罐式車輛金屬常壓罐體檢測神經網絡算法探析
2021-04-08 09:34:36周子星
機械管理開發 2021年2期
關鍵詞:檢測
周子星
(湖北省機電研究設計院, 湖北 武漢 430200)
引言
隨著經濟的發展,運送液體危險貨物的罐式車輛使用越來越多,其安全性能也越來越受到監管部門、從業企業以及社會各界的廣泛關注,加強對罐車的檢測和監管,是安全生產的必然要求[1-2]。運送液體危險貨物的罐式車輛的關鍵設備是與定型汽車底盤或半掛車車架永久性連接的常壓罐體(以下簡稱罐體)。在運輸生產的過程中,罐體長期受震動、沖刷、壓力、應力、腐蝕以及人為因素、環境溫度等眾多因素的影響,常常會造成罐體、隔倉板和防波板存在大面積腐蝕、壁厚明顯減薄等現象,甚至發生穿透性開裂[3],出現安全隱患。當前罐體檢測仍多采用人工檢測方式,受技術人員工作水平和工作環境的影響較大[4],隨著計算機圖像處理技術的發展,可以使用超聲導波檢測對罐體設施進行測定與成像,輔助凹紋、裂紋的檢定。
1 金屬常壓罐體的檢測
GB 18564.1—2019 規定:金屬常壓罐體的定期檢查應根據罐體的使用、損傷模式及失效模式制定檢驗方案,必須包括罐體壁厚測定等項目。壁厚測定一般采用超聲測厚方法。測定位置應當有代表性,且有足夠的測點數。厚度測點一般選擇以下位置:液位經常波動的部位,介質進口、流動轉向、截面突變等易受腐蝕、沖蝕的部位,制造成型時壁厚減薄部位和使用中易產生變形及磨損的部位,接管部位,宏觀檢查時發現問題的部位。在壁厚測定時,如果發現母材存在分層缺陷,應當增加測點或者采用超聲檢測,查明分層分布情況以及母材表面的傾斜度,同時作圖記錄[2]。超聲波的頻率越高,功率越大,指向性越好。多采用分辯率高、頻帶寬、抗干擾能力強的窄波,頻率應為0.4~25 MHz,實際工作中我們建議使用1~5 MHz 的超聲波,以便能夠快速便捷、無損傷、精確地檢測、定位罐體的缺陷。
超聲導波檢測技術利用超聲波的物理反射現象,由超聲波換能器發射超聲波并在罐體中傳播。在不同質界面上超聲波具有反射特性,若超聲波在罐體中遇到尺寸等于或大于超聲波波長的缺陷時,超聲波能在缺陷處形成反射波。例如超聲波測厚儀就是根據超生比脈沖反射原理來進行厚度測量的。當探頭發射的超生比脈沖通過被測物體到達材料分界面時,脈沖被反射回探頭,通過精確測量超聲波在材料中傳播的時間來確定被測材料的厚度。
超聲波測厚常用脈沖回波法,如圖1 所示。

圖1 脈沖回波法示意圖
超聲波探頭置于被測罐體表面,主控制器將一定頻率的脈沖信號送往發射電路,經電流放大后激勵壓電式探頭產生重復的超聲波脈沖作為輸入信號,該脈沖波傳至罐壁內側反射產生回波作為輸出信號被探頭接收。此時,測量脈沖波從發射到接收的時間間隔為t,即可測出罐壁厚度d[5]:

式中:c 為超聲波聲速。可用穩頻晶振產生的時間標準信號來測量時間間隔t。
使用超聲波探傷具有探測深度大,檢測速度快,儀器裝置體積小、重量輕、便于現場攜帶,而且檢測時只需消耗耦合劑和磨損探頭,檢測費用較低等特點。利用超聲波對罐體鋼壁進行探傷檢測就可采用缺陷回波法,根據缺陷反射波在熒光屏上的位置和幅度(與參考試塊中人工缺陷的反射波幅度作比較),即可測定缺陷的位置和大致尺寸。透出的超聲波攜帶了被照罐體結構的信息(如對超聲波的反射、吸收和散射等),由聲透鏡匯聚在壓電接收器上,并將所得電信號通過放大器利用掃描系統把罐體結構的形象顯示成像。當被測罐體部位完好時,超聲波將在金屬罐壁內順利傳播到達底面,檢測圖像中只有表示發射脈沖和底面回波的兩個信號。若罐壁中存在缺陷,則在檢測圖像中出現位于底面回波前的缺陷回波。罐體經超聲波掃描后的成像質量,是罐體無損檢測準確度的關鍵。筆者建議利用具有自調節、自適應學習功能的BP 神經網絡算法來實現。
2 罐體掃描成像神經網絡算法及其自適流程
人工神經網絡具有非線性適應性信息處理能力,克服了傳統人工智能在行為模式、語音識別、非結構化信息處理方面的缺陷,使之在人工神經網絡專家系統、模式識別、智能控制、組合優化、預測等領域得到成功應用[6-7]。該方法在工業檢測領域的應用前景廣闊。在利用人工神經網絡實現罐體掃描圖像識別時,需要先把過往的掃描圖像樣本和相對應的檢測識別結果輸入人工神經網絡,神經網絡就會通過其自適應功能進行學習,逐漸記憶圖像特征,建立識別罐體掃描圖像的能力。這里選用四種人工神經網絡算法中的BP 神經網絡算法。
Rumelhart 和 McCelland 等人于 1986 年提出的BP 神經網絡算法(Back Propagation),又稱為誤差反向傳播算法,是人工神經網絡中的一種監督式的學習算法,其組織形式是按誤差逆傳播算法訓練的多層前饋網絡。BP 神經網絡算法可以實現對任意函數的逼近,它由非線性變化神經元組成,其非線性映射能力極強。而且網絡的中間層數量、各層的神經元數量以及神經網絡學習率系數等均可依具體情況設定,具有很強的靈活性。
BP 神經網絡學習過程,包括正向傳遞和反向傳播誤差。在對常壓罐體利用超聲掃描檢測成像時,所用BP 神經網絡算法的學習過程也必須包含兩個方面:一是正向傳遞信息。即輸入層(Input layer)輸入的樣本數據通過一個或多個隱匿層(Hidden layer)按加權公式計算后逐層向后傳遞,直至輸出層(Out layer),如圖2 所示。二是反向傳播誤差,即反饋學習。如果此時的輸出層輸出達不到精度要求,則計算輸出數據的誤差值反向回傳至隱匿層,逐層傳遞直至輸入層。而后比照誤差,修改加權權值,這即是神經網絡的學習、訓練。
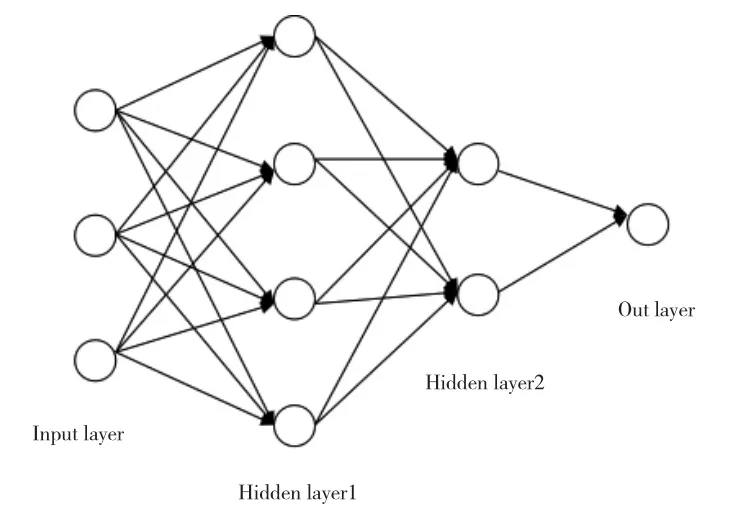
圖2 神經網絡結構圖
使用超聲導波對金屬罐體設施進行檢測時,本文選取超聲波聲時、波幅、頻率作為輸入層導入參數。輸出為反射波幅與距離-波幅曲線比對提取的敏感特征參數損傷標識量,故輸出層僅使用一個神經元。在檢測和缺陷定量時,需要對掃查靈敏度進行耦合補償、衰減補償和曲面補償[8]。
罐體掃描成像BP 算法學習訓練自適應流程包括如下幾個方面:首先,建立樣本數據,實現BP 神經網絡的初始化。此時輸入模式由輸入層經中間層向輸出層實現輸入模式順傳播計算。其次是神經元的反饋過程,即誤差逆傳播過程。由希望得到的罐體信息與神經網絡實際輸出之間差距得出的誤差信號,由輸出層經中間層向輸入層逐層修正其加權累積的權重。再次是BP 神經網絡的反復記憶訓練。它是一個模式順傳播計算和誤差逆傳播計算反復交替進行的網絡記憶訓練的循環過程。最后得出達到精度后的神經元,即通過不斷修改權值,使神經網絡的學習收斂于全局誤差的極小值。這樣的工作流程符合經典的Delta 學習訓練規則。
將罐體超聲波掃描的實時特征數據輸入已訓練成功的神經網絡中,進行順傳播計算,將此正向傳播的結果與訓練得到的所有目標值進行比較匹配,輸出罐體結構圖形和分析數據,輔助罐體的檢測。因此,算法中對神經網絡的訓練是其關鍵。
3 BP 神經網絡模型訓練的具體過程
在罐體檢測問題中,BP 神經網絡模型的訓練是對罐體掃描的樣本數據向量(y1,y2,y3,…,yn)進行的一系列處理。其中,在正向傳遞中,神經元積累的刺激是由其他神經元傳遞過來的刺激量和對應的權重之和,用xj表示這種積累,yi表示某個神經元傳遞過來的刺激量,wi表示鏈接某個神經元刺激的權重,得到公式:

當xj完成積累后,完成積累的神經元本身對周圍的一些神經元傳播刺激,將其表示為yj并得到:

神經元積累后的結果xj,對外傳遞刺激yj的處理過程,可用f 函數映射來表示,稱為激活函數(Activation function)。對此映射一般要求有抑止偏離、對關鍵特征的微小變化敏感度高的特質,以提升識別度。習慣對此作出符合Logistic 差分方程的假設,它符合弱假設條件,因此幾乎所有的測試都能滿足其條件,故常選用S 形生長曲線(Sigmoid):
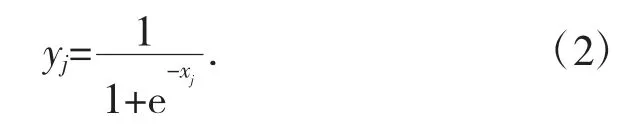
該函數具有嚴格的單調遞增連續性。
其導數可以用自身表示:

以神經網絡模型的上述兩個公式為依據,可以推導出BP 神經網絡輸出結果的計算式。即每個神經元收到刺激yi后進行加權積累產生xj(其中權重記為wji),然后再次通過激活函數產生刺激yj,向下一層與它相連的神經元傳遞,依次類推最終輸出結果。
在誤差反饋學習的反向傳播中,將運用神經網絡的這一輸出值yj和正確值dj對前一層隱匿層的wji進行逐層修正。在這一反饋學習機制中,設dj表示真實正確的結果,并假設誤差為E,則yj-dj就是E對于yj的微分增量,即yj減去yj-dj后就能得到正確值:
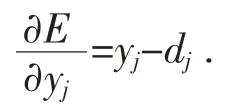
運用神經網絡的輸出值yj和正確值dj對最后一層隱匿層wji的修正,該反饋機制的目標是校準權重wji的誤差量,也就是的值。由式(1)可清晰看出wji與xj相關,按多元微分理論可得出:
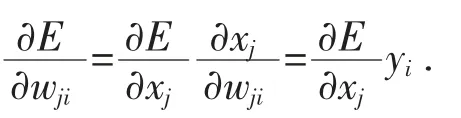
此時,計算wji的誤差量問題就轉換成為求值的問題了:

由式(2)可得出:
故,可用最小二乘法求得權重wji的誤差量為:

最后,設置一個0 到1 之間的學習速率L。學習速率(Learning rate)是調節神經網絡的重要參數,選擇好合適的學習速率。學習速率不能太快,太快將大概率導致越過最優解,建議在實踐中將學習速率取為0.7~0.8,其迭代效率和效果均較好。此時,減去下面結果來修正wji,就可以進入下一輪循環了:
這種神經網絡學習訓練實際上就是反復重復上面的輸入模式,直至達到目標。
BP 神經網絡循環往復訓練的總體算法路線圖如下:
罐體掃描初始樣本讀入;
權值讀入;
for
加權公式計算;//隱匿層for i:1->n
誤差計算;
if 滿足迭代終止條件
停止;
end
反饋回傳;
根據公式修正權值和閾值;
end
其中,設定的迭代終止條件,可以是誤差達到一定的進度要求時終止遞歸,也可以是設定的迭代次數。本算法的實質是對樣本數據的輸入和輸出進行非線性優化,通過負梯度下降算法進行迭代,達到計算求解最優權值的目的[9]。
隨著學習精度的不斷加強,罐體掃描信息的檢測梯度逐漸清晰,其邊緣信息噪聲逐漸排除,提供給檢測人員的數據信息更加精確,使罐體正常區域和缺陷區域的定位更加準確。
4 結論
實驗使用A 型脈沖反射式超聲檢測儀針對碳鋼罐體使用Φ14 mm 雙晶直探頭檢測,頻率選用5 MHz,檢測速度限制在200 mm/s 之內,選用NB/T 47013.3-2015 規定試塊。當缺陷反射波波高達到或超過標定評定線時在周圍執行檢測以確定缺陷的延伸。
聲束縱波近于垂直入射時,反射體回波動態波形較為典型,如下頁圖3 所示。顯示均呈單一且參差不齊回波波形,波幅變化超過6 dB。
人工神經網絡算法在常壓罐體掃描成像檢測工作中的應用,具有并行、容錯糾錯、分布式存儲、自適應、自組織等人工智能特性,使之在復雜的罐體圖像掃描數據處理上擁有強大的優越性,必將成為常壓罐體掃描成像檢測的最重要手段之一。該算法的訓練過程和最終應用于罐體掃描的圖像仿真,對訓練樣本和測試樣本有著很大的依賴性。隨著計算機硬件速度的不斷發展,隨著罐體掃描檢測數據樣本的不斷積累,以及罐體檢測人員技術素質特別是信息識別能力的不斷提高,將更有效地為常壓罐體的安全質量檢測提供保障。
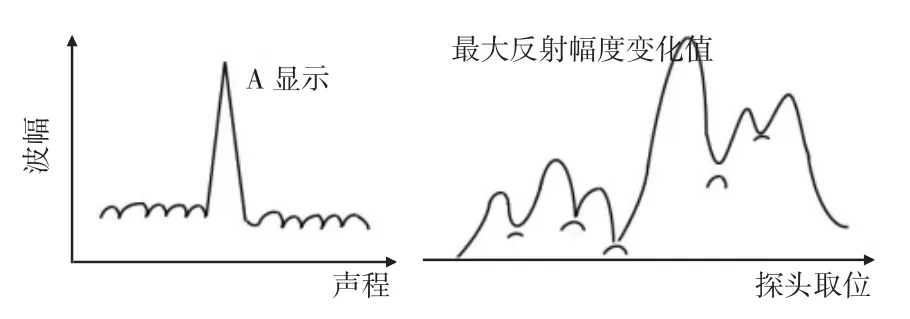
圖3 反射體的回波波形圖
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
