基于改進卡爾曼濾波的激光補給無人機跟瞄方法研究
2021-04-07 12:22:02袁建華趙子瑋洪滬生
激光與紅外 2021年3期
袁建華,趙子瑋,李 尚,劉 宇,洪滬生,黃 開
(三峽大學電氣與新能源學院,湖北 宜昌 443000)
1 引 言
在未來信息化的社會中,由于無人機體型小、靈活性高、操作方便,無人機在各領域中扮演著越來越重要的角色[1]。為了進一步滿足無人機長時間工作的要求,提高無人機的續航能力已經成為了當今時代一個熱門話題。激光充電相比于太陽能充電具備以下優點:(1)不受天氣影響,能保證高效率充電的必要條件;(2)激光的照射角度可以人為控制,保證太陽能電池始終輸出最大功率。太陽能電池板和激光器技術日益成熟,利用激光為無人機充電概念被提出[2]。這一概念的提出,對于無人機長時間的飛行的可能性提供了能量基礎。
當前,對于激光充電來說最重要的是激光發射的精確度,要求激光跟蹤的精度至少達到厘米級,如果激光偏離了無人機能量接收裝置,充電效率則為0。所以無人機激光無線能量APT系統的可靠性對充電效率有著直接影響[3]。文獻[1]中采用了基于DSP的激光跟蹤系統,通過采集運動目標反射的激光信息來對目標進行跟蹤。文獻[2]中采用了基于四象限探測器的激光跟蹤系統,通過測量激光在安裝在無人機上的四象限探測器上偏移量,來向地面伺服跟蹤系統發出實時的反饋,達到對無人機跟蹤的目的。文獻[3]中建立了對無人機遠程激光充電的系統模型,分析了各方面誤差的變化對系統瞄準精度影響的問題,在此基礎上對各項誤差進行合理的分配處理,為后續研究提供了理論依據。文獻[4]中對激光自動系統進行了研究,采用了人工智能技術對伺服跟蹤系統的PID參數進行實時的更正,并且通過ZN算法找到PID的最優參數,來達到較高的跟蹤精度,證明了通過激光來給無人機進行能量補給的可行性[4-6]。以上文獻在如何跟蹤無人機方面均做了相應的研究,但是對無人機下一時刻運動位置的預測還鮮有研究。本文為了進一步提高激光跟蹤瞄準的準確度,實現高效率的無線激光能量傳輸,本文將提出一種新的自適應卡爾曼濾波算法,對無人機的運動位置進行預測和實時的追蹤,提高激光照射準確度,改善持續充電性能。
2 能量遠程供應系統
如圖1所示,此能量遠程供應系統主要分為能量發射系統與能量接受系統。其中能量發射系統包括電源、激光器、光電轉化系統、跟蹤系統等,能量接收系統主要為無人機上的光伏電池板[7-9]。
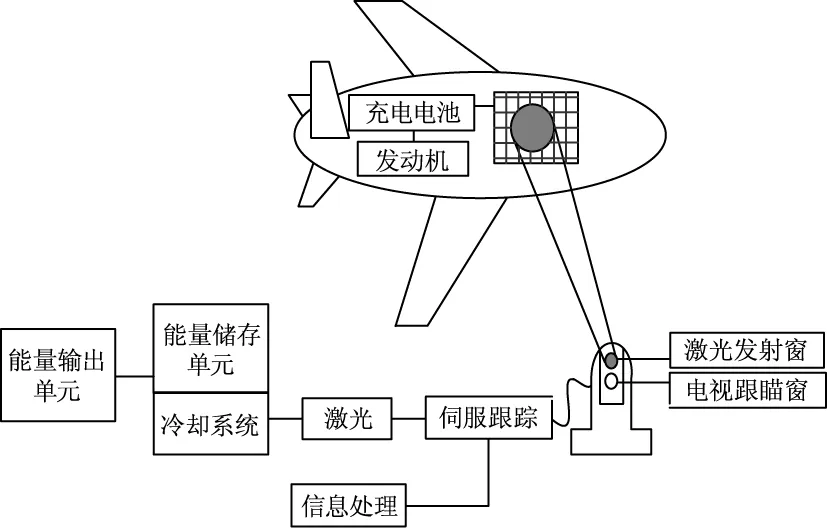
圖1 能量遠程供應系統
工作原理為無人機通過Zigbee通信模塊與地面端發送信息,通過GPS定位無人機的大致位置,利用CCD相機捕獲無人機,對無人機進行目標跟蹤[10]。能量發射系統將電能轉化為激光能量,通過伺服跟蹤系統的控制,將激光盡可能準確地發射到無人機上的光伏電池板上,在光伏電池板上再進行光能到電能轉化,穩壓后進行激光能量的傳輸,為無人機工作進行長時間的能量供應,提升無人機長時間工作的可能性[11]。
3 伺服跟蹤系統控制
伺服跟蹤系統種類多樣,包括控制器,被控對象,執行環節,檢測環節,比較環節五部分。現在的大部分伺服跟蹤系統都采用傳統的伺服跟蹤系統(如圖2所示)。傳統的伺服跟蹤系統主要采集位置和速度兩個參量[12-13],由于缺少空間的位置信息和角速度信息的采集,所以無法實現復合追蹤。

圖2 傳統伺服跟蹤系統結構原理框圖
本文主要根據無人機實時的狀態進行數據的采集分析,對信息采集的時間延遲做一定的處理,采用基于貝葉斯狀態濾波估計對角速度進行測量。在傳統的伺服跟蹤系統中加入角速度的反饋信號,實現復合跟蹤(如圖3所示)。

圖3 改進后的復合跟蹤系統結構框圖
4 自適應卡爾曼濾波算法的無人機跟蹤系統
4.1 傳統的卡爾曼濾波算法
卡爾曼濾波算法是一種基于最小均方誤差的最優線性遞歸濾波方法,以狀態方程和觀測方程為基礎,在含有噪聲的信號中提取有用的信號,運用遞歸方法來預測線性系統變化[14]。在實際應用中,系統離散化的過程方程和測量方程分別為:
xk=Ak|k-1xk-1+wk-1(4-1)yk=Hkxk+vk
(1)
其中,xk為k時刻的系統狀態向量;yk為系統的觀測向量;wk-1為狀態系統噪聲;vk為觀測系統噪聲,均符合高斯分布;A為系統狀態轉移矩陣;H為系統狀態觀測矩陣。
由于卡爾曼濾波通過迭代來消除估計誤差,而估計誤差存在傳遞性,所以估計誤差如果偏大,會隨著迭代的過程一步步偏移真實值,當預測值偏離真實值過大時,卡爾曼濾波算法失效[15]。所以本文提出采用自適應卡爾曼濾波算法,對卡爾曼增益的值進行修正,使估計值更加貼近真實值,提高預測精度。
4.2 改進后卡爾曼濾波算法
4.2.1 構建模型
由于無人機在運動過程中每一刻的運動狀態都在發生變化,所以給伺服跟蹤系統的跟蹤帶來極大的非線性問題。所以本文在當前構建模型的基礎上,對模型的參數進行優化,通過觀測殘差信息來消除迭代過程中產生的誤差,對目標的狀態量進行自適應修正。
當無人機在運動過程中存在一定的加速度,如果采用singer模型,那么采用加速度零均值對目標進行描述不合理。若采用半馬爾科夫模型則對加速度均值的初始值的要求較高。若采用Jerk模型在跟蹤目標時,當目標運動發生階躍性變化時發散性較大,容易偏移真實值。大量研究表明,當前統計模型更加適合無人機的運動特性。我們可以用當前統計模型采用非零均值和修正的Rayleigh分布來描述無人機加速度的概率密度,認為在無人機在加速運動的過程中,無人機下一時刻的加速范圍是有限的,只能在當前加速度的鄰域內。
采用非零均值時間相關模型,其一階模型為:

(2)


(3)
在無人機運動的過程中,為了對無人機的運動位置進行實時的觀測與追蹤,需要模型進行實時的修正。經過殘差檢測對無人機模型進行實時的修正,消除迭代過程中產生的誤差,保留觀測中有用的信息,最大化消除觀測過程中產生的干擾信息,降低噪聲,提高預測精度。
(1)狀態預測方程
(4)
(5)
(2)殘差計算
(6)
(7)
(3)參量調整
αk=λkα
(8)
ck=λkc
(9)
(10)
(4)狀態修正

(11)
(12)
(13)
(5)觀測更新
(14)
(15)
(16)
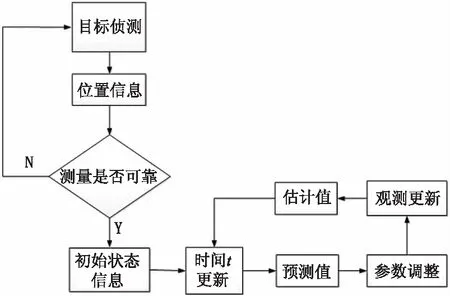
圖4 自適應修正原理框圖
4.2.2 模型參數設置
(17)

(18)

(19)
(20)
(21)
(22)
(23)

對于無人機運動模型參數的更正為:
αk=λkα
(24)
并且認為無人機運動過程中當前時刻加速度的預測值為其加速度的均值:
(25)
同時采用加速度均值的比例形式將運動過程中加速度極值表示:
(26)
其中,c為比例系數,當無人機的運動狀態保持一定范圍內的穩定性的時候;c通常取值較小的經驗值,當無人機的運動狀態發生急劇性的變化時;c的取值變化為ck:
ck=λkc
(27)
其中,λk為無人機運動狀態發生急劇性變化時的系統調節系數。圖5為參數修正框圖。

圖5 目標無人機模型參數修正框圖
5 仿真與結果分析
為了驗證本文提出的方法在提高無人機長時間工作續航能力的可靠性,通過伺服控制系統對無人機的運動進行跟蹤,觀察其跟蹤效果。本仿真基于Matlab仿真平臺構建無人機運動模型,無人機的運動分別采用二階常速運動模型(CV)和三階常加速(CA)線性運動模型,在空間中模擬一段運動,系統噪聲為互不相關的高斯白噪聲,并采用本文的自適應卡爾曼濾波算法對傳統的伺服控制系統進行實時的修正。仿真過程中無人機飛行時間總共為10 s,采樣周期為0.01 s。圖6為模擬無人機運動軌跡跟蹤。

圖6 無人機運動軌跡跟蹤情況
從圖6中可知,改進后的卡爾曼濾波可以預測無人機運動下一時刻的位置狀態,運算速度較快,并且因為預測和檢測大大降低了跟蹤偏離的概率,取得了較好的優化效果,預測軌跡與無人機實際運動軌跡基本相同。圖7、圖8分別為軌跡預測的俯仰角及方位角誤差。

圖7 俯仰角誤差

圖8 方位角誤差
由此可見,本文所提出的自適應卡爾曼濾波算法對無人機軌跡的預測和跟蹤有良好的效果,當得到新的觀測數據時,可以計算出實時處理觀測結果的新的濾波值,它將參數估計和預測有機地結合起來,通過伺服跟蹤系統根據上一時刻無人機的運動位置對運動模型誤差進行實時的修正,有效的避免了誤差累積效應,相比于傳統的卡爾曼濾波算法,本文所提出的方法能夠達到誤差角度在0.1°以內,具有更高的跟蹤精度。
6 結 論
在未來生活中,無人機定會應用到各領域中,激光充電的應用將是無人機行業的發展將是一項里程碑。本文主要在卡爾曼濾波算法的基礎上在伺服跟蹤系統中引入自適應濾波模型,對運動模型誤差進行實時的修正,將參數估計和預測兩者有機地結合起來,經仿真結果表明,所預測軌跡與無人機實際飛行軌跡近似相同,為無人機激光充電提供了更高的瞄準精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39