航天器近程編隊自主協同相對導航方法
2021-03-31 02:51:48龔柏春郝明瑞管敘軍
宇航學報 2021年3期
關鍵詞:測量
龔柏春,王 沙,郝明瑞,管敘軍
(1.南京航空航天大學先進航天技術實驗室,南京 210016; 2.復雜系統控制與智能協同技術重點實驗室,北京 100074)
0 引 言
編隊航天器完成特定任務的前提是編隊構型的保持和重構控制,而編隊控制的前提是編隊成員的精密相對導航[1]。基于一定的動力學模型進行估計,采用航天器上的敏感器進行測量,最后使用EKF濾波算法或UKF濾波算法進行相對狀態的更新是目前導航算法的基本框架[2-3]。相對導航動力學模型、測量敏感器測量精度和導航算法一起影響著航天器相對導航的精度和可觀測性。
目前,常用的編隊航天器相對測量的敏感器主要有:相對GPS、微波雷達、激光雷達、可見光相機、紅外相機和激光測距儀等。但是GPS相對導航容易受環境干擾,另外當編隊成員距離太遠時缺少共同的可見星;無線電測距導航存在鏡像軌道的缺陷[4-5];基于光學相機測角的導航又存在相對軌道不可觀或可觀測性弱的問題,而且太空復雜的空間環境很影響相機的測量精度[6-9]。此外,還有“無線電+激光”組合的測量方式,利用無線電波束的全天空覆蓋特性,實現目標的定向,再引導激光信號完成距離測量。但是編隊飛行往往對測量設備和載荷的體積和大小有嚴格的限制,這要求使用盡可能少的測量裝置完成相對軌道的確定。
無線電僅測距、光學僅測角方式導航設備因為相對簡單、可靠性高,基于這兩種測量方式實現航天器編隊相對導航已經成為了領域內的發展趨勢,對此國內外學者也進行了大量的研究。Woffiden和Geller[10]提出了通過軌道機動來提高僅測角相對系統的可能性,但是頻繁的軌道機動會帶來航天器燃料的消耗。Gaias等[11]從相對軌道要素的角度研究了僅測角相對導航,得出了半長軸不可觀測的結論。Newman等[12]利用QV (Quadratic Volterra)級數建立二階非線性相對運動方程,由此在一定程度上解決僅測角相對導航的狀態可觀測性問題,但是計算復雜度較大。Chen和Xu等[13]采用雙星協同測量的策略,高學海和梁斌等[14]采用雙相機測量的策略,引入測量基線解決僅測角相對導航的可觀測性問題,但是雙相機策略增加了硬件成本。Wang等[15]通過在編隊飛行相對導航中引入一致性約束,解決了近圓軌道僅測距相對導航的不可觀測性,但是對于僅測角相對導航問題仍然存在相對軌道模糊性問題。
因此,本文將在采用一致性約束濾波的基礎上,提出一種利用測角相機偏離航天器質心安裝的桿臂效應來避免編隊飛行僅測角相對導航收斂于鏡像軌道的方法,該方法既不需要進行軌道機動輔助,也不需要承擔復雜動力學帶來的計算負擔,只依賴單個相機就能實現航天器近程編隊的相對導航。
1 相對運動模型
本文采用航天器軌道坐標系(LVLH),原點位于航天器質心O,x軸沿航天器軌道徑向方向ri由地心Oe指向航天器質心O,y軸在軌道平面內沿航天器的速度vi方向,z軸和x,y軸組成右手正交坐標系,與軌道平面的法線平行,如圖1所示。
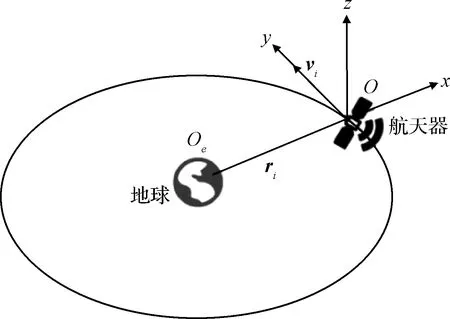
圖1 航天器軌道坐標系示意圖Fig.1 Illustration of spacecraft orbital coordinate system
假設航天器在近圓軌道上編隊、慣性飛行,編隊成員之間的相對軌道運動可以用知名的HCW (Hill-Clohessy-Wiltshire)動力學模型[16]描述:
(1)
(2)
(3)
(4)
(5)
式中:r=[x,y,z]T,v=[vx,vy,vz]T是LVLH系下的相對位置、相對速度的三軸分量,n是航天器的軌道角速度。
2 測量模型
如圖2所示,追蹤航天器上的相對測量敏感器即光學相機偏離質心安裝,假設相機在追蹤航天器本體系(依據慣性主軸定義)下的安裝位置矢量已知,為d=[dx,dy,dz]T。相機的輸出為在其相平面測量坐標系下目標航天器的單位視線矢量L。
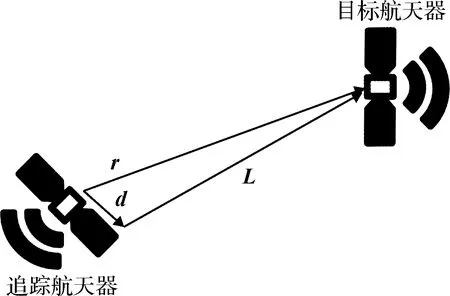
圖2 偏置相機測量示意圖Fig.2 Diagram of offset camera measurement
由于追蹤航天器的姿態可由慣導、星敏感器等設備測量獲得,相機在追蹤航天器本體系下的安裝姿態已知,那么可以將本體系的偏心安裝矢量和相機測量坐標系下的單位視線矢量投影到LVLH系下。為了簡化問題的描述,這里直接假設已經進行了投影,即d和L均是在LVLH系下的變量。
因此,基于LVLH系下的單位視線矢量L的定義可以建立相對導航的測量模型如下
(6)
式中:εr是服從高斯分布的零均值白噪聲。
3 一致性擴展卡爾曼濾波
考慮由多個航天器組成的編隊,每個航天器可以利用定向傳感器對其他航天器進行測量,并且利用無線電通信將其自己的估計結果發送到鄰近航天器。圖3是分散式傳感器和通信網絡應用于三個航天器的示例,航天器i對航天器j進行測量并估計航天器j相對于其自身軌道坐標系Li的位置xij和速度vij,即iXij=[xij;vij],左上標i表示在Li中表示向量Xij。
三個航天器的相對位置滿足幾何約束:
X12+X23+X31=0
(7)
然而,由于估計狀態在不同的坐標系中表示,因此需要將這些估計的狀態轉換到同一坐標系下:
1X12+J122X23+J133X31=0
(8)
式(8)中廣義旋轉矩陣Jij的定義如下:
(9)
Jij表示將航天器j的估計結果轉換到航天器i的軌道坐標系下,Rij表示從Lj到Li的旋轉矩陣,ωj表示Lj相對于慣性系的角速度在Lj中的表示。
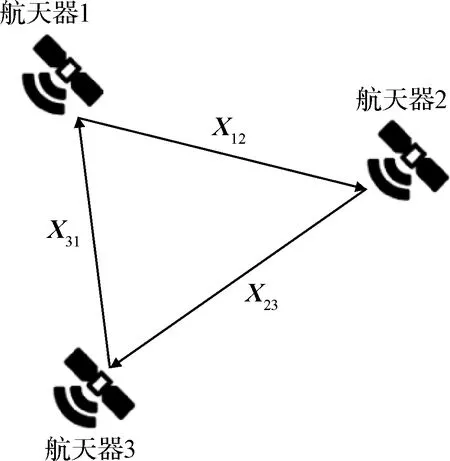
圖3 測量與通信拓撲圖Fig.3 Measurement and communication topology diagram
一致性擴展卡爾曼濾波算法[17](Consensus extended Kalman filter, CEKF)時間更新方程:
(10)
(11)
CEKF濾波算法狀態更新方程:
(12)
(13)
(14)

(15)
4 可觀測性分析
4.1 測量相機偏心安裝可觀測性分析
相機測量輸出采用式(6)視線矢量的形式:
(16)
在HCW模型下,由式(1)遞推得到
L(x0,y0,z0,vx 0,vy 0,vz 0)=
(17)
用[x′0,y′0,z′0,v′x 0,v′y 0,v′z 0]T表示EKF收斂軌道的狀態初值,收斂軌道與真實軌道在任意時刻得到相同測量值的等價條件是:
L(x0,y0,z0,vx 0,vy 0,vz 0)=ηL(x′0,y′0,z′0,v′x 0,v′y 0,v′z 0)
(18)
式中:η是大于0的常數。
下面分兩種情況討論相機偏置僅測角情形下EKF的收斂軌道。
1)當dz≠0時
比較等式(18)的第三行得到:
(19)
注意到cosnt,sinnt是線性無關并且隨時間變化的,而且dz≠0,那么收斂軌道為了在任意時刻都能得到與真實軌道相同的單位視線矢量,必須有:
η=1,z′0=z0,v′z 0=vz 0
(20)
同時比較等式(18)的第一行和第二行,可以得到如下關系:
(21)
(22)
比較式(21)和式(22)的常數項和關于cosnt,sinnt,nt的系數得到如下方程:
v′x 0=vx 0,y′0=y0,x′0=x0,v′y 0=vy 0
(23)
同時注意到式(20),此時EKF收斂軌道的初始相對參數和真實軌道的初始相對參數一致,即此時航天器不存在模糊軌道。
2)當dz=0時
通過式(18)的第三行得到:
z′0=ηz0,v′z 0=ηvz 0
(24)
同時比較式(18)的第一行和第二行,可以得到如下關系:
(25)
(26)
比較式(25)和式(26)的各項系數得到:
(27)
當dx≠0時,必須有η=1,結合式(24),得到:
(x′0,y′0,z′0,v′x 0,v′y 0,v′z 0)=(x0,y0,z0,vx 0,vy 0,vz 0)
此時,收斂軌道的初始相對參數和真實軌道的初始相對參數一致,航天器不存在模糊軌道。
當dx=0時,有:
(x′0,y′0,z′0,v′x 0,v′y 0,v′z 0)=(ηx0,ηy0+
(1-η)dy,ηz0,ηvx 0,ηvy 0,ηvz 0)
(28)
根據上面兩種情形的討論,僅測角EKF在不同的偏置情況下的收斂軌道總結如表1所示。
dx=dz=0是測角敏感器偏于質心安裝的特殊情況,濾波收斂軌道是(ηx0,ηy0,ηz0,ηvx 0,ηvy 0,ηvz 0),這與不考慮偏置情形下僅測角的可觀測性分析結果[18-19]是一致的。
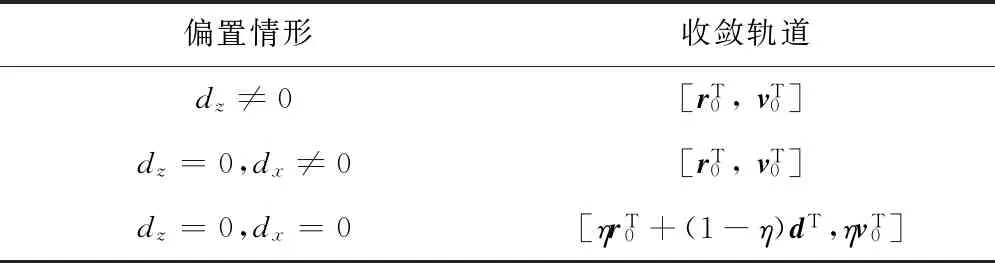
表1 不同偏置情形下濾波的收斂軌道Table 1 EKF convergent trajectories under different of fsetcases
4.2 一致性算法與相機偏置僅測角
盡管當dx,dz取不同值時,系統的可觀測性會有不同,但是總的來說,收斂軌道可以寫成這樣的形式:(αrT+(1-α)dT;αvT)。
設三個航天器的估計結果分別收斂于:
在一致性的約束下,三個航天器的收斂軌道應該滿足等式(8),展開后得到:
(29)
取等式(29)前三行分析:
αr1+(1-α)d1+R12(βr2+(1-β)d2)+
R13(γr3+(1-γ)d3)=0
(30)
注意到α=β=γ=1時表示的真實相對軌道也滿足上式:
r1+R12r2+R13r3=0
(31)
等式(30)和等式(31)相減得到:
(α-1)(r1-d1)+R12(β-1)(r2-d2)+
R13(γ-1)(r3-d3)=0
(32)
上式表明,只要r1-d1,R12(r2-d2),R13(r3-d3),即測量視線不共面,那么α=β=γ=1,三個航天器都收斂于真實的相對軌道。在r1+R12r2+R13r3=0的條件下,一般只要使d1,R12d2,R13d3線性不相關,就能滿足這個條件。
5 數值仿真
在MATLAB環境下建立仿真算法校驗所得結論,航天器參數設置如表2所示,濾波器參數設置如表3所示。HCW方程假設主航天器運行于近圓軌道,為此三個航天器的偏心率設置要足夠小。航天器在近地空間飛行,航天器與航天器之間的距離在2~8 km之間,仿真時不考慮J2和大氣阻力等攝動因素。測角相機的精度取為8.4×10-4rad,對應的角度為0.048°。測角相機的偏置量大小與航天器之間的距離相關,航天器之間的距離增加,測角相機的偏置量也要相應增加,對于10 km以內的航天器相對導航,測角相機的偏置量在5~10 m比較合適。一致性反饋系數為通過經驗調參獲得的較優值,在這里設置為0.03。
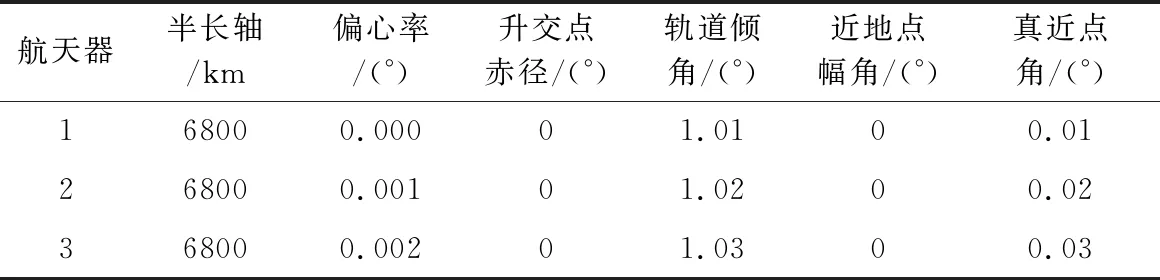
表2 航天器軌道根數設置Table 2 Spacecraft orbit parameters setting

表3 濾波器參數設置Table 3 Key parameters in consensus extended Kalman filter
為了驗證論文所提算法的有效性和測試性能,下面將進行兩組仿真:第一組對比了不同偏置情形下,EKF算法估計的相對運動軌道是否收斂,第二組對比了同樣偏置情形下CEKF算法和EKF算法的收斂性能。
1)測角相機偏心安裝EKF仿真結果
圖4、圖5、圖6分別表示不考慮偏置、添加x方向偏置和添加z方向偏置時卡爾曼濾波對航天器相對運動的三軸位置估計誤差。由仿真結果可知,不添加偏置的EKF相對狀態估計誤差不收斂,呈現周期變化,這就說明估計的相對軌道狀態收斂于模糊軌道。而添加x方向和z方向偏置的EKF估計誤差收斂到零附近,可見估計初始的相對軌道狀態收斂于真實的相對軌道。
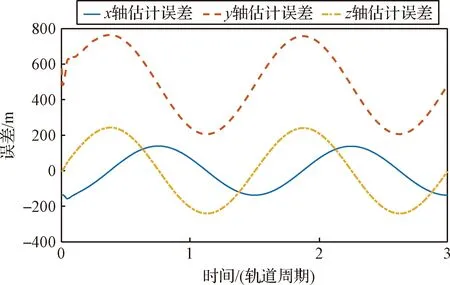
圖4 d=[0,0,0]T時EKF對X12三軸位置估計誤差Fig.4 EKF position error for X12 when d=[0,0,0]T
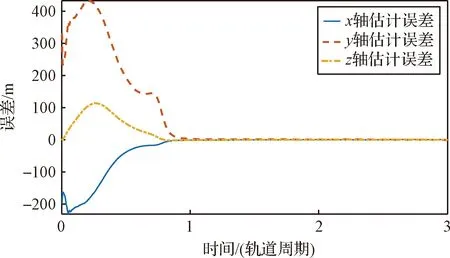
圖5 d=[5,0,0]TEKF對X12三軸位置估計誤差Fig.5 EKF position error for X12 when d=[5,0,0]T
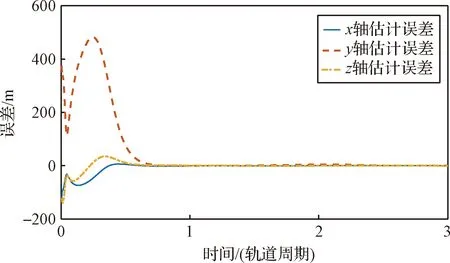
圖6 d=[0,0,5]T時EKF對X12三軸位置估計誤差Fig.6 EKF position error for X12 when d=[0,0,5]T
2)測角相機偏心安裝CEKF仿真結果
設三個航天器的相機偏置量分別是:
d1=[5,0,0]T,d2=[0,5,0]T,d3=[0,0,5]T
在這樣的相機偏置條件下,結合之前的可觀測性分析結果,可以預測:X23在EKF算法下收斂于模糊軌道,在CEKF算法下收斂于真實相對軌道。圖7表達了X23的真實相對運動軌道和兩種濾波算法估計的相對運動軌道,仿真結果和預測是一致的。EKF算法估計的相對運動軌道收斂于和真實相對運動軌道具有同樣形狀但是不同大小的模糊軌道,CEKF算法估計的相對運動軌道隨著時間的推移,逐漸收斂于真實相對運動軌道。
圖8和圖9表達了X23在EKF和CEKF濾波下的三軸位置估計誤差。
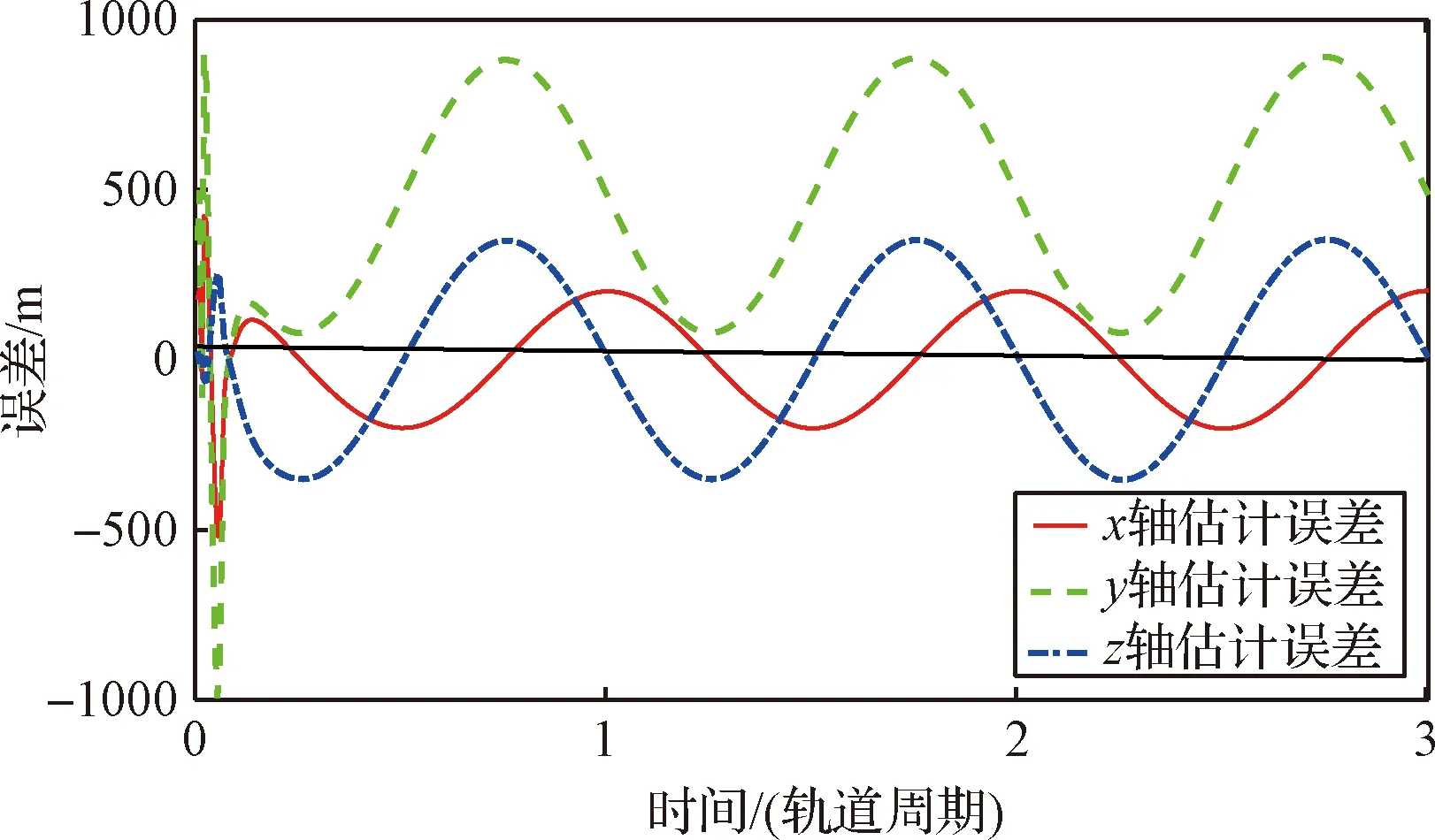
圖8 EKF濾波對X23的三軸位置估計誤差Fig.8 EKF position estimate error for X23
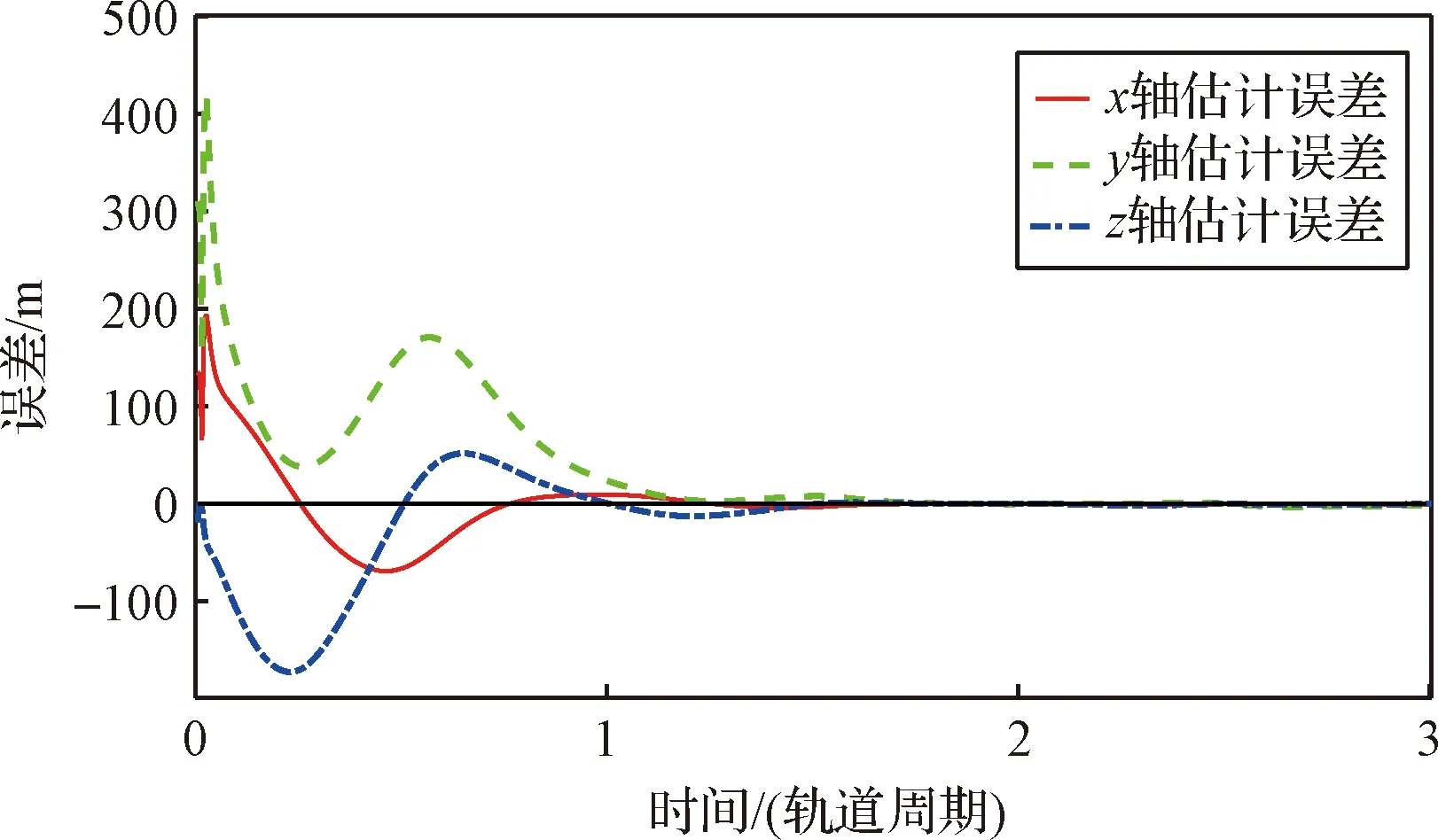
圖9 CEKF濾波對X23的三軸位置估計誤差Fig.9 CEKF position estimate error for X23
6 結 論
本文基于HCW動力學方程研究了測量敏感器偏于航天器質心安裝情況下EKF和CEKF的收斂情況,可觀測性分析和數值仿真結果表明:當測角相機偏置安裝時,偏置量在航天器軌道坐標系下x或z軸分量不為0時,能有效地避免EKF算法收斂于鏡像模糊軌道;此外,如果三個航天器相機的偏置量不共面,CEKF算法也能收斂于真實相對軌道。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00