jì)數(shù)傳感器,包括分配頭傳感器和輸種管傳感器,為了能夠計(jì)數(shù)多粒種子同時(shí)撞擊傳感器,一個(gè)傳感器陣列覆蓋整個(gè)種子撞擊區(qū)域,所以種子實(shí)際上撞擊的是不同的傳感器單元;微控制器通過(guò)異步中斷的方式監(jiān)測(cè)不同傳感器單元的脈沖響應(yīng)。
此外,還有機(jī)器視覺(jué)法、電容檢測(cè)法廣泛用于含水率、液位及料位等的檢測(cè)。排種性能檢測(cè)傳感器的優(yōu)缺點(diǎn)如表1所示。
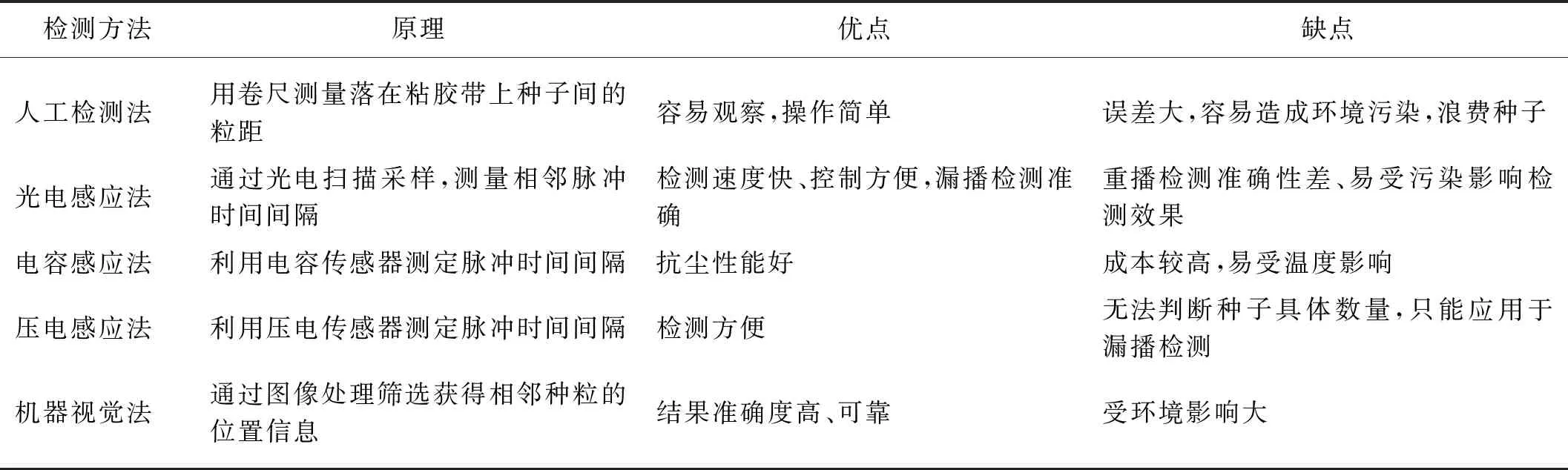
表1 排種性能檢測(cè)傳感器的優(yōu)缺點(diǎn)Tab. 1 Characteristics of sensor for seed metering detection
目前,光電感應(yīng)法因其成本低廉、系統(tǒng)穩(wěn)定,是當(dāng)前應(yīng)用最為廣泛的檢測(cè)方法。但由于農(nóng)田環(huán)境復(fù)雜,電容感應(yīng)法和機(jī)器視覺(jué)法的研究越來(lái)越多,仍需進(jìn)一步提高田間試驗(yàn)的可靠性和穩(wěn)定性。
1.3 播深檢測(cè)
目前,播深檢測(cè)傳感器包括測(cè)距傳感器、角度傳感器、直線位置傳感器和壓力傳感器等。國(guó)外測(cè)量耕深時(shí)往往是多個(gè)傳感器結(jié)合在一起使用,通過(guò)測(cè)量多個(gè)物理量綜合得出播深。Lee等[36]采用傾角傳感器測(cè)量拖拉機(jī)姿態(tài)變化,角度傳感器測(cè)量懸掛位置,近紅外傳感器測(cè)量傳感器與地表的高度,綜合3個(gè)傳感器的數(shù)據(jù)計(jì)算播深。Nielsen等[37]開發(fā)的播深測(cè)量系統(tǒng)由直線位移傳感器與超聲波傳感器組成,分別測(cè)量播種單體相對(duì)播種機(jī)機(jī)架的位置和機(jī)架相對(duì)地面的高度,綜合得出播深,試驗(yàn)誤差在3 mm以內(nèi)。國(guó)內(nèi)黃冬巖等[38]將壓電薄膜安裝在限深輪胎面內(nèi)側(cè),通過(guò)測(cè)量胎面形變監(jiān)測(cè)下壓力變化,進(jìn)而得知播深變化。蔡國(guó)華等[39]將超聲波傳感器安裝在開溝器上,通過(guò)直接測(cè)量傳感器與地面的高度來(lái)確定播深,靜態(tài)響應(yīng)誤差在10 mm內(nèi)。
美國(guó)某公司在漢諾威展出的SmartDepth可以根據(jù)土壤特性(如土壤濕度)自動(dòng)精確控制單粒種子的播種深度,如圖4所示。

圖4 SmartDepth排種控制器Fig. 4 SmartDepth seed metering controller
將SmartDepth與SmartFirmer配對(duì)使用,駕駛員自定義播種要求(深度范圍和濕度目標(biāo)),播種過(guò)程中,SmartFirmer實(shí)時(shí)測(cè)量并讀取不同深度的各種濕度水平。同時(shí),播種機(jī)使用電動(dòng)執(zhí)行機(jī)構(gòu),在保持土壤濕度目標(biāo)的同時(shí),在設(shè)定的深度范圍內(nèi)自動(dòng)調(diào)整播種深度。該系統(tǒng)根據(jù)水分將種子自動(dòng)放置在濕度適宜的深度,確保均勻的種子發(fā)芽和作物生長(zhǎng)。
2 播種控制技術(shù)
2.1 風(fēng)機(jī)速度控制
依據(jù)種子類型和重量、播種量、作業(yè)幅寬、作業(yè)速度的不同,具體的風(fēng)扇速度要在田間通過(guò)測(cè)試來(lái)決定。氣流過(guò)高會(huì)把種子吹出種溝,太低則種子會(huì)留在管內(nèi)造成堵塞,由于高的風(fēng)量能保證連續(xù)作業(yè)精度,所以在滿足要求的情況下,風(fēng)機(jī)速度應(yīng)盡可能設(shè)置高。
國(guó)外的氣流輸送式播種機(jī)大多采用液壓馬達(dá)驅(qū)動(dòng),直接與拖拉機(jī)液壓系統(tǒng)相連,通過(guò)流量閥控制流過(guò)液壓馬達(dá)的流量進(jìn)行調(diào)速。如Pronto DC系列播種機(jī)上的調(diào)速裝置和AirPower 2裝置,如圖5所示。

(a) Horsch的風(fēng)機(jī)

(b) AirPower
為了適應(yīng)高速作業(yè),AirPower 2裝置采用了兩個(gè)獨(dú)立的大容量風(fēng)機(jī)。目前國(guó)內(nèi)外針對(duì)風(fēng)機(jī)的性能及結(jié)構(gòu)的研究越來(lái)越多,學(xué)者們研究了仿真軟件對(duì)風(fēng)機(jī)結(jié)構(gòu)和性能的影響,并進(jìn)行了相關(guān)試驗(yàn)研究,2017年王欽明[40]利用FLUENT軟件對(duì)茶葉分選機(jī)進(jìn)行流場(chǎng)分析并進(jìn)行結(jié)構(gòu)設(shè)計(jì),得到茶葉顆粒的運(yùn)動(dòng)軌跡和影響因素。2018年戚冬達(dá)等[41]運(yùn)用ANSYS Workbench軟件分析了混流式風(fēng)機(jī)并進(jìn)行數(shù)值模擬,確定了風(fēng)機(jī)最佳結(jié)構(gòu)參數(shù)。姜華等[42]以采用CFD方法研究了旋風(fēng)機(jī)正反風(fēng)性能的影響因素。但對(duì)播種機(jī)風(fēng)機(jī)的研究未曾見到。
2.2 排種器驅(qū)動(dòng)控制
大田作業(yè)播種機(jī)的排種器驅(qū)動(dòng)方式主要包括地輪驅(qū)動(dòng)、液壓(或氣壓)馬達(dá)驅(qū)動(dòng)與電動(dòng)伺服驅(qū)動(dòng)。目前,電驅(qū)排種方式是國(guó)內(nèi)外研究的熱點(diǎn),歐美等國(guó)已廣泛應(yīng)用電驅(qū)排種器,國(guó)內(nèi)產(chǎn)品級(jí)電驅(qū)排種系統(tǒng)仍屬于起步階段。國(guó)外的氣流輸送式播種機(jī),如Horsch、Kuhn、Kubota和Pottinger等均采用電驅(qū)排種方式,電機(jī)經(jīng)減速機(jī)直接與排種軸連接,通過(guò)電機(jī)的速度調(diào)節(jié)實(shí)現(xiàn)排種量調(diào)節(jié),具有結(jié)構(gòu)簡(jiǎn)單、調(diào)速方便、易于實(shí)現(xiàn)自動(dòng)化、控制精度高、故障診斷方便等很多優(yōu)點(diǎn),如圖6所示。

圖6 Horsch的電驅(qū)排種裝置Fig. 6 Horsch’s electric drive seed-metering device
美國(guó)精密播種單體最新技術(shù)有vSet、DeltaForce、SmartFirmer、SmartDepth。vSet使用高真空設(shè)置和一個(gè)主動(dòng)式分離器(singulator),對(duì)不同形狀和大小的種子都能保證單粒。不需要更換排種盤、調(diào)節(jié)分離器(the singulator settings)以及調(diào)節(jié)真空強(qiáng)度。vSet中的平面圓盤與圓盤邊緣的分離器相結(jié)合,可以分離掉多余的種子。玉米和大豆的單粒精度超過(guò)99%,如圖7所示。

圖7 vSet排種器Fig. 7 vSet seed metering device
DeltaForce用液壓缸和一個(gè)向下的力傳感器來(lái)替代當(dāng)前播種機(jī)上的彈簧或安全氣囊,力傳感器可以測(cè)量出限深輪上的壓力,液壓缸使限深輪的壓力保持一致。DeltaForce能確保所有的種子都是在最佳的向下壓力下播種下去的,并保持一致的深度。利用DeltaForce,可以消除土壤壓實(shí)造成的隱性產(chǎn)量損失,每行都能保證在規(guī)定的深度播種,如圖8所示。

圖8 DeltaForce排種器Fig. 8 DeltaForce seed metering device
SmartFirmer是一種種子加固傳感器(a seed-firmer sensor),當(dāng)每顆種子被播種到溝底時(shí),傳感器就會(huì)測(cè)量溫度、濕度和犁溝里的殘留物,并在車載終端上顯示測(cè)量結(jié)果,可以了解種子所處的環(huán)境是否是良好狀態(tài)。種子發(fā)芽需要土壤中有足夠的水分。如果土壤沒(méi)有足夠的水分使種子發(fā)芽,就需要一場(chǎng)陣雨來(lái)獲得足夠的水分使種子發(fā)芽。SmartFirmer在駕駛室里測(cè)量和顯示土壤濕度,還可以實(shí)時(shí)顯示種植時(shí)的溫度。SmartFirmer可以識(shí)別出沿犁溝的任何不規(guī)則情況,比如土壤的土塊、空氣空間和從地表掉落的干土,這樣可以洞察到如何修正播種單元的性能并解決這些造成產(chǎn)量損失的問(wèn)題。壟作作物殘茬對(duì)種子萌發(fā)和生長(zhǎng)有不利影響,并能夠測(cè)量犁溝內(nèi)殘留的數(shù)量,并相應(yīng)地調(diào)整排凈器,從而確保殘茬不會(huì)限制種子吸濕或傳播疾病,如圖9所示。

圖9 SmartFirmer排種器Fig. 9 SmartFirmer seed metering device
2.3 播種深度控制
播深控制可以分為被動(dòng)和主動(dòng)控制技術(shù)。被動(dòng)控制技術(shù)利用限深輪對(duì)地面的仿形;主動(dòng)控制技術(shù)主要利用電液控制系統(tǒng)通過(guò)力調(diào)節(jié)、位置調(diào)節(jié)或力位綜合調(diào)節(jié)控制開溝器下壓力,具有控制簡(jiǎn)單、控制精度高、響應(yīng)速度快等優(yōu)點(diǎn)。國(guó)外高端播種機(jī)大多配備有液壓或氣壓下壓控制裝置[43],如圖10所示。
2.2.3 無(wú)菌消毒。痰液粘稠時(shí)可給與霧化吸入,霧化器在使用后立即清洗全套容器、管道、面罩,應(yīng)使用滅菌注射用水沖洗干凈并晾干;自來(lái)水中存在細(xì)菌容易造成霧化器內(nèi)細(xì)菌的滋生。呼吸機(jī)管路、濕化罐、細(xì)菌過(guò)濾器等應(yīng)定期更換,最長(zhǎng)不超過(guò)1個(gè)月(28天),防止細(xì)菌污染。合理使用抗生素,每周2次留取痰標(biāo)本送檢做培養(yǎng),根據(jù)痰培養(yǎng)結(jié)果,選用敏感藥效的抗生素。病室環(huán)境每日用紫外線燈照射30 min消毒2次,采用濕式清掃每日晨晚護(hù)理時(shí)各1次,配置1 000 mg/L含氯消毒液擦拭床、床旁桌,使用75%擦拭呼吸機(jī)屏幕及監(jiān)護(hù)儀屏幕。每日定時(shí)更換無(wú)菌吸痰罐,每天更換一次性負(fù)壓引流袋,定期更換密閉式吸痰管(3天更換1次)。
傳統(tǒng)的播深調(diào)整主要是為了實(shí)現(xiàn)播深一致性,而忽略了土壤條件的影響。研究表明:土壤濕度對(duì)播種深度有重要影響,合適的播深有助于獲得更好的水肥條件。目前已有學(xué)者對(duì)變播深播種進(jìn)行了相關(guān)研究。土壤濕度傳感器是播深控制系統(tǒng)的關(guān)鍵組件,F(xiàn)rederic Rene-Laforest等利用電容式土壤濕度傳感器來(lái)檢測(cè)土壤水分,使用LabVIEW開發(fā)了一個(gè)PI控制系統(tǒng)完成土壤水分與播深的線性映射,控制線性致動(dòng)器動(dòng)作實(shí)時(shí)調(diào)整深度,調(diào)整范圍為2.5~7.5 cm。John Fulton基于實(shí)時(shí)土壤濕度和結(jié)構(gòu)開發(fā)了能自動(dòng)調(diào)整深度的算法,土壤濕度由無(wú)線土壤濕度傳感器實(shí)時(shí)獲得,土壤結(jié)構(gòu)圖利用電導(dǎo)率儀可以直接得到。


(a) 液壓控制系統(tǒng)(b) AirForce裝置

(c) TruSetTM技術(shù)
國(guó)內(nèi)的溫麗萍等基于PLC結(jié)合PID控制開發(fā)了電液比例控制系統(tǒng)來(lái)控制播深,播種速度在5 km/h時(shí),動(dòng)態(tài)誤差在15~25 mm;趙金輝等[44]設(shè)計(jì)的播深控制系統(tǒng)采用了液壓缸調(diào)節(jié)四連桿仿形機(jī)構(gòu),通過(guò)PLC控制器和脈寬調(diào)制技術(shù)控制電磁閥流量,實(shí)現(xiàn)開溝深度實(shí)時(shí)控制,在5 km/h速度條件下實(shí)驗(yàn),響應(yīng)速度0.12 s,不同深度下的穩(wěn)定性系數(shù)均超過(guò)了90%。
2.4 播種量和播種行控制
由于氣流輸送式播種機(jī)一般采用的是集中排種系統(tǒng),直線行進(jìn)變量作業(yè)是容易實(shí)現(xiàn)的,而曲線行進(jìn)變量作業(yè)時(shí)想要實(shí)現(xiàn)各行的種植密度均勻就很難,因?yàn)樾枰獑为?dú)控制每一行的播種量,根據(jù)速度變化的變量播種在歐美等高端農(nóng)機(jī)上都能實(shí)現(xiàn)。基于處方圖變量作業(yè)難點(diǎn)在于獲取精準(zhǔn)的處方圖,國(guó)外的高端農(nóng)機(jī)上使用的終端很多具有執(zhí)行處方圖的能力,如expert 100終端,如圖11所示。
播種行控制裝置結(jié)構(gòu)主要可以分為兩種:一種是和氣流分配器做成一個(gè)整體,如IDS(Intelligent Distribution System)系統(tǒng),如圖12(a)所示,它可以通過(guò)總線系統(tǒng)控制所有播種行的開閉,在出種口有一個(gè)可以旋轉(zhuǎn)動(dòng)作的擋板,水平時(shí)允許種子通過(guò)弧形管進(jìn)入輸種管,當(dāng)立起時(shí)擋住出種口,種子通過(guò)漏斗裝置重新返回氣流分配器;另一種是單獨(dú)做成多通路閥,如TCS 32電動(dòng)閥,如圖12(b) 所示,它集成了光電對(duì)射管進(jìn)行播種量計(jì)數(shù),操作者能夠通過(guò)控制電動(dòng)馬達(dá)的轉(zhuǎn)動(dòng)來(lái)控制某行是否播種,禁止播種時(shí)種子通過(guò)另一條通路返回氣流分配器。

圖11 播種量控制Fig. 11 Seeding volume control

(a) IDS系統(tǒng)

(b) TCS 32電動(dòng)閥
如圖13(a)所示,TRACK-Guide III終端可實(shí)現(xiàn)播種機(jī)在池塘等大型障礙物周圍、地頭、邊界處進(jìn)行播種時(shí),自動(dòng)記錄下這些播種的區(qū)域,剩余的內(nèi)部區(qū)域以直線軌跡播種,當(dāng)行進(jìn)到已播種區(qū)域時(shí)自動(dòng)關(guān)閉某些行的播種[45],如圖13(b)所示;當(dāng)遇到田間樹木等小的障礙物時(shí),控制終端會(huì)提供一個(gè)曲線軌跡繞開障礙物的合理方案,如圖13(c)所示,該控制終端還可單獨(dú)控制排種器每一行的播種量,以保證種植密度均勻[46-47]。
需要說(shuō)明的是,由于集中排種器無(wú)法精準(zhǔn)控制每行播種量,涉及到曲線作業(yè)時(shí),不可避免地造成各行種植密度有一定的差異。

(a) TRACK-Guide III終端

(b) 池塘周圍播種的局部控制

(c) 繞開樹木
3 制約因素
氣流輸送式播種機(jī)是大型化播種機(jī)發(fā)展的必然趨勢(shì),傳感器技術(shù)、信息處理技術(shù)和智能化控制技術(shù)的飛速發(fā)展,有助于氣流輸送式播種機(jī)在我國(guó)推廣應(yīng)用,但通過(guò)以上測(cè)控技術(shù)的介紹,還存在一些制約因素,在今后的研究中需要重點(diǎn)解決。
1) 排種器性能。排種器結(jié)構(gòu)設(shè)計(jì)的合理性關(guān)系到播量的均勻性和播種質(zhì)量。氣流分配器是氣流輸送式播種機(jī)的關(guān)鍵部件,氣流種子混合體運(yùn)動(dòng)方向的改變,容易引起種子的機(jī)械損傷,從而影響種子的出芽率,如何保證各行的約束條件相同是個(gè)非常關(guān)鍵的問(wèn)題,也是減少堵塞和漏播的關(guān)鍵因素。
2) 動(dòng)力匹配性。國(guó)外的氣流輸送式播種機(jī)以大型為主,安裝有監(jiān)測(cè)系統(tǒng),自動(dòng)化程度較高,作業(yè)幅寬達(dá)到10 m以上,配套動(dòng)力一般在100 kW以上,由于我國(guó)國(guó)情的特殊性,配套動(dòng)力還不能很好地滿足大型機(jī)具的要求,因此推廣應(yīng)用起來(lái)較難。
3) 傳感器自主研發(fā)力度。傳感器是實(shí)現(xiàn)氣流輸送播種機(jī)種子流量在線檢測(cè),并且能夠?qū)崿F(xiàn)快速的漏播、堵塞檢測(cè)的有力工具,有助于提高作業(yè)質(zhì)量。精確的流量信息使用戶能夠了解種植密度分布、漏播指數(shù)、播種總量等信息,對(duì)后期精準(zhǔn)管理、產(chǎn)量預(yù)測(cè)等有重要意義。加強(qiáng)國(guó)產(chǎn)傳感器的研發(fā),發(fā)揮價(jià)格優(yōu)勢(shì),保證播種作業(yè)質(zhì)量的同時(shí),最大程度地降低國(guó)產(chǎn)產(chǎn)品的價(jià)格。
4 發(fā)展趨勢(shì)
大型、高速、高精度、智能化是播種機(jī)的發(fā)展方向。隨著現(xiàn)代農(nóng)業(yè)對(duì)播種作業(yè)要求的提高,氣流輸送式播種機(jī)將逐漸成為播種機(jī)的主要類型。為提升我國(guó)氣流輸送式播種機(jī)測(cè)控技術(shù)水平,今后應(yīng)著力發(fā)展以下技術(shù)。
1) 電驅(qū)動(dòng)排種技術(shù)。電驅(qū)排種技術(shù)極大地提高了播種的速度和精度,其易于調(diào)速和控制精度高的特點(diǎn)是開發(fā)實(shí)用高速高精度作業(yè)氣流輸送式播種機(jī)的保障。國(guó)外知名農(nóng)機(jī)企業(yè)已廣泛應(yīng)用電驅(qū)排種器,而國(guó)內(nèi)農(nóng)機(jī)企業(yè)仍然采用地輪驅(qū)動(dòng)方式為主,限制了播種速度和播種精度的提升。國(guó)內(nèi)學(xué)者針對(duì)電驅(qū)排種技術(shù)已經(jīng)進(jìn)行了大量的研究和實(shí)驗(yàn),在未來(lái)應(yīng)繼續(xù)加強(qiáng)研究和應(yīng)用推廣。
2) 播種流量檢測(cè)技術(shù)。歐美等發(fā)達(dá)國(guó)家的高端播種機(jī)上基本都配備了流量傳感器,而國(guó)內(nèi)的播種機(jī)一般并不配備流量或者堵漏傳感器。國(guó)內(nèi)關(guān)于堵漏和流量檢測(cè)技術(shù)的研究很多,但對(duì)氣流輸送式播種機(jī)的流量檢測(cè)技術(shù)研究很少,基本屬于空白。而且關(guān)于播種機(jī)流量檢測(cè)的精度和穩(wěn)定性還有待進(jìn)一步提高。
3) 智能控制技術(shù)。智能控制技術(shù)是一種通用性技術(shù),是各類農(nóng)業(yè)裝備實(shí)現(xiàn)智能化作業(yè)的共性關(guān)鍵技術(shù),也是國(guó)內(nèi)外研究的熱點(diǎn)。目前,國(guó)外高端播種機(jī)控制器已實(shí)現(xiàn)了變量作業(yè)控制,國(guó)內(nèi)在這些方面還有很大的差距。總體上來(lái)說(shuō),我國(guó)播種作業(yè)的智能化水平還很低,仍需作進(jìn)一步的研究以提高作業(yè)自主性。播種作業(yè)也會(huì)向精準(zhǔn)變量作業(yè)的方向發(fā)展,基于處方圖、土壤結(jié)構(gòu)圖與實(shí)時(shí)獲取的土壤濕度信息進(jìn)行變密度變深度播種。隨著農(nóng)業(yè)大數(shù)據(jù)的積累和相關(guān)人工智能技術(shù)的發(fā)展,獲取綜合各種因素的、高精度的處方圖將變得更加容易。隨著農(nóng)業(yè)經(jīng)營(yíng)模式的不斷變化,我國(guó)播種機(jī)正由小型向大中型、聯(lián)合作業(yè)方向發(fā)展。
猜你喜歡
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
 中國(guó)農(nóng)機(jī)化學(xué)報(bào)2021年2期
中國(guó)農(nóng)機(jī)化學(xué)報(bào)2021年2期
- 中國(guó)農(nóng)機(jī)化學(xué)報(bào)的其它文章
- 農(nóng)業(yè)機(jī)械化對(duì)廣西農(nóng)民增收貢獻(xiàn)率實(shí)證分析*
- 基于典范對(duì)應(yīng)分析的郴州市農(nóng)業(yè)機(jī)械化發(fā)展研究*
- 占補(bǔ)平衡項(xiàng)目對(duì)千陽(yáng)縣新增耕地等別和糧食產(chǎn)能的影響*
- 奶牛智能飼喂關(guān)鍵技術(shù)研究*
- 基于卷積神經(jīng)網(wǎng)絡(luò)的玉米病害識(shí)別方法研究*
- 基于深度相機(jī)的山地果園運(yùn)輸車避障系統(tǒng)設(shè)計(jì)*