水下航行器基礎運動控制仿真研究?
2021-04-06 07:13:52
艦船電子工程 2021年3期
(海裝上海局駐上海地區(qū)第七軍代室 上海 201108)
1 引言
當前水下無人航行器(Unmanned Underwater Vehicle)在軍用和民用領域飛速發(fā)展,并在工程實踐中發(fā)揮著越來越重要的作用[1,2]。水下無人航行器的驅(qū)動模式主要有舵槳推進操縱、推進器推進操縱、仿生推進操縱等多種形式,其中舵槳操縱具有總體簡潔、阻力性能好、可靠性高等優(yōu)勢,應用最為廣泛[3]。舵槳操縱形式的UUV六自由度空間運動具有典型的耦合性和非線性特征,使其運動控制非常復雜[4~5]。研究UUV的運動仿真技術(shù)、建立UUV的基礎運動控制方法,對UUV的設計和應用具有重要的意義[6]。
文中基于剛體的動量定理和動量矩定理得出的UUV動力學方程,結(jié)合空間運動方程,建立起UUV的六自由度空間運動的數(shù)學模型[7~8]。并針對某小型UUV概念設計階段模型的水動力參數(shù),基于龍格-庫塔法求解微分方程,編寫相應的六自由度運動仿真程序,實現(xiàn)對UUV空間運動的計算機仿真。采用比例-微分(PD)[9]控制方法對該UUV的速度、艏向、深度這三個基礎運動進行控制[10]。通過對UUV基礎運動控制的研究,可對UUV的操縱性能評估提供參考,還能夠為UUV的路徑規(guī)劃、路徑跟蹤等應用研究提供底層技術(shù)支撐。
2 UUV空間運動方程
2.1 運動方程建立
研究中采用ITTC建議的用以描述水下航行器運動的坐標系[11~12]。固定坐標系O-XYZ,或稱全局坐標系,原點O定在水面或水中一固定點,OX軸一般水平指向北方;OZ軸豎直指向地心,OY與OX軸和OZ軸構(gòu)成右手系。運動坐標系o-xyz,或稱局部坐標系,為非慣性系,坐標原點o固定航行器上某一點,ox軸指向艏正前方;oz軸垂直ox軸指向底部;oy軸與ox軸、oz軸構(gòu)成右手系。本研究中,運動坐標系原點設在UUV浮心位置,固定坐標系原點在UUV運動的初始位置。
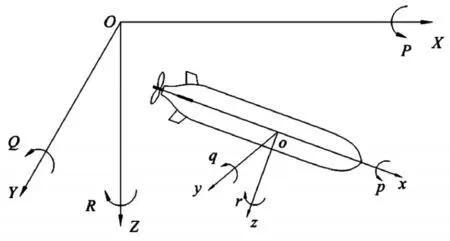
圖1 水下航行器坐標系
在運動坐標系原點位于固定坐標系原點時,將固定坐標系進行旋轉(zhuǎn)變換可與運動坐標系重合,變換矩陣和變換方法如下。
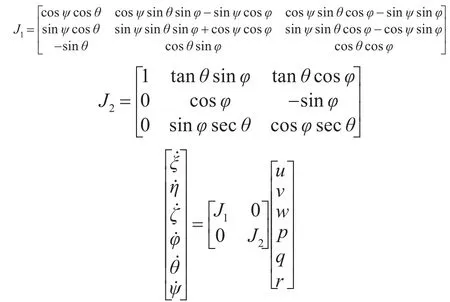
根據(jù)動量定理和動量矩定理導出水下航行器的動力學方程:

式中,M1為航行器的廣義質(zhì)量矩陣,C(V)為航行器自身的科氏力和向心力矩陣。
2.2 水下航行器受力
2.2.1 靜力
水下航行器受靜力作用包括自身的重力與浮力作用。本文中在坐標原點,因此靜力(矩)GP可表示為
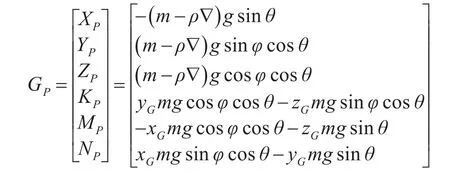
式中,?為水下航行器的排水體積,ρ為流體密度。
2.2.2 水動力
水下航行器所受水動力包括慣性類水動力和粘性類水動力。
對于魚雷形UUV,左右對稱,上下對稱,附加質(zhì)量矩陣如下。
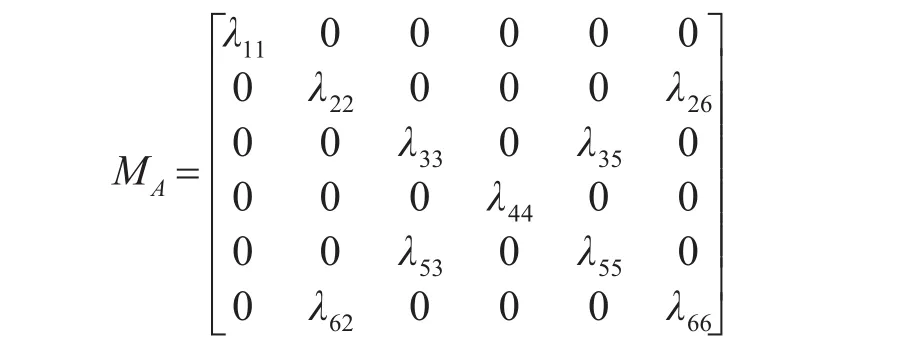
與附加質(zhì)量相關(guān)的慣性類水動力(矩)GA,表達式如下。

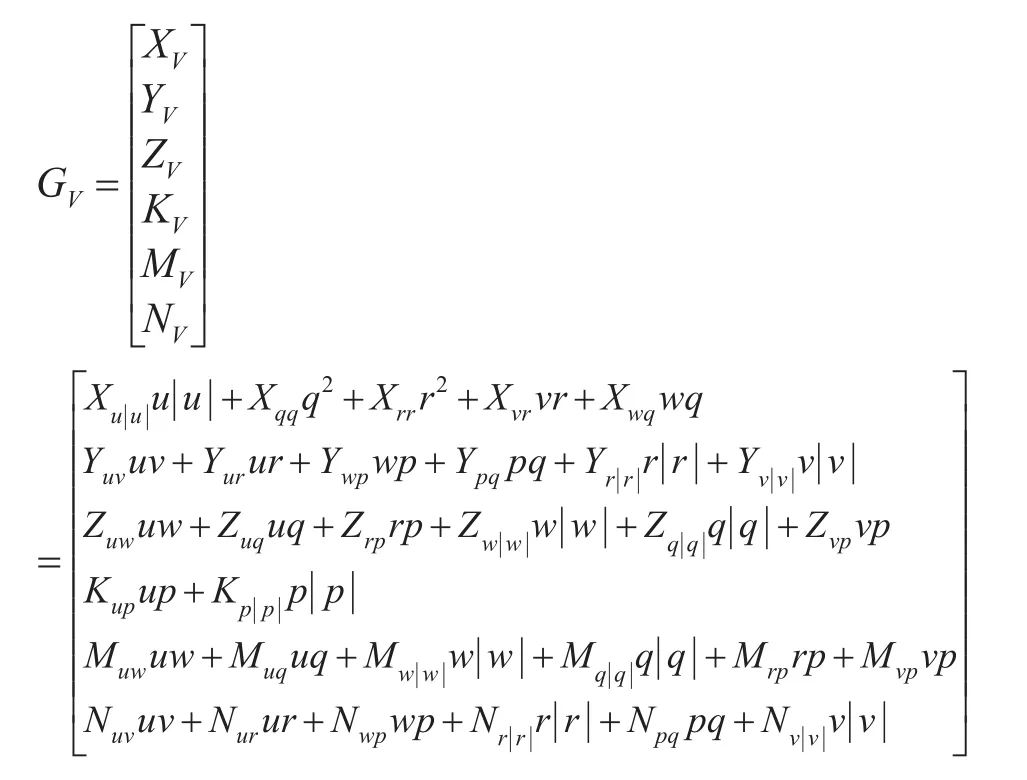
結(jié)合水下航行器的外形特征,可將粘性水動力(矩)GV寫成下列形式。
2.2.3 控制力
針對舵槳操縱的水下航行器,其控制機構(gòu)主要是舵和槳,控制力是舵的力和槳的力。
水下航行器的操縱舵可視為小展弦比的機翼,且通常為對稱翼型。舵在流體中受升力和阻力的作用,升力和阻力的大小與流速和舵升(阻)力系數(shù)相關(guān)。
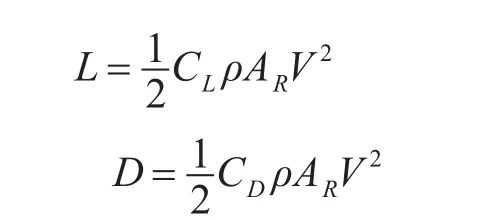
式中,CL和CD分別是舵的升力系數(shù)和阻力系數(shù),與舵角相關(guān),AR是舵面積。
舵的作用可表示為
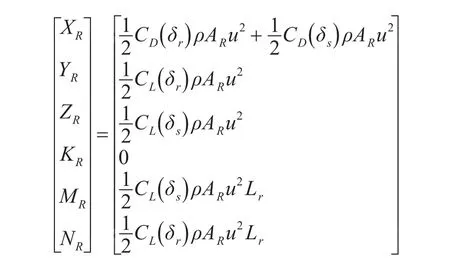
式中,Lr是舵軸距動系坐標原點的距離。
考慮螺旋槳的推力系數(shù)、轉(zhuǎn)矩系數(shù)與無因次量進速系數(shù)相關(guān),進速系數(shù)又由螺旋槳進速、轉(zhuǎn)速和直徑確定,因此將螺旋槳推力和扭矩的作用以轉(zhuǎn)速、進速的函數(shù)來表示。結(jié)合螺旋槳敞水曲線的特點,采用二次多項式簡化的擬合推力系數(shù)曲線和轉(zhuǎn)矩系數(shù)曲線。若有伴流分數(shù)w和推力減額分數(shù)t的值,也可以帶入槳的計算式中。螺旋槳作用力的最終表達式可寫成:
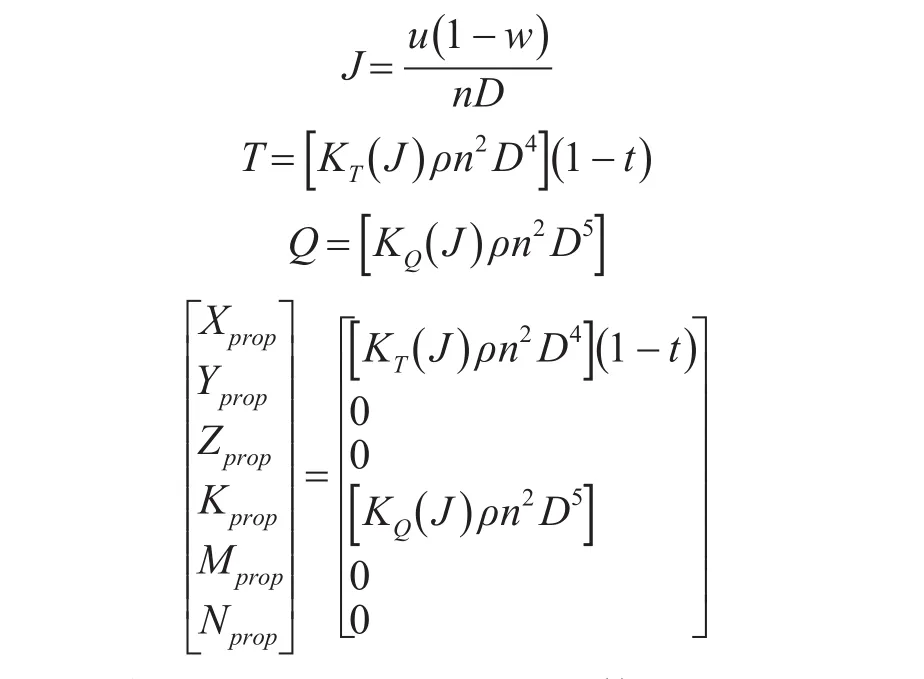
最終,UUV動力學方程可具體的寫成以下的形式。

3 運動仿真
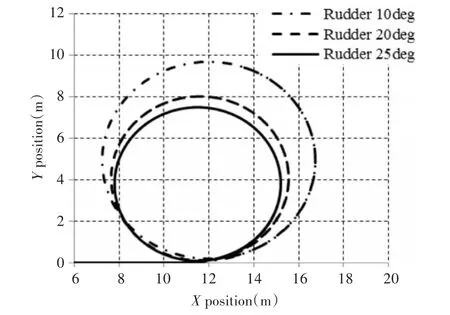
圖2 UUV回轉(zhuǎn)軌跡曲線
基于以上建立的UUV運動方程,采用四階龍格—庫塔法求解偏微分方程,編制UUV六自由度空間運動仿真程序。本文研究的UUV模型,長1350mm,直徑188mm,重30kg。UUV尾部配備一只直徑150mm的常規(guī)螺旋槳,尾部收縮段安裝兩片水平舵和兩片垂直舵。
采用仿真程序?qū)σ?m/s速度直航的UUV進行回轉(zhuǎn)操舵運動進行預報舵角分別為10deg、20deg、25deg。
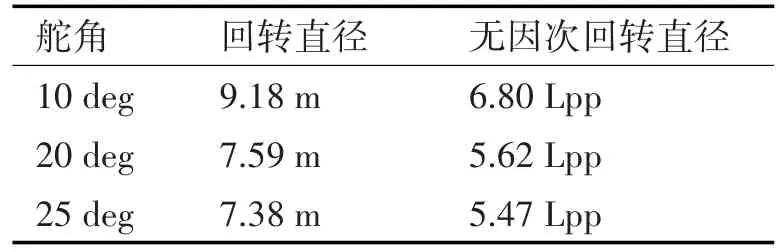
表1 航行器回轉(zhuǎn)直徑
水平面軌跡仿真曲線直觀的仿真出了航行器回轉(zhuǎn)航行的軌跡,并通過軌跡點坐標計算出回轉(zhuǎn)直徑。
4 UUV基礎運動控制
4.1 定速控制
采用PD控制算法對UUV螺旋槳轉(zhuǎn)速進行控制,分別設定UUV前向目標航速0.5m/s,1m/s,1.5m/s,仿真得到的UUV前向航速和螺旋槳轉(zhuǎn)速變化曲線如下所示。

圖3 UUV航速變化曲線
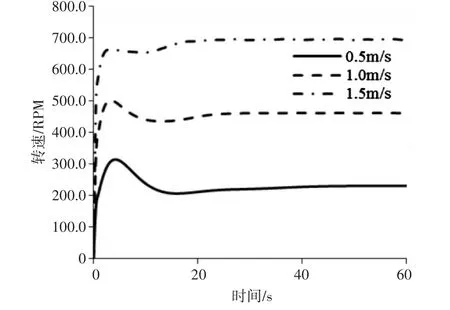
圖4 螺旋槳轉(zhuǎn)速變化曲線
從UUV航速變化曲線可以看出,采用本文中的PD算法,UUV航速在20s左右達到穩(wěn)定,誤差在2%以內(nèi)。
4.2 艏向控制
設定初始狀態(tài)UUV以1m/s速度保持直航,采用PD算法對垂直舵進行控制,使UUV艏向改變30°、60°、90°,仿真得到的UUV艏向角和垂直舵角變化曲線如下所示。

圖5 UUV艏向變化曲線
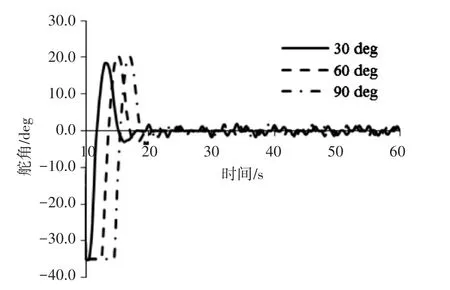
圖6 UUV垂直舵舵角變化曲線
從UUV艏向和垂直舵舵角變化曲線可以看出,采用本文PD控制算法,在最大舵角35deg限制條件下,UUV在達到目標艏向后,經(jīng)過7s左右即能穩(wěn)定在目標艏向角。
4.3 深度控制
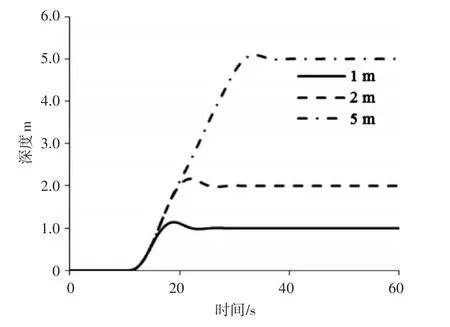
圖7 UUV深度變化曲線
設定初始狀態(tài)UUV以1m/s速度保持直航,采用PD算法對水平舵進行控制,使UUV深度改變1m、2m、5m,仿真得到的UUV深度和水平舵角變化曲線如下所示。
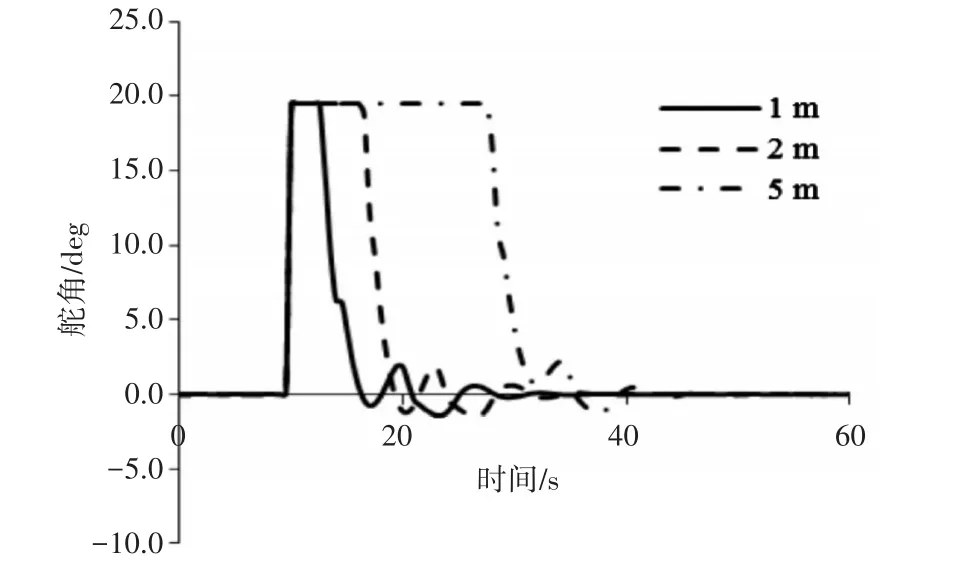
圖8 UUV水平舵舵角變化曲線
從UUV艏向和水平舵舵角變化曲線可以看出,采用本文控制算法,在最大舵角20deg限制條件下,UUV在達到目標深度后,經(jīng)過5s左右即能穩(wěn)定在目標深度。
5 結(jié)語
通過對水下航行器運動和受力的分析,建立了水下航行器的動力學方程,編寫了完善的水下航行器運仿真程序。基于建立的水下航行器運動仿真程序,結(jié)合某小型UUV的水動力系數(shù)建立數(shù)學模型,對UUV的運動進行仿真。通過UUV回轉(zhuǎn)試驗驗證了程序的可行性。基于PD算法,分別對UUV航速、艏向、深度控制進行了數(shù)值模擬,得到相應運動仿真結(jié)果,實現(xiàn)了UUV基礎運動控制目的。
水下航行器運動仿真程序的建立,為研究水下航行器運動控制提供了有效的研究工具。結(jié)合仿真程序,能夠在計算機中實現(xiàn)對控制算法的效果仿真、評估,并能通過仿真效果對控制算法進行針對性的修改。