基于無(wú)人機(jī)與Photoscan軟件的礦山地質(zhì)環(huán)境三維立體建模及應(yīng)用
2021-04-04 13:16:39李朋偉王雁林徐友寧
中國(guó)礦業(yè) 2021年9期
李朋偉,王雁林,2,徐友寧
(1.長(zhǎng)安大學(xué)地質(zhì)工程與測(cè)繪學(xué)院,陜西 西安 710054;2.陜西省自然資源廳,陜西 西安 710082;3.中國(guó)地質(zhì)調(diào)查局西安地質(zhì)調(diào)查中心,陜西 西安 710016)
“兩山”理論是習(xí)近平總書(shū)記提出的“綠水青山就是金山銀山”科學(xué)論斷的簡(jiǎn)稱(chēng)。“兩山”理論所昭示的人與自然、生態(tài)與經(jīng)濟(jì)的關(guān)系,為我們從生態(tài)文化角度重新審視生態(tài)文明建設(shè)提供了新視角。隨著“兩山”理論的推行和實(shí)踐,礦山地質(zhì)環(huán)境防治工作愈發(fā)重要。而在礦山地質(zhì)環(huán)境工作中,無(wú)人機(jī)的發(fā)展在技術(shù)層面具有十分重要的推動(dòng)作用。
近十年來(lái),小型無(wú)人機(jī)發(fā)展日新月異,國(guó)內(nèi)出現(xiàn)了大量的民用小型無(wú)人機(jī)公司,無(wú)人機(jī)產(chǎn)業(yè)踏上了快速發(fā)展軌道。小型無(wú)人機(jī)遙感技術(shù)因其成本低、操作靈活便利等優(yōu)點(diǎn),在地質(zhì)調(diào)查中的作用愈來(lái)愈重要[1]。無(wú)人機(jī)技術(shù)可以為礦山地質(zhì)工作提供豐富的數(shù)據(jù)資料,眾多工作者對(duì)無(wú)人機(jī)技術(shù)在礦山領(lǐng)域的應(yīng)用做了探索。趙星濤等[2]使用無(wú)人機(jī)低空航攝對(duì)礦山地質(zhì)災(zāi)害做了探測(cè)方法研究;周文生等[3]用無(wú)人機(jī)結(jié)合人工目視解譯的方式統(tǒng)計(jì)了寧東能源基地羊場(chǎng)灣煤礦的礦山地質(zhì)環(huán)境問(wèn)題分布特征;張永庭等[4]使用無(wú)人機(jī)機(jī)載Lidar技術(shù)對(duì)馬蓮臺(tái)煤礦進(jìn)行了采煤沉陷量監(jiān)測(cè),平均誤差0.043 4 m。
目前無(wú)人機(jī)的應(yīng)用已從二維影像階段進(jìn)入三維立體階段。基于無(wú)人機(jī)的三維建模軟件有很多,從運(yùn)算方式上區(qū)分主要有兩大類(lèi):第一類(lèi)為個(gè)人PC運(yùn)算軟件,如Smart3D、OpenDroneMap、Pix4Dmapper、Agisoft Photoscan、Datumate等;第二類(lèi)為云端運(yùn)算軟件,如Altizure、Skycatch、DroneDeploy等。部分工作者已采用無(wú)人機(jī)立體建模方法開(kāi)展了礦山地質(zhì)環(huán)境方面的探索。王耿明等[5]基于無(wú)人機(jī)和Smart3D軟件建立實(shí)景三維模型對(duì)新豐鐵帽頂鐵礦礦山地質(zhì)環(huán)境進(jìn)行了監(jiān)測(cè);張中雷等[6]使用無(wú)人機(jī)與Pix4Dmapper軟件對(duì)舟山露天采石礦山進(jìn)行了實(shí)景建模并對(duì)模型在生產(chǎn)調(diào)度中的應(yīng)用做了研究。王寧娜等[7]使用無(wú)人機(jī)與Smart3D軟件建立三維模型對(duì)廣西某稀土礦進(jìn)行了礦山地質(zhì)環(huán)境恢復(fù)治理評(píng)價(jià)。
相比于其他軟件一定的版權(quán)保護(hù)費(fèi)用、云端生成模型的速度受制于網(wǎng)絡(luò)帶寬等限制條件,Photoscan軟件可以在本地終端處理數(shù)據(jù)生成模型,且是半開(kāi)源的模型。Photoscan軟件基于影像自動(dòng)生成高質(zhì)量三維模型,無(wú)需設(shè)置初始值,無(wú)需相機(jī)檢校,它根據(jù)最新的多視圖三維重建技術(shù),可以對(duì)任意照片進(jìn)行處理,無(wú)需控制點(diǎn),也可以通過(guò)給予的控制點(diǎn)生成真實(shí)坐標(biāo)的三維模型。
NIETHAMMER等[8]曾使用無(wú)人機(jī)與Photoscan軟件來(lái)建立立體模型應(yīng)用于滑坡分析;繆盾等[9]應(yīng)用Photoscan軟件建立了亭子立體模型,并進(jìn)行了精度研究,驗(yàn)證了百幅以?xún)?nèi)的圖像建模誤差在1 cm以?xún)?nèi);李濤[10]進(jìn)行了Photoscan軟件地理建模的精度研究,經(jīng)剖析該模型可滿(mǎn)足1∶500復(fù)雜地形測(cè)量要求。目前,在礦山地質(zhì)環(huán)境領(lǐng)域尚無(wú)小型無(wú)人機(jī)與Photoscan軟件的三維建模與應(yīng)用的案例。
本文采用大疆小型四旋翼無(wú)人機(jī)與開(kāi)源版本的Photoscan軟件(1.4.3版本)結(jié)合的方法建立實(shí)景三維模型,調(diào)查并定量化研究了羊場(chǎng)灣一分礦南部約1 km2的礦山地質(zhì)環(huán)境問(wèn)題,最終分析并確立了此方法的可實(shí)行性、便捷性、低成本性等特點(diǎn)。該立體建模方法可為礦山地質(zhì)環(huán)境調(diào)查評(píng)價(jià)提供一種新的手段,豐富和發(fā)展礦山地質(zhì)環(huán)境調(diào)查評(píng)價(jià)手段。
1 研究區(qū)概況
寧東能源化工基地(以下簡(jiǎn)稱(chēng)“基地”)位于寧夏自治區(qū)的靈武市、鹽池縣等地,東西寬16~41 km,南北長(zhǎng)127 km,總面積約3 500 km2,由橫城礦區(qū)、韋州礦區(qū)、靈武礦區(qū)、鴛鴦湖礦區(qū)、馬家灘礦區(qū)、積家井礦區(qū)、萌城礦區(qū)、石溝驛井田組成,包括7個(gè)礦區(qū)、21個(gè)井田和1個(gè)獨(dú)立井田[11]。
基地北臨毛烏素沙地南緣,南接黃土丘陵北界,地貌主要由剝蝕殘山、黃土梁、坳谷洼地、半固定沙丘組成,大部分地區(qū)土地利用類(lèi)型為荒漠型草地。基地屬中溫帶干旱半荒漠氣候區(qū),干燥少雨、蒸發(fā)量大、水資源缺乏,水系多為季節(jié)性洪流沖溝。地表主要有西天河、邊溝、苦水河等河流,都表現(xiàn)出徑流量小且礦化度高的特征,無(wú)法有效利用。土壤類(lèi)型以淡灰鈣土和風(fēng)沙土為主,區(qū)域生物量低、植被恢復(fù)困難,多以草原帶沙生植被為主。
2000年后煤炭資源不斷加大開(kāi)發(fā)規(guī)模,各礦區(qū)均不同程度地出現(xiàn)了地裂縫、地面塌陷和煤矸石占?jí)和恋氐鹊V山地質(zhì)環(huán)境問(wèn)題,以及河道采砂、洗煤廠污染水土環(huán)境、地表植被退化、水土流失等生態(tài)環(huán)境問(wèn)題。持續(xù)開(kāi)發(fā)對(duì)土地利用類(lèi)型和植被類(lèi)型產(chǎn)生了明顯的影響[12]。調(diào)查羊場(chǎng)灣煤礦地下綜采導(dǎo)致的礦山地質(zhì)環(huán)境問(wèn)題,其一分礦南部約1 km2區(qū)域內(nèi)煤矸石山、地裂縫、地面沉陷等問(wèn)題較為突出,在成圖與立體模型上效果較為明顯,故選該區(qū)域作為方法試驗(yàn)區(qū)。
2 研究方法
2.1 無(wú)人機(jī)航拍照片獲取
首先,進(jìn)行實(shí)地踏勘與無(wú)人機(jī)追尋進(jìn)行定性定位調(diào)查,確定建模范圍。然后使用無(wú)人機(jī)獲取建模范圍實(shí)景影像,航拍時(shí)需要依次進(jìn)行航線規(guī)劃、地面控制點(diǎn)布設(shè)、選擇航飛模式等步驟,如圖1所示。

圖1 無(wú)人機(jī)航拍照片流程Fig.1 Process of UAV aerial photo
航線的規(guī)劃應(yīng)稍微超出研究區(qū)域范圍且具有較高的重疊度(超過(guò)70%),以確保數(shù)據(jù)獲取的完整性。地面控制點(diǎn)布設(shè)要盡量均勻而且確保坐標(biāo)精準(zhǔn)。檢查飛行質(zhì)量時(shí)注重影像的清晰度,篩除不利于成形的曝光、小角度的拍攝照片等(因拍攝角度使研究范圍面積占比小于三分之一),若素材不夠應(yīng)重新進(jìn)行航拍。攝取時(shí)充分覆蓋測(cè)區(qū)范圍,盡量攝取不同高度、遠(yuǎn)近的影像,并根據(jù)范圍大小選擇性布設(shè)地面控制點(diǎn)。本文使用的無(wú)人機(jī)為小型四旋翼無(wú)人機(jī)且應(yīng)具有GPS模塊。
2.2 實(shí)景三維模型建立
對(duì)攝取的數(shù)據(jù)采用Photoscan軟件處理建立模型。Photoscan軟件處理流程以無(wú)人機(jī)航拍數(shù)據(jù)環(huán)節(jié)作為起點(diǎn),在照片滿(mǎn)足應(yīng)用要求的前提下進(jìn)行排列計(jì)算對(duì)齊,照片對(duì)齊后生成密集點(diǎn)云,在點(diǎn)云的基礎(chǔ)上建立立體模型、DOM和DEM。Photoscan軟件的整個(gè)工作流程無(wú)論是影像定向還是三維模型重建過(guò)程都是高度自動(dòng)化的,十分便捷易于上手,其工作流程如圖2所示。對(duì)于已經(jīng)建立的實(shí)景立體模型、DEM和DOM,通過(guò)目視解譯和Photoscan軟件中的測(cè)量功能可以評(píng)價(jià)并定量化分析部分礦山地質(zhì)環(huán)境問(wèn)題。
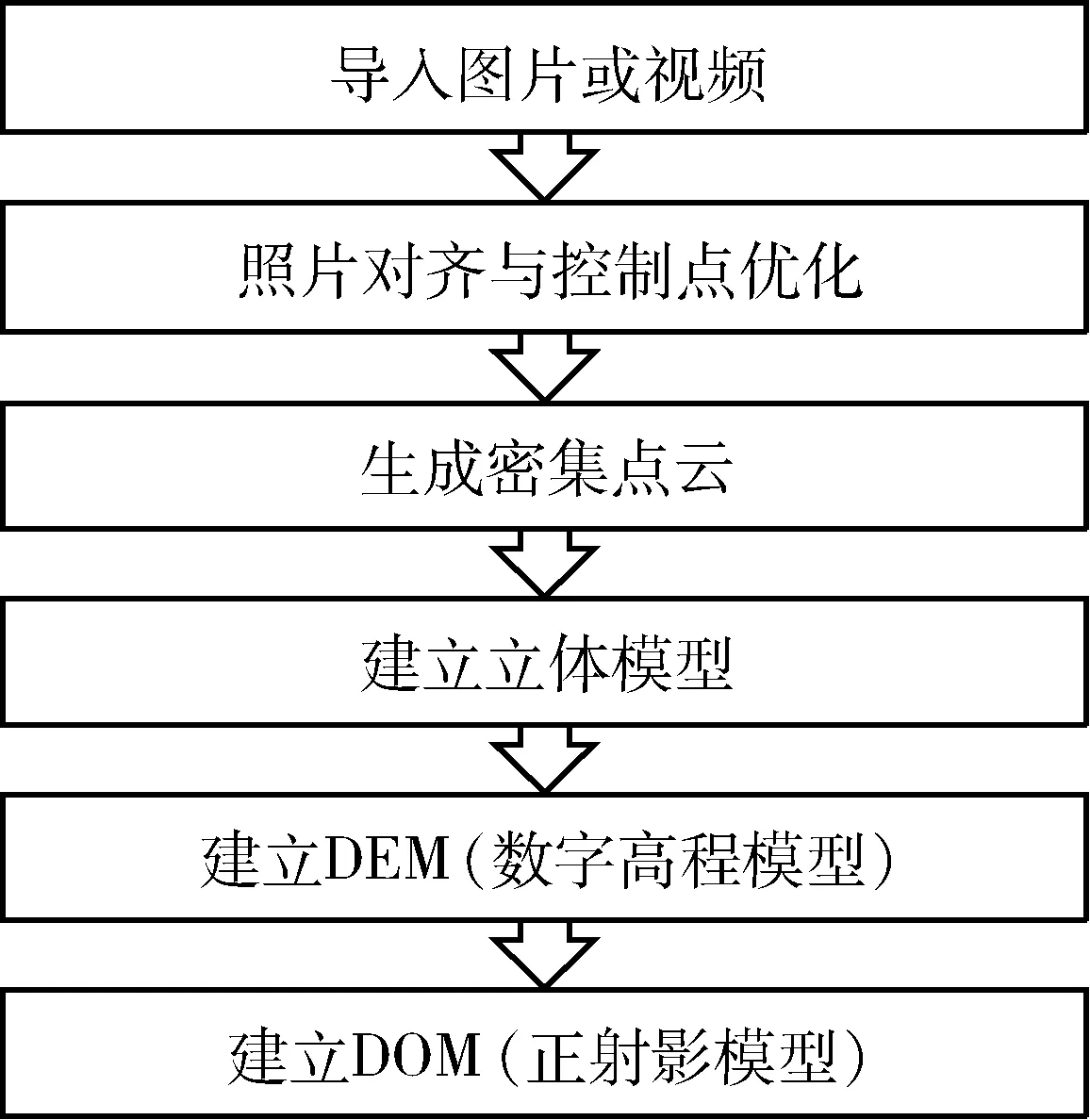
圖2 Photoscan軟件數(shù)據(jù)處理與模型建立流程圖Fig.2 Flowchart of data processing and model buildingof photoscan software
3 應(yīng)用案例
3.1 數(shù)據(jù)采集與處理
本次使用的無(wú)人機(jī)型號(hào)為大疆Phantom 4 Advanced,飛行器與相機(jī)模塊參數(shù)見(jiàn)表1。無(wú)人機(jī)航行路線重疊率80%,最大相對(duì)飛行高度300 m,航拍線路如圖3中帶箭頭虛線所示。無(wú)人機(jī)拍攝照片共373張圖片,通過(guò)篩選不利于建模的照片后留下353張照片,建立立體模型如圖4所示。 本次航拍用時(shí)近1 h,后期軟件建模耗時(shí)3 h,電腦主要配置可供參考:CPU i5-8600、內(nèi)存8 G、顯卡GTX1060 3 G。

圖3 航拍線路布設(shè)Fig.3 Layout of aerial circuit
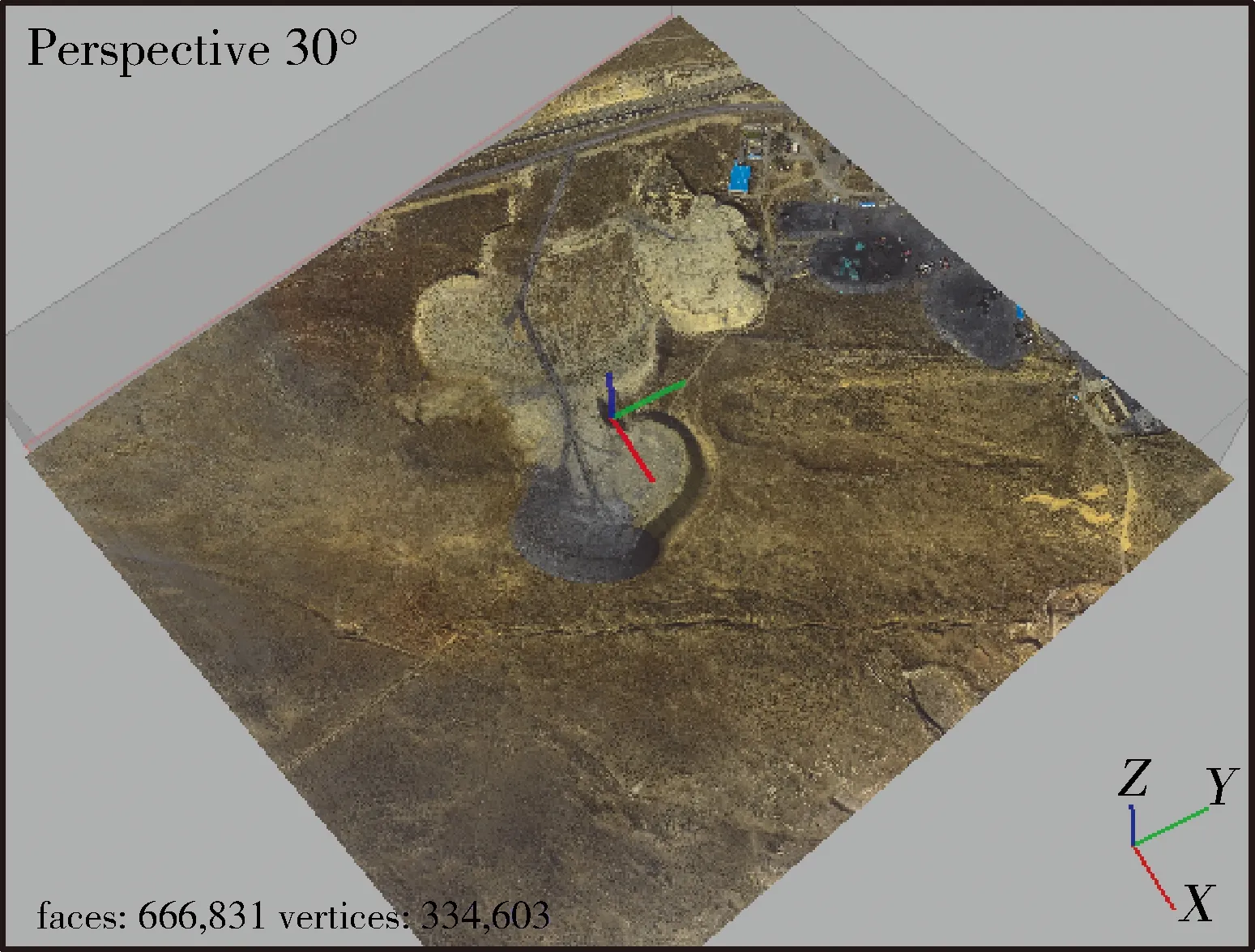
圖4 三維立體模型Fig.4 Three-dimensional model
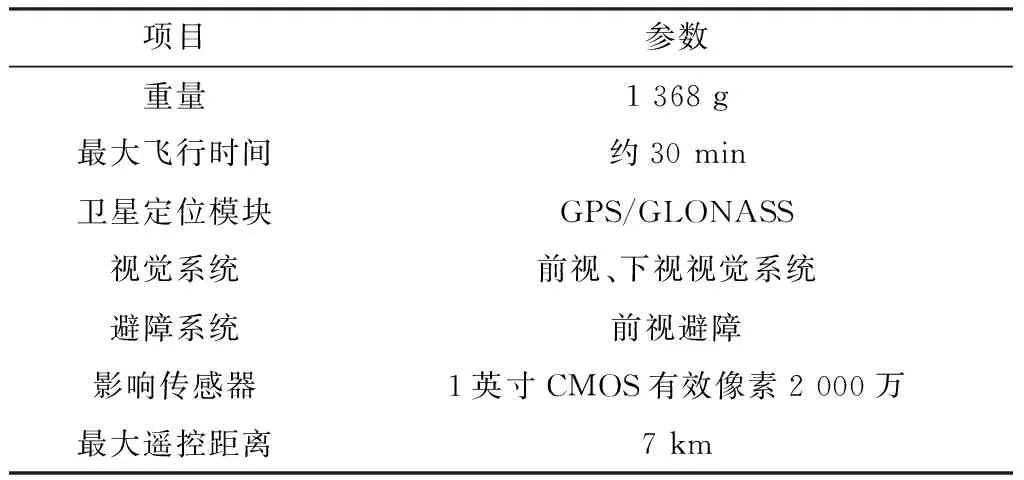
表1 大疆Phantom 4 Advanced無(wú)人機(jī)參數(shù)Table 1 Parameters of DJI Phantom 4 Advanced UAV
3.2 精度分析
根據(jù)地面顯著標(biāo)識(shí)物,區(qū)域內(nèi)控制點(diǎn)一共設(shè)立10個(gè)(其中4個(gè)為測(cè)量地裂縫并與模型測(cè)量作對(duì)比),校驗(yàn)點(diǎn)設(shè)立8個(gè)記為PX并提前記錄坐標(biāo)。照片對(duì)齊優(yōu)化后生成密集點(diǎn)云,根據(jù)點(diǎn)云與控制點(diǎn)成立立體模型后,取8個(gè)校驗(yàn)點(diǎn)的記錄坐標(biāo)與模型讀取坐標(biāo)進(jìn)行精度對(duì)比。
點(diǎn)誤差統(tǒng)計(jì)見(jiàn)表2,結(jié)果顯示校驗(yàn)點(diǎn)位平面中誤差為0.63 m,高程中誤差為0.15 m,誤差相比機(jī)載RTK和機(jī)載Lidar技術(shù)較大。點(diǎn)誤差相對(duì)穩(wěn)定,推測(cè)線誤差與面積誤差隨數(shù)值增大而減小。根據(jù)點(diǎn)位實(shí)測(cè)值和模型讀取值,分別取12條直線與三角形區(qū)域,按數(shù)值從小到大排列分別命名為L(zhǎng)X、SX統(tǒng)計(jì)相對(duì)誤差見(jiàn)圖5,可見(jiàn)相對(duì)誤差隨數(shù)值增大而減小的趨勢(shì)。其中最小線段L1長(zhǎng)198.62 m,相對(duì)誤差0.5%,最小區(qū)域S1面積2 867.54 m2,相對(duì)誤差0.9%。通過(guò)誤差分析可見(jiàn)該模型點(diǎn)精度較低,但長(zhǎng)度與面積的計(jì)算精度較高且相對(duì)誤差均小于1%,同時(shí)相對(duì)誤差隨數(shù)值增大而降低。
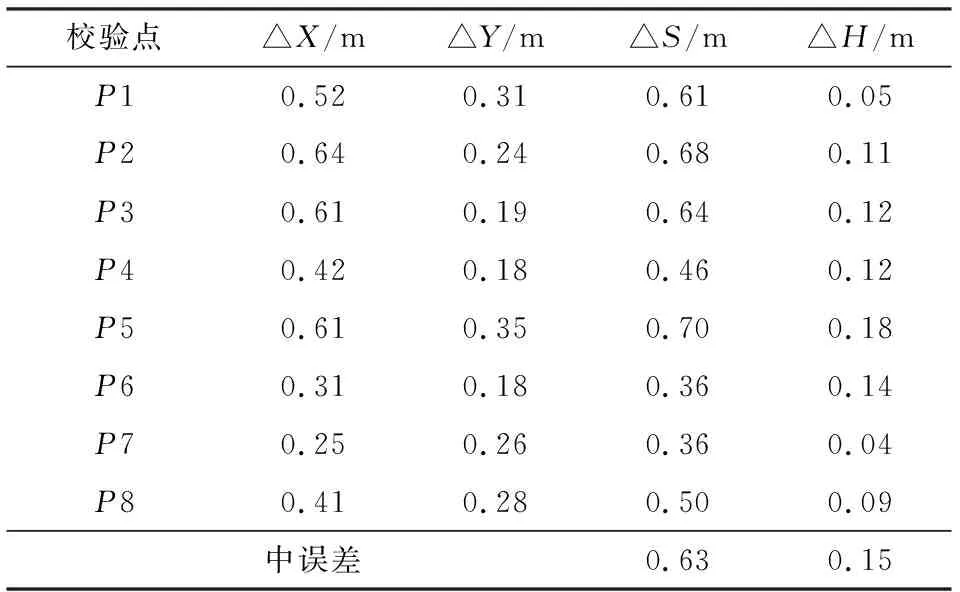
表2 校驗(yàn)點(diǎn)誤差Table 2 Checkpoint error
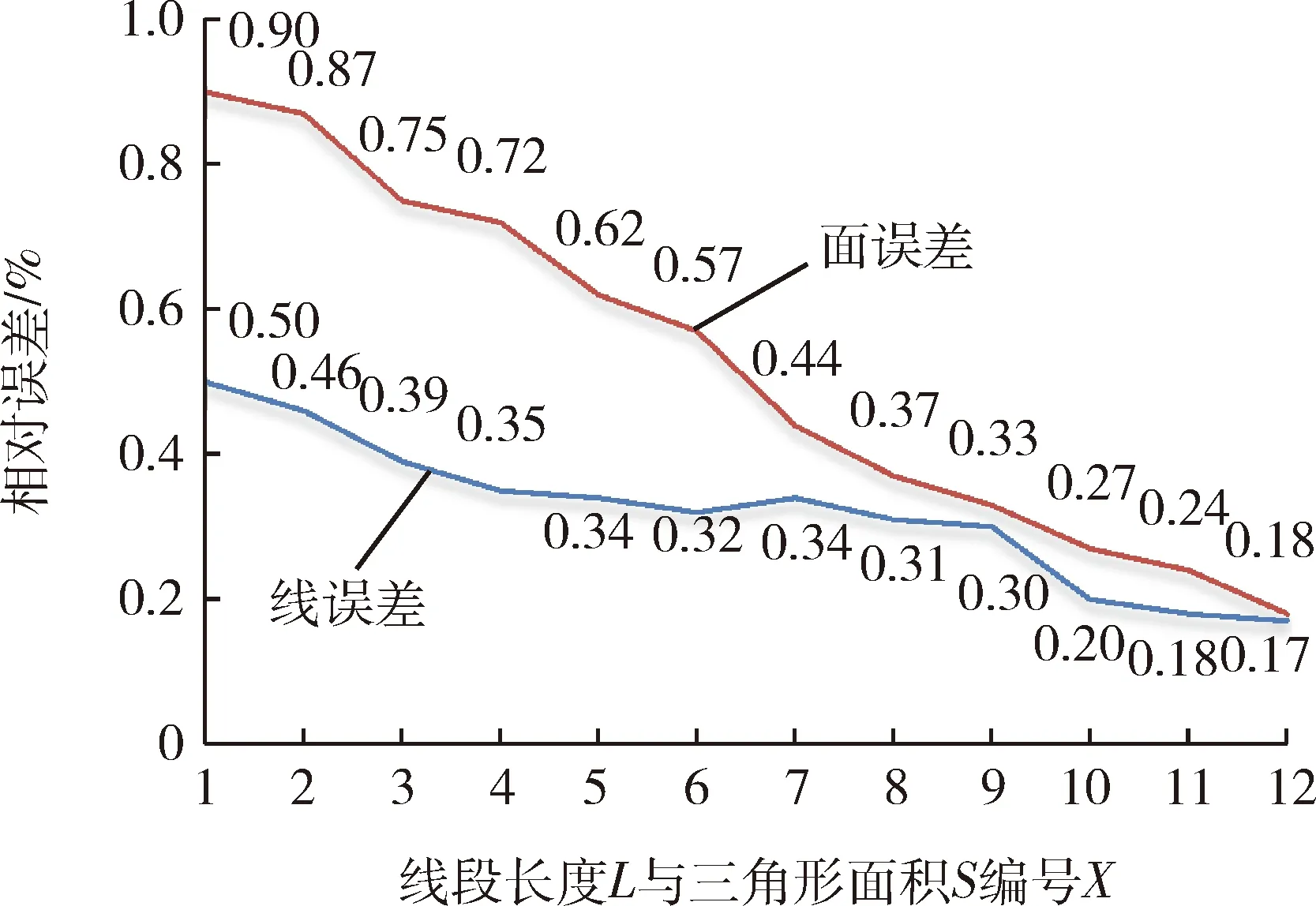
圖5 線段與面積相對(duì)誤差折線圖Fig.5 Lline chart of line and area relative error
3.3 礦山地質(zhì)環(huán)境問(wèn)題
煤炭資源的開(kāi)發(fā)利用過(guò)程中,通常伴隨著地質(zhì)災(zāi)害、水文條件變化、棄渣侵占土地等一系列的礦山地質(zhì)環(huán)境問(wèn)題。寧東能源化工基地近年來(lái)礦產(chǎn)資源生產(chǎn)活動(dòng)加大,地下綜合機(jī)械化采煤導(dǎo)致了大面積的礦山地質(zhì)環(huán)境問(wèn)題。選定的羊場(chǎng)灣煤礦研究區(qū)范圍內(nèi)礦山地質(zhì)環(huán)境問(wèn)題主要有地質(zhì)災(zāi)害(地裂縫、地面沉陷)和棄渣侵占土地,下面以無(wú)人機(jī)和Photoscan軟件建立的三維立體模型對(duì)研究區(qū)范圍內(nèi)的礦山地質(zhì)問(wèn)題進(jìn)行分析。
3.3.1 煤矸石堆場(chǎng)
煤矸石是煤炭開(kāi)采與加工過(guò)程中產(chǎn)生的固體廢棄物,其堆放不僅壓占大量土地,且易造成大氣、水、土壤等生態(tài)環(huán)境破壞[13]。羊場(chǎng)灣煤礦存在許多露天煤矸石堆場(chǎng),野外調(diào)查顯示均位于礦區(qū)附近,在研究區(qū)范圍內(nèi)亦發(fā)現(xiàn)有典型煤矸石堆場(chǎng)。利用建立的三維立體模型生成DOM如圖6所示,在DOM中可以清晰地觀察到研究區(qū)范圍內(nèi)的所有煤矸石堆場(chǎng)并在圖中圈定出來(lái)。
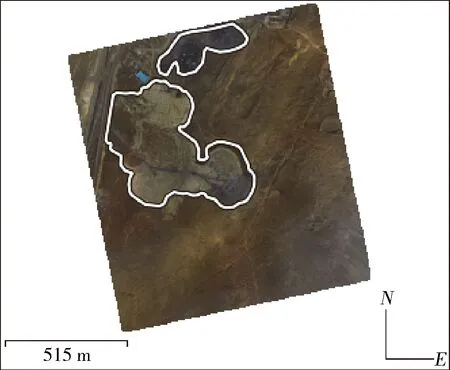
圖6 DOM中矸石堆范圍Fig.6 Range of vermiculite and slag heap in DOM
圈定范圍后可以直觀地觀察到煤矸石堆場(chǎng)對(duì)周邊環(huán)境影響與治理情況,然后利用Photoscan軟件的測(cè)量功能讀取煤矸石堆場(chǎng)的面積和體積。煤矸石堆場(chǎng)的治理通常有覆土、植被綠化等復(fù)墾手段,并經(jīng)常交叉運(yùn)用。可觀察出該煤矸石堆場(chǎng)緊靠公路且規(guī)模較大,侵占大量土地,周?chē)脖幌∩佟C喉肥褕?chǎng)較新,仍有部分運(yùn)矸車(chē)輛從西側(cè)進(jìn)入矸石場(chǎng)作業(yè),西部區(qū)域與中部區(qū)域已經(jīng)覆土,東南部分區(qū)域還在新堆積且矸石場(chǎng)整體植被覆蓋度低。模型截圖和測(cè)量(過(guò)程見(jiàn)圖7)得出壓占面積約0.23 km2,堆積體積約1.27×106m3。
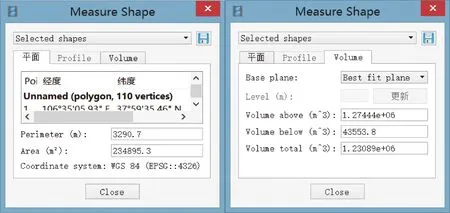
圖7 土地壓占面積、體積數(shù)據(jù)讀取Fig.7 Reading of land pressure area and volume data
3.3.2 地裂縫
地裂縫是礦產(chǎn)資源開(kāi)發(fā)過(guò)程中常伴生的地質(zhì)災(zāi)害,受自然條件與地下綜合機(jī)械化煤炭資源開(kāi)采影響,研究區(qū)產(chǎn)生一條明顯的地裂縫,為東北-西南向,呈直線形并在西南末端發(fā)生彎折。通過(guò)立體模型生成DOM后,可以顯著觀察到地裂縫的影響并測(cè)量其相關(guān)參數(shù)(圖8)。
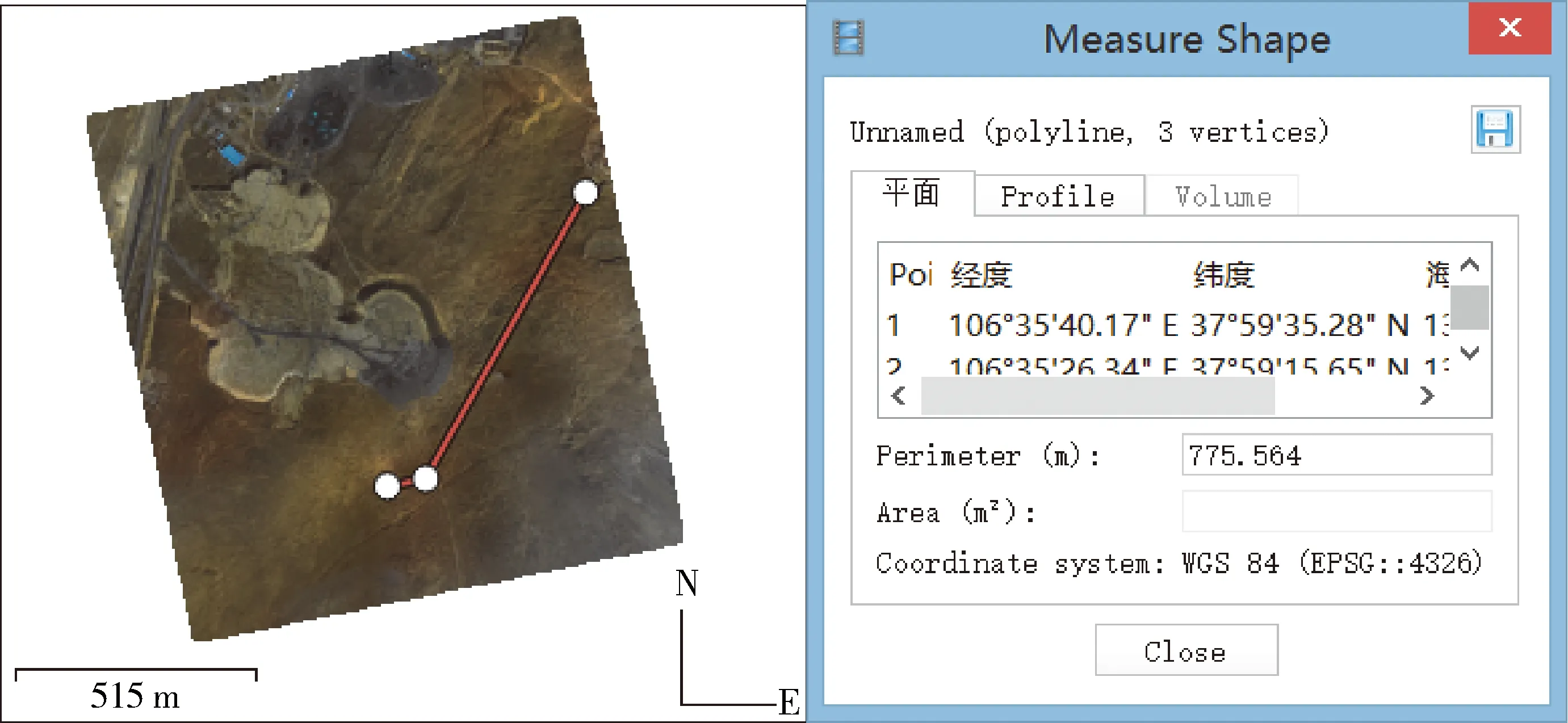
圖8 DOM中地裂縫測(cè)量Fig.8 Ground fissure measurement in DOM
在DOM模型中能觀察其全貌,該地裂縫形態(tài)極為突出,顏色較周?chē)睿伊芽p多有中斷,在DEM模型(圖9)中僅能看到隱約輪廓。 通過(guò)Photoscan軟件測(cè)量讀取該地裂縫的走向?yàn)?2°、長(zhǎng)度775.564 m,最大寬度為2.7 m。根據(jù)7號(hào)控制點(diǎn)、8號(hào)控制點(diǎn)、9號(hào)控制點(diǎn)和10號(hào)控制點(diǎn)距離計(jì)算該地裂縫走向32°、長(zhǎng)度776.1 m,誤差為0.536 m。通過(guò)模型放大縮小功能仔細(xì)觀察其全段情況,發(fā)現(xiàn)該地裂縫未進(jìn)行填埋等恢復(fù)措施,整個(gè)地裂縫絕大部分區(qū)域植被覆蓋條件較差,判斷其斷裂部位為人為填埋。

圖9 DEM地面沉陷區(qū)域與數(shù)據(jù)計(jì)算Fig.9 DEM ground subsidence area and data calculation
3.3.3 地面沉陷
研究區(qū)處于緩坡丘陵地區(qū),由于長(zhǎng)年的地下開(kāi)采,地面上方的巖土體失去支撐,從而導(dǎo)致了地面沉陷。礦產(chǎn)資源開(kāi)發(fā)利用中地面沉陷常與地裂縫相伴生,尋找地裂縫的同時(shí),往往也能找到地面沉陷區(qū)域。通過(guò)DOM模型可以觀察到該沉陷區(qū)域但較難觀察到清晰的邊界,僅能在研究區(qū)北部看到一環(huán)狀區(qū)域。不過(guò)在DEM模型上可以清晰地觀察到地面沉陷區(qū)域。地裂縫與沉陷區(qū)特別靠近,幾乎為沉降區(qū)域的東邊界,通過(guò)DEM模型可以有效地分析地面沉陷問(wèn)題。模型可以確定沉陷區(qū)域的輪廓、沉陷區(qū)域的面積、區(qū)域最低點(diǎn)相對(duì)沉陷量。
根據(jù)DOM和DEM可以綜合分析地面沉降區(qū)域的位置和輪廓,標(biāo)記如圖9中白色邊框區(qū)域所示,并通過(guò)該軟件計(jì)算面積的出環(huán)狀沉陷區(qū)域面積約0.089 km2,讀取最低點(diǎn)高度與周邊平緩處高度得出地面相對(duì)沉陷量為2.6 m。
3.3.4 結(jié)果分析
建立三維立體模型后,利用Photoscan軟件的實(shí)景縮放功能,可以在高分辨率的條件下顯著觀察到研究區(qū)內(nèi)煤矸石場(chǎng)、地裂縫和地面沉陷的界限、形態(tài)以及對(duì)周邊環(huán)境的影響和治理程度。 同時(shí),利用模型的測(cè)量功能可以讀取到面積、體積、長(zhǎng)度等參數(shù)。
研究區(qū)內(nèi)煤矸石場(chǎng)規(guī)模較大,總面積約0.23 km2,堆積體約1.27×106m3,壓占大量土地。該堆場(chǎng)為新堆積成的矸石場(chǎng)地,仍有運(yùn)矸車(chē)輛在場(chǎng)中作業(yè),大部分區(qū)域覆土綠化,整體復(fù)墾程度較好;區(qū)內(nèi)地裂縫長(zhǎng)達(dá)776.1 m,無(wú)填埋等復(fù)墾措施;地面沉陷區(qū)域約0.089 km2,最低處沉陷量約2.6 m,部分區(qū)域被矸石壓占,面積有所減少。羊場(chǎng)灣煤礦一分礦南部該1 km2區(qū)域內(nèi)除煤矸石場(chǎng)復(fù)墾程度較好外,地裂縫和地面沉陷區(qū)域治理相對(duì)較差,應(yīng)及時(shí)科學(xué)防范,采取針對(duì)性措施,進(jìn)行土地復(fù)墾。
3.4 建模方法優(yōu)點(diǎn)及可行性
綜上所述,小型四旋翼無(wú)人機(jī)結(jié)合Photoscan軟件的三維立體建模方法在礦山地質(zhì)環(huán)境調(diào)查中應(yīng)用是可行的。小型四旋翼無(wú)人機(jī)相比機(jī)載紅外、機(jī)載Lidar、機(jī)載RTK等設(shè)備購(gòu)置價(jià)格較低且使用與維護(hù)較為方便,同時(shí)舊版本開(kāi)源的Photoscan軟件可免費(fèi)在公眾領(lǐng)域獲得,設(shè)備與軟件使得該方法可有效地控制成本。小型四旋翼無(wú)人機(jī)操作簡(jiǎn)單易上手。Photoscan軟件具有高度的自動(dòng)化,只需要在軟件里進(jìn)行人工照片篩選和控制點(diǎn)導(dǎo)入即能建立模型。無(wú)人機(jī)航拍與建模過(guò)程只需要近4 h(該時(shí)間為筆者電腦配置所耗時(shí)間,配置已在前文中列出,數(shù)據(jù)僅有一定參考性)。相比傳統(tǒng)測(cè)量節(jié)省了人力物力,進(jìn)一步降低了成本,并體現(xiàn)了便捷的優(yōu)點(diǎn)。
小型四旋翼無(wú)人機(jī)與Photoscan軟件建立的模型雖然在計(jì)算方面點(diǎn)精度低于機(jī)載Lidar與機(jī)載RTK等高成本方法,但在線段與面積的計(jì)算上精度較高。其線段相對(duì)誤差小于0.5%,面積相對(duì)誤差小于1%,兩者的相對(duì)誤差隨數(shù)值增大精度進(jìn)一步降低,該方法在1 km2內(nèi)可做到較高精度的測(cè)量。
4 結(jié) 論
1) 小型四旋翼無(wú)人機(jī)結(jié)合Photoscan軟件建立三維立體模型的方法在礦山地質(zhì)環(huán)境調(diào)查中的應(yīng)用是可行的。此方法較之傳統(tǒng)測(cè)量和機(jī)載RTK、機(jī)載Lidar等技術(shù)方法能更好地控制成本,具有便捷的優(yōu)點(diǎn)。該方法為礦山地質(zhì)環(huán)境調(diào)查提供了新的立體建模手段,
2) 結(jié)合地面控制點(diǎn)與無(wú)人機(jī)GPS模塊在1 km2范圍內(nèi)可以做到較高精度的長(zhǎng)度和面積的測(cè)量,其中長(zhǎng)度相對(duì)誤差小于0.5%,面積相對(duì)誤差小于1%,隨數(shù)值增大相對(duì)誤差減小。構(gòu)建的立體模型能夠直觀且較準(zhǔn)確地定量評(píng)價(jià)礦山地質(zhì)環(huán)境問(wèn)題(如煤矸石堆場(chǎng)面積、體積;地裂縫長(zhǎng)度、寬度;地面沉陷面積與沉陷量等)。
3) 本次研究依然有許多不足之處:首先,模型點(diǎn)誤差相對(duì)于其他方法較高;其次,對(duì)無(wú)人機(jī)攝取圖片的數(shù)量、高度、角度等方式與模型精度的相關(guān)性并沒(méi)有做深入探索;最后,還有不同電腦配置的建模耗時(shí)沒(méi)有做出對(duì)比,理論條件下更高配置耗時(shí)更短。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44