同步電機重啟時編碼器識別錯誤的Matlab仿真分析
2021-04-02 14:42:41鄭穎慧
機電信息 2021年9期

摘要:基于Matlab仿真平臺搭建同步電機總結構及級聯控制系統結構,應用旋轉磁場控制概念,附加比例積分調節器對稱優化,采用增益控制和電流、電壓限位,最終顯示重啟時轉子漂移造成的各種角度偏差、轉向錯誤,對在實踐中合理糾偏以達成理想的平衡驅動控制有著良好的借鑒意義。
關鍵詞:Matlab模擬;坐標系轉換;聯級控制;編碼器;角度誤差
0? ? 引言
根據永磁同步電機運行原理,穩定運行時,定子和轉子磁勢相對靜止,產生固定方向的電磁轉矩。但同步電機本身無啟動轉矩,并且轉動慣量會導致漂移和電機重啟時編碼器位置識別錯誤。
為防止危險,嚴格禁止同步電機在重啟時反轉。于是,研究同步電機重啟時發生的現象,探討編碼器識別位置和其真實位置的偏差所產生的干擾,并在最短時間內排除這種識別錯誤,成為一個現實的課題。
1? ? 基于Matlab平臺搭建同步電機
1.1? ? 同步電機坐標轉換
用Matlab模擬構建同步電機,不可避免地要用到所有和PMSM相關的數學公式、坐標系轉換來模擬構建數學模型,PMSM涉及的坐標系轉換包括以下3個模塊。
(1)電壓坐標系轉換模塊:來自電網的三相正弦勵磁交流電a-b-c坐標轉換到α-β靜態坐標系(α與A相重合,β與α垂直,逆時針旋轉90°),靜止坐標系電壓再轉換到同步旋轉d-q坐標系。
(2)同步旋轉d-q坐標模塊:d軸為直軸,代表勵磁分量;q軸為交軸,代表力矩分量。d-q坐標建立在轉子上,與轉子一起旋轉。
(3)電流坐標系轉換模塊:由于轉子運動,d-q同步電機模塊在定子α-β靜態坐標系上產生感應電流,此電流最終轉變為電網的a-b-c三相交流電。
1.2? ? PMSM同步電機總結構圖
最終在Matlab平臺中搭建的同步電機總結構如圖1所示。除3個坐標系轉換模塊外,還包括:
(1)機械轉角產生模塊:轉子旋轉產生機械角。
(2)電子轉角測量模塊:機械角轉變成電角,具體位置由編碼器輸出,變換關系取決于轉子極對數。
2? ? 同步電機級聯控制
2.1? ? 同步電機級聯控制系統結構圖
同步電機的串級級聯控制系統由轉速比例積分控制器和電流比例積分控制器共同構成,三相繞組中的電流受控制影響,只在q軸產生構成旋轉力矩的電流,d軸電流通過控制保持為零。級聯控制作用于q軸,主控為角速度PI控制器,其輸出為電流PI控制器的輸入。反饋信號為同步電機編碼器輸出的角位置和轉速。電流PI控制器需要考慮施加濾波功能的幅值優化,轉速PI控制器需要考慮對稱優化,并加入增益控制和電壓限位的電流控制。
整個系統串級級聯控制結構圖包括轉速PI控制器、電流PI控制器、笛卡兒動靜雙坐標系轉換、交流三相和直流兩相坐標系轉換,方框圖如圖2所示。
2.2? ? 同步電機參數和控制系統參數設置
首先在Matlab上設置電機基本參數,直流母線電壓300 V,額定轉矩42.1 Nm,電機空轉轉速1 500 r/min。其他基本參數設置如表1所示,控制系統參數設置如表2所示。
2.3? ? 輸出角速度和角相位的編碼器模塊
同步電機及其控制系統按照上述參數搭建好后,驗證比較濾波前后、有無增益控制器、電壓限位的電流控制輸出量q軸電流和角速度的差別所在,以達到理想輸出波形。同時比較此模擬產生的驅動轉矩和理論計算結果的差異,誤差為0.2%,可以忽略,說明此同步電機控制模擬可靠。
添加輸出角速度和相位的編碼器模塊,其通常由三組線圈組成:兩個定子線圈分別對應轉子電壓相角0°和90°,一個轉子線圈介于定子線圈之間,對應轉子電壓相角45°。此編碼器可將輸出的機械角速度和角相位轉化成電子角速度和角相位,模擬出現的各種角相位識別誤差。
3? ? 編碼器不同誤差位置的重啟結果
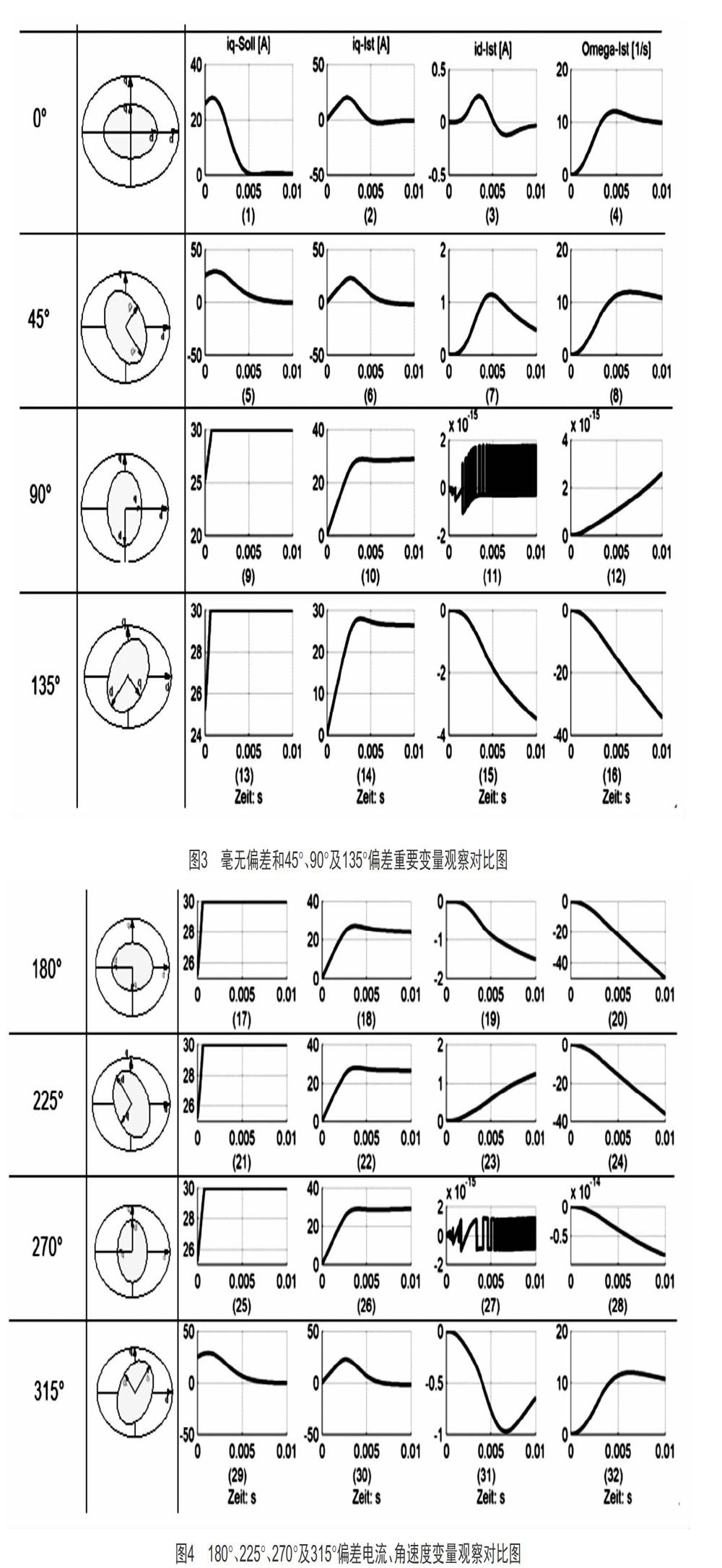
3.1? ? 毫無偏差的輸出結果
首先模擬毫無偏差的情況,即編碼器反饋角位置和真實位置沒有誤差,轉子的d-q坐標系統和編碼器測量得到的d-q軸完全一致,見圖3第一行0°偏差。在此僅展示重要模擬變量:q-d軸電流反饋值(輸出值Ist)、設置值(輸入值iq-Soll)、電機真實值的運行角速度Omega-Ist。
模擬過程中對角速度和最大電流限制值加以調整,得到理想運行角速度9 s-1和電流限位30 A,同時模擬輸出電機的機械角及其角速度、電角及其角速度。
結論:沒有偏差重啟時,電機很快平穩轉動,0.008 s內q軸電流變為零、0.014 s內d軸電流變為零。電機q軸電流輸入峰值27 A、真實峰值20 A,其q-d真實電流變量、角速度和位置變量與反饋值保持一致。
3.2? ? 45°角偏差的輸出結果
45°誤差,即編碼器反饋角位置和電機轉子的真實位置之間存在45°偏差,見圖3第二行45°偏差。同樣模擬相關q軸、d軸的電流變量以及機械角變量和電角變量。
模擬結果:45°偏差電機重啟時,q軸電流輸入最大值超過29 A,反饋值超過22 A,真實值低于18 A,波形變化情況和0°無誤差且相比類似,約0.018 s后變為零。d軸電流反饋波形和0°相比完全不一樣,電機真實d軸電流同樣約0.018 s后變為零。相位和角速度同時趨向平穩運行。
3.3? ? 90°角偏差的輸出結果
90°角偏差意味著編碼器反饋角位置和電機轉子的真實位置之間存在90°偏差,見圖3第三行90°偏差模擬變量。同樣模擬其他變量。
模擬結果:90°偏差電機重啟時,盡管電機中q軸和d軸的電流均達到極限值30 A,電機依舊處于靜止狀態,機械角位置及其角速度、電角位置及其角速度均為零,因此在q軸并沒有產生轉動力矩。
3.4? ? 135°角偏差的輸出結果
135°誤差,即編碼器反饋角位置和電機轉子的真實位置之間存在135°偏差。模擬相關q軸、d軸的電流變量以及機械角變量和電角變量。見圖3第四行135°偏差變量。
模擬結果:135°偏差電機重啟時,q軸電流輸入值達到極限值,但電機的q軸電流和反饋電流呈現完全相反的振蕩波形,由于PI控制器的電壓限位在0.06 s后變為零,同時由于q軸電流產生方向力矩的緣故,電機出現反轉現象。
3.5? ? 180°角偏差的輸出結果
180°角偏差,即編碼器反饋角位置和電機轉子的真實位置之間存在180°偏差。同樣模擬相關q軸、d軸的電流變量以及機械角和電角變量。見圖4第一行。
模擬結果:180°偏差電機重啟時,q軸電流輸入值達到極限值,但電機的q-d電流和反饋電流呈現完全相反的振蕩波形,由于PI控制器的電壓限位在0.06 s后變為零,同時由于q軸電流產生方向力矩的緣故,電機出現反轉現象。
3.6? ? 225°、270°、315°角偏差的輸出結果隨之模擬存在225°、270°、315°等其他角度偏差情況,模擬結果見圖4第二、三、四行。
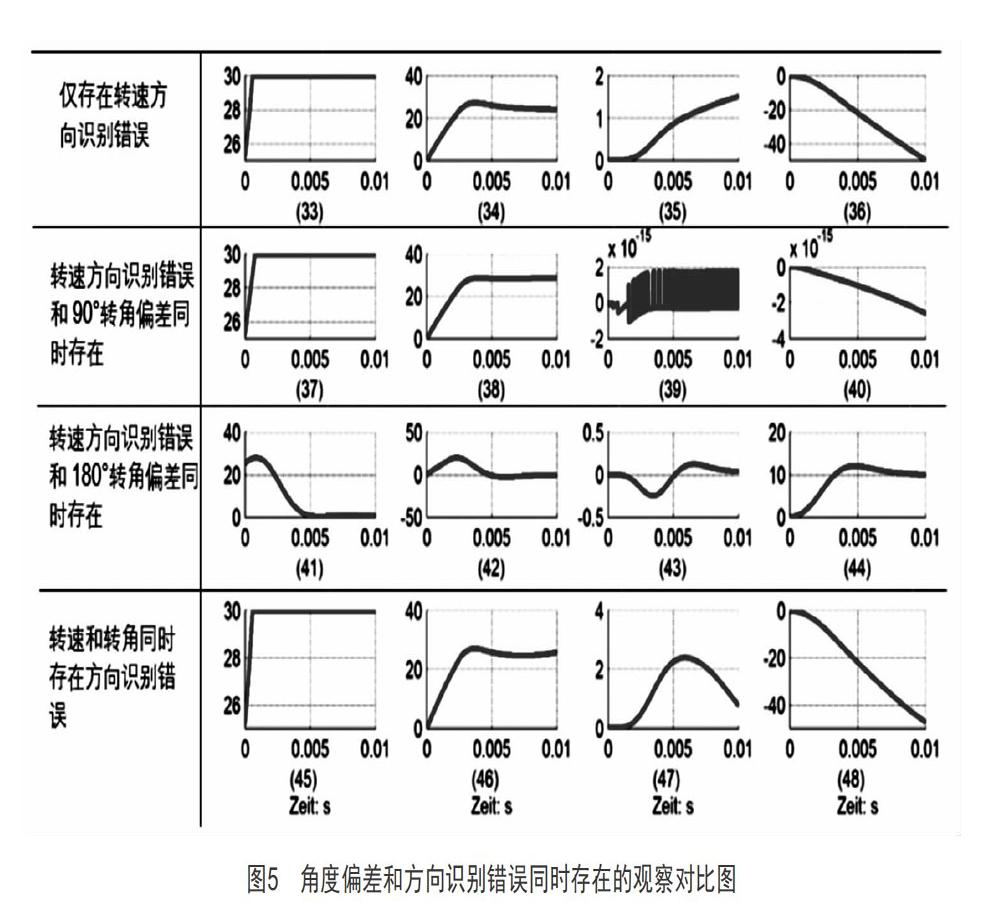
3.7? ? 角度偏差和方向識別偏差同時存在
最后仿真出現反方向識別的情況,即編碼器反饋的電機轉速方向或者角速度方向和真實方向相反。另外,在角度偏差和方向識別誤差同時存在的情況下,模擬相關變量運行軌跡,如圖5所示。
4? ? 結論
根據模擬結果得出以下3條重要結論:
(1)穩定運行:僅偏差角度存在于第一、二象限(-88°~88°),或者方向識別錯誤和偏差角誤差為180°同時存在,電機可以維持穩定運行。
(2)停止運行:偏差角度為90°和270°時,或者方向識別錯誤同時存在,電機停止運行。
(3)不穩定狀態:偏差角度在第三、四象限(90°~270°)或者存在方向識別錯誤,再或者兩種同時存在,電機漂移。
另外,根據此模擬結果,可在輸出端設置監控顯示,并在3 ms內按照顯示的情況對編碼器顯示的位置和方向進行糾偏。事實表明,基于Matlab平臺的此項研究具有良好的同步電機重啟研究工程實用價值。
[參考文獻]
[1] 韋鯤,金辛海.表面式永磁同步電機初始轉子位置估計技術[J].中國電機工程學報,2006,26(22):104-109.
[2] PIEPENBREIER B.Vorlesungsskript Elektrische Antrie-bstechnik Ⅱ[Z].Erlangen,2006.
[3] FLLINGER O.Regelungstechnik[Z].Berlin,1995.
[4] SCHRDER D.Eletrische Antriebe-Regelung von Antri-ebssystemen[M]. Berlin: Springer,2001.
[5] 劉慶飛.內置式永磁同步電機轉子初始位置檢測方法[J].電源學報,2017,15(1):132-137.
[6] DABNEY J B,HARMAN T L.The Student Edition of Simulink:Dynamic system Simulation for Matlab[M].New Jersy:Prentice Hall,1998
[7] 魯家棟,劉景林,衛麗超.永磁同步電機轉子初始位置檢測方法[J].電工技術學報,2015,30(7):105-111.
[8] LUTZ H,WENDT W.Taschenbuch der Regelungstechnik[M].Frankfurt:Deutsch,1998.
[9] PFAFF G.Regelung elektrischer Antriebe I[M].Mü nchen:Oldenbourg Wissenschaftsverlag,1991.
[10] FARSCHTSCHI A.Elektromaschinen in Theorie und Praxis[Z].Berlin,2001.
收稿日期:2021-01-17
作者簡介:鄭穎慧(1968—),女,河北人,碩士研究生,工程師,研究方向:電力傳輸系統、電機模擬和控制。
