一種分布式傳感器協同探測方法研究
2021-04-04 05:05:36趙慶璐賈朝文
航天電子對抗 2021年1期
關鍵詞:分配
趙慶璐,賈朝文
(電子信息控制重點實驗室,四川成都 610036)
0 引言
隨著戰場環境的日趨復雜,在未來信息化戰爭中,單傳感器已經無法滿足現代戰爭的需要,多傳感器協同可極大提升系統的探測能力,是未來信息化作戰的必然要求。從武器裝備發展規律來看,作戰系統網絡化是未來高新技術戰爭的特點,利用高度發達的信息網絡技術,將戰爭從“以傳感器為中心”轉化為“以網絡為中心”,通過傳感器組網實現多傳感器信息融合,為指揮員提供實時的戰場空間感知,代表了未來探測系統的發展趨勢[1-3]。
近年來,傳感器水平、計算機數字處理能力和網絡技術的不斷提高,為傳感器組網系統的實現提供了可能。同時,為充分發揮傳感器組網系統的探測能力,需構建與之匹配的協同探測網絡,本文提出了一種“去中心化”的分布式協同探測方法,通過構建基礎骨干網和協同應用網,實現傳感器的協同探測。
1 網絡構建
傳感器協同探測系統面臨多種戰術任務和非協作的目標環境,其組網能力直接影響系統在網絡信息作戰體系下的應用效能,若采用“中心化”的網絡管理方式,會引入“中心化”所固有的運算能力有限、處理效率低、中心節點異常等問題,無法滿足實時、高精度的目標探測需求。因此,本文構建了一個“無中心”的分布式傳感器協同探測網絡:網絡中的每個節點地位對等且以扁平式拓撲結構相互連通和交互;不存在任何中心化的特殊節點和層級結構;每個節點均承擔網絡路由、數據傳播、發現新節點等功能[4]。
1.1 基礎骨干網
在初始狀態下,按照“全域最近鄰”原則構建基礎骨干網絡:每個節點均與距離最近的節點建立點對點通信,當存在多個子網時,在不同的子網選擇距離最近的節點建立點對點通信,生成全域基礎骨干網,節點利用通信連接交互平臺的慣導、傳感器工作狀態、探測的目標等信息。
將基礎骨干網絡用G=(V,E)表示,各平臺對應集合V的網絡節點,節點間的通信鏈路對應集合E的邊,節點的最大通信距離為R,eij表示節點i與節點j間的通信連接,dij表示節點i與節點j間的距離,子網間的通信連接用集合U表示(U?E),則構建的基礎骨干網滿足約束:?eij∈E,dij≤dik≤R||eij∈U(k∈V)。如圖1所示,線型①∈E表示骨干網中的點對點通信連接,線型②表示可與新節點建立的潛在連接。
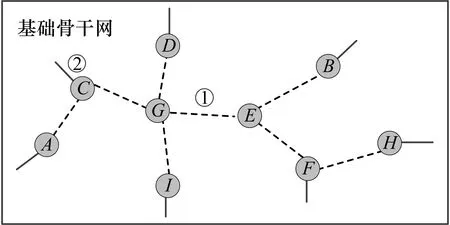
圖1 基礎骨干網
1.2 協同應用網
在建立的骨干網絡基礎上,基于協同探測任務,以最大化協同效能為準則在網內進行傳感器分配,并基于傳感器分配結果實時、動態地構建和調整應用網絡。如圖2所示,傳感器節點C、D和B、H分別執行不同的協同探測任務,節點C、H為建立在協同應用上的虛擬中心節點,同時為滿足協同任務需求新建立了①、②2條點對點的通信連接。
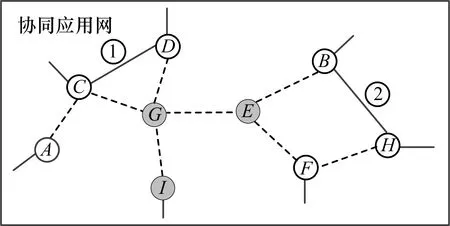
圖2 協同應用網
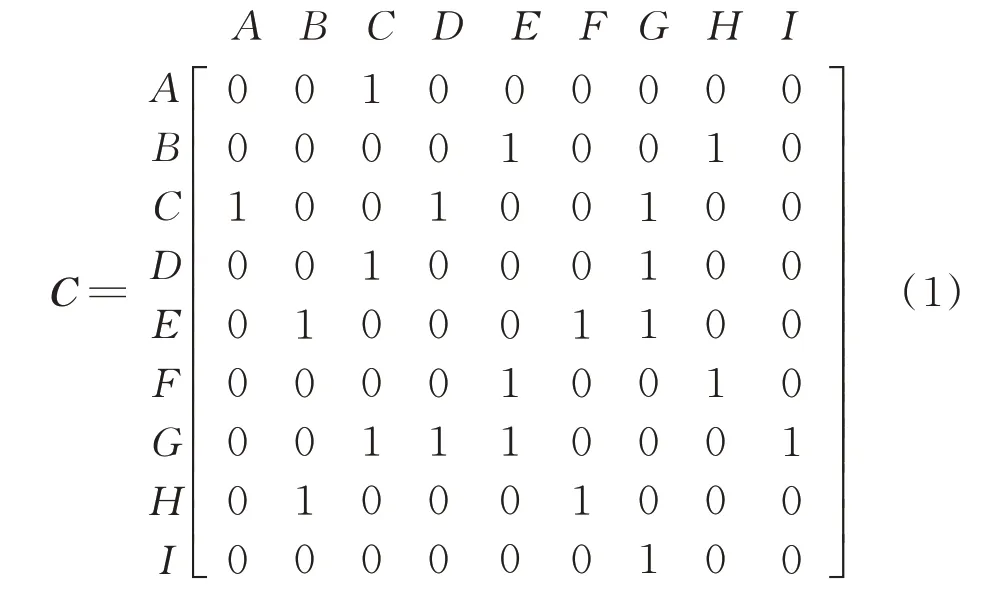
圖2所示的協同應用網絡生成的連接矩陣C如式(1)所示,矩陣中元素“1”表示對應的行列節點間建立了點對點的通信連接,“0”表示對應的行列節點間未建立點對點的通信連接。當前協同任務結束后,自動回歸至骨干網,等待下一個協同任務建立新的網絡拓撲。傳感器協同探測的需求會根據戰場電磁信號環境的變化而不斷調整,因此在不同時刻協同應用網絡的拓撲結構會發生變化。
2 傳感器分配
協同應用網的構建是基于傳感器分配的結果,即將目標分配給不同傳感器進行協同探測,并在對應的傳感器間建立點對點的通信連接。傳感器分配的準則為:利用網內某種傳感器組合使得對目標的探測效能最優。目標協同探測效能與傳感器能力(測向精度、探測距離、距離精度等)、目標與傳感器的相對位置關系、協同傳感器間距等因素相關[5-8],以無源協同探測為例,建立傳感器協同探測誤差模型,如式(2)所示。其中,傳感器的測向精度為σθ,傳感器間距離為L,θ1、θ2分別表示目標信號方向與基線(傳感器連線)間的夾角,β=θ2-θ1為目標與2傳感器形成的交會角,如圖3所示。

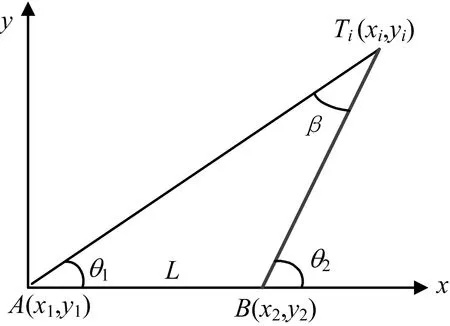
圖3 誤差模型示意圖
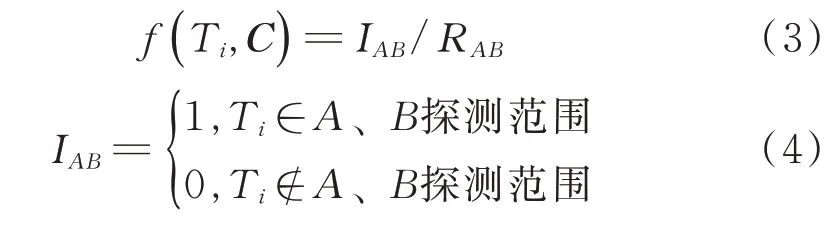
協同探測效能與探測誤差R成反比,若連接矩陣C選擇傳感器A、B對目標Ti進行協同探測,即在傳感器A、B間建立了點對點通信連接,則對目標Ti的探測效能如式(3)、式(4)所示:
當某個傳感器需執行多個協同探測任務,且受限于傳感器資源的約束,任務存在沖突時,協同探測效能的評估在原誤差模型的基礎上,增加對目標威脅等級的考量,效能評估模型如式(5)所示,m表示需協同探測的目標個數,ωi表示目標Ti的威脅等級。

3 算法描述
在上述分布式傳感器協同探測系統中,網內各傳感器地位平等,均可根據戰術需求、戰場環境的變化及本平臺的目標探測結果,在網內發起協同探測任務。在復雜戰場環境下,受限于傳感器本身的資源限制,不同協同探測任務間存在沖突的風險。
為解決各節點間的任務層競爭問題,本文從利用傳感器對戰場目標進行協同探測這一實際應用出發,以最大化編隊協同探測效能為準則,在網內建立了“發起即信任、信任即響應”,“高威脅、先響應”的智能合約。該合約由事件驅動,運行在網內各節點上,各節點按照合約達成統一的認知,并在此基礎上實現本平臺的任務調度、傳感器資源控制、數據處理等功能,從而構建一個動態、有序、魯棒的協同探測系統。詳細處理流程如圖4所示。
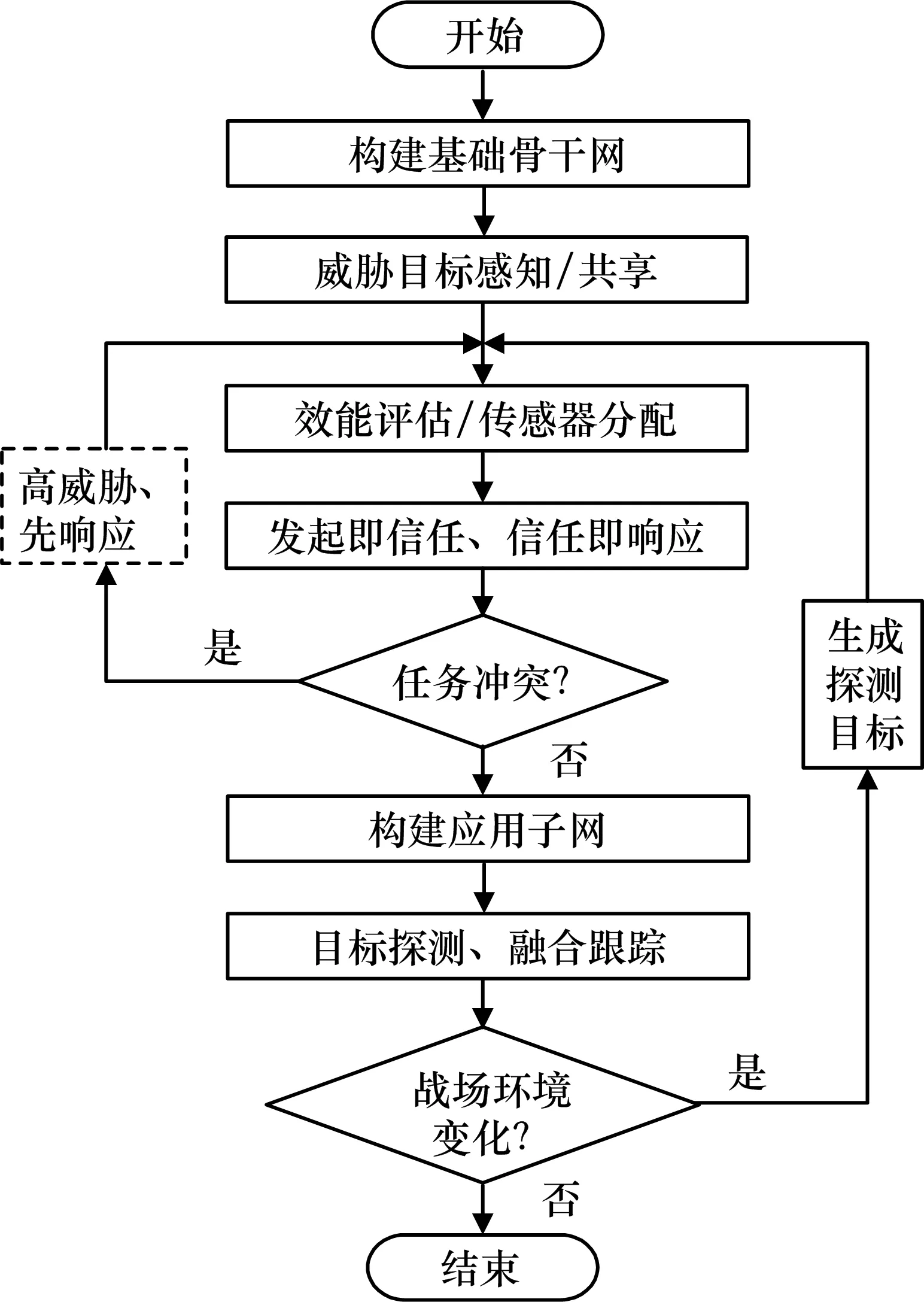
圖4 協同探測處理流程
流程描述如下:1) 各傳感器按1.1節所述構建協同探測基礎骨干網,并進行威脅目標感知與共享;2)基于威脅目標感知結果,人工或各傳感器自主選擇協同探測目標;3) 按第2節所述模型評估不同傳感器組合對目標進行協同探測的效能,并基于效能最大化準則向對應傳感器分配協同探測任務;4) 網內傳感器收到協同探測任務后,基于“發起即信任、信任即響應”的合約,判斷是否與當前正在執行的任務存在資源沖突;5) 若存在資源沖突,基于“高威脅、先響應”的合約,進行任務分配調整;6) 若不存在資源沖突,則構建協同應用網,進行傳感器資源實時調度和融合跟蹤;7) 當戰場環境發生變化,網內各傳感器可重新生成協同探測目標,分配協同探測任務并動態調整協同探測網絡。
4 仿真分析
采用Matlab對上述分布式傳感器協同探測系統進行仿真分析,網內節點的數量及相對位置關系按照1.1節所述,分布在東向20~100 km、北向0~40 km區域范圍內,各傳感器的位置分別為:A(25,10)、B(85,35)、C(35,25)、D(55,35)、E(70,20)、F(80,5)、G(53,20)、H(95,15)、I(55,5)。在東向0~120 km、北向80~180 km區域內模擬生成4個目標,目標位置分別為:目標1(10,100)、目標2(30,140)、目標3(60,170)、目標4(110,150)。假設各目標的威脅等級相當,各傳感器具備同時多目標的探測能力,按照第2節所述的傳感器分配模型進行仿真,傳感器目標分配結果如圖5所示,其中傳感器間的最大通信距離設置為50 km。

圖5 傳感器目標分配
各傳感器基于分配的協同探測任務實時構建協同應用網絡,建立點對點的通信連接,實現對目標的協同探測。設傳感器的測向精度為0.5°,目標1-4均為空中運動目標,Ma數為0.7,航向角分別為90°、135°、180°、225°。基于傳感器分配結果,對上述4個目標的協同探測性能進行仿真,時長為60 s,數據率為2 Hz,仿真結果如表1、圖6所示。由表1可知,效能評估值越大,對目標的探測誤差越小。
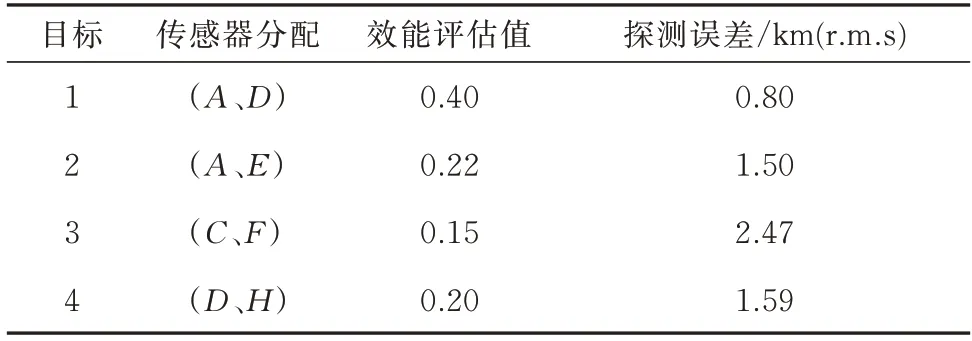
表1 協同探測效能仿真
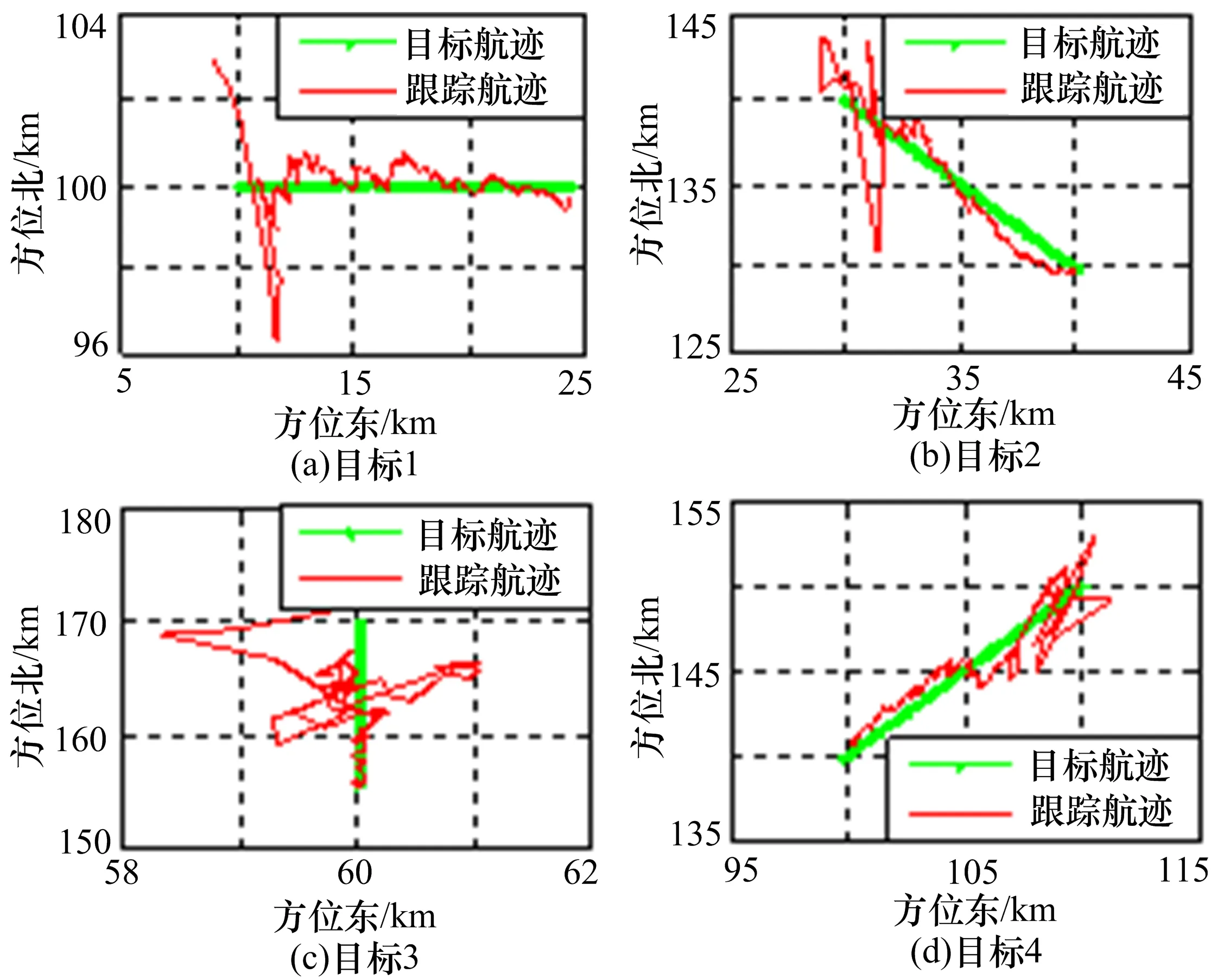
圖6 目標探測性能
5 結束語
本文提出了一種分布式傳感器協同探測方法:首先按照“全域最近鄰”原則構建基礎骨干網,然后基于最大化協同探測效能建立傳感器分配模型,并根據傳感器目標分配結果動態自適應地調整網絡拓撲,構建協同應用網,實現對目標的協同探測。場景模擬和仿真分析驗證了該方法的有效性、合理性。該方法可實現對目標實時、高精度的協同探測,且具有較好的魯棒性。同時,考慮到未來網內傳感器數量的不斷增多、類型更加多元,為達到更好的探測性能,在群體智能方面還需作進一步的研究。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40